
Équations différentielles, droits d’auteur © 2024 Amir Tavangar, est sous licence internationale Attribution – Pas d’utilisation commerciale – Communication selon les mêmes conditions : 4.0 de Creative Commons, sauf indication contraire.
eCampus Ontario
Équations différentielles, droits d’auteur © 2024 Amir Tavangar, est sous licence internationale Attribution – Pas d’utilisation commerciale – Communication selon les mêmes conditions : 4.0 de Creative Commons, sauf indication contraire.
1
Ce manuel libre d’accès a vocation à rendre l’étude des équations différentielles accessible et attrayante pour tous. Il s’agit d’une ressource principalement destinée aux étudiants et étudiantes en ingénierie, mais qui est aussi polyvalente et pourra être utile dans toutes les disciplines. C’est un outil complet, convenant aussi bien aux personnes débutantes qui abordent les équations différentielles pour la première fois qu’aux plus aguerries souhaitant une remise à niveau. Il ne cherche nullement à prouver des théorèmes ou dériver des formules, mais constitue plutôt un guide étape par étape pour la résolution d’équations différentielles.
Chaque chapitre de ce manuel présente des concepts essentiels et fournit des exemples illustratifs avec des solutions détaillées. Ces exemples sont suivis de questions « Prenons un exemple » pour évaluer votre compréhension. Ces questions sont générées dynamiquement par MyOpenMath, ce qui permet de générer des questions similaires et de fournir un retour d’information immédiat pour faciliter votre processus d’apprentissage.
Incorporant des éléments interactifs tels que des vidéos, des problèmes dynamiques et des graphiques, le manuel est optimisé pour une visualisation sur le web via Pressbook. Cela autorise une interaction totale avec son contenu multimédia, depuis le visionnage de vidéos pédagogiques jusqu’à l’utilisation de graphiques dynamiques et d’ensembles de problèmes. Une version PDF téléchargeable est disponible, mais elle n’inclut pas les fonctions interactives du format web.
Ce projet a bénéficié du soutien et du financement du gouvernement de l’Ontario et du Consortium ontarien pour l’apprentissage en ligne (eCampusOntario). Les avis exprimés dans cette publication sont les avis de leur(s) auteur(s) et ne reflètent pas forcément celui du gouvernement de l’Ontario.
![]()
![]()
2
Je tiens à exprimer toute ma reconnaissance pour le soutien et les contributions qui ont rendu cette ressource possible. Je remercie en tout premier lieu le gouvernement de l’Ontario et eCampusOntario, dont le financement et la foi en l’importance de l’accessibilité des ressources éducatives ont joué un rôle déterminant dans la réalisation de ce projet.
Je suis profondément reconnaissant au Dr Mohammad Reza Peyghami pour son expertise et ses commentaires avisés, qui ont été déterminants dans l’élaboration de cette ressource.
De même, je remercie tout particulièrement deux remarquables étudiants en ingénierie, Jazel Paco et Minh Khanh Truong, pour leur perspicacité et leur révision diligente, qui ont considérablement amélioré la qualité et la précision de ce travail.
Enfin, je tiens à exprimer ma gratitude aux multiples scientifiques, mathématiciens et mathématiciennes, et éducateurs et éducatrices dont les travaux fondamentaux sous-tendent les concepts et les méthodes présentés dans cet ouvrage. Bien qu’il ne soit pas possible de citer individuellement toutes leurs contributions dans le texte, leurs efforts collectifs ont été indispensables. La section Bibliographie énumère les ressources clés qui ont contribué à façonner le contenu de cet ouvrage.
3
La version Web de ce manuel est entièrement conforme aux exigences de la Loi sur l’accessibilité pour les personnes handicapées de l’Ontario et obéit aux règles pour l’accessibilité des contenus Web 2.0, normes de niveau AA. En outre, il est conforme à la liste de contrôle de l’accessibilité reproduite en Annexe A : Liste de contrôle de l’accessibilité de la Trousse à outils de l’accessibilité – 2e édition, ce qui garantit son respect des normes d’accessibilité les plus strictes.
Conçu pour être interactif, le manuel comprend des vidéos, des problèmes dynamiques, des graphiques et des simulations, ce qui le rend parfaitement adapté à l’apprentissage en ligne au moyen de Pressbook. Des fonctions d’accessibilité essentielles ont été intégrées dans la version Web afin de répondre aux divers besoins d’apprentissage :
Grâce à cette approche holistique de l’accessibilité, tous les apprenants et apprenantes, quelles que soient leurs capacités physiques, peuvent s’engager efficacement et bénéficier du riche contenu éducatif fourni dans ce manuel.
I
Ce chapitre présente une vue d’ensemble des concepts fondamentaux des équations différentielles ainsi qu’une introduction aux champs de direction pour les équations différentielles du premier ordre.
1.1 Introduction : cette section traite des définitions de base concernant les équations différentielles, y compris leur ordre, les différentes classifications et la nature de leurs solutions.
1.2 Champs de direction : Cette section présente brièvement les champs de direction, un outil permettant de représenter visuellement le comportement des solutions d’équations différentielles du premier ordre sans avoir besoin d’une formule de solution exacte.

Émilie du Châtelet est née à Paris en 1706. Femme d’une intelligence et d’une détermination exceptionnelles, elle a tracé sa propre voie dans le monde des sciences et des mathématiques à l’époque des Lumières, alors dominé par les hommes. En dépit de normes sociétales limitant l’accès des femmes à l’éducation formelle, Mme du Châtelet s’est formée aux mathématiques et à la physique, souvent par des moyens créatifs puisqu’elle n’hésitait pas à se travestir en homme pour assister à des conférences. Son œuvre la plus importante, une traduction et un commentaire des « Principia Mathematica » d’Isaac Newton, reste à ce jour la traduction française de référence. Elle y clarifie et développe les idées de Newton, notamment en élucidant le principe de conservation de l’énergie. Les travaux d’Émilie du Châtelet ont jeté les bases des développements futurs en physique et en mathématiques, notamment dans le domaine des équations différentielles. La ténacité et l’intelligence de cette autrice ont brisé les contraintes de son époque, ouvrant la voie aux futures générations de femmes dans la science, et son héritage continue d’inspirer et de remettre en question les normes de la communauté scientifique.
1
Les équations différentielles (ED) sont des équations mathématiques qui décrivent la relation entre une fonction et ses dérivées, qu’il s’agisse de dérivées ordinaires ou de dérivées partielles. Dans sa forme la plus simple, l’équation différentielle décrit la vitesse à laquelle une quantité change en fonction de la quantité elle-même et de ses dérivées. Les équations différentielles constituent de puissants outils en mathématiques et en sciences, car elles permettent de modéliser un large éventail de phénomènes du monde réel dans diverses disciplines, notamment la physique, l’ingénierie, la biologie, l’économie et bien d’autres. Voici quelques exemples d’équations différentielles.
/(dt)=aP")
/dt=-kQ")
/(dt)=-k(T-T_m)")
/(dx^2 )=-g")
/(dt)+RI=E(t)")
/(dt^2 )+RI+1/C I=(dE)/dt")
/(del t) =beta (del^2 u)/(del x^2)")
L’ordre d’une équation différentielle est l’ordre de la dérivée la plus élevée qui apparaît dans l’équation. Par exemple, si la dérivée la plus élevée est une dérivée seconde, l’équation est du second ordre. Voici quelques exemples :
 (Premier ordre)
(Premier ordre)
/dt^2 -2dy/dt + y= -5x") (Second ordre)
(Second ordre)
 (Troisième ordre)
(Troisième ordre)
/(del t)=5(del^2 u)/(del t^2)") (Second ordre)
(Second ordre)
L’ordre d’une équation différentielle détermine souvent les méthodes employées pour la résoudre. L’ordre d’une équation différentielle est indépendant du type de dérivées impliquées, qu’il s’agisse de dérivées ordinaires ou partielles.
Tout au long de cet ouvrage, nous nous intéresserons principalement aux équations différentielles du premier et du second ordre. Comme vous le découvrirez, les méthodes employées pour résoudre des équations différentielles du second ordre peuvent souvent être facilement étendues aux équations d’ordre supérieur.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=5
Une équation différentielle ordinaire (EDO) est une équation différentielle impliquant une fonction d’une variable indépendante et ses dérivées. Tous les exemples ci-dessus, à l’exception de l’équation de la chaleur, sont des équations différentielles ordinaires.
Une équation différentielle partielle (EDP) est une équation différentielle qui contient des fonctions inconnues à plusieurs variables et leurs dérivées partielles. Les EDP sont utilisées pour formuler des problèmes impliquant des fonctions de plusieurs variables.
Dans cet ouvrage, nous nous intéresserons avant tout aux équations différentielles ordinaires, qui impliquent des fonctions à variable unique. Nous n’aborderons les équations différentielles partielles que dans le dernier chapitre.
Une équation différentielle linéaire est une équation dans laquelle la variable dépendante  et ses dérivées apparaissent à la première puissance, ne sont pas multipliées ensemble et ne sont pas des arguments d’une autre fonction,par exemple
et ses dérivées apparaissent à la première puissance, ne sont pas multipliées ensemble et ne sont pas des arguments d’une autre fonction,par exemple ") or
or ") . La forme générale d’une équation différentielle linéaire est la suivante :
. La forme générale d’une équation différentielle linéaire est la suivante :
 (d^ny)/dx^n+a_(n-1)(x) (d^(n-1) y)/dx^(n-1)+")
 (dy)/dx+a_0(x)y=f(x)")
où est la variable dépendante, est la variable indépendante, sont des fonctions de (qui peuvent être constantes ou nulles) et est une fonction de .
Une équation différentielle non linéaire est une équation dans laquelle la variable dépendante ou ses dérivées apparaissent à une puissance supérieure à un, sont multipliées ensemble ou se présentent sous une forme qui n’est pas linéaire. Par exemple,  n’est pas linéaire puisque
n’est pas linéaire puisque  a une puissance de 2.
a une puissance de 2.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=5
Une équation différentielle est dite homogène si chacun de ses termes est une fonction de la variable dépendante et de ses dérivées. Concernant les équations différentielles linéaires, une équation est homogène si la fonction ") à droite de l’équation est zéro.
à droite de l’équation est zéro.
 (dy)/dx+a_0(x)y=0")
Par exemple, l’équation linéaire /(dx^2 )+3 (dy)/(dx)+2y=0") est homogène parce que tous ses termes sont des fonctions de et de ses dérivées et que l’équation est égale à zéro.
est homogène parce que tous ses termes sont des fonctions de et de ses dérivées et que l’équation est égale à zéro.
Une équation différentielle est non homogène si elle comporte des termes qui ne sont pas uniquement des fonctions de la variable dépendante et ses dérivées. Avec les équations linéaires, cela signifie généralement qu’il existe une fonction non nulle du côté de l’équation. Par exemple, l’équation linéaire /(dx^2 )+3 (dy)/(dx)+2y=xe^x") n’est pas homogène à cause de la présence du terme
n’est pas homogène à cause de la présence du terme  , qui est une fonction de la variable indépendante
, qui est une fonction de la variable indépendante
Une solution d’équation différentielle est une fonction qui satisfait l’équation sur un intervalle ouvert. Cela signifie que, lorsque la fonction et ses dérivées sont introduites dans l’équation différentielle, l’équation est vraie pour toutes les valeurs de l’intervalle. Il y a souvent un ensemble de solutions.
Vérifiez si  + x^2") est une solution de
est une solution de  .
.
Tout d’abord, nous trouvons  puisque cela apparaît dans l’équation :
puisque cela apparaît dans l’équation :
+2x")
 » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> +2") .
.
En remplaçant et du côté gauche de l’équation, on obtient

+2+4sin(2x)+4x^2")

qui est égal au côté droit de l’équation. Puisque satisfait l’équation, il s’agit d’une solution à l’équation.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=5
Prenons maintenant l’équation différentielle  . On peut facilement résoudre cette équation en intégrant :
. On peut facilement résoudre cette équation en intégrant :




, où  est une constante arbitraire, représentant une famille de solutions à l’équation différentielle donnée. Chaque valeur distincte de donne une solution particulière unique, montrant comment diverses conditions initiales peuvent être satisfaites. Cette famille de solutions, qui recoupe toutes les solutions possibles grâce à l’inclusion de la constante arbitraire , est ce que l’on appelle la solution générale de l’équation différentielle.
est une constante arbitraire, représentant une famille de solutions à l’équation différentielle donnée. Chaque valeur distincte de donne une solution particulière unique, montrant comment diverses conditions initiales peuvent être satisfaites. Cette famille de solutions, qui recoupe toutes les solutions possibles grâce à l’inclusion de la constante arbitraire , est ce que l’on appelle la solution générale de l’équation différentielle.
Une solution explicite exprime explicitement la variable dépendante en fonction de la ou des variable(s) indépendante(s). Par exemple, est une solution explicite. Par ailleurs, une solution implicite peut ne pas exprimer directement la variable dépendante, mais satisfait néanmoins l’équation différentielle. Par exemple,  . Il faut savoir qu’il n’est pas toujours possible de trouver une solution explicite.
. Il faut savoir qu’il n’est pas toujours possible de trouver une solution explicite.
Les conditions initiales renvoient aux valeurs spécifiées pour la variable dépendante et éventuellement ses dérivées en un point spécifique. Les conditions initiales permettent de déterminer la solution spécifique (ou particulière) d’une équation différentielle à partir de la solution générale, qui comporte normalement des constantes arbitraires. Par exemple, =y_0") dit que, à l’instant
dit que, à l’instant  , la valeur de est . Le nombre de conditions initiales requises pour une équation différentielle donnée dépend de l’ordre de l’équation différentielle. En général, une équation différentielle d’ordre
, la valeur de est . Le nombre de conditions initiales requises pour une équation différentielle donnée dépend de l’ordre de l’équation différentielle. En général, une équation différentielle d’ordre  nécessite des
nécessite des  conditions initiales. Ces conditions spécifient les valeurs de la fonction et de ses dérivées jusqu’au
conditions initiales. Ces conditions spécifient les valeurs de la fonction et de ses dérivées jusqu’au e") ordre en un point particulier. Par exemple, une équation différentielle de second ordre nécessite deux conditions initiales. Il s’agit souvent de la valeur de la fonction et de la valeur de la première dérivée en un point spécifié.
ordre en un point particulier. Par exemple, une équation différentielle de second ordre nécessite deux conditions initiales. Il s’agit souvent de la valeur de la fonction et de la valeur de la première dérivée en un point spécifié.
Un problème de valeur initiale (PVI) est une équation différentielle avec une ou plusieurs condition(s) initiale(s) qui donne(nt) une solution particulière. Une solution peut ne pas être valable pour tous les nombres réels – il existe un « intervalle de validité », le domaine de la solution.
 ,
, =2") est un problème de valeur initiale, où
est un problème de valeur initiale, où  et
et  peuvent être substitués dans la solution générale de pour trouver , ce qui donne une solution particulière de
peuvent être substitués dans la solution générale de pour trouver , ce qui donne une solution particulière de  .
.
2
S’il est certes utile de disposer d’une formule explicite pour la solution d’une équation différentielle afin de comprendre la nature de la solution, de déterminer où elle augmente ou diminue et d’identifier ses valeurs maximales ou minimales, il est souvent impossible de trouver une telle formule pour la plupart des équations différentielles du monde réel. Par conséquent, d’autres méthodes doivent être employées pour répondre à ces questions. Une approche efficace pour visualiser la solution d’une équation différentielle du premier ordre consiste à créer un champ de direction pour l’équation. Cette méthode donne une représentation graphique du comportement de la solution sans nécessiter de formule explicite.
Supposons que l’équation différentielle du premier ordre ") a des solutions. Pour cette équation, la fonction
a des solutions. Pour cette équation, la fonction ") donne la pente de la courbe de la solution en n’importe quel du plan XY. Dans un champ de direction, ces pentes sont représentées par de petits segments de droite ou des flèches, tracés en un certain nombre de points du plan. Chaque segment a une pente égale à la valeur de en ce point.
donne la pente de la courbe de la solution en n’importe quel du plan XY. Dans un champ de direction, ces pentes sont représentées par de petits segments de droite ou des flèches, tracés en un certain nombre de points du plan. Chaque segment a une pente égale à la valeur de en ce point.
Pour l’équation  , le graphique de la solution traversant le point
, le graphique de la solution traversant le point ") doit avoir une pente de
doit avoir une pente de .
.
La solution générale de l’équation est  . Le champ de direction et certaines des solutions de l’équation pour différentes valeurs de la constante sont représentés dans la figure 1.2.1.
. Le champ de direction et certaines des solutions de l’équation pour différentes valeurs de la constante sont représentés dans la figure 1.2.1.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=89
Figure 1.2.1 Champs de direction et solutions de 
Les flèches dans les champs de direction représentent les tangentes aux solutions réelles des équations différentielles. Ces flèches peuvent être utilisées comme guides pour dessiner les graphiques des solutions de l’équation différentielle, de façon à obtenir une représentation visuelle du comportement des solutions. En suivant ces flèches, la trajectoire d’une solution peut être visuellement tracée dans le temps, de façon à indiquer son comportement à long terme.
II
Ce chapitre traite des équations différentielles du premier ordre, essentielles en science et en ingénierie pour modéliser les taux de changement dans de nombreux phénomènes. Il couvre leur structure, les techniques de résolution et les applications concrètes dans des domaines tels que la dynamique des populations, les processus thermiques et les circuits électriques.
2.1 Équations différentielles séparables du premier ordre : cette section aborde les équations différentielles séparables, une catégorie d’équations du premier ordre dont chacune des variables peut être séparée sur différents côtés de l’équation.
2.2 Équations différentielles linéaires du premier ordre : cette section aborde la résolution d’équations linéaires non homogènes du premier ordre.
2.3 Équations différentielles exactes : cette partie explique les critères qu’une équation doit remplir pour être exacte et présente les méthodes permettant de résoudre ces équations.
2.4 Facteurs intégrants : cette section explique les techniques consistant à utiliser des facteurs intégrants pour transformer une équation non exacte en une équation exacte qui peut être résolue.
2.5 Applications d’équations différentielles du premier ordre : cette dernière section illustre l’utilisation d’équations du premier ordre dans la modélisation de la croissance et de la décroissance, du mélange de substances, des changements de température, du mouvement sous l’effet de la pesanteur et du comportement de circuits.

Mary Cartwright, née en 1900 à Aynho, dans le Northamptonshire, en Angleterre, était une mathématicienne pionnière à une époque où les femmes universitaires étaient rares. Son parcours en mathématiques a commencé à l’université d’Oxford, puis l’a conduite à Cambridge, où elle s’est d’abord intéressée à l’analyse classique. Cependant, c’est au cours de la Seconde Guerre mondiale, alors qu’elle étudiait le problème des ondes radio et de leurs interférences, que Mary Cartwright a fait une découverte révolutionnaire. En collaboration avec J.E. Littlewood, elle s’est penchée sur les équations différentielles non linéaires et leurs travaux ont jeté les bases de ce que l’on appellera plus tard la théorie du chaos. L’incursion de Mary Cartwright dans ce domaine a donné lieu à des résultats déterminants, notamment le théorème de Cartwright-Littlewood et son étude de l’oscillateur de Van der Pol, un concept capital pour la compréhension des systèmes oscillatoires. Ses contributions extraordinaires n’ont pas seulement fait progresser le domaine des mathématiques, mais ont également brisé les barrières entre les sexes, créant ainsi un précédent pour les femmes dans les STIM. La vie de Mary Cartwright a été un mélange de rigueur intellectuelle et de résilience tranquille, laissant derrière elle un héritage qui continue d’encourager les mathématiciens, et en particulier les mathématiciennes, à explorer et à repousser les limites de la connaissance mathématique.
3
Les équations séparables, ou équations à variables séparables, sont un type d’équations différentielles du premier ordre qui peuvent être réarrangées de manière à ce que tous les termes impliquant une variable se trouvent d’un côté de l’équation et que tous les termes impliquant l’autre variable se trouvent du côté opposé. Cette caractéristique les rend plus faciles à résoudre que d’autres types d’équations différentielles. Ces équations représentent souvent des relations non linéaires.
La compréhension et l’application des techniques d’intégration sont cruciales pour la résolution des équations séparables. Il est donc recommandé de se familiariser avec les méthodes d’intégration classiques avant de tenter de résoudre ces équations.
Une équation différentielle du premier ordre est dite séparable si elle peut être écrite sous la forme
 p(y)")
où ") est une fonction de
est une fonction de  uniquement et
uniquement et ") est une fonction de uniquement. Le côté droit est un produit de ces deux fonctions, ce qui permet la séparation des variables.
est une fonction de uniquement. Le côté droit est un produit de ces deux fonctions, ce qui permet la séparation des variables.
Par exemple, l’équation /y^2") est séparable car elle peut être factorisée et écrite sous la forme
est séparable car elle peut être factorisée et écrite sous la forme /y^2)=g(x)p(y)") . En revanche, l’équation
. En revanche, l’équation  n’est pas séparable car le côté droit ne peut pas être factorisé en un produit des fonctions de et .
n’est pas séparable car le côté droit ne peut pas être factorisé en un produit des fonctions de et .
Pour résoudre l’équation ,
1. Séparer les variables : multiplier les deux côtés par  et par
et par =1/(p(y))") » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> dy=g(x)dx")
2. Intégrer les deux côtés :dy=intg(x)dx") » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> =G(x) +C") où est la constante fusionnée d’intégration.
où est la constante fusionnée d’intégration.
3. Trouver la valeur de : si possible, résoudre l’équation obtenue pour afin d’obtenir la solution explicite. Certaines solutions ne peuvent pas être réarrangées et résolues pour , de sorte que la forme implicite obtenue à l’étape 2 peut être la solution finale.
Résoudre l’équation non linéaire
/y^2") .
.
1. En multipliant les deux côtés par et , on obtient
dx")
2. En intégrant les deux côtés, on obtient
dx")

3. En multipliant par 3 et en prenant la racine cubique des deux côtés, on obtient
/2+12x+3C_1)^(1//3)")
En substituant la constant e , on obtient la solution explicite
, on obtient la solution explicite
/2+12x+C_2)^(1//3)")
Résoudre l’équation différentielle
") .
.
Il s’agit d’une équation différentielle séparable car elle peut être exprimée sous la forme  dy=g(x) dx.")
1. En multipliant les deux côtés par et  , on obtient
, on obtient
dy = 6tan^2(2x)dx")
2. En intégrant les deux côtés, on obtient
 dy= int 6 tan^2(2 x) dx")
-6x+C_1")
3. Par l’exponentiation des deux côtés, on obtient
-6x)") where
where ")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=138
Pour résoudre des équations différentielles non linéaires, il est essentiel de prendre en compte l’intervalle de validité, c’est-à-dire la plage de la variable indépendante, généralement , où la solution est définie et se comporte comme il se doit. Cet intervalle est essentiel car les solutions d’équations non linéaires peuvent ne pas être valides pour toutes les valeurs en raison de problèmes potentiels tels que la division par zéro, des logarithmes non définis de nombres non positifs et d’autres opérations indéfinies.
En outre, du fait de la nature des équations non linéaires, certaines conditions initiales peuvent conduire à l’absence de solution ou à des solutions multiples, ce qui souligne la nécessité de sélectionner et de vérifier soigneusement la plage de sur laquelle la solution peut être appliquée. L’intervalle de validité n’est pas toujours immédiatement apparent à partir de l’équation elle-même et dépend souvent à la fois de la forme spécifique de la solution et des conditions initiales.
Résoudre le problème de valeur initiale
 ,
, =4.")
Trouver la solution générale :
Après avoir factorisé  dans le côté droit, l’équation peut être exprimée sous la forme
dans le côté droit, l’équation peut être exprimée sous la forme
/(dx)=2x(7y-1)")
1. En multipliant les deux côtés par et ") , on obtient
, on obtient
=2xdx")
2. En intégrant les deux côtés, on obtient
 =int2xdx")

3. En multipliant par 7 et en exponialisant les deux côtés, on obtient
")
En réarrangeant l’équation et en substituant ") , on obtient la solution explicite
, on obtient la solution explicite
+1)")
Appliquer la condition initiale :
=4")
=4")


La solution du PVI est donc
+1)")
Il n’y a pas de restriction sur le domaine de , de sorte que la solution est valide sur ") .
.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=138
Résoudre le problème de valeur initiale et trouver l’intervalle de validité de la solution.
/(dx)=(5y^2)/(sqrt(x))") ,
, =1/35.")
Trouver la solution générale :
Il s’agit d’une équation différentielle séparable car elle peut être exprimée sous la forme
1. En multipliant les deux côtés par et ") , on obtient
, on obtient
\ dy=5/(sqrt(x))\ dx")
2. En intégrant les deux côtés, on obtient
 \ dx")
+C")
3. En multipliant par -1 et en prenant la réciproque de deux côtés, on obtient la solution explicite
+C)")
Appliquer la condition initiale :
=1/35")
+C) =1/35")
 =1/35")


La solution du PVI est donc
-55)")
Trouver l’intervalle de validité :
Pour établir l’intervalle de validité de la solution, il faut prendre en considération deux contraintes :
 =0″ title= »x>=0″ class= »asciimath mathjax »>).
=0″ title= »x>=0″ class= »asciimath mathjax »>).-55!=0") , cela implique que
, cela implique que  .
.L’intervalle de validité est la plage des valeurs de qui satisfont les deux conditions :
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=138
 sqrt(1-y^2)")
=sin(4/3sin(3x)+C)")
explicitement en fonction de .  e^(4y)")
=-1/4lnabs(-16/5 e^(5x)+C)")

=3")
=(5 e^(2x^2)+1)/2")
/(dx) = (3 y^2)/sqrt(x), \ \ \ y(4) = 1/42")
=-1/(6 sqrt(x) -54)")
Intervalle de validité : uu(81,oo)")
4
Une équation différentielle du premier ordre est dite linéaire si elle peut être écrite sous la forme
Une équation différentielle du premier ordre qui ne peut pas être exprimée sous cette forme est dite non linéaire. Si =0") , l’équation est dite homogène. En revanche, si
, l’équation est dite homogène. En revanche, si ") n’est pas égal à zéro, l’équation est non homogène. Les équations homogènes ont toujours la solution triviale
n’est pas égal à zéro, l’équation est non homogène. Les équations homogènes ont toujours la solution triviale  . Les solutions qui ne sont pas nulles sont des solutions non triviales.
. Les solutions qui ne sont pas nulles sont des solutions non triviales.
Certaines équations peuvent ne pas paraître linéaires d’emblée, par exemple  y = 2sin(x)") , mais elles peuvent être réarrangées pour prendre une forme linéaire :
, mais elles peuvent être réarrangées pour prendre une forme linéaire :
/x^3 y = (2sin(x))/x^3") .
.
Théorème : Si ") et dans l’équation 2.2.1 sont continus sur un intervalle ouvert (a,b), alors il existe une formule unique
et dans l’équation 2.2.1 sont continus sur un intervalle ouvert (a,b), alors il existe une formule unique ") qui est la solution générale à l’équation différentielle.
qui est la solution générale à l’équation différentielle.
Dans cet ouvrage, nous ne mentionnerons pas toujours explicitement l’intervalle lorsque nous chercherons la solution générale d’une équation linéaire du premier ordre spécifique. Par défaut, cela implique que nous recherchons la solution générale sur chaque intervalle ouvert où les fonctions et dans l’équation sont continues.
Pour résoudre l’équation 2.2.1, il faut d’abord supposer que la solution peut être exprimée sous la forme , où est une solution connue à l’équation homogène correspondante (dite équation complémentaire) et ") est une fonction inconnue que nous cherchons à déterminer. Cette approche fait partie d’une technique appelée variation des paramètres, qui est particulièrement utile pour trouver des solutions à des équations différentielles non homogènes. Nous étudierons cette technique plus en détail dans le contexte des équations différentielles du second ordre. En substituant la solution devinée à l’équation, on obtient
est une fonction inconnue que nous cherchons à déterminer. Cette approche fait partie d’une technique appelée variation des paramètres, qui est particulièrement utile pour trouver des solutions à des équations différentielles non homogènes. Nous étudierons cette technique plus en détail dans le contexte des équations différentielles du second ordre. En substituant la solution devinée à l’équation, on obtient
(vy_1)=q(x)")
En simplifiant et en réarrangeant, on obtient
y_1)=q(x)")
Comme est une solution de l’équation complémentaire, , en simplifiant l’expression à la forme . L’intégration des deux côtés nous permet de déterminer =int(q(x))/(y_1(x))dx+C") , ce qui donne pour l’équation 2.2.1 la solution
, ce qui donne pour l’équation 2.2.1 la solution
Maintenant que nous comprenons la dérivation de la solution, décrivons le processus de solution dans les étapes suivantes.
1. Écrire l’équation sous sa forme standard.
 y = q(x)")
2. Calculer le facteur intégrant en laissant la constante d’intégration à zéro, par souci de commodité.
=e^(int p(x) dx)")
3. Intégrer le côté droit de l’équation et simplifier, dans la mesure du possible. Veiller à traiter correctement la constante de l’intégration.
![y(x)=1/(u(x))[int u(x)q(x)dx+C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8046d81727e5e2f09dfbda1f4c74cad3-2.png "y(x)=1/(u(x))[int u(x)q(x)dx+C]")
Parfois, la fonction ") peut ne pas être directement intégrée. En ce cas, il faut conserver la fonction dans sa forme intégrale, plutôt que d’essayer de trouver une solution explicite.
peut ne pas être directement intégrée. En ce cas, il faut conserver la fonction dans sa forme intégrale, plutôt que d’essayer de trouver une solution explicite.
Trouver la solution générale de
/x^2=xcosx") ,
,  0″ title= »x>0″ class= »asciimath mathjax »>
0″ title= »x>0″ class= »asciimath mathjax »>
1. Tout d’abord, il faut multiplier par pour mettre l’équation sous sa forme standard :

Ainsi, =-2/x") et
et =x^2cosx")
2. Le facteur intégrant est donc
=e^(int p(x)dx)=e^(int -2/x dx)=e^(-2ln|x|)=x^-2")
3. En substituant la formule générale, on obtient
int x^-2. x^2 cosx dx")

")

La figure 2.2.1 présente les esquisses des solutions pour différentes valeurs de la constante pour l’exemple ci-dessus.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=2.2#oembed-144
Figure 2.2.1 Graphique de  pour différentes valeurs de la constante
pour différentes valeurs de la constante
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=2.2#oembed-144
Théorème – Existence et unicité des solutions : Si et sont continus sur ") , alors
, alors
a) La solution générale à l’équation non homogène est
b) Si  est un point arbitraire dans , alors le problème de valeur initiale a une solution unique sur
est un point arbitraire dans , alors le problème de valeur initiale a une solution unique sur
Résoudre le problème initial
+4x^2+4x") ,
, =-6")
Trouver la solution générale :
1. Tout d’abord, il faut réarranger l’équation pour la mettre dans sa forme standard :
*y=4x^2+4x")
Donc, =-1/(x+1)") et
et =4x(x+1)") .
.
2. Le facteur intégrant est
=e^(int p(x)dx)=e^(int -1/(x+1) dx)=e^(-ln|x+1|)=(x+1)^-1")
3. En substituant la solution à la formule générale, on obtient
^-1)int (x+1)^-1. 4x(x+1)dx")
int4x dx")
(2x^2 +C)")
Appliquer la condition initiale pour trouver C :
(2(1^2)+C)=-6")
=-6")


La solution du PVI est donc
= (x+1)(2x^2 -5)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=2.2#oembed-144
") de l’équation
de l’équation y+xsec(x)") .
.
=x^5e^(7x)")
")
=1/2 e^(4x)+Ce^(2x)")

=1/2t^6+C t^(4)")
 avec la condition initiale
avec la condition initiale  = 3")
=1/x^2(1+2x^4)")
+4t^2+4t\ ,")
=7")
=(2t^2+3/2)(t+1)")
5
Les équations différentielles exactes sont une catégorie d’équations différentielles du premier ordre qui peuvent être résolues avec une condition d’intégrabilité particulière. Cette section aborde les thèmes suivants : ce qui fait qu’une équation est exacte, comment vérifier cette condition et la méthodologie de résolution de ces équations.
Pour commencer, nous présentons un théorème fondamental, suivi d’un exemple illustrant son application. Ensuite, nous approfondissons le concept d’équations exactes et explorons une méthode pour les résoudre.
Théorème : si la fonction ") a des dérivées partielles continues
a des dérivées partielles continues  et
et  , alors l’équation
, alors l’équation =c") est une solution implicite à l’équation différentielle
est une solution implicite à l’équation différentielle  dx + F_y(x,y) dy = 0") .
.
Ce théorème peut être prouvé en utilisant la différenciation implicite.
Montrer que  est une solution implicite à l’équation différentielle donnée.
est une solution implicite à l’équation différentielle donnée.
dx+(3x^2 y^2+3xy^2+3x)dy=0")
Pour appliquer efficacement le théorème, il faut définir comme la fonction donnée dans la solution. Ensuite, il faut montrer que les termes multipliés par dx et dy sont, respectivement, les dérivées partielles et de  par rapport à et . Ce processus consiste à trouver ces dérivées partielles et à confirmer qu’elles correspondent aux termes respectifs de l’équation différentielle donnée.
par rapport à et . Ce processus consiste à trouver ces dérivées partielles et à confirmer qu’elles correspondent aux termes respectifs de l’équation différentielle donnée.
En laissant =")
 , on obtient ses dérivées partielles :
, on obtient ses dérivées partielles :


Nous observons que et sont équivalents aux expressions multipliées par et  dans l’équation, respectivement, ce qui confirme que est la solution à l’équation différentielle donnée.
dans l’équation, respectivement, ce qui confirme que est la solution à l’équation différentielle donnée.
)_(F_x)dx+underbrace((3x^2 y^2+3xy^2+3x))_(F_y)dy=0")
Nous allons maintenant nous concentrer sur une compréhension plus large des équations différentielles exactes. Considérons une équation différentielle exprimée sous la forme
dx + N(x,y) dy = 0")
qui peut aussi être représentée sous la forme
 + N(x,y) (dy)/(dx) = 0") .
.
Une équation de cette forme est dite exacte s’il y a une fonction telle que ses dérivées partielles et correspondent à ") et
et ") , respectivement. En l’absence d’une telle fonction
, respectivement. En l’absence d’une telle fonction=c") représente une solution à l’équation différentielle.
représente une solution à l’équation différentielle.
Par exemple, les équations  et
et /(dx)=0") sont des exemples d’équations de forme exacte.
sont des exemples d’équations de forme exacte.
Les questions à se poser maintenant sont donc les suivantes :
et, par conséquent, une solution? avec des dérivées partielles et qui correspondent à et , respectivement. Si et ses dérivées partielles  et
et  sont continues, alors les dérivées partielles secondes de doivent être égales à :
sont continues, alors les dérivées partielles secondes de doivent être égales à : =")
")
ou, de manière équivalente,

Cette relation est résumée dans le théorème ci-dessous.
Théorème. Supposons que les dérivées premières de et 
") sont continues dans une région rectangulaire
sont continues dans une région rectangulaire  . L’équation différentielle
. L’équation différentielle
dx+N(x,y)dy=0")
est donc exacte dans si et uniquement si la condition suivante est satisfaite pour tous les ") dans :
dans :
/(dely) (x,y)=(delN)/(delx) (x,y)")
Pour ce qui est de la seconde question sur la résolution d’une équation différentielle exacte, il faut suivre la procédure ci-dessous.
1*. Trouver : si l’équation est exacte, alors /(delx) (x,y)=M") . Intégrer cette équation par rapport à pour trouver une partie de . Il ne faut pas oublier d’inclure une fonction arbitraire de l’autre variable, en l’occurrence .
. Intégrer cette équation par rapport à pour trouver une partie de . Il ne faut pas oublier d’inclure une fonction arbitraire de l’autre variable, en l’occurrence .
=int M(x,y)dx+g(y)")
2. Déterminer la fonction arbitraire :
a. Pour trouver ") ,il faut d’abord déterminer à partir de l’expression obtenue pour F(x,y) à l’étape 1. Comme doit être égal à à partir de l’équation différentielle exacte, il faut définir comme étant égal à et trouver la valeur de
,il faut d’abord déterminer à partir de l’expression obtenue pour F(x,y) à l’étape 1. Comme doit être égal à à partir de l’équation différentielle exacte, il faut définir comme étant égal à et trouver la valeur de ") .
.
b. Après avoir isolé , il faut l’intégrer par rapport à pour obtenir . Définir la constante d’intégration sur zéro. Remplacer le déterminé dans l’expression de afin de terminer.
3. Formuler la solution générale : La solution de est donnée implicitement (sans solution pour ) par
=C")
où est une constante. L’équation représente la famille de courbes qui sont des solutions de l’équation différentielle.
*Remarque : à titre d’alternative, on peut aussi commencer par intégrer /(dely) (x,y)=N") par rapport à , puis suivre les mêmes étapes pour trouver si l’intégration semble plus facile.
par rapport à , puis suivre les mêmes étapes pour trouver si l’intégration semble plus facile.
Déterminer si l’équation est exacte et, si tel est le cas, trouve la solution : 
1) Test d’exactitude :
 » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> /(dely) (x,y)=9y^2")
 » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> /(delx) (x,y) = 9y^2")
Comme , l’équation est exacte.
2) Trouver la solution :
1. Nous savons que  . Nous intégrons par rapport à :
. Nous intégrons par rapport à :
=int3y^3dx+g(y)")
")
2a. Pour trouver , il faut prendre la dérivée partielle de ci-dessus par rapport à :
")
Comme doit être égal à =9xy^2") à partir de l’équation différentielle exacte, il faut définir comme étant égal à trouver la valeur de ou le déterminer par comparaison.
à partir de l’équation différentielle exacte, il faut définir comme étant égal à trouver la valeur de ou le déterminer par comparaison.
En comparant, nous déterminons que  = 0") .
.
2b. En intégrant par rapport à y, on obtient = C") . En définissant la constante d’intégration sur zéro, on obtient
. En définissant la constante d’intégration sur zéro, on obtient =0") , soit
, soit  .
.
3. Ainsi, l’équation différentielle a pour solution implicite

Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=146
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=146
a) Résous le problème de valeur initiale et trouver la solution explicite ") . b) Déterminer l’intervalle de validité.
. b) Déterminer l’intervalle de validité.
e^x dx+9y^2(e^x-3)dy = 0,")
=2")
a)
1) Test d’exactitude :
e^x") » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> /(dely) (x,y)=9y^2e^x")
") » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> /(delx) (x,y) = 9y^2e^x")
Comme , l’équation est exacte.
2) Trouver la solution générale :
Nous avons l’option d’intégrer par rapport à ou d’intégrer par rapport à . Comme les deux intégrales sont aussi simples l’une que l’autre, nous intégrons par rapport à pour varier les choses, en veillant à donner des exemples des deux méthodes.
1.
/(dely) = N")
=int9y^2(e^x-3) dy+h(x)")
 + h(x)")
Il importe d’inclure une fonction arbitraire de , ") , puisque, cette fois, nous intégrons par rapport à .
, puisque, cette fois, nous intégrons par rapport à .
2a. Pour trouver , il faut prendre la dérivée partielle de ci-dessus par rapport à :
")
Comme doit être égal à =(3y^3-1)e^x") à partir de l’équation différentielle exacte, il faut définir comme étant égal à , puis trouver la valeur de
à partir de l’équation différentielle exacte, il faut définir comme étant égal à , puis trouver la valeur de ") ou la déterminer par comparaison.
ou la déterminer par comparaison.
")
=")
e^x")
=-e^x")
2b. En intégrant par rapport à , on obtient= -e^x+C_1") . En définissant la constante d’intégration sur zéro, on a
. En définissant la constante d’intégration sur zéro, on a =-e^x") . Par conséquent,
. Par conséquent,
= 3y^3(e^x-3) -e^x")
3. Ainsi, l’équation différentielle a pour solution implicite
 -e^x = C")
Appliquer la condition initiale :
(e^0-3) -e^0 = C")
-1=C")

La solution du PVI est donc
 -e^x = -49")
Comme nous devons trouver la solution explicite, nous réarrangeons l’équation afin de trouver la valeur de :
 = e^x-49")
/(3(e^x-3))")
((e^x-49)/(3(e^x-3)) )")
b) Trouver l’intervalle de validité :
Pour établir l’intervalle de validité de la solution, nous devons nous assurer que le dénominateur de la fonction rationnelle n’est pas égal à zéro afin d’éviter les expressions indéfinies :

")
L’intervalle de validité pour la solution est donc
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=146
(dy)/(dx) = 0") .
. 
/(dx) = (-10 e^xcos(y)-3y^2/x)/(-10 e^xsin(y)+6yln(x)+2y^2)") .
. +3y^2ln(x)+2/3y^3=C")
e^x dx+6y^2(e^x+3)dy = 0") ,
, =-2") .
. /(6(e^x-1/3))")
6
Face à une équation différentielle du premier ordre non exacte, la méthode des facteurs intégrants fournit un moyen systématique de la transformer en une équation exacte qui peut être résolue. Cette section explore les techniques d’utilisation des facteurs intégrants pour résoudre les équations différentielles.
Parfois, une équation différentielle qui n’est pas exacte au départ peut être transformée en une équation exacte en la multipliant par une fonction appropriée, ") . Prenons l’équation
. Prenons l’équation
dx+2xydy=0") .
.
Elle n’est pas exacte parce que  et
et  ne correspondent pas. Or, si on multiplie l’équation tout entière par une fonction
ne correspondent pas. Or, si on multiplie l’équation tout entière par une fonction  = x") , elle devient
, elle devient
dx+2x^2ydy=0") .
.
Cette équation est maintenant exacte, puisque  . Cette équation modifiée peut alors être résolue par les méthodes d’équation exacte évoquées à la section 2.3.
. Cette équation modifiée peut alors être résolue par les méthodes d’équation exacte évoquées à la section 2.3.
La fonction est un facteur intégrant pour l’équation si, lorsqu’elle est multipliée par l’équation, elle donne une équation exacte. En termes formels, si la multiplication de l’équation différentielle par , comme dans
M(x, y)dx + mu(x, y)N(x, y)dy = 0") ,
,
la rend exacte, alors est le facteur intégrant.
Lorsque vous tombez sur une équation différentielle du premier ordre sous la forme  qui n’est ni séparable, ni linéaire, vous pouvez tout de même la résoudre en trouvant un facteur intégrant spécial. Suivre ces étapes :
qui n’est ni séparable, ni linéaire, vous pouvez tout de même la résoudre en trouvant un facteur intégrant spécial. Suivre ces étapes :
1. Calculer les dérivées partielles : Calculer  et
et  .
.
2. Tester l’exactitude :
, alors l’équation est déjà exacte, aucun facteur intégrant n’est nécessaire. , l’équation n’est pas exacte, il faut trouver un facteur intégrant.
, l’équation n’est pas exacte, il faut trouver un facteur intégrant.3. Trouver un facteur intégrant spécial :
/N") (i). Si (i) est une fonction de uniquement, alors un facteur intégrant est donné par
(i). Si (i) est une fonction de uniquement, alors un facteur intégrant est donné par =e^(int (M_y-N_x)/N dx") . uniquement, calculer l’expression
. uniquement, calculer l’expression /M") (ii). Si (ii) est une fonction de uniquement, alors un facteur intégrant est donné par
(ii). Si (ii) est une fonction de uniquement, alors un facteur intégrant est donné par =e^(int (N_x-M_y)/M dy") .
.4. Appliquer le facteur intégrant : Multiplier l’équation tout entière par le facteur intégrant  de façon à la transformer en équation exacte.
de façon à la transformer en équation exacte.
5. Résoudre l’équation exacte : Une fois que l’équation est exacte, il faut la résoudre au moyen de la méthode présentée à la section 2.3 pour les équations exactes.
Résoudre dx+(x^2y-x)dy=0")
Un rapide contrôle montre que l’équation n’est ni séparable, ni linéaire, ni exacte. Il faut donc vérifier s’il existe un facteur intégrant spécial :
/N=(1-(2xy-1))/(x^2y-x)=(2(1-xy))/(-x(1-xy))=-2/x")
Puisque (i) est la fonction de uniquement, un facteur intégrant est donné par

")
En multipliant =x^(-2)") par l’équation différentielle originale, on obtient l’équation exacte
par l’équation différentielle originale, on obtient l’équation exacte
)dx+(y-x^(-1))dy=0")
En résolvant l’équation par la méthode exacte, on obtient la solution implicite
+(y^2)/2=C")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=148
dx + (x+1)dy = 0")
=e^x")
dx+(x^2y-x)dy = 0")
a)
b) 
dx+(-4x^2y+x)dy = 0")

dx+x(sin(y)-ycos(y))dy = 0")
a) =y/(sin(y)")
b) /(sin(y))=C")
7
La modélisation mathématique est le processus qui consiste à traduire des problèmes du monde réel en langage mathématique. Il s’agit de formuler, de développer et de tester rigoureusement des modèles pour représenter et résoudre des problèmes complexes. Les équations différentielles, qu’elles soient ordinaires ou partielles, jouent un rôle essentiel dans ces modèles. Elles relient une fonction à ses dérivées, qui représentent les taux de changement. Elles sont donc particulièrement adaptées à la modélisation de systèmes dynamiques pour lesquels il est essentiel de comprendre l’évolution des choses.
Dans cette section, nous allons voir comment les équations différentielles du premier ordre sont appliquées dans divers domaines, notamment les processus de croissance et de décroissance, le mélange de substances, la loi de refroidissement de Newton, la dynamique de la chute d’objets et l’analyse des circuits électriques.
L’une des applications les plus courantes des équations différentielles du premier ordre est la modélisation de la croissance ou de la décroissance démographique. Les modèles permettent de comprendre comment les populations évoluent dans le temps en raison des naissances, des décès, de l’immigration et de l’émigration. Le modèle de croissance démographique le plus simple est le modèle de croissance exponentielle, qui suppose un environnement aux ressources illimitées. Il est représenté par l’équation différentielle suivante :
/(dt)=rP")
où  est la taille de la population, et
est la taille de la population, et  est la constante de proportionnalité. La solution de cette équation différentielle séparable est
est la constante de proportionnalité. La solution de cette équation différentielle séparable est
=P_0e^(rt)")
où  est la population initiale à l’instant
est la population initiale à l’instant  .
.
Si <span class= »AM » title= »r , la population décroît exponentiellement et si
, la population décroît exponentiellement et si  0″ title= »r>0″ class= »asciimath mathjax »>, la population croît exponentiellement. Ce modèle implique que la population croît continuellement et sans limites, ce qui n’est démographiquement guère réaliste à long terme compte tenu des limitations de ressources, d’espace, etc. Toutefois, il s’agit d’une bonne approximation pour les populations ne présentant pas de contraintes significatives en matière de ressources ou pour les prévisions à court terme.
0″ title= »r>0″ class= »asciimath mathjax »>, la population croît exponentiellement. Ce modèle implique que la population croît continuellement et sans limites, ce qui n’est démographiquement guère réaliste à long terme compte tenu des limitations de ressources, d’espace, etc. Toutefois, il s’agit d’une bonne approximation pour les populations ne présentant pas de contraintes significatives en matière de ressources ou pour les prévisions à court terme.
Lorsqu’il s’agit de problèmes où les taux d’entrée et de sortie de population d’une région sont différents, il est essentiel de comprendre que le taux global de variation de la population est le résultat de la différence entre le taux d’entrée de la population (immigrations ou naissances) et le taux de sortie de la population (émigrations ou décès). Ce taux peut être représenté sous la forme d’une équation différentielle qui modélise la variation nette de la population au fil du temps. L’approche générale consiste à établir une équation d’équilibre reflétant ces taux :
/(dt)=R_("entrée")-R_("sortie")")
Ici, ") est le taux auquel la population entre dans la région et
est le taux auquel la population entre dans la région et ") est le taux auquel la population quitte la région.
est le taux auquel la population quitte la région.
Une population de poissons dans un lac croît à un rythme proportionnel à sa taille actuelle. En l’absence de facteurs extérieurs, la population de poissons double en dix jours. Cependant, chaque jour, cinq poissons migrent dans la zone, seize sont capturés par les pêcheurs et sept meurent de causes naturelles. Déterminer si la population survivra au fil du temps et, si ce n’est pas le cas, quand elle s’éteindra. La population initiale est de 200 poissons.
/(dt)=(rP(t)+5)-(16+7)")
/(dt)=rP(t)-18,")
=200")
Avant de résoudre ce PVI, il faut trouver en utilisant l’information sur le doublement de la population en dix jours sans facteurs externes. Si la population initiale est de 200, alors elle atteindra 400 en deux jours.
/(dt)=rP(t),")
=400")
La solution générale de cette équation différentielle séparable est
En appliquant la condition initiale, on obtient
=400")
=2")
/10")
Maintenant, revenons à l’équation différentielle originale.
/(dt)=ln(2)/10 P-18,")
Il s’agit d’une équation différentielle linéaire, que nous écrivons sous forme standard :
/(dt)-ln(2)/10 P=-18")
Le facteur intégrant est
=e^(-int(ln(2))/10 dt)=e^(-(ln(2))/10 t)")
La solution générale est
![P(t)=e^((ln(2))/10 t) [int -18 e^(-(ln(2))/10 t) dt+C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f55a70c813a5ab457392aba7ef43166d-2.png "P(t)=e^((ln(2))/10 t) [int -18 e^(-(ln(2))/10 t) dt+C]")
![P(t)=e^((ln(2))/10 t) [18(10/(ln(2)) )e^(-(ln(2))/10 t) +C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/285dc3c2660cdb2056d390829a6697f8-2.png "P(t)=e^((ln(2))/10 t) [18(10/(ln(2)) )e^(-(ln(2))/10 t) +C]")
=180/(ln(2)) +Ce^((ln(2))/10 t)")
En appliquant la condition initiale, on obtient
) +Ce^0=200")

La solution spécifique est donc
=180/(ln(2)) -59.6851 e^((ln(2))/10 t)")
Le terme exponentiel a un exposant positif et croît donc de manière exponentielle. Cependant, comme le coefficient du terme exponentiel est négatif, l’ensemble de la population diminue et finit par disparaître. Pour déterminer quand la population finira par s’éteindre, il faut prendre  et trouver la valeur de
et trouver la valeur de  .
.
) -59.6851 e^((ln(2))/10 t)")
 jours
jours
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=150
Les problèmes de mélanges consistent à combiner des substances ou des quantités et à observer leur interaction dans le temps. Il peut s’agir de polluants dans un lac, de différents produits chimiques dans un réacteur, voire de sucre se dissolvant dans du café. L’élément commun à ces scénarios est le changement de concentration des substances dans un mélange au fil du temps. Les équations différentielles, en particulier celles du premier ordre, permettent de modéliser et de résoudre ces situations dynamiques.
Dans les problèmes de mélanges, ") représente la quantité de substance dissoute dans le fluide, qui évolue avec le temps au débit (
représente la quantité de substance dissoute dans le fluide, qui évolue avec le temps au débit (/(dt)") ). Le débit est influencé par les entrées et sorties de la substance.
). Le débit est influencé par les entrées et sorties de la substance.
Pour un problème de mélanges type, on peut avoir un réservoir contenant une certaine quantité de fluide dans lequel une autre substance est mélangée. La concentration de la substance dans le réservoir change au fur et à mesure que l’on ajoute ou que l’on retire de la substance. L’équation différentielle générale du premier ordre pour un tel scénario est similaire à celle que nous avons examinée pour l’évolution démographique d’une région.
/(dt)=R_("entrée")-R_("sortie")")
Ici, ") est le taux auquel la substance entre dans le système et
est le taux auquel la substance entre dans le système et ") est le taux auquel la substance quitte le système.
est le taux auquel la substance quitte le système.
Prenons une citerne renfermant 2 000 litres d’eau fraîche. En commençant à l’instant , l’eau contenant 0,1 kilogramme de sel par litre est versée dans la citerne au taux de  . Le mélange est maintenu uniforme par agitation et est évacué de la citerne au même rythme qu’il est rempli. a) Formule une équation différentielle pour la quantité de sel dans la citerne () à n’importe quel instant et résous l’équation pour déterminer . b) Déterminer quand la concentration de sel dans la citerne va atteindre
. Le mélange est maintenu uniforme par agitation et est évacué de la citerne au même rythme qu’il est rempli. a) Formule une équation différentielle pour la quantité de sel dans la citerne () à n’importe quel instant et résous l’équation pour déterminer . b) Déterminer quand la concentration de sel dans la citerne va atteindre  .
.
Informations données
 ) est constant puisque les entrées et sorties d’eau sont égales :
) est constant puisque les entrées et sorties d’eau sont égales : 


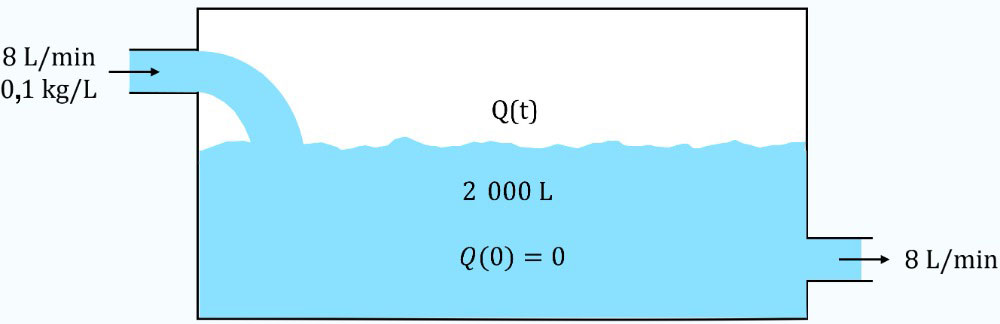
a) Notre tâche consiste à déterminer le taux auquel le sel entre dans la citerne () et le taux auquel il quitte la citerne. Il ne faut pas oublier que le taux auquel l’eau entre dans la citerne est différent du taux auquel le sel pénètre et quitte la citerne.
Le taux auquel le sel entre dans la citerne est le produit de la concentration de sel de l’eau entrante et le débit d’entrée de l’eau :
 = (0,1 "kg/L")(8 "L/min")")

Le taux auquel le sel quitte la citerne est la concentration de sel dans la citerne (rapport entre le sel dans la citerne et le volume d’eau dans la citerne), multipliée par le débit de sortie de l’eau. À tout moment, la quantité de sel dans la citerne est .

)/2000 \ "kg/L")*(8 \ "L/min")")
)/250")
Au départ, la citerne ne contient que de l’eau pure non salée, de sorte que =0") . Ainsi, l’équation différentielle avec une condition initiale devient
. Ainsi, l’équation différentielle avec une condition initiale devient
/(dt)=0,8-(Q(t))/250") ,
,
L’équation différentielle est séparable (et linéaire) et peut donc être facilement résolue. La solution du PVI est
=200(1-e^(-t/250))")
Cette équation nous donne le volume de sel dans la citerne en kilogrammes à tout instant t après le début du processus.
b) Pour déterminer quand la concentration de sel dans la citerne atteint , il faut d’abord trouver une équation pour la concentration en termes de temps. La concentration est le rapport entre la quantité de sel et le volume d’eau. Le volume reste constant à 2 000 litres. Ainsi, la concentration ") à l’instant t est la quantité de sel divisée par le volume total :
à l’instant t est la quantité de sel divisée par le volume total :
=(Q(t))/V \ "kg/L"")
=200/2000(1-e^(-t/250))")
)")
Maintenant, il faut trouver la valeur de t quand =0,04 \ "kg/L"") .
.
=0,04")
)=0,04")
=1,4")
")

La concentration de sel dans la citerne atteindra 0,04 kg/L environ  minutes après le début du processus.
minutes après le début du processus.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=150
La loi de refroidissement de Newton décrit la vitesse à laquelle la température d’un objet change lorsqu’il est exposé à un environnement dont la température est différente et constante. Le principe fondamental est que le taux de variation de température (/(dt)") ) est proportionnel à la différence entre la température de l’objet (
) est proportionnel à la différence entre la température de l’objet ( ) et la température ambiante (
) et la température ambiante ( ). L’équation différentielle représentant la loi de refroidissement de Newton est donc
). L’équation différentielle représentant la loi de refroidissement de Newton est donc
/(dt)=-k(T-T_s)")
Dans cette équation, représente la température de l’objet à n’importe quel instant , est la température ambiante constante,  est une constante positive dépendante des caractéristiques de l’objet et de son milieu environnant et est le taux de variation de la température. Lorsque la température initiale est dénotée par
est une constante positive dépendante des caractéristiques de l’objet et de son milieu environnant et est le taux de variation de la température. Lorsque la température initiale est dénotée par  , le problème de valeur initiale est
, le problème de valeur initiale est
/(dt)=-k(T-T_s), \ \ T(0)=T_0")
Cette équation différentielle est séparable (et linéaire), et a pour solution
Le signe négatif de l’exposant indique que la différence de température entre l’objet et son milieu environnant diminue exponentiellement avec le temps. Cette formule est valable même si l’objet est initialement plus chaud ou plus froid que son milieu environnant, décrivant à la fois les processus de refroidissement et de réchauffement selon les hypothèses de la loi.
Prenons un microprocesseur fonctionnant dans un environnement dans lequel la température ambiante est constante à 25 ◦C. Après une longue période de fonctionnement, la température du microprocesseur est de 75 ◦C. Une fois l’appareil éteint, le microprocesseur commence à refroidir jusqu’à atteindre la température ambiante. Supposons que la constante de refroidissement caractéristique pour ce scénario, qui dépend des propriétés de transfert de chaleur du microprocesseur et de son système de refroidissement, est de 0,07/min. a) Trouver l’équation de la température du microprocesseur. b) Quelle sera la température du microprocesseur dix minutes après l’arrêt de l’appareil? c) Combien de temps faudra-t-il pour que le microprocesseur refroidisse à 35 ◦C?
Informations données :



a) En introduisant les valeurs données dans la solution de l’équation de la loi de refroidissement de Newton, l’équation de la section 2.5.1, on obtient la formule pour ") .
.
 = T_s +(T_0-T_s)e^(-kt)")
 = 25 +(75-25)e^(-0,07t)")
b) Pour trouver la température du microprocesseur dix minutes après l’arrêt de l’appareil, il faut introduire  minutes dans .
minutes dans .
 = 25 +(75-25)e^(-0,07(10))")

c) Pour trouver quand la température sera de 35 ◦C, il faut réarranger la formule quand =35^@C") .
.
e^(-0,07t)=35")
=1/5")
/0,07")
 minutes
minutes
Il faut 23 minutes au microprocesseur pour refroidir à 35 ◦C.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=150
La dynamique de la chute d’objets est un exemple classique de la façon dont les équations différentielles modélisent des situations du monde réel. Ce phénomène est directement lié à la deuxième loi du mouvement de Newton, qui stipule que la force agissant sur un objet est égale à la masse de l’objet multipliée par son accélération.

Dans cette équation, la force peut dépendre du temps (), du déplacement () et de la vitesse ( ). Pour ce qui est des équations du premier ordre, nous considérons généralement des problèmes où ne dépend pas de , car l’inclusion conduit souvent à des équations d’ordre supérieur. Étant donné que l’accélération de l’objet (
). Pour ce qui est des équations du premier ordre, nous considérons généralement des problèmes où ne dépend pas de , car l’inclusion conduit souvent à des équations d’ordre supérieur. Étant donné que l’accélération de l’objet ( ) est
) est  , l’équation de la deuxième loi du mouvement de Newton devient
, l’équation de la deuxième loi du mouvement de Newton devient
") .
.
La résolution de cette équation permet d’obtenir en fonction du temps.
Le modèle le plus simple de chute d’un objet applique la deuxième loi de Newton en considérant la pesanteur comme la seule force agissant sur l’objet. Ici, la force due à la pesanteur est, ce qui donne l’équation différentielle
où est l’accélération due à la pesanteur, la masse étant supposée constante. Ce modèle part du principe qu’il n’y a pas de résistance de l’air et que le champ gravitationnel est uniforme. La valeur approximative de  est
est  (unité métrique) ou
(unité métrique) ou  (unité britannique). Le signe de
(unité britannique). Le signe de  change en fonction de la convention de direction que l’on définit pour un problème. Par exemple, si l’on décide que la direction ascendante est positive, puisque la force due à la pesanteur est descendante, l’équation est simplifiée comme suit :
change en fonction de la convention de direction que l’on définit pour un problème. Par exemple, si l’on décide que la direction ascendante est positive, puisque la force due à la pesanteur est descendante, l’équation est simplifiée comme suit :
En réalité, lorsqu’un objet tombe, il rencontre la résistance de l’air, qui s’oppose au mouvement de l’objet. La force nette exercée sur l’objet devient alors une combinaison de la pesanteur et de la résistance de l’air, ce qui modifie l’équation en
où  est la force de la résistance de l’air.
est la force de la résistance de l’air.
La force de la résistance de l’air est souvent proportionnelle à la vitesse de l’objet, de sorte que  , où est une constante de proportionnalité (valeur positive) qui représente le coefficient de la résistance de l’air. Lorsque l’on résout des problèmes impliquant des forces et des mouvements, il est important de veiller à ce que les conventions relatives aux directions positives et négatives soient cohérentes.
, où est une constante de proportionnalité (valeur positive) qui représente le coefficient de la résistance de l’air. Lorsque l’on résout des problèmes impliquant des forces et des mouvements, il est important de veiller à ce que les conventions relatives aux directions positives et négatives soient cohérentes.
Au fur et à mesure que l’objet tombe, la résistance de l’air augmente avec la vitesse jusqu’à ce qu’elle équilibre la force gravitationnelle. À ce point d’équilibre, la force nette est nulle et l’objet n’accélère plus, atteignant une vitesse constante, appelée vitesse limite de chute.
Prenons un objet ayant une masse de 25 kg et se déplaçant initialement vers le bas à une vitesse de -29 m/s. En chutant, l’objet traverse l’atmosphère, qui exerce une force de résistance à son mouvement. La force de résistance est proportionnelle à la vitesse de l’objet. Plus précisément, lorsque la vitesse de l’objet est de 2 m/s, on sait que la force de résistance est de 20 N. a) Écris l’équation différentielle décrivant le mouvement de l’objet en termes de vitesse et de temps. b) Résous l’équation différentielle pour trouver la vitesse de l’objet en fonction du temps, ") . c) Détermine la vitesse limite de chute de l’objet.
. c) Détermine la vitesse limite de chute de l’objet.
Informations données


a) La vitesse descendante est exprimée par une valeur négative. Par conséquent, la direction ascendante est positive et la direction descendante est négative.
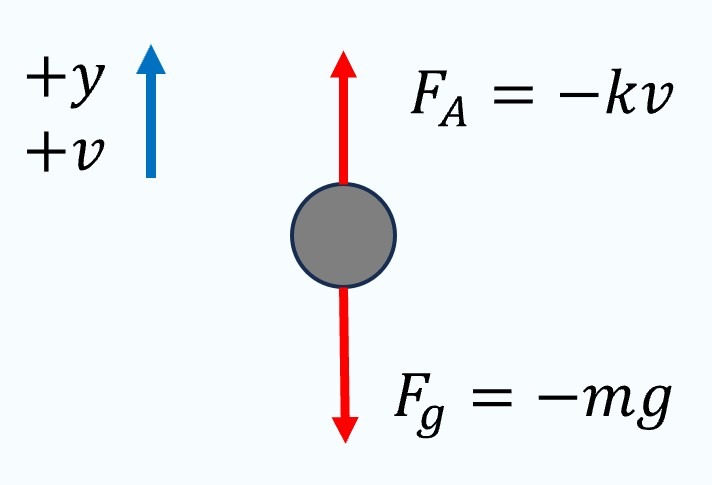
Les deux principales forces agissant sur l’objet sont la pesanteur et la résistance de l’air. La force de pesanteur agit toujours vers le bas, que nous considérons comme une valeur négative dans notre système de coordonnées, et est donnée par  .
.
D’autre part, la résistance de l’air agit dans la direction opposée au mouvement de l’objet, en produisant une force ascendante lorsque l’objet chute. Cette force est représentée par  . Le signe négatif dans garantit que la force de la résistance de l’air est toujours opposée au mouvement : elle est positive (ascendante) lorsque l’objet chute ( est négatif) et négative (descendante) lorsque l’objet se déplace vers le haut ( est positif).
. Le signe négatif dans garantit que la force de la résistance de l’air est toujours opposée au mouvement : elle est positive (ascendante) lorsque l’objet chute ( est négatif) et négative (descendante) lorsque l’objet se déplace vers le haut ( est positif).
En combinant ces forces, l’équation du mouvement est


Nous pouvons utiliser l’information selon laquelle l’ampleur de la résistance de l’air est de  lorsque la vitesse est
lorsque la vitesse est  pour trouver :
pour trouver :



En introduisant les valeurs avec la condition initiale =-29\ "m/s"") , on obtient le PVI
, on obtient le PVI
=-29")
b) Il s’agit d’une équation différentielle séparable (et linéaire). La solution générale de l’équation est
=1/2(Ce^(-2/5t)-49)")
En appliquant la condition initiale, on obtient
=1/2(-9e^(-2/5t)-49)")
c) La vitesse limite de chute est
 oo)v(t)=-49/2 \ « m/s » » title= »lim_(x->oo)v(t)=-49/2 \ « m/s » » class= »asciimath mathjax »>
oo)v(t)=-49/2 \ « m/s » » title= »lim_(x->oo)v(t)=-49/2 \ « m/s » » class= »asciimath mathjax »>
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=150
Les circuits électriques font partie intégrante des avancées technologiques et fonctionnent grâce à l’interaction de composants tels que des résistances, des inducteurs et des condensateurs. Dans cette section, nous abordons spécifiquement l’application des équations différentielles du premier ordre pour analyser les circuits électriques composés d’une source de tension avec soit une résistance et un inducteur (RL), soit une résistance et un condensateur (RC), comme illustré à la figure 2.5.1 Les circuits contenant à la fois un inducteur et un condensateur, connus sous le nom de circuits RLC, sont régis par des équations différentielles du second ordre, un sujet sur lequel nous reviendrons dans le chapitre suivant.
(a)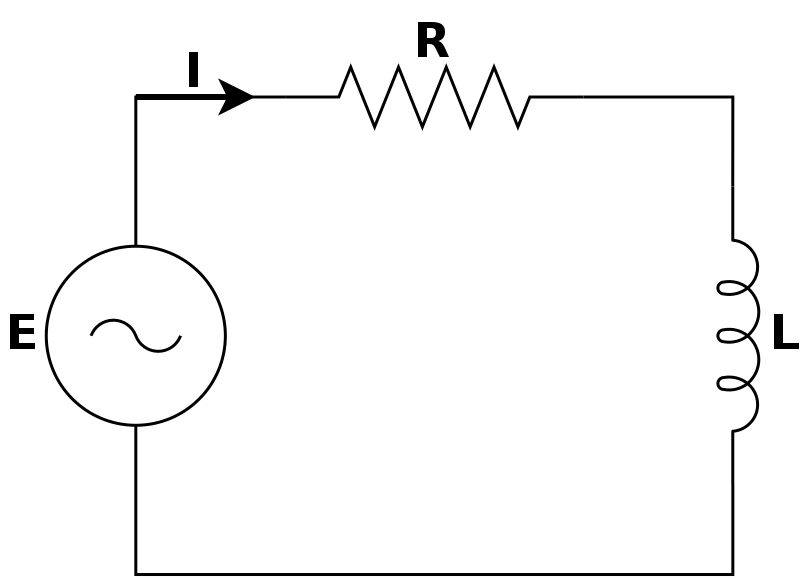 (b)
(b) 
Figure 2.5.1 (a) Circuit série RL et (b) Circuit série RC
Les lois de Kirchhoff – lois des nœuds et loi des mailles – constituent les principes fondamentaux régissant les circuits électriques. La loi des nœuds de Kirchhoff stipule que le courant total entrant en un point (nœud) doit être égal au courant total sortant, ce qui implique que la somme algébrique des courants dans un nœud est nulle. La loi des mailles Kirchhoff stipule que la somme algébrique de toutes les tensions autour d’une boucle fermée d’un circuit (maille) doit être égale à zéro.
La loi des nœuds de Kirchhoff implique que le même courant passe à travers tous les éléments des circuits de la figure 2.5.1. Pour appliquer la loi des mailles de Kirchhoff, il est essentiel de comprendre la baisse de tension à travers chaque composant :
a) Selon la loi d’Ohm, la baisse de tension  aux bornes d’une résistance est proportionnelle au courant I circulant entre ces bornes, ce qui s’exprime par
aux bornes d’une résistance est proportionnelle au courant I circulant entre ces bornes, ce qui s’exprime par  , où
, où  est la résistance.
est la résistance.
b) Selon la loi de Faraday, complétée par la loi de Lenz, la baisse de tension  aux bornes d’un inducteur est proportionnelle au taux de variation du courant, ce qui s’exprime par
aux bornes d’un inducteur est proportionnelle au taux de variation du courant, ce qui s’exprime par /(dt)") , où
, où  est l’inductance.
est l’inductance.
c) La baisse de tension  aux bornes d’un condensateur est proportionnelle à la charge électrique q qui y est stockée, ce qui est représenté par
aux bornes d’un condensateur est proportionnelle à la charge électrique q qui y est stockée, ce qui est représenté par  , étant la capacité.
, étant la capacité.
Dans cette section, nous dérivons le modèle mathématique d’un circuit RL tel qu’illustré à la figure 2.5.1, la dérivation du modèle pour un circuit RC étant réservée aux exercices. Considérons que ") est la source de tension du circuit RL. En appliquant la loi des mailles de Kirchhoff, nous avons
est la source de tension du circuit RL. En appliquant la loi des mailles de Kirchhoff, nous avons
")
")
où /dt") est la tension aux bornes de l’inducteur et est la tension aux bornes de la résistance. En substituant ces éléments dans l’équation, on obtient une équation différentielle linéaire du premier ordre
est la tension aux bornes de l’inducteur et est la tension aux bornes de la résistance. En substituant ces éléments dans l’équation, on obtient une équation différentielle linéaire du premier ordre
/dt+RI=E(t)")
ou, dans la forme standard
/dt+R/L I=(E(t))/L")
Pour résoudre cette équation différentielle linéaire, il faut utiliser un facteur intégrant
=e^(int R/L dt)=e^(Rt//L)")
la solution générale pour le courant ") est donc :
est donc :
Avec un spécifique et une condition initiale, telle que ") , on peut déterminer le courant I(t) avec l’équation ci-dessus. Une fois que est connu, la tension aux bornes de la résistance et de l’inducteur peut être déterminée.
, on peut déterminer le courant I(t) avec l’équation ci-dessus. Une fois que est connu, la tension aux bornes de la résistance et de l’inducteur peut être déterminée.
Prenons un circuit série RL avec une résistance de  et un inducteur de
et un inducteur de  , alimenté par une source de tension de
, alimenté par une source de tension de =sin(10t)\ V") . Au départ, le courant aux bornes de la résistance, , est de 0 A. Calcule ce qui suit : a) le courant dans le circuit en fonction du temps, b) la tension aux bornes de l’inducteur en fonction du temps et c) la tension aux bornes de la résistance en fonction du temps.
. Au départ, le courant aux bornes de la résistance, , est de 0 A. Calcule ce qui suit : a) le courant dans le circuit en fonction du temps, b) la tension aux bornes de l’inducteur en fonction du temps et c) la tension aux bornes de la résistance en fonction du temps.
Informations données :


=0 \ A")
a) Trouver le courant
L’équation différentielle pour un circuit série RL selon la loi des mailles de Kirchhoff est
En introduisant les valeurs données, on obtient
/dt+3I=sin(10t)")
Il s’agit d’une équation différentielle linéaire non homogène du premier ordre.
=e^(int 3/0,01 dt)=e^300t")
L’équation de la section 2.5.3 donne la solution de cette équation différentielle.
![I(t)=e^(-300t)[100int e^(300t) \ sin(10t) dt +C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c3eb18471d8917c7a4c4383be9526667-2.png "I(t)=e^(-300t)[100int e^(300t) \ sin(10t) dt +C]")
Le côté droit implique une intégrale avec des termes exponentiels et sinusoïdaux qui est généralement résolue en utilisant l’intégration par parties. Nous ne fournissons que la solution finale de l’intégrale, les étapes détaillées de l’intégration faisant l’objet d’un autre un exercice à explorer plus avant.
![I(t)=e^(-300t)[-10/901e^(300t)cos(10t)+300/901e^(300t)sin(10t)+C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e2b42a7bdcd88459a2f463df564dbf72-2.png "I(t)=e^(-300t)[-10/901e^(300t)cos(10t)+300/901e^(300t)sin(10t)+C]")
Ce qui peut être simplifié en
=-10/901cos(10t)+300/901sin(10t)+Ce^(-300t)")
En appliquant la condition initiale, on obtient
=0")
+300/901sin(0)+Ce^(0) =0")


Le courant est donc
=-10/901cos(10t)+300/901sin(10t)+10/901e^(-300t)")
b) Trouver la tension aux bornes de l’inducteur ")
Pour trouver la tension aux bornes de l’inducteur, il faut d’abord différencier .
/(dt)=100/901sin(10t)+3000/901cos(10t)-3000/901e^(-300t)")
La tension aux bornes de l’inducteur est donc
/dt")
![V_L(t)=0.01[100/901sin(10t)+3000/901cos(10t)-3000/901e^(-300t) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f675842c935345f068e4f9764e8e3140-2.png "V_L(t)=0.01[100/901sin(10t)+3000/901cos(10t)-3000/901e^(-300t) ]")
=1/901sin(10t)+30/901cos(10t)-30/901e^(-300t)")
c) Trouver la tension aux bornes de la résistance ")
De façon similaire, la tension aux bornes de la résistance est obtenue par

![V_R(t)=3[-10/901cos(10t)+300/901sin(10t)+10/901e^(-300t) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/08e66f064b10ed8d859f659eaf6b3f41-2.png "V_R(t)=3[-10/901cos(10t)+300/901sin(10t)+10/901e^(-300t) ]")
=-30/901cos(10t)+900/901sin(10t)+30/901e^(-300t)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=150
indique la quantité (kg) de sel à l’instant (min). a) Rédige une équation différentielle pour . b) Trouve la quantité de sel dans la cuve à l’instant . c) Détermine quand la concentration de sel dans la cuve atteindra 0,1 kg/L. Arrondis le résultat à la minute la plus proche. a) =2,2-11/2400Q(t)")
b) =480 -469 e^(-11/2400 t)")
c) 146 min
est la température, en degrés Celsius, à l’instant , en minutes. (a) Trouve la température du fluide pour  0″ title= »t > 0″ class= »asciimath mathjax »>. (b) Trouve la température du fluide quinze minutes après qu’il a été placé dehors. Arrondis votre résultat à deux décimales.
0″ title= »t > 0″ class= »asciimath mathjax »>. (b) Trouve la température du fluide quinze minutes après qu’il a été placé dehors. Arrondis votre résultat à deux décimales. a) =-30+165 (9/11)^t")
b) =-21,87^@C")
 a une vitesse descendante initiale de
a une vitesse descendante initiale de  . Supposons que l’atmosphère exerce une force de résistance proportionnelle à la vitesse. La résistance est de lorsque que la vitesse est de
. Supposons que l’atmosphère exerce une force de résistance proportionnelle à la vitesse. La résistance est de lorsque que la vitesse est de  . Utilise
. Utilise  . a) Rédige une équation différentielle en termes de vitesse et d’accélération
. a) Rédige une équation différentielle en termes de vitesse et d’accélération  . b) Trouve la vitesse de l’objet.
. b) Trouve la vitesse de l’objet. a) 
b)  = -64-5e^(-5/32*t)")
 et un inducteur de
et un inducteur de  est alimenté par une tension de
est alimenté par une tension de =e^(4 t) \ V") . Si la résistance initiale est
. Si la résistance initiale est =0 A") , trouve le courant
, trouve le courant  et la tension aux bornes de l’inducteur et de la résistance en termes de temps . Trouve le courant .
et la tension aux bornes de l’inducteur et de la résistance en termes de temps . Trouve le courant . =1/(7)(e^(4t)-e^(-3t))")
III
Ce chapitre traite des équations différentielles linéaires du second ordre, une catégorie d’équations fondamentale dans l’étude des mathématiques, de la physique et de l’ingénierie. Il explore leur structure et les techniques pour les résoudre et examine la façon dont elles modélisent des systèmes du monde réel, tels que des systèmes mécaniques vibratoires et des circuits électriques.
3.1. Équations homogènes : cette section étudie les équations différentielles linéaires homogènes du second ordre, pour lesquelles il n’y a pas de fonction de forçage externe. La solution générale consiste à trouver deux solutions linéairement indépendantes, qui constituent la base de toutes les solutions possibles.
3.2 Équations à coefficients constants : cette section s’intéresse aux équations homogènes à coefficients constants.
3.3. Équations non homogènes : cette section explore les équations non homogènes, qui modélisent des systèmes influencés par des forces ou intrants externes.
Le chapitre présente ensuite diverses méthodes de résolution d’équations à coefficients variables et de structures non homogènes.
3.4 Méthode des coefficients indéterminés : cette méthode est efficace pour les équations non homogènes à coefficients constants.
3.5 Méthode de variation des paramètres : technique polyvalente pour des cas plus généraux.
3.6 Méthode de réduction d’ordre : utile pour trouver une seconde solution lorsqu’une solution est déjà connue.
3.7 Équation de Cauchy-Euler : réservée aux équations à coefficients variables sous une forme particulière.
Le chapitre se conclut avec l’application de ces concepts à des scénarios physiques et techniques.
3.8 Systèmes mécaniques : cette section examine le comportement de systèmes masse-ressort, notamment les vibrations libres, forcées, amorties et non amorties.
3.9 Circuits électriques : cette section aborde l’analyse de circuits RLC, comportant une résistance, un inducteur et un condensateur.
Elbert Frank Cox, né en 1895 à Evansville, dans l’Indiana, aux États-Unis, occupe une place monumentale dans l’histoire puisqu’il a été le premier Afro-Américain à obtenir un doctorat en mathématiques. Surmontant les barrières raciales omniprésentes à son époque, Cox a pu obtenir un doctorat à l’université de Cornell en 1925 grâce à son inébranlable détermination. Sa thèse révolutionnaire, « The Polynomial Solutions of the Difference Equation » (Les Solutions polynomiales de l’équation différentielle), a jeté les bases d’avancées significatives dans le domaine des équations différentielles. Le parcours académique de Cox est non seulement une réussite personnelle, mais également une source d’inspiration, symbolisant un potentiel extraordinaire d’accomplissement en dépit d’obstacles systémiques. Après avoir obtenu son doctorat, il a consacré sa vie à l’éducation, enseignant dans des établissements supérieurs et universités historiquement noirs et façonnant la prochaine génération de mathématiciens. L’héritage d’Elbert Frank Cox va au-delà de ses contributions mathématiques : il témoigne de la résilience et du brio intellectuel face aux défis de la société, ouvrant la voie aux futurs chercheurs et chercheuses d’horizons divers.
8
Les équations différentielles linéaires du second ordre présentent cette forme :
Ici, est la fonction que nous recherchons et , et sont des fonctions connues. Dans le cas d’équations non homogènes, est ce que l’on appelle la fonction de forçage, représentant des forces ou influences externes. Commençons par le cas homogène, où =0") , nous explorerons le cas non homogène plus tard.
, nous explorerons le cas non homogène plus tard.
Théorème d’unicité des solutions. Si et sont continus sur un intervalle ouvert ") , alors le problème de valeur initiale a une solution unique dans cet intervalle.
, alors le problème de valeur initiale a une solution unique dans cet intervalle.
Théorème de combinaison linéaire. Supposons que ") et
et ") sont deux solutions de l’équation homogène 3.1.2 sur un intervalle ouvert . En ce cas, n’importe quelle combinaison linéaire
sont deux solutions de l’équation homogène 3.1.2 sur un intervalle ouvert . En ce cas, n’importe quelle combinaison linéaire  constitue également une solution sur le même intervalle.
constitue également une solution sur le même intervalle.
Toutes ces solutions, et
et  , forment un ensemble fondamental ou une base pour l’espace des solutions si elles sont linéairement indépendantes. Partant, n’importe quelle solution à l’équation 3.1.2 peut être exprimée comme une combinaison linéaire de et . Le wronskien, W, est crucial pour déterminer l’indépendance linéaire. Pour et , le wronskien en tout dans doit être non nul pour confirmer l’indépendance :
, forment un ensemble fondamental ou une base pour l’espace des solutions si elles sont linéairement indépendantes. Partant, n’importe quelle solution à l’équation 3.1.2 peut être exprimée comme une combinaison linéaire de et . Le wronskien, W, est crucial pour déterminer l’indépendance linéaire. Pour et , le wronskien en tout dans doit être non nul pour confirmer l’indépendance :
Théorème d’indépendance linéaire. Si et sont continus sur et si et sont des solutions, alors elles sont linéairement indépendantes sur si et uniquement si le wronskien W n’est nulle part égal à zéro sur .
Théorème d’Abel. Si et sont continus sur et si est n’importe quel point dans , alors le wronskien ") est donné par :
est donné par :
 = W(x_0)e^{\int_{x_0}^x p(t) dt}")
Le théorème d’Abel constitue un outil puissant pour analyser le comportement de solutions sur un intervalle, stipulant que si le wronskien n’est pas nul en un point et si est continu, alors le wronskien reste non nul dans tout l’intervalle.
Théorème d’équivalence : Lorsque et sont continus sur , et compte tenu de deux solutions et à l’équation 3.1.2, les solutions suivantes sont équivalentes :
est 
 est un ensemble fondamental de solutions de l’équation sur est linéairement indépendant sur n’est pas nul en un point dans n’est pas nul à tous les points dans
est un ensemble fondamental de solutions de l’équation sur est linéairement indépendant sur n’est pas nul en un point dans n’est pas nul à tous les points dans Grâce à ces théorèmes fondamentaux, nous disposons des outils nécessaires pour commencer à résoudre des équations différentielles linéaires homogènes du second ordre et nous préparer aux complexités des cas non homogènes.
Les deux solutions de l’équation différentielle  sont
sont ") et
et ") .
.
a) Trouver le wronskien des solutions et déterminer si elles sont linéairement indépendantes.
b) Trouver la solution générale de l’équation différentielle.
c) Trouver la solution satisfaisant les conditions initiales  = -5, \ y'(0) = -32") .
.
a) Pour trouver le wronskien, il faut utiliser l’équation 3.1.3. Il faut d’abord trouver les dérivées premières des solutions et .
 » title= »y_1=e^(6t) -> » class= »asciimath mathjax »>
» title= »y_1=e^(6t) -> » class= »asciimath mathjax »> ")
 » title= »y_2 = e^(5t)-> » class= »asciimath mathjax »>
» title= »y_2 = e^(5t)-> » class= »asciimath mathjax »> ")
 = |(y_1,y_2),(y_1',y_2')|")
= |(e^(6t),e^(5t) ),(6e^(6t),5e^(5t) ) |")
!=0") pour tout instant
pour tout instant
Le wronskien =-e^(11t)") n’est jamais égal à zéro quelle que soit la valeur de, ce qui signifie que les solutions sont linéairement indépendantes sur l’intervalle .
n’est jamais égal à zéro quelle que soit la valeur de, ce qui signifie que les solutions sont linéairement indépendantes sur l’intervalle .
b) Comme les solutions sont linéairement indépendantes, on peut exprimer la solution générale de l’équation différentielle comme une combinaison de ces solutions.
+c_2e^(5t)")
Ici,  et
et  sont des constantes qui seront déterminées en fonction des conditions initiales ou des exigences spécifiques du problème.
sont des constantes qui seront déterminées en fonction des conditions initiales ou des exigences spécifiques du problème.
c) Il faut appliquer les conditions initiales pour trouver les constantes et .
En appliquant la condition initiale à :
=-5")
+c_2e^(0)=-5")

En appliquant la condition initiale à  :
:
+5c_2e^(5t)")
 = -32")
+5c_2e^(0)=-32")

Pour déterminer et , il faut résoudre le système suivant de deux équations et deux inconnues :
,(6c_1+5c_2=-32 ):}")
La résolution du système donne


La solution du problème de valeur initiale est donc
+2e^(5t)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=167
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=167
") et
et ") . Détermine si les fonctions sont linéairement indépendantes pour tous les nombres réels.
. Détermine si les fonctions sont linéairement indépendantes pour tous les nombres réels. =2 e^(1/3x)") ; les fonctions sont linéairement indépendantes parce que
; les fonctions sont linéairement indépendantes parce que !=0") pour tous les nombres réels.
pour tous les nombres réels.
 sont
sont ") ,
, ") .
.  = 2, \ y'(0) = -11") .
. a) =3e^t")
b) =5 e^(-t)-3 e^(2t)")
 sont
sont sin(4t)") ,
, cos(4t)") .
.  = -5, \ y'(0) = 9") .
. a) =-4e^(-10t)")
b) =-4 e^(-5t)sin(4t)-5 e^(-5t)cos(4t)")
9
Considérons en premier lieu l’équation homogène à coefficients constants :
Pour résoudre cette équation, il; faut admettre que la solution doit avoir pour propriété que sa dérivée seconde peut être exprimée comme une combinaison linéaire de la dérivée première et de la fonction elle-même, ce qui suggère que la forme de la solution est ") . En remplaçant et ses dérivées dans l’équation 3.2.1, on obtient
. En remplaçant et ses dérivées dans l’équation 3.2.1, on obtient
(ar^2+br+c)=0")
Comme ") n’est jamais nul pour n’importe quel nombre réel , on peut conclure que
n’est jamais nul pour n’importe quel nombre réel , on peut conclure que
L’équation 3.2.2 est appelée l’équation auxiliaire ou l’équation caractéristique (polynôme caractéristique) de l’équation homogène 3.2.1. Pour déterminer la solution générale de l’équation 3.2.1, il faut trouver la valeur de dans l’équation caractéristique.
Les racines de l’équation caractéristique déterminent la nature de la solution, ce qui conduit à trois cas possibles selon que les racines sont réelles et distinctes, réelles et répétées ou complexes conjuguées.
Solution générale de l’équation différentielle linéaire du second ordre à coefficients constants
Cas n° 1 : deux racines réelles distinctes
Si l’équation caractéristique (équation 3.2.2) a deux racines réelles  et
et  , alors les solutions sont
, alors les solutions sont ") et
et ") . La solution générale est la combinaison linéaire de ces deux solutions :
. La solution générale est la combinaison linéaire de ces deux solutions :
 + c_2 e^(r_2 x)")
Cas n° 2 : racine répétée
Si l’équation caractéristique a une racine répétée , alors les solutions sont ") et
et ") . La solution générale est la combinaison linéaire de ces deux solutions :
. La solution générale est la combinaison linéaire de ces deux solutions :
 + c_2 xe^(r x)")
Cas n° 3 : racines complexes conjuguées
Si l’équation caractéristique a des racines complexes conjuguées sous la forme  , alors les solutions peuvent être représentées par la formule d’Euler sous la forme
, alors les solutions peuvent être représentées par la formule d’Euler sous la forme (cos(betax)+-i sin (betax))") . La solution générale à valeur réelle dérivée de ces solutions complexes est
. La solution générale à valeur réelle dérivée de ces solutions complexes est
(c_1cos(betax)+c_2sin (betax))")
Sous cette forme, ") représente la croissance ou la décroissance exponentielle, tandis que la combinaison de cosinus et de sinus représente le comportement oscillatoire dû à la partie complexe des racines.
représente la croissance ou la décroissance exponentielle, tandis que la combinaison de cosinus et de sinus représente le comportement oscillatoire dû à la partie complexe des racines.
Trouver la solution générale de l’équation différentielle

L’équation auxiliaire est

L’équation peut être factorisée en
(r-2)=0")
Les racines sont  et
et  . C’est le cas n° 1 car les racines sont réelles et distinctes. Partant, la solution générale est la combinaison linéaire de
. C’est le cas n° 1 car les racines sont réelles et distinctes. Partant, la solution générale est la combinaison linéaire de ") et
et ") :
:
=c_1e^(-3x)+c_2e^(2x)")
Résoudre le problème de valeur initiale (PVI) suivant.

 = 9, \quad y'(0) = 35")
Trouver la solution générale :
L’équation auxiliaire est

L’équation peut être factorisée en
(r-3)=0")
Les racines sont  et
et  . C’est le cas n° 1 car les racines sont réelles et distinctes. Partant, la solution générale est la combinaison linéaire de
. C’est le cas n° 1 car les racines sont réelles et distinctes. Partant, la solution générale est la combinaison linéaire de ") et
et ") :
:
=c_1e^(5x)+c_2e^(3x)")
Appliquer les conditions initiales :
Appliquer la condition initiale à :
=9")
+c_2e^(0)=9")

Appliquer la condition initiale à :
+3c_2e^(3x)")
 = 35")
+3c_2e^(0)=35")

Pour déterminer et , il faut résoudre le système suivant de deux équations et deux inconnues :
,(5c_1+3c_2=35 ):}")
La résolution du système donne


La solution du problème de valeur initiale est donc
=4e^(5x)+5e^(3x)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=169
Trouver la solution générale de l’équation différentielle

L’équation auxiliaire est

L’équation peut être factorisée en
^2=0")
L’équation a une racine répétée  . Il s’agit du cas n° 2, la racine répétée. Partant, la solution générale est la combinaison linéaire de
. Il s’agit du cas n° 2, la racine répétée. Partant, la solution générale est la combinaison linéaire de ") et
et ") :
:
=c_1e^(4x)+c_2xe^(4x)")
Résoudre le problème de valeur initiale (PVI) suivant.

 = 4, \quad y'(0) = -25")
Trouver la solution générale :
L’équation auxiliaire est

L’équation peut être factorisée en
^2=0")
L’équation a une racine répétée  . Il s’agit du cas n° 2, la racine répétée. Partant, la solution générale est la combinaison linéaire de
. Il s’agit du cas n° 2, la racine répétée. Partant, la solution générale est la combinaison linéaire de ") et
et ") :
:
=c_1e^(-5x)+c_2xe^(-5x)")
Appliquer les conditions initiales :
Appliquer la condition initiale à :
+c_2(0)e^(0)=4")

Appliquer la condition initiale à :
+c_2(e^(-5x)-5xe^(-5x))")
 = -25")
+c_2(e^(0)-0)=-25")

En introduisant cela dans , on obtient  .
.
La solution du problème de valeur initiale est donc
=4e^(-5x)-5xe^(-5x)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=169
Trouver la solution générale de l’équation différentielle

L’équation auxiliaire est

Avec la formule quadratique, on obtient
)/2=")
)/2=2+-3i")
L’équation a des racines complexes conjuguées avec une partie réelle  et une partie imaginaire
et une partie imaginaire  . Il s’agit du cas n° 3, la solution générale est donc
. Il s’agit du cas n° 3, la solution générale est donc
=e^(2x)(c_1 cos(3x)+c_2 sin(3x))")
Résoudre le problème de valeur initiale (PVI) suivant.

 = -3, \quad y'(0) = -7")
Trouver la solution générale :
L’équation auxiliaire est

Il est possible de trouver les racines sans faire usage de la formule quadratique vue dans l’exemple précédent, mais par la complétion du carré. Pour varier les plaisirs, nous allons cette fois utiliser la complétion du carré.


^2=-25")


L’équation a des racines complexes conjuguées avec une partie réelle  et une partie imaginaire
et une partie imaginaire  . Il s’agit du cas n° 3, la solution générale est donc
. Il s’agit du cas n° 3, la solution générale est donc
=e^(-x)(c_1 cos(5x)+c_2 sin(5x))")
Appliquer les conditions initiales :
Appliquer la condition initiale à :
=-3")
(c_1 cos(0)+c_2 sin(0))=-3")

Appliquer la condition initiale à :
=-e^(-x)(c_1 cos(5x)+c_2 sin(5x))+")
(-5c_1 sin(5x)+5c_2 cos(5x))")
 = -7")

En introduisant cela dans , on obtient  .
.
La solution du problème de valeur initiale est donc
=e^(-x)(-3 cos(5x)-2 sin(5x))")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=169

 = 4, \quad y'(0) = -8.5")
=e^(-4x)+3 e^(-1.5x)")

 = -1, \quad y'(0) = 8")
=-e^(-2x)+6xe^(-2x)")

 = 4, \quad y'(0) = -18")
=e^(-5x)(4cos(x)+2sin(x))")
10
Dans cette section, nous explorons les équations différentielles linéaires non homogènes du second ordre de la forme :
Théorème d’unicité des solutions. Si et sont continus sur un intervalle ouvert et si est dans l’intervalle, alors le problème de valeur initiale a une solution unique dans ") .
.
Pour résoudre l’équation 3.3.1, il faut d’abord trouver les solutions de l’équation homogène associée
L’équation 3.3.2 est l’équation complémentaire à l’équation 3.3.1.
Théorème des solutions générales.  est une solution particulière de l’équation non homogène 3.3.1 et
est une solution particulière de l’équation non homogène 3.3.1 et  est un ensemble fondamental de solutions à l’équation complémentaire 3.3.2. La solution générale de l’équation non homogène est donc
est un ensemble fondamental de solutions à l’équation complémentaire 3.3.2. La solution générale de l’équation non homogène est donc
Ici,  représente la solution de l’équation complémentaire associée, communément exprimée
représente la solution de l’équation complémentaire associée, communément exprimée  . L’équation 3.3.3 est donc souvent exprimée comme suit :
. L’équation 3.3.3 est donc souvent exprimée comme suit :

Le principe de superposition est un outil puissant qui permet de simplifier la résolution d’équations non homogènes. Il consiste à diviser la fonction de forçage en composantes plus simples, à trouver une solution particulière pour chaque composante, puis à additionner ces solutions pour obtenir une solution complète à l’équation d’origine.
Théorème. Si ") est une solution particulière de l’équation différentielle
est une solution particulière de l’équation différentielle
yprime+q(x)y=f_1(x)")
et si ") est une solution particulière de l’équation différentielle
est une solution particulière de l’équation différentielle
yprime+q(x)y=f_2(x)")
alors, pour n’importe quelle constante  et
et  ,
, +k_2y_(p2)") est une solution particulière de l’équation différentielle
est une solution particulière de l’équation différentielle
yprime+q(x)y=k_1f_1(x)+k_2f_2(x)")
Étant donné que =3x/2-9/4") est une solution particulière de
est une solution particulière de  (i) et
(i) et =e^(3x)/2") est une solution particulière de
est une solution particulière de ") (ii), trouver une solution particulière de
(ii), trouver une solution particulière de ") (iii).
(iii).
=3x")
=10e^(3x)")
=12x-20e^(3x)")
Si l’on regarde le côté droit des équations, on remarque que =4f_1(x)-2f_2(x)") . Par conséquent, la même combinaison linéaire de et donne une solution particulière pour l’équation (iii) :
. Par conséquent, la même combinaison linéaire de et donne une solution particulière pour l’équation (iii) :
=4y_(p1)-2y_(p2)")
/2-9/4)-2(e^(3x)/2)")
")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=172
=1/3 e^(-5 x)") est une solution particulière de
est une solution particulière de ") et que
et que  = -5/8x+15/32") est une solution particulière de
est une solution particulière de  , utilise la méthode de la superposition pour trouver une solution particulière à
, utilise la méthode de la superposition pour trouver une solution particulière à +10x")
+5/4x-15/16")
=-2/15 e^(3x)") est une solution particulière de
est une solution particulière de ") et que
et que  = 1/20sin(2x)-1/40cos(2x)") est une solution particulière de
est une solution particulière de ") , utilise la méthode de la superposition pour trouver une solution particulière à
, utilise la méthode de la superposition pour trouver une solution particulière à +4sin(2x)")
-1/5sin(2x)+1/10cos(2x)")
11
La méthode des coefficients indéterminés est une technique permettant de trouver des solutions particulières, à des équations différentielles linéaires non homogènes à coefficients constants
")
Pour appliquer cette méthode, il faut d’abord identifier la forme de la fonction de forçage , puis faire une supposition raisonnée de  avec des coefficients indéterminés. Cette supposition est ensuite remplacée dans l’équation pour trouver la valeur de ces coefficients. Cette méthode est utile lorsque la fonction de forçage, , est une fonction relativement simple, comme un polynôme, une exponentielle, un sinus ou un cosinus, ou une combinaison de ces fonctions.
avec des coefficients indéterminés. Cette supposition est ensuite remplacée dans l’équation pour trouver la valeur de ces coefficients. Cette méthode est utile lorsque la fonction de forçage, , est une fonction relativement simple, comme un polynôme, une exponentielle, un sinus ou un cosinus, ou une combinaison de ces fonctions.
Fonctions de forçage polynomiales : Pour  , nous ne connaissons pas de solution particulière. Mais, en regardant , on se demande quel type de fonction laisserait un polynôme. Supposons
, nous ne connaissons pas de solution particulière. Mais, en regardant , on se demande quel type de fonction laisserait un polynôme. Supposons  et trouvons la valeur de
et trouvons la valeur de  .
.
Fonctions de forçage exponentielles : Pour ") , nous supposons
, nous supposons ") . Si était
. Si était ") , il faudrait multiplier notre supposition par :
, il faudrait multiplier notre supposition par : ") .
.
Ajuster la supposition en fonction des solutions d’équations complémentaires : Si l’équation complémentaire a une solution correspondant partiellement à , il faut ajuster la supposition en conséquence. Par exemple, si = (3x-2)e^(4x)") , il faut commencer par
, il faut commencer par e^(4x)") . Si est une solution à l’équation non homogène, il faut utiliser
. Si est une solution à l’équation non homogène, il faut utiliser xe^(4x)") . Pour une racine répétée, utiliser
. Pour une racine répétée, utiliser x^2e^(4x)") .
.
Remarque : nous transcrivons  avec un « Y » majuscule pour indiquer qu’il s’agit de notre supposition initiale pour la solution particulière. En revanche, avec un « y » minuscule indique la solution particulière après détermination des coefficients.
avec un « Y » majuscule pour indiquer qu’il s’agit de notre supposition initiale pour la solution particulière. En revanche, avec un « y » minuscule indique la solution particulière après détermination des coefficients.
Trouver la solution générale de l’équation suivante.
/(dx^2) + 10(dy)/(dx) +25y = 3e^(-2 x)")
Trouver la solution complémentaire :
Bien qu’il ne soit pas nécessaire de connaître la solution complémentaire pour trouver la solution particulière, il est utile de la connaître. Comprendre la solution complémentaire permet de faire de meilleures suppositions initiales pour la solution particulière et de les ajuster en conséquence avant de procéder à l’algèbre nécessaire pour déterminer les coefficients indéterminés.
L’équation auxiliaire associée à l’équation complémentaire est , qui a une racine répétée . Ainsi, ,xe^(-5x)}") est un ensemble fondamental de solutions de l’équation complémentaire.
est un ensemble fondamental de solutions de l’équation complémentaire.
Supposer la forme de la solution particulière :
Étant donné que est une fonction exponentielle et que les fonctions exponentielles ne changent jamais d’exposant ou ne disparaissent jamais par différenciation, nous supposons que la solution particulière aura une forme similaire à la composante exponentielle dans . De même, l’exposant dans diffère de l’exposant dans la solution complémentaire, de sorte qu’aucun ajustement n’est nécessaire.
")
Introduire la supposition dans l’équation pour trouver A :
Il faut ensuite introduire la supposition et ses dérivées dans l’équation différentielle afin de déterminer le coefficient indéterminé A.
, ") ,
, ")
 - 20Ae^(-2x) +25Ae^(-2x) = 3e^(-2 x)")
e^(-2x)=3e^(-2x)")
=3e^(-2x)")


La solution particulière de l’équation différentielle est donc
")
Trouver la solution générale :
La solution générale d’une équation non homogène est
 .
.
où et sont les solutions de l’équation complémentaire et est la solution particulière de l’équation non homogène.
+c_1e^(-5x)+c_2xe^(-5x)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=174
Trouver la solution générale de l’équation suivante.
/(dx^2) + 10(dy)/(dx) +25y = e^(-5 x)")
Trouver la solution complémentaire :
L’équation complémentaire est similaire à celle de l’exemple 3.4.2. Ainsi, est un ensemble fondamental de solutions de l’équation complémentaire et la solution complémentaire est +c_2xe^(-5x)") .
.
Supposer la forme de la solution particulière :
Notre supposition initiale est ") . Cependant, comme est aussi la solution complémentaire, il faut ajuster notre supposition. Étant donné que est une racine répétée, nous multiplions notre suppositions originale par
. Cependant, comme est aussi la solution complémentaire, il faut ajuster notre supposition. Étant donné que est une racine répétée, nous multiplions notre suppositions originale par  .
.
")
Introduire la supposition dans l’équation pour trouver A :
Il faut ensuite introduire la supposition et ses dérivées dans l’équation différentielle afin de déterminer le coefficient indéterminé A.
,
 (2x-5x^2)") ,
,
(2x-5x^2)+Ae^(-5x)(2-10x)")
(25x^2-20x+2)")
(25x^2-20x+2)+")
 (2x-5x^2)+")
=e^(-5x)")
En factorisant le terme exponentiel et en rassemblant les termes semblables, on obtient
(25x^2-20x+2+20x-50x^2+25x^2)=e^(-5x)")
(2)=e^(-5x)")


La solution particulière de l’équation différentielle est donc
")
Trouver la solution générale :
La solution générale est
+c_1e^(-5x)+c_2xe^(-5x)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=174
Résoudre le problème de valeur initiale suivant.
/(dx^2) + 10(dy)/(dx) +25y = e^(-5 x),")
=2,\ y'(0)=-3")
Trouver la solution générale :
L’équation est similaire à celle de l’exemple 3.4.3. La solution générale est donc
Appliquer les conditions initiales :
Appliquer la condition initiale à :
=2")

Appliquer la condition initiale à :
-5/2x^2e^(-5x)-5c_1e^(-5x)+c_2(e^(-5x)-5xe^(-5x))")
=-3")
=-3")

En introduisant cela dans , on obtient  .
.
La solution du problème de valeur initiale est donc
+2e^(-5x)+7xe^(-5x)")
Remarque : les conditions initiales doivent satisfaire la solution tout entière de l’équation non homogène, et non pas seulement la partie complémentaire. Il faut donc appliquer les conditions initiales directement à la solution générale de l’équation non homogène donnée pour déterminer les constantes.
La section suivante synthétise les formes appropriées de supposition pour différents types de fonctions de forçage et explique comment modifier ces suppositions si une partie quelconque de la fonction de forçage correspond à des solutions de l’équation complémentaire.
)Trouver une solution particulière à l’équation différentielle
")
| | Supposition |
") degré polynomial degré polynomial | x^(n-1)+...+A_1x+A_0") |
") | ") |
") | +Bsin(betax)") |
") | |
+bsin(betax)") | |
Remarques
1. Produits exponentiels et polynomiaux : Si ne contient que des fonctions exponentielles ou des produits de fonction exponentielle et des polynômes et si est aussi la solution de l’équation complémentaire associée, il faut alors multiplier la partie exponentielle de par pour une racine simple pour une racine répétée.
2. Racines complexes : Si a trait à la racine complexe d’une équation complémentaire, c’est-à-dire si  est une racine complexe de l’équation auxiliaire associée, il faut alors multiplier la supposition par .
est une racine complexe de l’équation auxiliaire associée, il faut alors multiplier la supposition par .
3. Produits exponentiels et trigonométriques/polynomiaux : Si comprend des produits d’une fonction exponentielle et une fonction polynomiale ou trigonométrique, il ne faut retenir que la partie polynomiale ou trigonométrique de la supposition initiale, puis multiplier par la partie exponentielle de .
4. Produits polynomiaux et trigonométriques : Si comprend des produits de fonctions polynomiales et trigonométriques, il faut d’abord noter la supposition pour la fonction polynomiale uniquement, puis multiplier par le cosinus approprié, puis ajouter une autre fonction polynomiale supposée avec différents coefficients et multiplier par le sinus approprié.
Trouver la forme d’une solution particulière à
")
où est
a) ") b)
b) ") c)
c)  cos(8x)") d)
d) ") e)
e) e^(2x)")
L’équation auxiliaire associée à l’équation est  , qui a pour racines et .
, qui a pour racines et .
a) +Bsin(4x)")
b) Cette fonction comprend le produit de fonctions polynomiales (second degré) et trigonométriques. Suivant la remarque 4, il faut d’abord supposer le polynôme et le multiplier par le bon cosinus, puis l’ajouter au produit d’un autre polynôme supposé avec différents coefficients et un sinus.
cos(pix)+(B_2x^2+B_1x+B_0)sin(pix)")
b) Cette fonction comprend le produit de fonctions exponentielles, polynomiales (premier degré) et trigonométriques. Suivant les remarques 3 et 4, il faut d’abord supposer le polynôme et le multiplier par le bon cosinus, puis l’ajouter au produit d’un autre polynôme supposé avec différents coefficients et un sinus. Enfin, il faut multiplier la partie exponentielle
((A_1x+A_0)cos(8x)+(B_1x+B_0)sin(8x))")
d) Étant donné que  est la racine de l’équation auxiliaire et donc que
est la racine de l’équation auxiliaire et donc que ") est une solution de l’ensemble fondamental,
est une solution de l’ensemble fondamental, ") n’est pas une supposition correcte. Suivant la remarque 1, il faut le multiplier par . Par conséquent,
n’est pas une supposition correcte. Suivant la remarque 1, il faut le multiplier par . Par conséquent,
")
b) Cette fonction comprend le produit de fonctions exponentielles et polynomiales (second degré). Suivant la remarque 3, il faut d’abord supposer le polynôme et multiplier la partie exponentielle. La supposition polynomiale sera  . La partie exponentielle
. La partie exponentielle ") doit être multipliée par car est dans l’ensemble fondamental de solutions (remarque 1). Par conséquent,
doit être multipliée par car est dans l’ensemble fondamental de solutions (remarque 1). Par conséquent,
(A_2x^2+A_1x+A_0)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=174
")
")
/(dt^2) + 2(dy)/(dt) + 17y = 5e^(-4 t)")
=c_1e^(- t)cos(4t)+c_2 e^(- t)sin(4t)+ 1/5e^(-4t)")
")
-1/75cos(10x)")
,\ \ y(0) = 1,\ y'(0) = -17")
=3 e^(-2x)-2 e^(5x)-xe^(-2x)")

 = 4,\ y'(0) = 1")
=-3e^(-3t)-3e^(2t)-2t+10")
12
La méthode de variation des paramètres est une autre technique permettant de trouver des solutions particulières à des équations différentielles linéaires non homogènes. Elle est particulièrement utile pour les équations à coefficients constants et variables et s’applique lorsque la fonction de forçage, , rend la méthode des coefficients indéterminés impraticable. Cette technique s’applique également aux équations d’ordre supérieur.
Contrairement à la méthode des coefficients indéterminés, où la solution complémentaire permet de deviner la forme de la solution particulière, la variation des paramètres a besoin de la solution complémentaire pour déterminer la solution particulière.
Nous nous concentrons d’abord sur l’application de la méthode de variation des paramètres aux équations non homogènes à coefficients constants. Considérons l’équation linéaire non homogène du second ordre
Soit un ensemble fondamental de solutions à l’équation complémentaire (homogène) associée. La solution générale de l’équation complémentaire est . Pour trouver une solution particulière, , grâce à la méthode de variation des paramètres, on remplace les constantes et par les fonctions ") et
et ") , respectivement, soit
, respectivement, soit

Le but est de remplacer et ses dérivées dans l’équation 3.5.1 afin de déterminer des fonctions  et
et  . La dérivée première de est
. La dérivée première de est

Comme nous avons plus de paramètres que d’équations, on décide que  (i) pour simplifier les calculs. Par conséquent,
(i) pour simplifier les calculs. Par conséquent,  est simplifié comme suit :
est simplifié comme suit :

Il faut ensuite trouver  .
.

Après avoir remplacé et ses dérivées dans l’équation 3.5.1 et rassemblé les termes, on obtient
)_(=0) + u_2 underbrace((ay_2''+by_2'+cy_2 ))_(=0) +")
 = f(x)")
Les expressions multipliées par et sont nulles, puisque et sont des solutions de l’équation complémentaire, d’où
)/a") (ii).
(ii).
En combinant (i) et (ii), on obtient un système d’équations
,(u_1'y_1'+ u_2'y_2' = (f(x))/a ):}")
En résolvant le système pour  et
et  , puis en les intégrant, on obtient les solutions pour et .
, puis en les intégrant, on obtient les solutions pour et .
 y_2)/(a(y_1 y_2'- y_1' y_2))") et
et  y_1)/(a(y_1 y_2' - y_1' y_2))")
Notez que le terme entre parenthèses est le dénominateur dans le wronskien ( ). Par conséquent, et peuvent également s’écrire sous la forme
). Par conséquent, et peuvent également s’écrire sous la forme
 y_2)/(a W(y_1,y_2))") et
et  y_1)/(a W(y_1,y_2))")
Pour trouver une solution particulière à l’équation 3.5.1,
1. Trouver une solution à l’équation homogène : déterminer un ensemble fondamental de solutions à l’équation homogène correspondante et trouver le wronskien des solutions.
2. Déterminer et : calculer et en utilisant le système dérivé de la variation des paramètres. Les intégrer ensuite pour trouver et , en prenant une constante d’intégration de zéro :
 y_2)/(a W(y_1,y_2)) dx") et
et  y_1)/(a W(y_1,y_2)) dx")
3. Élaborer la solution particulière : combiner , , , et pour former la solution particulière :
Trouver une solution particulière à
arctan(x)")
Pour trouver une solution particulière avec la méthode de variation des paramètres, il faut d’abord trouver une solution à l’équation homogène associée.
1. La caractéristique polynomiale de l’équation complémentaire  est
est

^2=0")
La solution est donc une racine répétée . Partant, et ") forment un ensemble fondamental de solutions.
forment un ensemble fondamental de solutions.
Le wronskien de l’ensemble fondamental est
 = |(y_1,y_2),(y_1',y_2')|")
= |(e^(-3x),xe^(-3x) ),(-3e^(-3x),e^(-3x)(1-3x )) |")
(1-3x)+3xe^(-6x)")
")
2. Ensuite, il faut remplacer , , =e^(-3x)arctan(x)") et
et =e^(-6x)") dans des formules pour et afin de les déterminer.
dans des formules pour et afin de les déterminer.
Trouver :
arctan(x) (xe^(-3x)))/(e^(-6x)) dx")
 dx")
Cette intégrale peut être évaluée au moyen de la technique d’intégration par parties.
+1/2int(x^2)/(1+x^2)dx")
 +1/2(x-arctan(x))+C")
Trouver :
arctan(x) (e^(-3x)))/(e^(-6x)) dx")
 dx")
Cette intégrale peut être évaluée au moyen de la technique d’intégration par parties.
-intx/(1+x^2)dx")
 -1/2ln(1+x^2)+C")
Comme il ne nous faut qu’une solution particulière, nous définissions une constante nulle pour les intégrations dans et par souci de simplicité.
3. Il faut maintenant remplacer et par dans l’expression de pour obtenir une solution particulière :
 +1/2(x-arctan(x)) )e^(-3x)+")
 -1/2ln(1+x^2))xe^(-3x)")
(x^2arctan(x)+x-arctan(x)-xln(1+x^2))")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=176
Trouver (a) une solution particulière, puis (b) une solution générale à
")
a) Pour trouver une solution générale, il faut d’abord trouver une solution particulière. Pour trouver une solution particulière avec la méthode de variation des paramètres, il faut d’abord trouver un ensemble fondamental de solutions à l’équation homogène associée :
1. La caractéristique polynomiale de l’équation complémentaire  est
est

(r+2)=0")
Les solutions sont donc  et
et  et
et ") et
et ") constituent un ensemble fondamental de solutions.
constituent un ensemble fondamental de solutions.
2. Il faut ensuite trouver et en remplaçant , , =1/(e^x+1)") et
et =-e^(-3x)") dans
dans
 e^(-2x))/(-e^(-3x)) dx")
 dx")
+C")
et
 e^(-x))/(-e^(-3x)) dx")
/(1+e^x) dx")
-e^x+C")
Comme nous n’avons besoin que d’une seule solution particulière, nous définissons les deux constantes sur zéro à des fins de simplicité.
3. Il faut maintenant remplacer et par dans l’expression de pour obtenir une solution particulière :
e^(-x)+(ln(1+e^x)-e^x )e^(-2x)")
+e^(-2x))ln(1+e^x)-e^(-x)")
b) Pour trouver une solution générale, il faut ajouter la solution générale à l’équation homogène et à une solution particulière :
=c_1y_1+c_2y_2+y_p")
+c_2e^(-2x)+")
+e^(-2x))ln(1+e^x)-e^(-x)")
On remarque que les termes ") et
et ") sont analogues et peuvent être combinés en
sont analogues et peuvent être combinés en e^(-x)") . Puisque
. Puisque  , on obtient
, on obtient
=c_3e^(-x)+c_2e^(-2x)")
+e^(-2x))ln(1+e^x)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=176
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=176
Maintenant que nous savons résoudre des équations différentielles homogènes et non homogènes du second ordre à coefficients constants, passons aux équations dont les coefficients sont des fonctions de la variable indépendante. La méthode de variation des paramètres convient tout à fait à ces équations.
Pour une équation différentielle de la forme
y''+a_1(x)y'+a_0(x)y=g(x)")
des solutions sont attendues sur un intervalle ouvert où les quatre fonctions directrices, , \ a_1(x),\ a_0(x)") et , sont continues et où
et , sont continues et où ") n’est pas nul. En standardisant l’équation en la divisant par , on obtient
n’est pas nul. En standardisant l’équation en la divisant par , on obtient
y'+q(x)y=f(x)")
Théorème d’existence et d’unicité des solutions : si , et sont continus sur un intervalle contenant un point , pour n’importe quelles valeurs initiales  et
et  , il existe une solution unique
, il existe une solution unique ") sur le même intervalle que le problème de valeur initiale.
sur le même intervalle que le problème de valeur initiale.
y'+q(x)y=f(x),")
=Y_0, \ y'(x_o)=Y_1")
Les étapes méthodologiques pour les équations à coefficients variables sont identiques à celles des équations à coefficients constants, à ceci près que l’équation doit être sous forme standard.
Méthode de variation des paramètres pour des équations à coefficients variables
1. Standardiser l’équation : diviser l’équation par le coefficient de pour que le coefficient soit égal à un. L’équation doit présenter le format suivant :
2. Solutions indépendantes linéaires : trouver deux solutions indépendantes linéaires, à l’équation homogène correspondante. trouver le wronskien des solutions.
3. Déterminer et : calculer  et
et  en utilisant le système dérivé de la variation des paramètres. Les intégrer ensuite pour trouver et , en prenant une constante d’intégration de zéro :
en utilisant le système dérivé de la variation des paramètres. Les intégrer ensuite pour trouver et , en prenant une constante d’intégration de zéro :
 y_2)/(W(y_1,y_2)) dx") et
et  y_1)/(W(y_1,y_2)) dx")
4. Élaborer la solution particulière : combiner , , , et pour former la solution particulière :
Trouver une solution particulière à l’équation différentielle suivante, sachant que  = x^2") et
et  = x^-1") satisfont l’équation homogène correspondante.
satisfont l’équation homogène correspondante.
")
1. Diviser d’abord l’équation par le coefficient de pour lui donner une forme standard.
, \ \(xgt0)")
2. Pour trouver une solution particulière avec la méthode de variation des paramètres, il faut un ensemble fondamental de solutions à l’équation homogène associée. Les solutions données et formeront l’ensemble fondamental si leur wronskien n’est pas nul sur un intervalle ouvert.
Le wronskien de l’ensemble de solutions est
= |(x^2,x^-1 ),(2x,-x^-2) |")

Le wronskien n’est jamais nul. Partant, l’ensemble de solutions est l’ensemble fondamental de solutions.
3. Il faut ensuite remplacer  ,
,  ,
, =x^-1(1+3x^2)") et
et =-3") dans des formules pour et afin de les déterminer.
dans des formules pour et afin de les déterminer.
Trouver :
 y_2)/( W(y_1,y_2)) dx")
 x^-1)/-3 dx")
 dx")
+C")
Avec  , on obtient
, on obtient

Trouver :
 x^2)/-3 dx")
 dx")
+C")
Avec , on obtient

4. Remplacer et par dans l’expression de de façon à obtenir une solution particulière :
x^2+(-1/6x^2-1/4x^4 )x^-1")

Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=176
. moins typique ou pour des équations à coefficients variables. lnx")
=2x^2 e^(4x)ln(x)-3x^2 e^(4x)")
")
=cos(x)ln|cos(x)|+xsin(x)")
et satisfont l’équation homogène correspondante. ")
=-3/2x-1/5x^4")
13
La méthode de réduction d’ordre est une technique permettant de trouver une deuxième solution à une équation différentielle linéaire du second ordre lorsqu’une solution est déjà connue. Elle est utile aussi bien pour les équations homogènes que pour les solutions non homogènes.
En général, pour appliquer la méthode de réduction d’ordre pour l’équation non homogène
on suppose que la deuxième solution prend la forme  , où
, où  est une fonction de la variable indépendante. En remplaçant et ses dérivées dans l’équation et en simplifiant, on obtient une équation du premier ordre en termes de
est une fonction de la variable indépendante. En remplaçant et ses dérivées dans l’équation et en simplifiant, on obtient une équation du premier ordre en termes de  :
:
u'' + q_1(x)u' = f(x)")
Il est alors possible de résoudre cette équation différentielle du premier ordre à l’aide de techniques standard, de l’intégrer pour trouver , puis de déterminer .
En partant d’une équation homogène avec une solution connue , trouver une deuxième solution linéairement indépendante en procédant comme suit :
1. Standardiser l’équation : diviser l’équation par le coefficient de pour que le coefficient soit égal à un. L’équation doit présenter le format suivant :
y'+q(x)y=0")
2. Déterminer ") : identifier la fonction , le coefficient de et évaluer l’intégrale :
: identifier la fonction , le coefficient de et évaluer l’intégrale :
=e^(-int p(x)dx)")
3. Trouver la deuxième solution : évaluer l’intégrale suivante pour trouver la deuxième solution : Pour plus de simplicité, disons que la constante d’intégration est nulle.
)/((y_1)^2) \ dx")
4. Formuler la solution générale : la solution générale est la combinaison linéaire des deux solutions :
=c_1y_1+c_2y_2")
Il convient de noter que la constante peut absorber n’importe quel coefficient numérique de 
Sachant que  = e^(2 x)") est une solution à l’équation donnée, utilise la méthode de réduction d’ordre pour trouver une deuxième solution.
est une solution à l’équation donnée, utilise la méthode de réduction d’ordre pour trouver une deuxième solution.
y'+(4x+8)y = 0, \quad x gt 0")
1. Tout d’abord, standardiser l’équation en la divisant par le coefficient de :
/xy'+(4x+8)/xy = 0")
2. Identifier , le coefficient de la fonction de , puis trouver .
 » title= »p(x)=-(4(x+1))/x \ -> » class= »asciimath mathjax »>
» title= »p(x)=-(4(x+1))/x \ -> » class= »asciimath mathjax »> =e^(-int p(x)dx)=e^(4int (x+1)/xdx)")
)=x^4e^(4x)")
3. La deuxième solution est donnée par
)/((y_1)^2) dx")
 int (x^4e^(4x))/((e^(2x))^2) dx")
 int x^4 dx")
+C")
Comme nous recherchons la solution la plus simple, nous définissons une constante d’intégration de zéro. Comme n’importe quel multiple scalaire de est aussi une solution, on peut choisir ") comme étant la deuxième solution la plus simple.
comme étant la deuxième solution la plus simple.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=178
Bien que principalement détaillés pour les équations homogènes, les principes de cette méthode s’appliquent aux situations non homogènes en résolvant d’abord l’équation homogène associée et en trouvant ensuite une solution particulière au moyen des méthodes standard expliquées pour les équations non homogènes.
Sachant que  = x") est une solution à l’équation complémentaire, résous le problème de valeur initiale suivant.
est une solution à l’équation complémentaire, résous le problème de valeur initiale suivant.
=2,\ y'(1)=-3")
a. Trouver la deuxième solution de l’équation complémentaire :
Il faut suivre les étapes de la méthode de réduction d’ordre pour trouver la deuxième solution linéairement indépendante à l’équation complémentaire.
1a. Tout d’abord, standardiser l’équation en la divisant par le coefficient de :

2a. Identifier , le coefficient de la fonction de , puis trouver .
 » title= »p(x)=x^-1 \ -> » class= »asciimath mathjax »>
» title= »p(x)=x^-1 \ -> » class= »asciimath mathjax »> =e^(-int p(x)dx)=e^(-int x^-1dx)")
)=x^-1")
3a. La deuxième solution est donnée par
/(x^2) dx")

^0")
4a. La solution générale de l’équation complémentaire est

")
La constante peut absorber n’importe quel coefficient numérique de Ainsi, peut être simplifié en

b. Trouver une solution particulière à l’équation non homogène :
Il faut utiliser la méthode de variation des paramètres pour trouver la solution particulière .
1b. Standardiser l’équation différentielle d’origine.
")
2b. Les solutions de l’équation homogène sont maintenant connues :  et .
et .
Le wronskien de l’ensemble fondamental est
= |(x,x^-1 ),(1,-x^-2) |")

3b. Remplacer ensuite , , =x^-2(x^2+1)") et
et =-2x^-1") dans des formules pour et afin de les déterminer.
dans des formules pour et afin de les déterminer.
Trouver :
 x^-1)/(-2x^-1) dx")
dx")
dx")
")
Trouver :
 x)/(-2x^-1) dx")
dx")
")
4b. Remplacer et par dans l’expression de de façon à obtenir une solution particulière :
 x-1/2(x^3/3+x) x^-1")

c. Trouver la solution générale
La solution générale de l’équation non homogène est la somme de la solution particulière et de la solution complémentaire.
=1/3x^2-1+c_1x+c_2x^-1")
d. Appliquer les conditions initiales
Appliquer la condition initiale à :
-1+c_1(1)+c_2(1^-1)=2")


Appliquer la condition initiale à :
=2/3x+c_1-c_2x^-2")
=-3")
+c_1-c_2(1^-2) =-3")

Pour déterminer et , il faut résoudre le système suivant de deux équations et deux inconnues :
,(c_1-c_2=-11/3 ):}")
La résolution du système donne


La solution du problème de valeur initiale est donc
=1/3x^2-1-1/2x+19/6x^-1")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=178
 = e^(4 x)") est une solution à l’équation donnée, utilise la méthode de réduction d’ordre pour trouver une deuxième solution.
est une solution à l’équation donnée, utilise la méthode de réduction d’ordre pour trouver une deuxième solution. y'+(16x+4)y = 0, \quad x gt 0")
")
satisfait l’équation complémentaire. 
+c_1x+c_2/x")
satisfait l’équation complémentaire.  = 3 , \ y'(-1) = -3")
)")
14
L’équation de Cauchy-Euler, également connue sous le nom d’équation d’Euler, est un type d’équation différentielle linéaire du second ordre à coefficients variables qui apparaît dans de nombreuses applications en physique et en ingénierie. Ces équations sont particulièrement remarquables parce que leurs coefficients variables sont des puissances de la variable indépendante.
Les équations de Cauchy-Euler du second ordre présentent généralement la forme suivante :
Ici,  et
et  sont des constantes et
sont des constantes et ") est une fonction de la variable indépendante. L’équation est homogène si
est une fonction de la variable indépendante. L’équation est homogène si =0") et non homogène dans le cas contraire. Par exemple,
et non homogène dans le cas contraire. Par exemple,  est une équation de Cauchy-Euler.
est une équation de Cauchy-Euler.
Pour résoudre une équation de Cauchy-Euler homogène 3.7.1,
1. Remplacer et transformer : Soit  et forme l’équation caractéristique (auxiliaire). Ainsi,
et forme l’équation caractéristique (auxiliaire). Ainsi, ") et
et x^(r-2)") . En remplaçant cela dans l’équation 3.7.1, on obtient
. En remplaçant cela dans l’équation 3.7.1, on obtient
x^r+brx^r+cx^r=0")
 » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> +br+c)=0")
» title= »-> » class= »asciimath mathjax »> +br+c=0")
ce qui donne l’équation caractéristique.
r+c=0")
2. Résoudre l’équation caractéristique : Comme pour les équations à coefficients constants, il faut résoudre l’équation quadratique pour  et, selon la nature des racines, la solution aura différentes formes.
et, selon la nature des racines, la solution aura différentes formes.
Cas n° 1 : deux racines réelles distinctes  et
et
La solution générale sera la combinaison linéaire de ") et
et ") :
:
 + c_2 x^(r_2)")
Cas n° 2 : racine répétée
La solution générale sera la combinaison linéaire de  et
et  :
:

Cas n° 3 : racines complexes conjuguées 
La solution générale sera la combinaison linéaire de  cos(beta lnx)") et
et  sin(beta lnx)") :
:
(c_1cos(beta lnx) +c_2sin (betalnx))")
Résoudre le problème de valeur initiale

=-4,\ y'(1)=-1")
L’équation est une équation de Cauchy-Euler.
1. Il faut d’abord trouver son polynôme caractéristique donné  ,
,  et
et  :
:

L’équation a une racine répétée  , qui relève du cas n° 2.
, qui relève du cas n° 2.
2. La solution générale de l’équation est donc
=c_1 x^4 + c_2x^4lnx")
3. Utiliser les valeurs initiales pour trouver  et
et  :
:
=-4")
^4+c_2(1)^4ln(1)=-4") » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> 
=-1")
^3+4c_2(1)^3ln(1)+c_2(1)^3=-1") » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> 
La solution du PVI est donc
=-4x^4+15x^4lnx")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=180
Pour une équation de Cauchy-Euler non homogène, la méthode de variation des paramètres ou des coefficients indéterminés (le cas échéant) est utilisée.

=c_1x^4+c_2x")

=1,\ y'(1)=2")
=9/2x^-5-7/2x^-7")
15
En passant ainsi des équations différentielles ordinaires du premier ordre à celles du second ordre, nous allons découvrir diverses applications qui peuvent être modélisées par ces équations d’ordre supérieur. Dans cette section et les suivantes, nous abordons deux grands domaines où les équations différentielles du second ordre sont largement appliquées : les vibrations mécaniques et les circuits électriques (circuits RLC). Fondamentaux en ingénierie et en physique, ces domaines fournissent de précieux contextes pour comprendre le comportement des systèmes dynamiques.
L’étude des vibrations mécaniques est cruciale pour la conception et l’analyse des systèmes qui subissent des mouvements oscillatoires. La compréhension des vibrations aide les ingénieurs à réduire le bruit, à prévenir les défaillances catastrophiques dues à la résonance et à optimiser les performances de divers systèmes mécaniques, allant des bâtiments et des ponts aux suspensions de véhicules et aux composants électroniques. La modélisation de ces systèmes permet aux ingénieurs de prévoir les réponses à divers stimuli, garantissant ainsi la sécurité et la fonctionnalité.
Pour modéliser un système vibratoire, nous nous servons généralement d’une représentation simplifiée impliquant des masses, des ressorts et des amortisseurs. Ces éléments illustrent la dynamique essentielle de systèmes réels plus complexes. En utilisant les lois du mouvement de Newton ou des méthodes énergétiques, nous développons un modèle mathématique qui se traduit généralement par une équation différentielle du second ordre.
Le système consiste en une masse, typiquement désignée par  , qui représente l’objet en mouvement. Un ressort au coefficient de rigidité
, qui représente l’objet en mouvement. Un ressort au coefficient de rigidité  0″ title= »k>0″ class= »asciimath mathjax »> lui est attaché, produisant une force de rappel proportionnelle et opposée au déplacement par rapport à sa position d’équilibre, conformément à la loi de Hooke. Dans de nombreux scénarios pratiques, ce système peut également être doté d’un composant amortisseur caractérisé par un coefficient d’amortissement, représentant la résistance au mouvement due à des facteurs tels que la résistance de l’air ou le frottement interne dans le système. L’amortisseur exerce une force qui est proportionnelle à la vitesse de la masse, mais dans la direction opposée au mouvement. En outre, le système peut être soumis à une force externe
0″ title= »k>0″ class= »asciimath mathjax »> lui est attaché, produisant une force de rappel proportionnelle et opposée au déplacement par rapport à sa position d’équilibre, conformément à la loi de Hooke. Dans de nombreux scénarios pratiques, ce système peut également être doté d’un composant amortisseur caractérisé par un coefficient d’amortissement, représentant la résistance au mouvement due à des facteurs tels que la résistance de l’air ou le frottement interne dans le système. L’amortisseur exerce une force qui est proportionnelle à la vitesse de la masse, mais dans la direction opposée au mouvement. En outre, le système peut être soumis à une force externe ") , qui peut varier dans le temps et induire des vibrations forcées.
, qui peut varier dans le temps et induire des vibrations forcées.
 lorsqu’il n’est pas étiré. Lorsqu’on attache une masse au ressort, celui-ci s’étire d’une longueur
lorsqu’il n’est pas étiré. Lorsqu’on attache une masse au ressort, celui-ci s’étire d’une longueur  . Le point où la masse s’immobilise et où le ressort cesse de s’étirer est la position d’équilibre. À ce point, le système est stable et la masse reste immobile tant que rien ne vient la perturber. Dans ce système, nous définissons
. Le point où la masse s’immobilise et où le ressort cesse de s’étirer est la position d’équilibre. À ce point, le système est stable et la masse reste immobile tant que rien ne vient la perturber. Dans ce système, nous définissons  comme le déplacement de la masse par rapport à sa position d’équilibre, où les valeurs positives indiquent un mouvement vers le haut.
comme le déplacement de la masse par rapport à sa position d’équilibre, où les valeurs positives indiquent un mouvement vers le haut.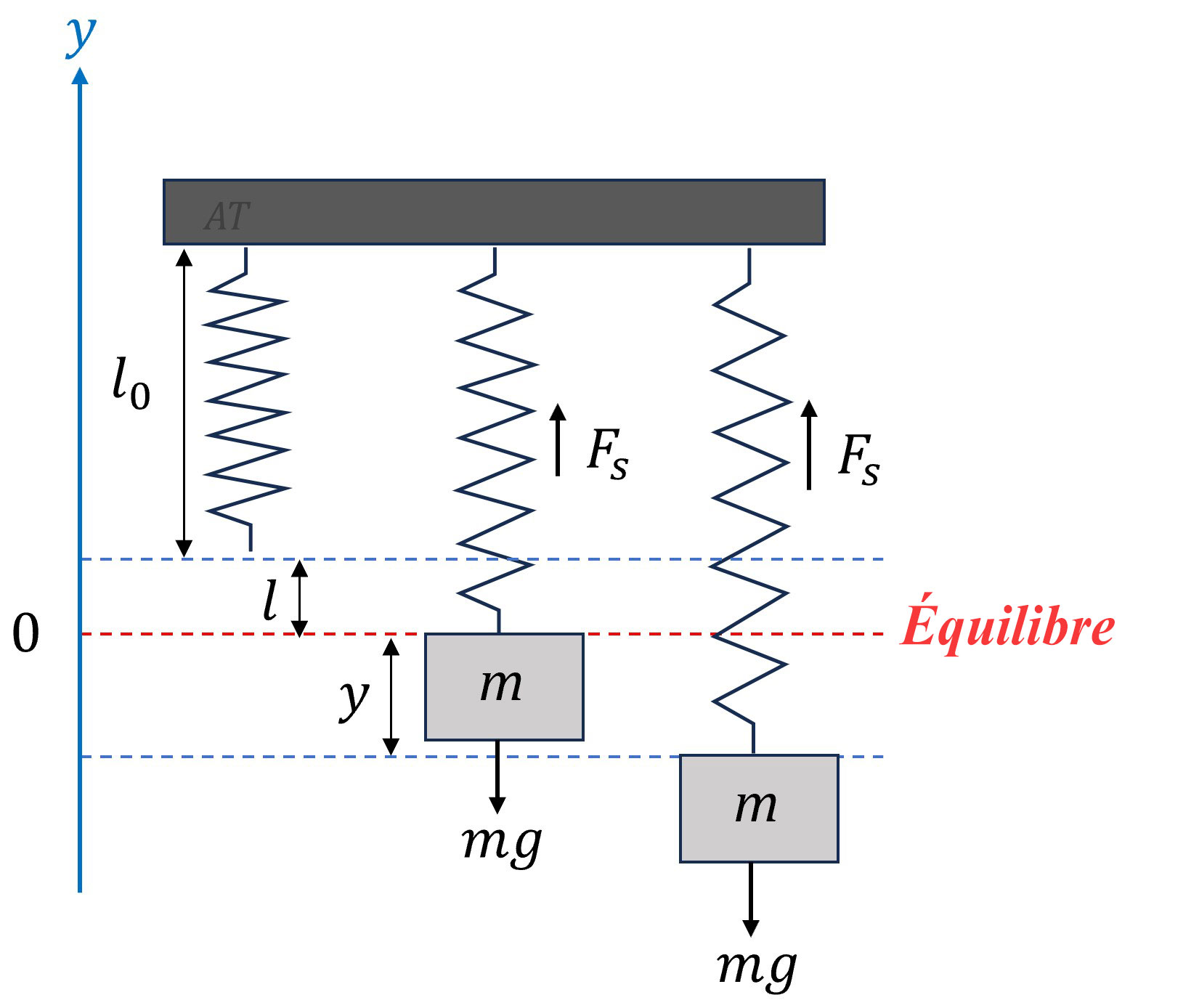
Pour dériver l’équation régissant le mouvement d’un système ressort-masse-amortisseur, nous appliquons la deuxième loi du mouvement de Newton, qui établit la force nette agissant sur la masse et son accélération. Les principales forces agissant sur la masse dans un système ressort-masse sont les suivantes :
 agissant vers le bas.
agissant vers le bas.") , où
, où  est la constante du ressort. Cette force est définie par la loi de Hooke et est généralement proportionnelle au déplacement par rapport à la longueur naturelle du ressort () et de direction opposée.
est la constante du ressort. Cette force est définie par la loi de Hooke et est généralement proportionnelle au déplacement par rapport à la longueur naturelle du ressort () et de direction opposée. , où est le coefficient d’amortissement. Si elle est présente, la force d’amortissement est proportionnelle à la vitesse de la masse, mais dans la direction opposée au mouvement.. Il s’agit de toute force agissant sur le système, qui peut être périodique ou aléatoire, et induisant des vibrations forcées.
, où est le coefficient d’amortissement. Si elle est présente, la force d’amortissement est proportionnelle à la vitesse de la masse, mais dans la direction opposée au mouvement.. Il s’agit de toute force agissant sur le système, qui peut être périodique ou aléatoire, et induisant des vibrations forcées.D’après la deuxième loi du mouvement de Newton,

En substituant toutes les forces et en écrivant l’accélération comme la dérivée seconde du déplacement, on obtient
")
-cy'+F(t)")
")
Au point d’équilibre, la somme de toutes les forces agissant sur la masse est égale à zéro. Par conséquent,




Si l’on simplifie l’équation en introduisant pour se concentrer sur les écarts par rapport à l’équilibre, on obtient la forme standard de l’équation de vibration.
Ici, est le déplacement par rapport à la position d’équilibre,  est la vitesse,
est la vitesse,  est l’accélération et représente toute force externe appliquée sur le système. On résout généralement cette équation avec les conditions initiales pour le déplacement initial de la position d’équilibre :
est l’accélération et représente toute force externe appliquée sur le système. On résout généralement cette équation avec les conditions initiales pour le déplacement initial de la position d’équilibre : =y_0") et la vitesse initiale :
et la vitesse initiale : =y'_0") .
.
Selon les forces qui agissent sur le système, il existe plusieurs cas particuliers :
=0") ) : la forme la plus simple de vibration se produit lorsqu’il n’y a ni amortissement, ni force externe. Le système oscille à sa fréquence naturelle, déterminée par la masse et la constante du ressort.
) : la forme la plus simple de vibration se produit lorsqu’il n’y a ni amortissement, ni force externe. Le système oscille à sa fréquence naturelle, déterminée par la masse et la constante du ressort.=0") ) : lorsque l’amortissement est présent mais qu’il n’y a pas de force extérieure, le système subit des vibrations amorties qui entraînent une diminution progressive de l’amplitude de l’oscillation au fil du temps. La nature de l’amortissement (sous-amortissement, amortissement critique, sur-amortissement) dépend des valeurs de , et .
) : lorsque l’amortissement est présent mais qu’il n’y a pas de force extérieure, le système subit des vibrations amorties qui entraînent une diminution progressive de l’amplitude de l’oscillation au fil du temps. La nature de l’amortissement (sous-amortissement, amortissement critique, sur-amortissement) dépend des valeurs de , et .ne0") ) : lorsqu’une force externe agit sur le système, celui-ci subit des vibrations forcées. Si la fréquence de la force externe est proche de la fréquence naturelle du système, il peut y avoir de la résonance,entraînant des oscillations de grande amplitude.
) : lorsqu’une force externe agit sur le système, celui-ci subit des vibrations forcées. Si la fréquence de la force externe est proche de la fréquence naturelle du système, il peut y avoir de la résonance,entraînant des oscillations de grande amplitude.ne0") ) : c’est le cas le plus général, qui combine les effets de l’amortissement et de la force externe, induisant un comportement oscillatoire complexe.
) : c’est le cas le plus général, qui combine les effets de l’amortissement et de la force externe, induisant un comportement oscillatoire complexe.la forme la plus simple de vibration se produit lorsqu’il n’y a ni amortissement ( ), ni force externe. (
), ni force externe. (=0") ). En ce cas, l’équation 3.8.1 se réduit à
). En ce cas, l’équation 3.8.1 se réduit à
 (3.8.2)
(3.8.2)
Cette équation est une équation différentielle linéaire homogène du second ordre. En résolvant l’équation caractéristique  , on observe que les racines sont des racines complexes conjuguées données par
, on observe que les racines sont des racines complexes conjuguées données par
")
Le terme ") est la fréquence naturelle du système, indiquée par
est la fréquence naturelle du système, indiquée par  . La solution de l’équation est donc exprimée sous la forme
. La solution de l’équation est donc exprimée sous la forme
Il est souvent commode de représenter le déplacement sous forme d’amplitude-phase avec une seule fonction trigonométrique
Ici,  est l’amplitude de l’oscillation, donnée par
est l’amplitude de l’oscillation, donnée par ") , et
, et  est l’angle de phase, qui peut être déterminé à partir des conditions initiales du système. L’angle de phase est généralement choisi de façon à satisfaire
est l’angle de phase, qui peut être déterminé à partir des conditions initiales du système. L’angle de phase est généralement choisi de façon à satisfaire  pour l’unicité et est lié à et .
pour l’unicité et est lié à et .
,")
=c_1/R=c_1/(sqrt(c_1^2+c_2^2))") et
et =c_2/R=c_2/(sqrt(c_1^2+c_2^2))")
Le mouvement décrit par l’équation 3.8.4 est connu sous le nom de mouvement harmonique simple, caractérisé par sa nature sinusoïdale et sa fréquence constante. La période du mouvement est /(omega_0)") , représentant le temps qu’il faut pour effectuer un cycle complet.
, représentant le temps qu’il faut pour effectuer un cycle complet.
 correspond généralement à
correspond généralement à  et les longueurs doivent être exprimées en mètres et les masses en kilogrammes. Dans le système impérial, correspond à
et les longueurs doivent être exprimées en mètres et les masses en kilogrammes. Dans le système impérial, correspond à , avec les longueurs en pieds et la masse en slugs. dans l’intervalle
, avec les longueurs en pieds et la masse en slugs. dans l’intervalle ") garantit l’obtention d’une solution dans un cycle complet. Les signes de et déterminent le quadrant dans lequel se trouve.
garantit l’obtention d’une solution dans un cycle complet. Les signes de et déterminent le quadrant dans lequel se trouve.  , est dans le premier quadrant.
, est dans le premier quadrant. , est dans le deuxième quadrant.
, est dans le deuxième quadrant. , est dans le troisième quadrant.
, est dans le troisième quadrant. , est dans le quatrième quadrant.
, est dans le quatrième quadrant.
Un ressort vertical de 150 cm de long est suspendu à un plafond fixe. Un objet de 2 kg est attaché à l’extrémité inférieure du ressort, et le ressort s’allonge à 155 cm là où l’objet est en équilibre. L’objet est ensuite tiré vers le bas sur 3 cm supplémentaires, puis relâché avec une vitesse initiale de 20 cm/s vers le haut. En supposant qu’il n’y a pas d’amortissement et qu’aucune force extérieure autre que la gravité n’agit sur le système :
a) Déterminer le déplacement de l’objet en fonction du temps.
b) Déterminer la fréquence naturelle, la période et l’angle de phase du mouvement.
c) Réécrire l’équation du mouvement sous la forme amplitude-phase  = R cos(omega_0 t - phi)") .
.
Exprimer les réponses en unités CGS, où  .
.
Informations données :



=-3 \ "cm"")
=20\ "cm"//"s"")
a)
Calculer la constante du ressort
À l’équilibre, les forces agissant sur l’objet sont équilibrées, de sorte que  . Cela permet de déterminer la constante du ressort .
. Cela permet de déterminer la constante du ressort .
 \ k/m=g/(l) » title= »mg=k(l) ->\ k/m=g/(l) » class= »asciimath mathjax »>
\ k/m=g/(l) » title= »mg=k(l) ->\ k/m=g/(l) » class= »asciimath mathjax »>

=392,000\ "dyne/cm"")
Calculer la fréquence naturelle :
La fréquence naturelle est
 =sqrt(196)=14")
Il convient de noter que, pour trouver , nous avons besoin du ratio de et de , et non de leurs valeurs individuelles.
Trouver la solution générale :
Étant donné qu’il n’y a ni amortissement, ni force externe, le problème de valeur initiale est

=-3,")
=20")
La solution générale de cette équation est donnée par l’équation 3.8.3.
=c_1cos(14t)+c_2sin(14t)")
Appliquer les conditions initiales :
=-3")
+c_2sin(0)=-3")

=-14c_1sin(14t)+14c_2cos(14t)")
+14c_2cos(0)=20")


L’équation du déplacement de l’objet est donc
=-3cos(14t)+10/7sin(14t)")
b)
Fréquence naturelle : 
Période : /(omega_0)=pi/7 \ "s"")
L’amplitude est donnée par
^2+(10/7)^2)=1/7sqrt(541)")
Angle de phase :
L’angle de phase de référence est déterminé par
")
/-3|)~~0.444 \ "rad"")
Puisque  (
(lt0") ) et
) et  (
(gt0") ), devrait se trouver dans le deuxième quadrant. Par conséquent,
), devrait se trouver dans le deuxième quadrant. Par conséquent,
 .
.
c) L’équation peut être rédigée sous la forme
 = 1/7sqrt(541) cos(14 t - 2.697)")
Le graphique du déplacement est montré pour les sept premières secondes.

Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=182
Dans une vibration libre amortie, il n’y a pas de force externe (). Partant, l’équation 3.8.1 est simplifiée en une équation différentielle linéaire homogène du second ordre.
Cette équation est une équation différentielle linéaire homogène du second ordre. En résolvant l’équation caractéristique  avec la formule quadratique, on trouve les racines
avec la formule quadratique, on trouve les racines
=(-c+-sqrt(c^2-4mk))/(2m)")
En fonction du discriminant  , on trouve trois types de mouvement :
, on trouve trois types de mouvement :
1. Amortissement critique ( )
)
En ce cas, il y a une racine répétée ") , de sorte que la solution générale de l’équation 3.8.5 devient
, de sorte que la solution générale de l’équation 3.8.5 devient
Ici, le mouvement subit un amortissement critique car l’amortissement est juste suffisant pour empêcher l’oscillation. Ce niveau d’amortissement est atteint lorsque le coefficient d’amortissement

")
") est appelé coefficient d’amortissement critique et est transcrit par
est appelé coefficient d’amortissement critique et est transcrit par ") .
.
=2sqrt(mk)")
Il convient de noter que plus le temps passe ( ), plus le déplacement
), plus le déplacement ") approche de zéro, indiquant que le système se stabilise rapidement et en douceur à sa position d’équilibre, sans oscillation ni dépassement de la position d’équilibre, comme le font les amortisseurs dans les systèmes de suspension automobiles.
approche de zéro, indiquant que le système se stabilise rapidement et en douceur à sa position d’équilibre, sans oscillation ni dépassement de la position d’équilibre, comme le font les amortisseurs dans les systèmes de suspension automobiles.
2. Suramortissement ( )
)
En ce cas, il y a deux racines réelles distinctes , toutes deux négatives. La solution générale de l’équation 3.8.5 devient
Comme et  sont négatifs, plus le temps passe ( ), plus le déplacement approche de zéro et le système revient graduellement à l’équilibre sans osciller. Il y a suramortissement lorsque
sont négatifs, plus le temps passe ( ), plus le déplacement approche de zéro et le système revient graduellement à l’équilibre sans osciller. Il y a suramortissement lorsque ") , typiquement souhaité dans les systèmes où le dépassement de la position d’équilibre, risque d’être néfaste ou indésirable, comme dans les équipements lourds. Les systèmes suramortis reviennent plus lentement à l’équilibre que les systèmes à amortissement critique. Cette réponse plus lente s’explique par la force d’amortissement plus élevée appliquée, qui empêche l’oscillation mais résiste également au mouvement, ce qui entraîne un retour lent.
, typiquement souhaité dans les systèmes où le dépassement de la position d’équilibre, risque d’être néfaste ou indésirable, comme dans les équipements lourds. Les systèmes suramortis reviennent plus lentement à l’équilibre que les systèmes à amortissement critique. Cette réponse plus lente s’explique par la force d’amortissement plus élevée appliquée, qui empêche l’oscillation mais résiste également au mouvement, ce qui entraîne un retour lent.
3. Sous-amortissement ( )
)
En ce cas, les racines de l’équation caractéristique sont des racines complexes conjuguées données par
=-c/(2m)+-(sqrt(4mk-c^2))/(2m)i=-c/(2m)+-omega_1i")
La solution générale de l’équation 3.8.5 est donc
Le terme )/(2m)") est lié à la fréquence d’oscillation. Comme pour le mouvement harmonique, on peut dériver la forme amplitude-phase de l’équation du mouvement.
est lié à la fréquence d’oscillation. Comme pour le mouvement harmonique, on peut dériver la forme amplitude-phase de l’équation du mouvement.
Là encore,
, =(c_1)/R") , et
, et =(c_2)/R")
Un système sous-amorti se caractérise par un coefficient d’amortissement ") . Dans ce scénario, l’amortissement ne suffit pas à arrêter les oscillations, si bien que le système affiche un comportement oscillatoire autour de la position d’équilibre. L’amplitude de ces oscillations diminue au fil du temps, représentée par le terme variable dans le temps
. Dans ce scénario, l’amortissement ne suffit pas à arrêter les oscillations, si bien que le système affiche un comportement oscillatoire autour de la position d’équilibre. L’amplitude de ces oscillations diminue au fil du temps, représentée par le terme variable dans le temps t)") . Comme l’exposant
. Comme l’exposant ") est toujours négatif, se rapproche graduellement de zéro au fil du temps (). Il s’ensuit une réponse élastique du système à la moindre perturbation.
est toujours négatif, se rapproche graduellement de zéro au fil du temps (). Il s’ensuit une réponse élastique du système à la moindre perturbation.
Ce comportement est souvent celui qui est préféré dans diverses applications. Dans les instruments de musique, par exemple, les vibrations sous-amorties des cordes ou des membranes contribuent à produire un son soutenu et résonnant. De même, les amortisseurs sismiques dans les bâtiments utilisent une réponse sous-amortie contrôlée pour dissiper en toute sécurité l’énergie des tremblements de terre, ce qui permet aux structures d’osciller et de réduire les contraintes sans s’effondrer.
Une masse de 1 kg est attachée à un ressort d’une rigidité de 64 N/m et à un amortisseur avec une constante d’amortissement de 16 N.s/m. L’objet est comprimé à 20 cm au-dessus de son point d’équilibre, puis relâché avec une vitesse initiale de 2 m/s. Trouver le déplacement de l’objet en fonction du temps.
Informations données :



=20 \ "cm"=")

=2\ "m"//"s"")
Le problème de valeur initiale pour ce système est

=0,2,")
=2")
Avant de résoudre le PVI, on peut calculer le coefficient d’amortissement critique afin de déterminer le type d’amortissement.
=2sqrt(1(64))=16")
Le coefficient d’amortissement est égal au coefficient d’amortissement critique (=16") ), de sorte que le système présente un amortissement critique.
), de sorte que le système présente un amortissement critique.
Trouver la solution générale :
La solution générale d’un système à amortissement critique est donnée par l’équation 3.8.6.
=c_1e^(-c/(2m)t)+c_2te^(-c/(2m)t)")
=c_1e^(-8t)+c_2te^(-8)")
Appliquer les conditions initiales :
=0,2")
+0=0,2")

=-8c_1e^(-8t)+c_2e^(-8t)(1-8t)")
+c_2e^0(1)=2")
+c_2=2")

L’équation du déplacement de l’objet est donc
=0,2e^(-8t)+3,6te^(-8t)")
Le graphique du déplacement est montré au cours des trois premières secondes. Comme prévu, le système se déplace sans heurts et revient rapidement à sa position d’équilibre sans oscillation.
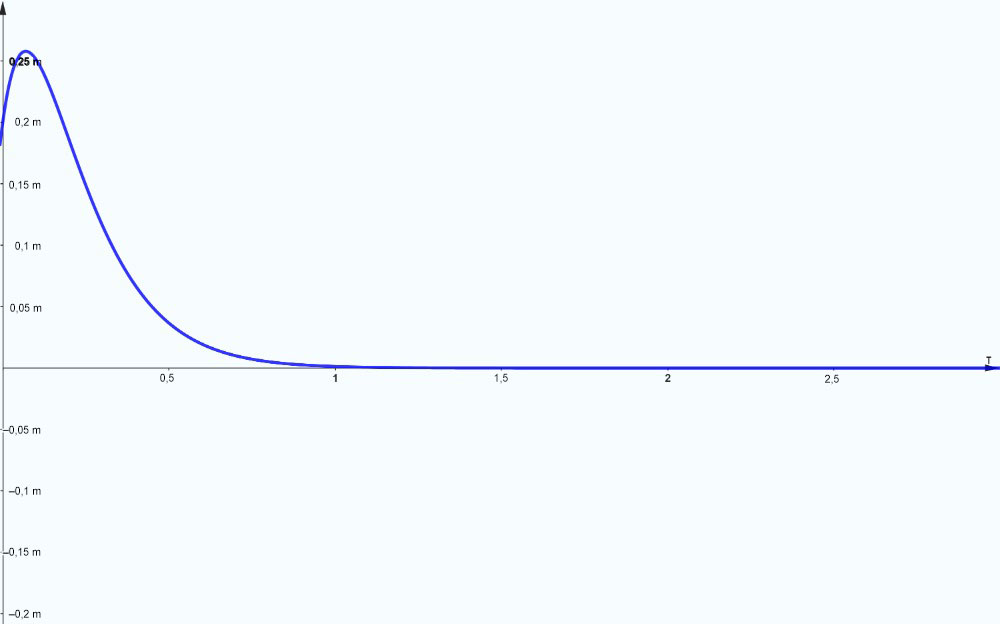
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=182
Trouver le déplacement de l’objet dans l’exemple 3.8.2, avec un ressort maintenant attaché à un amortisseur avec une constante d’amortissement de 34 N.s/m.
Informations données :

Le problème de valeur initiale pour ce système est

Dans l’exemple précédent, on a trouvé un coefficient d’amortissement critique de =16") . Dans ce nouveau système, le coefficient d’amortissement est supérieur à sa valeur critique (
. Dans ce nouveau système, le coefficient d’amortissement est supérieur à sa valeur critique ( c_(cr)=16″ title= »c>c_(cr)=16″ class= »asciimath mathjax »>), de sorte que le système est suramorti.
c_(cr)=16″ title= »c>c_(cr)=16″ class= »asciimath mathjax »>), de sorte que le système est suramorti.
Trouver la solution générale :
L’équation caractéristique pour cette équation différentielle a deux racines réelles distinctes.
=(-34+-sqrt(34^2-4(1)(64)))/(2(1))")


La solution générale d’un système suramorti est donnée par l’équation 3.8.7.
=c_1e^(r_1t)+c_2e^(r_2t)")
=c_1e^(-2t)+c_2e^(-32t)")
Appliquer les conditions initiales :
+c_2e^0=0,2")

=-2c_1e^(-2t)-32c_2e^(-32t)")
-32c_2e^0=2")

En résolvant le système pour les constantes et , on obtient

L’équation du déplacement de l’objet est donc
=0,28e^(-2t)-0,08e^(-32t)")
Le graphique ci-dessous montre le déplacement au cours des trois premières secondes. Il confirme que le système revient progressivement à sa position d’équilibre, en douceur et sans oscillation. Comparé au système à amortissement critique de l’exemple 3.8.2, ce système suramorti prend plus de temps à se stabiliser. Ce comportement plus lent souligne que l’augmentation de la force d’amortissement dans le système suramorti retarde le retour à l’équilibre.
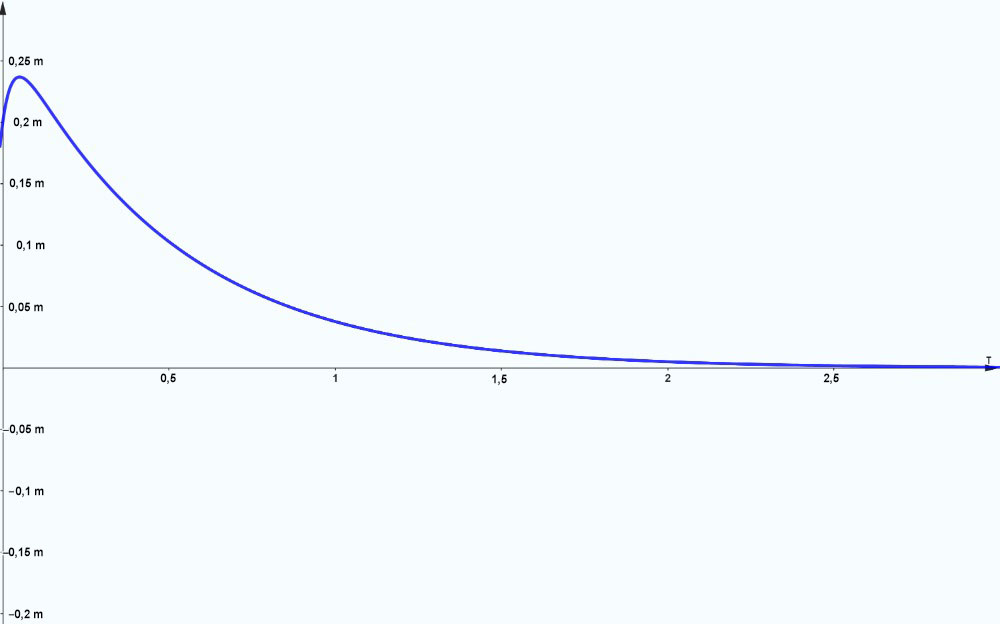
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=182
Trouver le déplacement de l’objet dans l’exemple 3.8.2, avec un ressort maintenant attaché à un amortisseur avec une constante d’amortissement de 4 N.s/m.
Informations données :

Le problème de valeur initiale pour ce système est

Dans l’exemple 3.8.2, on a trouvé un coefficient d’amortissement critique de . Dans ce nouveau système, le coefficient d’amortissement est inférieur à sa valeur critique (=16") ), de sorte que le système est sous-amorti.
), de sorte que le système est sous-amorti.
Trouver la solution générale :
L’équation caractéristique pour cette équation différentielle a deux racines complexes conjuguées.
=-4/(2(1))+-(sqrt(4(1)(64)-4^2))/(2(1))i=-2+-2sqrt(15)i")
La solution générale d’un système sous-amorti est donnée par l’équation 3.8.8.
=e^(-2t)(c_1cos(2sqrt(15)t)+c_2sin(2sqrt(15)t))")
Appliquer les conditions initiales :
(c_1cos(0)+c_2sin(0))=0,2")
=e^(-2t)(-2c_1cos(2sqrt(15)t)-2c_2sin(2sqrt(15)t)-")
 c_1sin(2sqrt(15)t)+2sqrt(15) c_2cos(2sqrt(15)t))")
c_2=2")
+2sqrt(15)c_2=2")
)/25")
L’équation du déplacement de l’objet est donc
=e^(-2t)(0,2cos(2sqrt(15)t)+(2sqrt(15))/25 sin(2sqrt(15)t))")
La forme amplitude-phase de l’équation est
=sqrt(85)/25e^(-2t)cos(2sqrt(15)t-0,9976)")
Le graphique illustre le déplacement du système sur les trois premières secondes. Ce système sous-amorti n’est pas assez amorti pour stopper les oscillations, d’où un schéma d’oscillations décroissantes autour de la position d’équilibre. Ces oscillations diminuent en amplitude pendant environ deux secondes avant que le système ne se stabilise à la position d’équilibre.
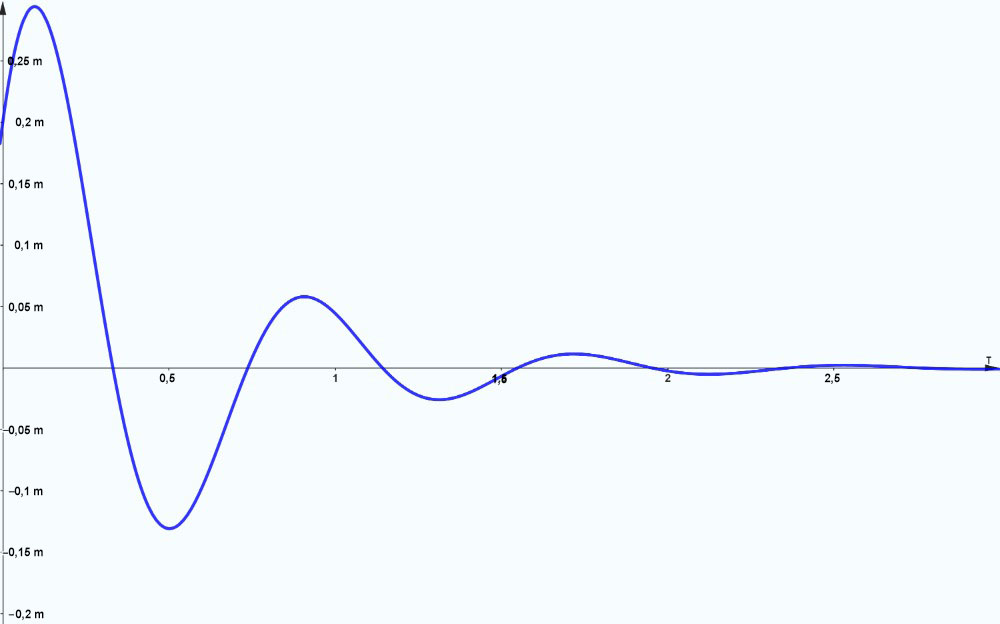
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=182
Un système subit une vibration forcée non amortie lorsqu’il est soumis à une force externe, typiquement modélisée comme une fonction périodique telle que =F_0 cos(omega t)") ou
ou =F_0 sin(omega t)") . Ces forces sinusoïdales proviennent généralement de mécanismes de rotation, de courants alternatifs ou d’autres phénomènes cycliques. L’équation du mouvement d’un tel système s’exprime comme suit
. Ces forces sinusoïdales proviennent généralement de mécanismes de rotation, de courants alternatifs ou d’autres phénomènes cycliques. L’équation du mouvement d’un tel système s’exprime comme suit
")
La solution générale de l’équation différentielle est
=y_p (t)+y_c (t)")
Ici, la solution comprend une partie complémentaire ") , qui représente la réponse vibratoire libre et non amortie, et une partie particulière
, qui représente la réponse vibratoire libre et non amortie, et une partie particulière ") , qui représente la réponse du régime permanent à la fonction de forçage. La solution complémentaire, dictée par la fréquence naturelle du système
, qui représente la réponse du régime permanent à la fonction de forçage. La solution complémentaire, dictée par la fréquence naturelle du système  , est donnée par l’équation 3.8.3 :
, est donnée par l’équation 3.8.3 :
=c_1cos(omega_0t)+c_2sin(omega_0t)")
Pour déterminer la solution particulière, il faut normalement employer des méthodes telles que les coefficients indéterminés ou la variation des paramètres. Étant donné que l’on recherche la solution particulière, en fonction de la fréquence d’excitation oméga, on considère deux cas :
1. Sans résonance ( ) : lorsque la fréquence d’excitation est différente de la fréquence naturelle, la solution particulière prend la forme
) : lorsque la fréquence d’excitation est différente de la fréquence naturelle, la solution particulière prend la forme
=Acos(omegat)+Bsin(omegat).")
Pour trouver les valeurs spécifiques des coefficients A et B, on utilise la méthode des coefficients indéterminés. Une fois ces coefficients déterminés, la solution particulière peut être exprimée sous la forme
)cos(omega t),")
et la solution générale est
=F_0/(m(omega_0^2-omega^2))cos(omega t)+")
+c_2sin(omega_0t)") (3.8.10)
(3.8.10)
La fonction de déplacement est constituée de composantes sinusoïdales et cosinusoïdales d’amplitude limitée.
2. Avec résonance ( ) : lorsque la fréquence d’excitation est égale à la fréquence naturelle, la solution particulière prend la forme
) : lorsque la fréquence d’excitation est égale à la fréquence naturelle, la solution particulière prend la forme
=t(Acos(omegat)+Bsin(omegat))")
En utilisant la méthode des coefficients indéterminés et après avoir déterminé les coefficients, la solution particulière peut être exprimée sous la forme
t sin(omega_0 t)")
La solution générale est donc
En ce cas, la solution particulière comporte un facteur temporel  , indiquant la hausse illimitée de l’amplitude. Ce phénomène, connu sous le nom de résonance, augmente considérablement l’amplitude des oscillations et présente des risques potentiels, notamment de défaillance mécanique due à des oscillations excessives.
, indiquant la hausse illimitée de l’amplitude. Ce phénomène, connu sous le nom de résonance, augmente considérablement l’amplitude des oscillations et présente des risques potentiels, notamment de défaillance mécanique due à des oscillations excessives.
L’amplitude des oscillations dans une vibration forcée est sensible à la relation entre la fréquence d’excitation et la fréquence naturelle du système. Lorsque la fréquence d’excitation se rapproche de la fréquence naturelle, l’amplitude augmente et atteint son pic au moment de la résonance. Cette sensibilité est un facteur clé dans la conception des structures et des systèmes, le but étant d’éviter que leurs fréquences naturelles soient alignées sur les fréquences des forces environnementales courantes, comme le vent ou la circulation. Un tel alignement pourrait déclencher une résonance, mettant en péril l’intégrité de la structure.
Cela étant, il existe des applications spécifiques qui tirent avantage de l’induction de la résonance, par exemple dans les filtres et les capteurs mécaniques, où la résonance peut améliorer la sensibilité ou l’intensité du signal.
Un objet de 32 livres (lb) est suspendu à un ressort, qu’il faut étirer de 6 pouces (inches) pour atteindre l’équilibre. Ce système non amorti est soumis à une force externe  = 2cos(8t)") et subit une résonance. Au départ, l’objet est déplacé de 3 pouces au-dessous de la position d’équilibre et reçoit une vitesse ascendante de 1 pied par seconde (ft/s). Déterminer le déplacement de l’objet dans ces conditions.
et subit une résonance. Au départ, l’objet est déplacé de 3 pouces au-dessous de la position d’équilibre et reçoit une vitesse ascendante de 1 pied par seconde (ft/s). Déterminer le déplacement de l’objet dans ces conditions.
Informations données :


 = 2 cos(8t)")
=-3\ "in"=")

=1\ "ft"//"s"")
Calculer la constante du ressort
Dans le système britannique, le poids est généralement exprimé en livres (pounds). Pour trouver la constante du ressort, il faut d’abord convertir le poids en masse au moyen de la formule


À l’équilibre, . Cette relation permet de calculer la constante du ressort .
 \ k=(mg)/( l) » title= »mg=k( l) ->\ k=(mg)/( l) » class= »asciimath mathjax »>
\ k=(mg)/( l) » title= »mg=k( l) ->\ k=(mg)/( l) » class= »asciimath mathjax »>

Calculer la fréquence naturelle :
La fréquence naturelle est
 =sqrt(64)=8")
Par ailleurs, si le système résonne à une fréquence d’excitation de  (à partir de ), cette fréquence de résonance devrait correspondre à la fréquence naturelle du système, réaffirmant que
(à partir de ), cette fréquence de résonance devrait correspondre à la fréquence naturelle du système, réaffirmant que  .
.
Trouver la solution générale :
Le problème de valeur initiale pour ce système est
,")
=-0.25,")
=1")
La solution générale d’un système subissant une résonance est donnée par l’équation 3.8.11.
=2/(2(1)(8))t sin(8 t)+c_1cos(8t)+c_2sin(8t)")
=1/8t sin(8 t)+c_1cos(8t)+c_2sin(8t)")
Appliquer les conditions initiales :
 » title= »y_0(0)=-0,25 \ -> » class= »asciimath mathjax »>
» title= »y_0(0)=-0,25 \ -> » class= »asciimath mathjax »> 
 » title= »y’_0(0)=1\ -> » class= »asciimath mathjax »>
» title= »y’_0(0)=1\ -> » class= »asciimath mathjax »> 
L’équation du déplacement de l’objet est donc
=1/8t sin(8 t)-1/4cos(8t)+1/8sin(8t)")
La solution complémentaire peut être écrite sous la forme amplitude-phase, en combinant les deux derniers termes.
=1/8tsin(8t)+sqrt(5)/8cos(8t-2.6779)")
Le graphique montre l’évolution du déplacement du système au cours des dix premières secondes. Comme la solution particulière inclut un facteur temps (t), l’amplitude du déplacement tend à devenir infiniment grande au fur et à mesure que le temps progresse vers l’infini. Cependant, dans la réalité, la plupart des systèmes subissent un certain amortissement. Même une petite dose d’amortissement peut avoir une incidence significative sur l’amplitude et le comportement du système, en particulier autour des fréquences de résonance, empêchant la croissance illimitée de l’amplitude dépeinte dans les modèles idéaux.
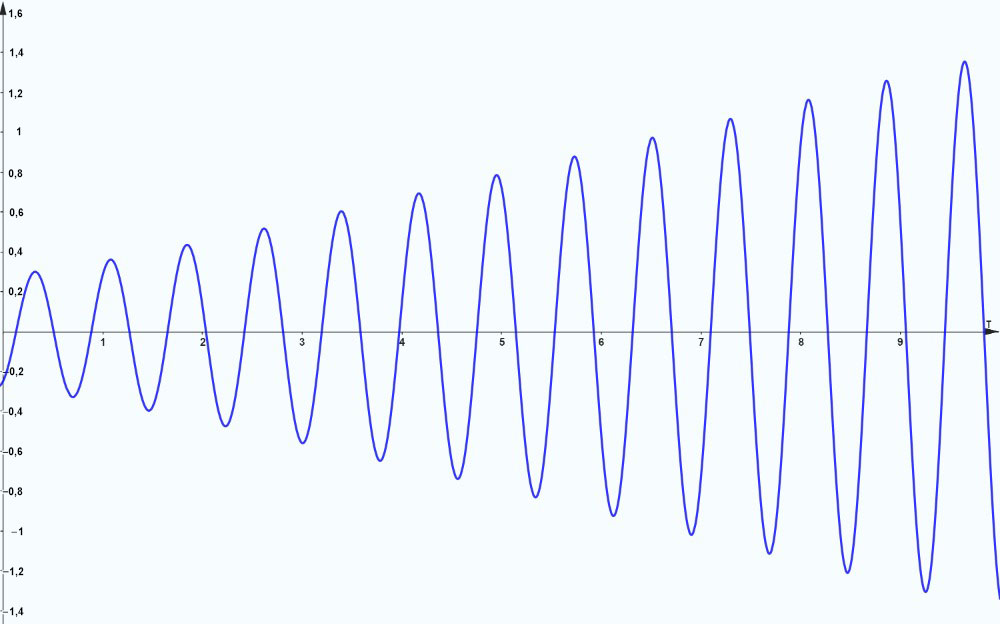
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=182
C’est le cas le plus général, qui combine les effets de l’amortissement et de la force externe. Le mouvement d’un tel système est régi par
")
La solution de l’équation différentielle est la somme des solutions complémentaire et particulière.
La solution complémentaire est la solution du comportement libre et amorti, tandis que la solution particulière est trouvée en utilisant la méthode des coefficients indéterminés ou de la variation des paramètres.
Compte tenu de notre connaissance des vibrations libres amorties, nous savons que, à mesure que le temps progresse vers l’infini, la solution complémentaire se rapproche de zéro. Par conséquent, le déplacement du système reflète de plus en plus le comportement de la solution particulière. Par conséquent, dans l’analyse vibratoire, la solution complémentaire est communément appelée régime transitoire, reflétant la réponse initiale, tandis que la solution particulière est connue sous le nom de régime permanent, illustrant la réponse continue à la force externe.
Trouver le déplacement de l’objet dans l’exemple 3.8.5, avec un ressort maintenant attaché à un amortisseur avec une constante d’amortissement de 34 lb/.s/ft
Informations données :

Dans l’exemple précédent, on a déterminé la constante du ressort : . Le problème de valeur initiale pour ce système est
,")
Étant donné que l’équation a deux racines réelles distinctes  et
et  , la solution complémentaire, d’après l’équation 3.8.7, est
, la solution complémentaire, d’après l’équation 3.8.7, est
=c_1e^(-4t)+c_2e^(-16t)")
Trouver la solution particulière :
Pour trouver la solution particulière, il faut utiliser la méthode des coefficients indéterminés. Compte tenu de la fonction cosinus de forçage, on suppose que la forme de la solution particulière est
+Bsin(8t)")
Les dérivées sont
+8Bcos(8t)")
-64Bsin(8t)")
En remplaçant  et ses dérivées dans l’équation différentielle, on obtient
et ses dérivées dans l’équation différentielle, on obtient
-64Bsin(8t)+20(-8Asin(8t)+8Bcos(8t))")
+Bsin(8t))=2cos(8t)")
En simplifiant, on obtient
-160Asin(8t)=2cos(8t)")
En faisant correspondre les coefficients des termes sinus et cosinus, on obtient
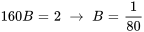 \ B=1/80″ title= »160B=2\ ->\ B=1/80″ class= »asciimath mathjax »>
\ B=1/80″ title= »160B=2\ ->\ B=1/80″ class= »asciimath mathjax »>
 \ A=0″ title= »-160A=0\ ->\ A=0″ class= »asciimath mathjax »>
\ A=0″ title= »-160A=0\ ->\ A=0″ class= »asciimath mathjax »>
La solution particulière est donc
")
En combinant les solutions particulière et complémentaire, on obtient la solution générale
=1/80sin(8t)+")
+c_2e^(-16t)")
Appliquer les conditions initiales :
» title= »y_0(0)=-0,25 \ -> » class= »asciimath mathjax »> 
» title= »y’_0(0)=1\ -> » class= »asciimath mathjax »> 
En résolvant le système, on obtient les constantes

L’équation du déplacement de l’objet est donc
=1/80sin(8t)-")
+1/120e^(-16t)")
Le graphique représente l’évolution du déplacement du système au cours des six premières secondes. Initialement, pendant la première seconde environ, le déplacement est principalement influencé par la solution complémentaire, ce qui reflète la phase transitoire. Après cette période initiale, le déplacement s’aligne de plus en plus sur la solution périodique particulière, représentant le comportement du système en régime permanent.
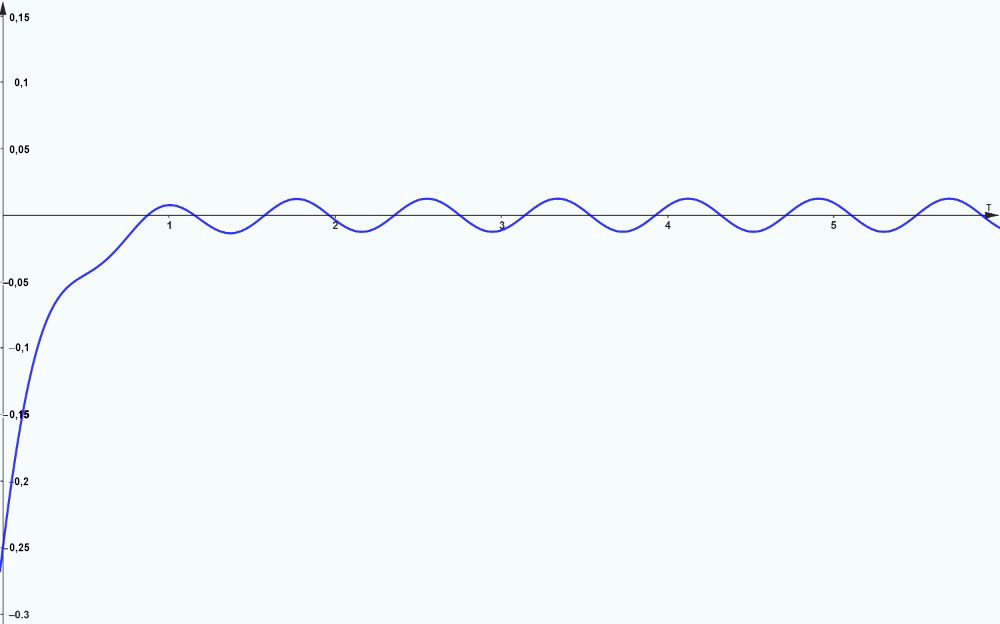
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=182
/(dt^2) + ky = 0")
où est le déplacement de la masse (par rapport à l’équilibre) à l’instant , est la masse de l’objet et est la constante du ressort. Une masse de  étire le ressort de
étire le ressort de  . a) Utilise cette information pour trouver la constante du ressort. (Utilise
. a) Utilise cette information pour trouver la constante du ressort. (Utilise  ). b) La masse est détachée du ressort et une nouvelle masse de
). b) La masse est détachée du ressort et une nouvelle masse de  est attachée. Cette masse est déplacée de
est attachée. Cette masse est déplacée de  au-dessus du point d’équilibre (le dessus est positif et le dessous est négatif), puis lancée à une vitesse initiale de
au-dessus du point d’équilibre (le dessus est positif et le dessous est négatif), puis lancée à une vitesse initiale de  . Rédige l’équation du mouvement sous la forme
. Rédige l’équation du mouvement sous la forme  = c_1 cos(omega t) + c_2 sin(omega t)") . Ne laisse aucune constante inconnue dans votre équation.
. Ne laisse aucune constante inconnue dans votre équation.
a)  N/m
N/m
b) =1/10cos(7sqrt(6)t)+2/(7sqrt(6))sin(7sqrt(6)t)")
 est attaché à un ressort avec une constante du ressort de
est attaché à un ressort avec une constante du ressort de  . Il est également attaché à un amortisseur à constante d’amortissement de
. Il est également attaché à un amortisseur à constante d’amortissement de  . L’objet est initialement déplacé de
. L’objet est initialement déplacé de  au-dessus du point d’équilibre, puis relâché. a) Trouve son déplacement pour
au-dessus du point d’équilibre, puis relâché. a) Trouve son déplacement pour 0″ title= »t > 0″ class= »asciimath mathjax »>. b) Décris le mouvement.
0″ title= »t > 0″ class= »asciimath mathjax »>. b) Décris le mouvement. a) =e^(-9/26t)(5cos(sqrt(387)/(26)t)+45/sqrt(387)sin(sqrt(387)/(26)t))")
b) Vibration libre non amortie
 est attaché à un ressort avec une constante du ressort de
est attaché à un ressort avec une constante du ressort de 
 . Il est également attaché à un amortisseur à constante d’amortissement de
. Il est également attaché à un amortisseur à constante d’amortissement de 
 . L’objet est tiré de
. L’objet est tiré de  vers le bas, puis relâché à une vitesse ascendante initiale de
vers le bas, puis relâché à une vitesse ascendante initiale de  . Trouve le déplacement de l’objet. Pars du principe que le déplacement et la vitesse sont positifs et ascendants.
. Trouve le déplacement de l’objet. Pars du principe que le déplacement et la vitesse sont positifs et ascendants. =-0,1 e^(-2t)+3,8te^(-2t)")
16
Dans cette section 2.5F, nous avons exploré les équations différentielles du premier ordre pour des circuits électriques constitués d’une source de tension dotée soit d’une résistance et d’un inducteur (RL), soit d’une résistance et d’un condensateur (RC). Maintenant que nous savons résoudre les équations différentielles du second ordre, nous sommes prêts à nous lancer dans l’analyse de circuits RLC plus complexes, composés d’une résistance, d’un inducteur et un condensateur.
Jusqu’à présent, nous avons vu que :
 aux bornes d’une résistance est proportionnelle au courant I circulant entre ces bornes, ce qui s’exprime par
aux bornes d’une résistance est proportionnelle au courant I circulant entre ces bornes, ce qui s’exprime par  , où est la résistance.
, où est la résistance. aux bornes d’un inducteur est proportionnelle au taux de variation du courant, ce qui s’exprime par
aux bornes d’un inducteur est proportionnelle au taux de variation du courant, ce qui s’exprime par /(dt)") , où
, où  est l’inductance.
est l’inductance. aux bornes d’un condensateur est proportionnelle à la charge électrique
aux bornes d’un condensateur est proportionnelle à la charge électrique  qui y est stockée, représentée par
qui y est stockée, représentée par , où
, où  est le condensateur.
est le condensateur.
Figure 3.9.1 Schéma de circuit série RLC
Sur ces bases, considérons que ") est la tension externe fournie au circuit série RLC représenté à la figure 3.9.1. En appliquant la loi des mailles de Kirchhoff, nous avons
est la tension externe fournie au circuit série RLC représenté à la figure 3.9.1. En appliquant la loi des mailles de Kirchhoff, nous avons
")
En remplaçant ,/dt") et dans cette équation, on obtient
et dans cette équation, on obtient
En différenciant cette équation en fonction du temps et en remplaçant /dt") , on la transforme en équation différentielle du seconde ordre.
, on la transforme en équation différentielle du seconde ordre.
/(dt^2)+R (dI)/dt+1/CI=(dE)/dt") (3.9.2)
(3.9.2)
De même l’équation 3.9.1 peut être exprimée en termes de charge ") .
.
/(dt^2)+R(dq)/(dt)+1/Cq=E(t)") (3.9.3)
(3.9.3)
Étant donné et une condition initiale, telle qu’un courant initial ") et une charge initiale
et une charge initiale ") , on peut résoudre l’équation pour
, on peut résoudre l’équation pour ") à l’aide des techniques abordées aux sections précédentes, par exemple la méthode des coefficients indéterminés. Une fois que est déterminé, la tension aux bornes des différents composants du circuit peut être calculée.
à l’aide des techniques abordées aux sections précédentes, par exemple la méthode des coefficients indéterminés. Une fois que est déterminé, la tension aux bornes des différents composants du circuit peut être calculée.
Prenons un circuit série RLC avec une résistance de  et un inducteur de
et un inducteur de  , ainsi qu’un condensateur de
, ainsi qu’un condensateur de  alimenté par une source de tension
alimenté par une source de tension =0.1sin(10t)\ "V"") . Au départ, le courant et la charge sur le condensateur sont nuls. Déterminer le courant dans le circuit en fonction du temps.
. Au départ, le courant et la charge sur le condensateur sont nuls. Déterminer le courant dans le circuit en fonction du temps.
Informations données :



=0 \ "A"")
=I'(0)=0 \ C")
L’équation différentielle pour un circuit série RLC est donnée par l’équation 3.9.1.
Le problème de valeur initiale est donc
/(dt^2)+0,06 (dI)/dt+89/50I=cos(10t),")
=0, \ I'(0)=0")
En multipliant l’équation par 100, on obtient
/(dt^2)+6 (dI)/dt+178I=100cos(10t),")
Étant donné que l’équation caractéristique a des racines complexes conjuguées =-3+-13i") , la solution complémentaire est
, la solution complémentaire est
=e^(-3t)(c_1cos(13t)+c_2sin(13t))")
Trouver la solution particulière :
Pour trouver la solution particulière, il faut utiliser la méthode des coefficients indéterminés. Compte tenu de la fonction cosinus de forçage, on suppose que la forme de la solution particulière est
+Bsin(10t)")
Les dérivées sont
+10Bcos(10t)")
-100Bsin(10t)")
En remplaçant  et ses dérivées dans l’équation différentielle, on obtient
et ses dérivées dans l’équation différentielle, on obtient
-100Bsin(10t) +6(-10Asin(10t)+10Bcos(10t) )")
+Bsin(10t))=")
")
En simplifiant, cela donne
cos(10t)+(-60A+78B)sin(10t)=100cos(10t)")
En faisant correspondre les coefficients des termes sinus et cosinus et en résolvant le système de deux équations dans les inconnues  et
et  , on obtient
, on obtient

La solution particulière est donc
+500/807sin(10t)")
En combinant les solutions particulière et complémentaire, on obtient la solution générale
=650/807cos(10t)+500/807sin(10t) +")
(c_1cos(13t)+c_2sin(13t))")
Appliquer les conditions initiales :
 » title= »I_0(0)=0 \ -> » class= »asciimath mathjax »>
» title= »I_0(0)=0 \ -> » class= »asciimath mathjax »> 
 » title= »I’_0(0)=0\ -> » class= »asciimath mathjax »>
» title= »I’_0(0)=0\ -> » class= »asciimath mathjax »> 
L’équation du déplacement de l’objet est donc
(-650/807 cos(13t)-6950/10491 sin(13t))")
Comme dans les scénarios de vibrations mécaniques forcées, le courant dans un circuit RLC est composé de deux parties distinctes : le courant transitoire, représenté par la solution complémentaire qui diminue à zéro à mesure que le temps progresse vers l’infini, et le courant en régime permanent, décrit par la solution particulière, qui est sinusoïdal et persiste dans le temps.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=184
 , d’un inducteur de
, d’un inducteur de  et d’un condensateur de
et d’un condensateur de alimenté par la tension
alimenté par la tension = 0,06sin(3t)V") . a) Rédige l’équation différentielle associée à ce circuit en termes de courant
. a) Rédige l’équation différentielle associée à ce circuit en termes de courant  . b) Si la charge initiale et le courant initial du condensateur sont tous les deux nuls, trouve le courant et les tensions aux bornes de la résistance en termes de temps .
. b) Si la charge initiale et le courant initial du condensateur sont tous les deux nuls, trouve le courant et les tensions aux bornes de la résistance en termes de temps . a) ")
b) =0,0205 e^(-31t)-0,1071 e^(-3t)+")
+0,08660cos(3t)")
c) =0,34(0,0205 e^(-31t)-0,1071 e^(-3t)+")
+0,08660cos(3t) )")
 , d’un inducteur de et d’un condensateur de
, d’un inducteur de et d’un condensateur de  alimenté par la tension
alimenté par la tension  = 0,09t^2\ V") . a) Rédige l’équation différentielle associée à ce circuit en termes de courant . b) Si la charge initiale et le courant initial du condensateur sont tous deux nuls, trouve le courant .
. a) Rédige l’équation différentielle associée à ce circuit en termes de courant . b) Si la charge initiale et le courant initial du condensateur sont tous deux nuls, trouve le courant . a) 
b) =e^(-t)(9/3721cos(11t)-540/40931sin(11t))+9/61t-9/3721")
IV
Description du chapitre
Ce chapitre est consacré à la transformée de Laplace, un opérateur intégral largement utilisé pour simplifier la résolution d’équations différentielles en les transformant en équations algébriques dans un domaine différent.
4.1 Définitions : cette section présente le concept et l’opérateur intégral de la transformée de Laplace.
4.2 Propriétés de la transformée de Laplace : cette section traite des grandes propriétés de la transformée de Laplace, essentielles pour une transformation et une manipulation efficaces des fonctions.
4.3 Transformée inverse de Laplace : cette section explique le processus de conversion des fonctions du domaine de Laplace vers le domaine d’origine, connu sous le nom de transformée inverse de Laplace.
4.4 Résolution de problèmes de valeur initiale : cette section démontre l’application de la transformée de la Place et de son inverse dans la résolution de problèmes de valeur initiale (PVI).
4.5 Transformée de Laplace de fonctions définies par morceaux : cette section explore l’application de la transformée de Laplace aux fonctions continues par morceaux, en utilisant des outils tels que la fonction de Heaviside (fonction échelon unité).
4.6 Résolution de problèmes de valeur initiale avec des fonctions de forçage définies par morceaux : cette section montre comment résoudre des PVI pour des équations différentielles du second ordre à coefficients constants et à fonctions de forçage continues par morceaux.
4.7 Fonction delta de Dirac (impulsion) : cette section présente la fonction delta de Dirac et son application à la résolution d’équations différentielles avec des fonctions de forçage impulsionnelles, qui sont caractérisées par des amplitudes élevées sur des intervalles très courts.
4.8 Table des transformées de Laplace : cette section présente un tableau résumant les transformées de Laplace et certaines de leurs propriétés pour une consultation rapide.
Oliver Heaviside, né en 1850 à Camden Town, à Londres, était un ingénieur en électricité, un mathématicien et un physicien autodidacte dont l’approche non conventionnelle du monde académique ne l’a pas empêché d’avoir un impact profond sur ce domaine. Largement autodidacte en raison de contraintes financières, Heaviside a poursuivi sa passion pour la théorie électromagnétique, apportant des contributions substantielles qui étaient à la fois novatrices et controversées en son temps. Sa réalisation la plus importante a été le développement du calcul opérationnel, un outil puissant dans l’application d’équations différentielles à des problèmes physiques, en particulier dans le domaine de l’ingénierie électrique. Les méthodes de Heaviside ont simplifié les équations complexes de l’électromagnétisme de Maxwell, les rendant plus accessibles et applicables dans la pratique, ce qui a eu un impact durable sur les télécommunications et sur l’ingénierie électrique. Malgré les critiques et la maigre reconnaissance dont il a fait l’objet de son vivant, le travail de Heaviside a été qualifié plus tard de révolutionnaire, influençant non seulement les fondements théoriques de l’ingénierie électrique, mais aussi les aspects pratiques de la transmission des signaux et de la conception des circuits. L’histoire d’Oliver Heaviside est une histoire de persévérance et d’intelligence, qui démontre qu’une quête incessante de connaissances peut conduire à des découvertes déterminantes pour le monde, hors de la voie académique conventionnelle.
17
Dans cette section, nous nous intéressons à un opérateur intégral connu sous le nom de transformée de Laplace. Ce puissant outil est employé pour convertir des problèmes de valeur initiale décrits par des équations différentielles dans un domaine (ex. : domaine t) en équations algébriques d’un autre domaine (domaine s). Il s’ensuit un processus de résolution plus efficace, en particulier pour les équations différentielles linéaires à coefficients constants et à termes de forçage discontinus ou impulsifs. Par exemple, considérons un problème de valeur initiale dans le domaine temporel
Domaine-t : +5y(t)=f(t),")
=10")
En appliquant la transformée de Laplace, l’équation différentielle est transformée en équation algébrique dans le domaine s :
Domaine-s : -10+5Y(s)")
")
La représentation algébrique dans le domaine s est souvent plus simple à résoudre, sachant que la solution peut être retransformée dans le domaine t d’origine.
Disons que ") est une fonction définie sur
est une fonction définie sur ") et que
et que  est un nombre réel. La transformée de Laplace de
est un nombre réel. La transformée de Laplace de  est la fonction
est la fonction  définie par l’intégrale
définie par l’intégrale
La transformée de Laplace de est dénotée à la fois par et par  . Les fonctions peuvent également être exprimées par une paire transformée
. Les fonctions peuvent également être exprimées par une paire transformée harrF(s)") .
.
L’intégrale impropre dans la définition 4.1.1 est plus précisément définie comme suit :
f(t)dt")
L’intégrale converge, c’est-à-dire qu’elle aboutit à un nombre fini lorsque cette limite existe et est finie.
Trouver la transformée de Laplace de la fonction constante =2") .
.
En remplaçant =1") dans l’intégrale 4.1.1 de la définition de la transformée de Laplace, on obtient
dans l’intégrale 4.1.1 de la définition de la transformée de Laplace, on obtient
=int_0^ooe^(-st)(2)dt")
On note que l’intégrale diverge pour <img src= »https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bee52be777a1b0a7e6e707ffd0e43122.png » alt= »s<=0″ title= »s, de sorte que le domaine de ") est
est  . Comme
. Comme  0″ title=
0″ title=  pour un fixe, on obtient alors
pour un fixe, on obtient alors
=2/s") for ou
for ou  comme paire transformée
comme paire transformée
En général, la transformée de Laplace de la fonction constante =C") est
est  .
.
Trouver la transformée de Laplace de la fonction =e^(at)") .
.
En remplaçant dans l’intégrale 4.1.1 de la définition de la transformée de Laplace, on obtient
=int_0^ooe^(-st)(e^(at))dt")
On note que l’intégrale diverge pour <img src= »https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ab75a1d6eefe2e3eaa551ed88dced657.png » alt= »s<=a » title= »s, de sorte que le domaine de est  . Par conséquent,
. Par conséquent,
=1/(s-a)") for ou
for ou harr1/(s-a)") comme paire transformée
comme paire transformée
En pratique, bien que la définition de la transformée de Laplace implique une intégrale, elle est rarement calculée directement par intégration en raison de la complexité et de la lenteur du processus. Au lieu de cela, nous utilisons généralement des tables précalculées de transformées de Laplace. Ces tables répertorient les fonctions courantes et leurs transformées correspondantes, ce qui permet une application rapide et précise de la transformée de Laplace pour résoudre des équations différentielles et analyser des systèmes. La table 4.1.1 recense la transformée de Laplace de certaines fonctions courantes. Une table plus complète figure à la section 4.8.
Table 4.1.1 : Table synthétique des transformées de Laplace
| | =") | Domaine de |
|  | |
| |  | |
  | /s^(n+1)") | |
") | ") | |
,") | /(s-a)^(n+1)") | |
") | ") | |
") | ") | |
sin(bt)") | ^2+b^2)") | |
cos(bt)") | /((s-a)^2+b^2)") | |
") | ") |  |
") | ") | |
Utiliser la table des transformées de Laplace pour déterminer la transformée de Laplace de la fonction suivante :
a) =sin(2t)")
b) =cos(5t)")
a) À partir de la table
}")
") pour
pour
Sachant que  , la transformée est
, la transformée est
}")
") pour
pour 
b) À partir de la table
}")
") pour
pour
Sachant que  , la transformée est
, la transformée est
}")
") pour
pour
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=210
, de la fonction  = e^(4t) , quad t gt 0") .
. =1/(s-4)")
, de la fonction  = cos(4t) , quad t gt 0") .
. =s/(s^2+4^2)")
=6 cosh(2 t)")
 .
. =(6s)/(s^2-2^2)")
18
Il est essentiel de comprendre les propriétés de la transformée de Laplace, car elle fournit des outils permettant de transformer et de manipuler efficacement les fonctions. Ces propriétés simplifient grandement l’analyse et la résolution des équations différentielles et des systèmes complexes.
La transformée de Laplace existe pour toute fonction qui est (1) continue par morceaux et (2) d’ordre exponentiel (c’est-à-dire qui ne croît pas plus vite qu’une fonction exponentielle). Une fonction est dite d’ordre exponentiel  s’il existe des constantes positives
s’il existe des constantes positives  et si
et si  , de sorte que <img src= »https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/691166b3801d130b71532d250417670b.png » alt= »|f(t)|<=Me^(at), » title= »|f(t)| pour tous les
, de sorte que <img src= »https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/691166b3801d130b71532d250417670b.png » alt= »|f(t)|<=Me^(at), » title= »|f(t)| pour tous les  =t_0″ title= »t>=t_0″ class= »asciimath mathjax »>. Par exemple,
=t_0″ title= »t>=t_0″ class= »asciimath mathjax »>. Par exemple, =e^(7t)cos(4t)") est d’ordre exponentiel 7, mais
est d’ordre exponentiel 7, mais =e^(t^3)") n’est pas d’ordre exponentiel.
n’est pas d’ordre exponentiel.
La transformée de Laplace obéit au principe de linéarité. Disons que  et
et  sont des fonctions pour lesquelles existe la transformée de Laplace
sont des fonctions pour lesquelles existe la transformée de Laplace  s_0″ title= »s>s_0″ class= »asciimath mathjax »> et que et sont des constantes. Alors, pour s_0″ title= »s>s_0″ class= »asciimath mathjax »>, la transformée de Laplace d’une combinaison linéaire de ces fonctions est donnée par :
s_0″ title= »s>s_0″ class= »asciimath mathjax »> et que et sont des constantes. Alors, pour s_0″ title= »s>s_0″ class= »asciimath mathjax »>, la transformée de Laplace d’une combinaison linéaire de ces fonctions est donnée par :

Cette propriété est utile avec les combinaisons linéaires de fonctions.
Utiliser la table des transformées de Laplace et la propriété de linéarité pour déterminer
-6cos(4t)+9t^2}") .
.
1. À partir de la table
}")
)=")
") pour
pour  -3″ title= »s> -3″ class= »asciimath mathjax »>
-3″ title= »s> -3″ class= »asciimath mathjax »>
}")
=s/(s^2+16)") pour 0″ title= »s> 0″ class= »asciimath mathjax »>
pour 0″ title= »s> 0″ class= »asciimath mathjax »>

/(s^(2+1))=2/(s^3)") pour 0″ title= »s> 0″ class= »asciimath mathjax »>
pour 0″ title= »s> 0″ class= »asciimath mathjax »>
2. À partir du théorème de linéarité, on a
-6cos(4t)+9t^2 }=")
}-6\mathcal{L} {cos(4t)}+9\mathcal{L} { t^2}")
)-")
 )+9(2/(s^3) )")
-")
/(s^2+16)+18/(s^3)") pour 0″ title= »s>0″ class= »asciimath mathjax »>
pour 0″ title= »s>0″ class= »asciimath mathjax »>
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=215
Si = \mathcal{L}{f(t)}") , alors
, alors

f(t)}=F(s-a)")
Ce théorème est très utile pour résoudre des équations différentielles avec des termes exponentiels ou pour analyser des systèmes avec des entrées exponentielles.
Utiliser le premier théorème du déplacement et la propriété de linéarité pour déterminer
sin(7t)+8t^3 e^(-6t)}") .
.
Avec le premier théorème du déplacement, on a
1. Dans sin(7t)}") ,
, =sin(7t)") et le coefficient dans l’exposant du terme exponentiel est
et le coefficient dans l’exposant du terme exponentiel est  .
.
=\mathcal{L}{sin(7t)}")
") pour 0″ title= »s>0″ class= »asciimath mathjax »>
pour 0″ title= »s>0″ class= »asciimath mathjax »>
En déplaçant , on remplace par 
sin(7t)}=F(s-9)")
^2+7^2)") pour
pour  9″ title= »s>9″ class= »asciimath mathjax »>
9″ title= »s>9″ class= »asciimath mathjax »>
2. Dans )}") ,
, =t^3") et le coefficient dans l’exposant du terme exponentiel est
et le coefficient dans l’exposant du terme exponentiel est  .
.
=\mathcal{L}{t^3}")
/(s^(3+1))=(3!)/(s^4)") pour 0″ title= »s>0″ class= »asciimath mathjax »>
pour 0″ title= »s>0″ class= »asciimath mathjax »>
En déplaçant , on remplace par .")
)}=F(s+6)")
^4)") pour
pour  -6″ title= »s> -6″ class= »asciimath mathjax »>
-6″ title= »s> -6″ class= »asciimath mathjax »>
3. À partir du théorème de linéarité, on a
sin(7t)}")
}")
^2+49))")
^4)")
^2+49)")
^4") pour 9″ title= »s>9″ class= »asciimath mathjax »>
pour 9″ title= »s>9″ class= »asciimath mathjax »>
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=215
Il faut absolument savoir transformer les dérivées pour résoudre efficacement des équations différentielles. Cette propriété permet d’exprimer la transformée de Laplace de la dérivée d’une fonction en termes de transformée de la fonction originale. Pour une fonction avec des dérivées continues jusqu’au  ordre,
ordre,
} = sF(s) - f(0)")
\} = s^2F(s) - s f(0) - f'(0)")

}(t)\} =")
 - s^{n-1}f(0) - \cdots - f^{(n-1)}(0)")
Comme nous traiterons principalement d’équations différentielles du second ordre, nous nous concentrerons sur la transformée de Laplace des dérivées première et seconde.
Pour la fonction =sin(3t)") , montrer que .
, montrer que .
Identifier la dérivée et la valeur initiale :
» title= »-> » class= »asciimath mathjax »> =3cos(3t)") et
et
=sin(0)=0")
Trouver les transformées de Laplace :
À partir de la table des transformées de Laplace, on a
}=s/(s^2+3^2)")
}=3/(s^2+3^2)")
Appliquer la propriété de différenciation :
Il faut montrer
 } = s \mathcal{L}{sin(3t) } - sin(0)")
En introduisant les transformées et la valeur initiale, on obtient
)=s(3/(s^2+3^2))-0")
Et, en simplifiant les deux côtés, on a
/(s^2+3^2)=(3s)/(s^2+3^2")
Cette égalité confirme la propriété de différenciation, puisque les deux côtés sont identiques.
Trouver la transformée de Laplace de étant donné les conditions initiales =-3") et
et =1") . Utiliser
. Utiliser  pour
pour  .
.
À partir de la propriété de différenciation, on a
-y(0)")
En insérant les conditions initiales et , on obtient

Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=215
La table 4.2.1 résume les propriétés ci-dessus de la transformée de Laplace. Ces propriétés sont cruciales pour simplifier les calculs et utiliser efficacement la transformée de Laplace dans la résolution des problèmes de valeur initiale.
Table 4.2.1 : Propriétés de la transformée de Laplace
| Propriété | Exemple |
  | }")  }") ") |
  pour n’importe quelle constante pour n’importe quelle constante |   ") |
f}(s)") ") | sin(5t) }") ^2+5^2)") |
 ") | |
 -f'(0)") | |
}") ^n (d^n)/(ds^n)(\mathcal{L}{f})") | }") ^1 (d)/(ds)(\mathcal{L}{sin(7t)})") (7/(s^2+7^2))") /(s^2+49)^2") |
=-3t^5+9sin(t), \ t gt 0") .
. =-360/s^(6)+9/(s^2+1),\ sgt0")
, de la fonction =")
sin(t), \ t gt 0") .
.
=10/((s - 1)^2+1),\ sgt1")
compte tenu des conditions initiales =4") et
et =-2") .
. 
19
Dans les sections précédentes, nous avons défini la transformée de Laplace comme un opérateur intégral capable de représenter une fonction et ses dérivées dans une équation différentielle en une équation algébrique en termes de et de fonction . Pour résoudre des équations différentielles, il faut souvent obtenir à partir de sa transformée afin de résoudre le problème de valeur initiale d’origine. Ce processus est facilité par la transformée inverse de Laplace.
En règle générale, la formule d’inversion formelle n’est pas directement utilisée en raison de sa complexité. Au lieu de cela, on fait appel aux tables de transformées de Laplace pour trouver les transformées inverses de obtenues à partir du problème d’origine. La transformée inverse de Laplace est représentée par

Tout comme la transformée de Laplace, l’opération inverse est linéaire. Si  et
et  sont des fonctions dans le domaine s avec des constantes et , de sorte que la transformée inverse de Laplace d’une combinaison linéaire de et pour est donnée par
sont des fonctions dans le domaine s avec des constantes et , de sorte que la transformée inverse de Laplace d’une combinaison linéaire de et pour est donnée par
{c_1F_1+c_2F_2}=c_1\mathcal{L}^(-1){F_1}+c_2\mathcal{L}^(-1){F_2}")
Cette propriété garantit que le processus de recherche de la transformée inverse d’une expression compliquée peut souvent être décomposé en parties plus simples et plus faciles à gérer.
Déterminer {5/(s+7)+(8s)/ (s^2+16)}") .
.
À partir de la table 4.1
\ harr\ 1/(s+7)") et
et \ harr\ s/(s^2+4^2)")
À partir de la linéarité, on obtient donc
{1/(s+7)}")
{s/ (s^2+16)}")
À partir de la table des transformées de Laplace, on obtient
+8cos(4t)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=217
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=217
Dans le processus de recherche de la transformée de Laplace inverse, on rencontre souvent la fonction rationnelle sous la forme
=(P(s))/(Q(s))")
Ici, ") et
et ") sont des polynômes. Pour s’assurer que représente une transformée de Laplace valide, on considère généralement des cas où le degré de est inférieur à celui de , car on peut montrer que est une transformée de Laplace si
sont des polynômes. Pour s’assurer que représente une transformée de Laplace valide, on considère généralement des cas où le degré de est inférieur à celui de , car on peut montrer que est une transformée de Laplace si  . Cette condition est souvent appelée condition de régularité d’une fonction rationnelle dans le domaine de Laplace.
. Cette condition est souvent appelée condition de régularité d’une fonction rationnelle dans le domaine de Laplace.
Dans ce cas, la recherche de l’inverse peut nécessiter de compléter le carré du dénominateur ou d’effectuer un développement partiel de la fraction, une technique similaire à celle utilisée dans le calcul intégral. Ces techniques sont particulièrement nécessaires lorsque l’on tente de faire correspondre à une transformée inversée connue à partir de tables standard. Le choix entre la complétion du carré et la décomposition en fractions partielles dépend de la nature et de la composition du dénominateur .
est factorisable en facteurs linéaires ou quadratiques irréductibles. Cette technique décompose les expressions rationnelles complexes en parties plus simples, ce qui facilite la recherche de la transformée inverse de Laplace pour chaque terme individuel. comporte des termes quadratiques qui ne se factorisent pas en termes linéaires réels, ce qui indique souvent des racines complexes.Pour illustrer ces méthodes, voici quelques exemples montrant comment appliquer ces techniques pour trouver la transformée inverse de Laplace de diverses fonctions.
Trouver la transformée inverse de Laplace
")
Le dénominateur n’est pas factorisable. On doit donc essayer de compléter le carré :


^2+16")
^2+4^2")
À partir de la table 4.1, on voit que
 sin(bt)")
Ainsi, et  . Pour pouvoir utiliser la transformée inverse ci-dessus, il faut créer un 4 dans le numérateur. On multiplie donc le numérateur et le dénominateur de la fonction d’origine par 4. On obtient
. Pour pouvoir utiliser la transformée inverse ci-dessus, il faut créer un 4 dans le numérateur. On multiplie donc le numérateur et le dénominateur de la fonction d’origine par 4. On obtient
^2+4^2))")
On peut maintenant utiliser l’inverse de la table
 }")
^2+4^2)}")
 \ sin(4t)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=217
Trouver la transformée inverse de Laplace
/((s-2)^2(s+1))")
Dans le dénominateur, on a un facteur linéaire répété  de multiplicité deux et un facteur linéaire non répété
de multiplicité deux et un facteur linéaire non répété  . Cette composition nous conduit à structurer la décomposition en fractions partielles comme suit :
. Cette composition nous conduit à structurer la décomposition en fractions partielles comme suit :
+B/(s-2)^2+C/(s+1)")
Une façon de trouver les constantes A, B et C consiste à multiplier les deux côtés de l’égalité par ^2(s+1)") afin d’éliminer les dénominateurs :
afin d’éliminer les dénominateurs :
(s+1)+B(s+1)+C(s-2)^2")
On peut alors trouver la valeur des constantes en mettant en équation les coefficients de termes similaires des deux côtés. Cela forme un système d’équations.
Une autre méthode, souvent plus simple, consiste à choisir stratégiquement des valeurs pour qui simplifient l’équation et isolent chacune des constantes. Par exemple :
Pour B : soit  , ce qui annule les termes avec A et C et conduit à :
, ce qui annule les termes avec A et C et conduit à :
-5=A(2-2)(2+1)+B(2+1)+C(2-2)^2")


Pour C : soit  , ce qui simplifie l’équation pour trouver la valeur de C :
, ce qui simplifie l’équation pour trouver la valeur de C :
^2-(-1)-5=A(-1-2)(-1+1)-(-1+1)+C(-1-2)^2")


Pour A : choisir un différent, par exemple  , pour isoler et trouver la valeur de A :
, pour isoler et trouver la valeur de A :
(1)-(1)-1/3(-2)^2")



Avec , , et , la fraction partielle devient
/((s-2)^2(s+1)) }")
)-1/(s-2)^2-1/3(1/(s+1))}")
Avec la linéarité, la transformée inverse de Laplace est
}-\mathcal{L}^-1{1/(s-2)^2}")
}")
Et, en se référant à la table des transformées inversés, on a
") et
et ")
En appliquant cela avec  pour les deux premiers termes et pour le dernier terme, on obtient
pour les deux premiers termes et pour le dernier terme, on obtient
-t e^(2t)-1/3e^(-t)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=217
=(-s-6)/(s^2+49),\ s gt 0") .
. =-cos(7t)-6/7sin(7t)")
 = (-7s-2)/(s^2+s-2).")
=-4 e^(-2t)-3 e^(t)")
 = \mathcal{L}{y}") est
est  = 16/((s-7)^2+16)+(-5s)/(s^2+9)+8/(s^2+16)")
Trouve la transformée inverse de Laplace de =\mathcal{L}^-1{Y(s)}") .
.
=4 e^(7t)sin(4t)-5cos(3t)+2sin(4t)")
20
Maintenant que nous avons vu la transformée de Laplace, son inverse et ses propriétés, nous sommes en mesure de résoudre des problèmes de valeur initiale (PVI) pour des équations différentielles linéaires. Nous nous concentrerons sur les équations différentielles linéaires du second ordre à coefficients constants.
Approche générale :
1. Appliquer la transformée de Laplace pour chaque terme de l’équation différentielle. Utiliser les propriétés de la transformée de Laplace indiquées dans les tables 4.1 et 4.2 afin d’obtenir une équation en termes de ") . Les transformées de Laplace des dérivées sont
. Les transformées de Laplace des dérivées sont
2. Les transformées des dérivées impliquent des conditions initiales à  . Appliquer les conditions initiales.
. Appliquer les conditions initiales.
3. Simplifier l’équation transformée pour isoler .
4. Au besoin, utiliser la décomposition en fractions partielles pour décomposer en composants plus simples.
5. Déterminer la transformée inverse de Laplace au moyen des tables et de la propriété de linéarité pour trouver .
Approche abrégée :
1. Trouver la caractéristique polynomiale de l’équation différentielle =as^2+bs+c") .
.
2. Remplacer ") ,
, =\mathcal{L}{f(t)}") et les conditions initiales dans l’équation
et les conditions initiales dans l’équation
3. Au besoin, utiliser la décomposition en fractions partielles pour décomposer en composants plus simples.
4. Déterminer la transformée inverse de Laplace au moyen des tables et de la propriété de linéarité pour trouver .
Résoudre le problème de valeur initiale
\ ;")
=-1, \ y'(0)=2")
Approche générale
1. Prendre la transformée de Laplace des deux côtés de l’équation
}")
Si =\mathcal{L}^-1{y}") , on obtient
, on obtient
-sy(0)-y'(0)-5(sY(s)-y(0))+6Y(s)=4(1/(s+2))")
2. Introduire dans les conditions initiales pour obtenir
+s-2-5(sY(s)+1)+6Y(s)=4(1/(s+2))")
3. Rassembler des termes similaires et isoler pour obtenir
Y(s)=4/(s+2)-s+7")
-s+7)/(s^2-5s+6)")
Multiplier le dénominateur et le numérateur par ") et factoriser le dénominateur pour obtenir
et factoriser le dénominateur pour obtenir
=(-s^2+5s+18)/((s+2)(s-3)(s-2))")
4. Décomposer en fractions partielles pour obtenir
=1/5 (1/(s+2))+24/5 (1/(s-3))-6 (1/(s-2))")
5. À partir de la table 4.1, on voit que
En prenant l’inverse, on obtient la solution de l’équation
 +24/5 e^(3t)-6 e^(2t)")
Résoudre le problème de valeur initiale
 \ ;")
=1, \ y'(0)=-1")
Approche abrégée :
1. Le polynôme caractéristique est
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=219
 = -1, \ quad y'(0) = 2")
=-3/7 e^(2t)-4/7 e^(-5t)")
 = 2, \ quad y'(0) = 0")
=e^(-3t)(2cos(2t)+3sin(2t))")
 = 1, \ quad y'(0) = -1")
=e^(4t)(1-5t)")
21
Dans cette section, nous explorons l’application des transformées de Laplace à des fonctions continues par morceaux. Dans la section suivante, nous tâcherons de résoudre des problèmes de valeur initiale impliquant des équations différentielles du second ordre à coefficients constants où la fonction de forçage est une fonction continue par morceaux.
Les discontinuités à saut fini se produisent souvent dans des situations physiques telles que des mécanismes de commutation ou des changements brusques de forces agissant sur le système. Pour traiter ces discontinuités dans le domaine de Laplace, nous utilisons la fonction échelon unité pour transformer des fonctions définies par morceaux en une forme adaptée aux transformées de Laplace et trouver ensuite des inverses continues par morceaux des transformées de Laplace pour la solution.
La fonction échelon unité (ou fonction de Heaviside) ") est définie comme suit :
est définie comme suit :
 = {(0,t lt 0),(1,t ge 0):}")
Elle passe de 0 à 1 par échelons (ou sauts) à . En déplaçant l’argument , on peut déplacer l’échelon à différents endroits.
 = {(0,t-a lt 0),(1,t-a ge 0):}") » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> =u(t-a) = {(0,t lt a ),(1,t ge a ):}")
La fonction en escalier peut également être transformée, par exemple déplacée, étendue ou comprimée. Par exemple, en multipliant par une constante  , on peut l’étendre verticalement.
, on peut l’étendre verticalement.
 = {(0,t lt a ),(M,t ge a ):}")
Ou en combinant le déplacement et la réflexion de , on peut opposer la permutation de la fonction.
 = {(1,t lt a ),(0,t ge a ):}")
La fonction en escalier permet de représenter aisément n’importe quelle fonction continue par morceaux. Par exemple, prenons la fonction
 = {(f_0(t), \ 0 le t lt a),(f_1(t), t ge a):}")
{(1, \ 0 le t lt a),(0, t ge a):}")
{(0, \ 0 le t lt a),(1, t ge a):}")
(1-u(t-a))+f_1(t)u(t-a)")
Elle peut être réécrite sous la forme
On peut étendre l’équation de la section 4.5.1 à des fonctions continues par morceaux plus générales.
 = {(f_0(t), \ 0 le t lt a),(f_1(t), a le t lt b), (f_2(t), t ge b) :}")
= f_0(t) + u(t-a)(f_1(t)-f_0(t))")
(f_2(t)-f_1(t))") (4.5.2)
(4.5.2)
La transformée de Laplace de la fonction modulée par échelons est essentielle pour résoudre les équations différentielles avec des fonctions de forçage définies par morceaux.
Théorème : transformée de Laplace d’une fonction modulée par échelons. Soit ") défini sur et
défini sur et  , supposons que
, supposons que }") existe pour
existe pour  . Alors,
. Alors,
Ce théorème permet la transformation de fonctions modulées par échelons dans le domaine de Laplace, qui peut alors être manipulé algébriquement.
Trouver la transformée de Laplace de 3t^2") .
.
Trouver la transformée de Laplace de
 = {(2t-1, \ \ 0 le t lt 2),(4t, t ge 2):}")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=221
Le théorème précédent permet également de déterminer la transformée inverse de Laplace des fonctions issues de fonctions définies par morceaux. Cependant, il sera plus pratique de déplacer l’argument de et de remplacer avec ") .
.
Théorème de translation en . Si et si ") existe pour , alors
existe pour , alors
g(t-a)}=e^(-as)\mathcal{L}{g(t)}")
Étant donné que =\mathcal{L}{g(t)}") , c’est équivalent à
, c’est équivalent à
Trouver la transformée inverse de Laplace de la fonction donnée et trouver des formules distinctes pour ") aux intervalles appropriés.
aux intervalles appropriés.
=2/s-s/(s^2+1)+e^(-pi/2 s)((s-1)/(s^2+1))")
Comme ") a
a ") comme facteur, il faut utiliser l’équation 4.5.4 pour déterminer l’inverse.
comme facteur, il faut utiliser l’équation 4.5.4 pour déterminer l’inverse.
Avec =2/s-s/(s^2+1)") et
et =(s-1)/(s^2+1)") , on obtient
, on obtient
=\mathcal{L}^-1{2/s-s/(s^2+1) }")
")
=\mathcal{L}^-1{s/(s^2+1) -1/(s^2+1) }")
-sin(t)")
En utilisant l’équation 4.5.4 avec  et une linéarité de
et une linéarité de  , on a
, on a
=")
}")
H_1(s)}")
")
(h_1(t-pi/2))")
(cos(t-pi/2)-sin(t-pi/2))")
On peut simplifier en utilisant des identités trigonométriques : =sin(t)") et
et =-cos(t)") . L’application de ces identités donne
. L’application de ces identités donne
=2-cos(t)")
(sin(t)+cos(t))")
Grâce à l’équation 4.5.1, on sait que
") , correspond à
, correspond à ") , la fonction active avant l’échelon.
, la fonction active avant l’échelon.+cos(t)") , représente le changement dans la fonction à l’échelon, correspondant donc à
, représente le changement dans la fonction à l’échelon, correspondant donc à  .
.Étant donné que =2-cos(t)") , il est possible de trouver la valeur de
, il est possible de trouver la valeur de ") .
.
+cos(t)")
 )=sin(t)+cos(t)")
=sin(t)+2")
On peut maintenant exprimer comme une fonction définie par morceaux.
 = {(2-cos(t), \ \ 0 le t lt pi/2),(sin(t)+2, t ge pi/2):}")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=221
, de .  = {(0,"si",t lt 3),(2 (t-3),"si",3 le t lt 7),(8,"si",t gt 7):}.")
=(2 e^(-3s))/s^2-(2 e^(-7s))/s^2")
. Entre ") pour
pour ") si la fonction unité est une partie de l’inverse.
si la fonction unité est une partie de l’inverse. =e^(-2s)/(s^2+4s+8)")
=1/2sin(2(t-2))e^(-2(t-2))u_2(t)")
.  u_2(t) - 4 (t-3) u_3(t), \quad y(0) = y'(0) = 0")
=(4 e^(-2s)-4 e^(-3s))/(s^2(s^2+9))")
22
Dans la section suivante, nous abordons les problèmes de valeur initiale (PVI) pour des équations différentielles du second ordre à coefficients constants lorsque la fonction de forçage est une fonction continue par morceaux.
\;")
=k_0, \ \ y'(0)=k_1")
1. Écrire la fonction de forçage définie par morceaux en termes de fonction en escalier.
2. Déterminer la transformée de Laplace de l’équation différentielle.
3. Résoudre l’équation transformée pour .
4. Utiliser les tables de transformées de Laplace et le théorème de translation vus dans les sections précédentes pour déterminer la transformée inverse de Laplace.
5. Au besoin, réécrire sous forme définie par morceaux.
Résoudre le problème de valeur initiale donné.

,")
=0,")
=4")
1. La fonction de forçage est déjà sous la forme modulée par échelons, avec =u(t-2)") .
.
2. En prenant la transformée de Laplace de l’équation, on a


}")
Soit =\mathcal{L}{y}") et sachant que
et sachant que }=e^(-2s)\mathcal{L}{t+2}") (application de l’équation de la section 4.5.3), on obtient
(application de l’équation de la section 4.5.3), on obtient
-sy(0)-y'(0)-3(sY(s)-y(0))-10Y(s)=5/s-3e^(-2s)(1/s^2+2/s)")
En appliquant les conditions initiales, on obtient
-4-3sY(s)-10Y(s)=5/s-3e^(-2s)(1/s^2+2/s)")
3. La résolution pour donne
Y(s)=5/s-3e^(-2s)(1/s^2+2/s)+4")
=5/(s(s^2-3s-10) )-(3e^(-2s))/(s^2(s^2-3s-10) ) -(6e^(-2s))/(s(s^2-3s-10) )+4/(s^2-3s-10)")
=1/(s^2-3s-10 )(4)+ 1/(s(s^2-3s-10) )(5-6e^(-2s)) +")
 )(-3e^(-2s) )")
En factorisant les dénominateurs, on obtient
=1/((s+2)(s-5) )(4) +1/(s(s+2)(s-5) )(5-6e^(-2s))+")
(s-5) )(-3e^(-2s))")
4. Pour trouver , on note que
=4F(s)+(5-6e^(-2s))G(s)+(-3e^(-2s)) H(s)")
où
=1/((s+2)(s-5) )")
)+1/7(1/(s-5))")
=1/(s(s+2)(s-5) )")
+1/14(1/(s+2))+1/35(1/(s-5))")
=1/(s^2(s+2)(s-5) )")
-1/10(1/s^2) -1/28(1/(s+2))+1/175(1/(s-5))")
En calculant la transformée inverse de Laplace de , ") et , on obtient
et , on obtient
=\mathcal{L}^-1{F(s)}")
+1/7e^(5t)")
=\mathcal{L}^-1{G(s)}")
+1/35e^(5t)")
=\mathcal{L}^-1{H(s)}")
/10-1/28e^(-2t)+1/175e^(5t)")
Pour faciliter le processus d’inversion, on réécrit d’abord .
=4F(s)+5G(s)-3e^(-2s)(2G(s)+H(s))")
En prenant la transformée inverse et en appliquant le théorème de translation pour les termes avec le terme exponentiel, on obtient
=\mathcal{L}^-1{Y(s)} =")
} +5\mathcal{L}^-1{G(s)}")
(2G(s)+H(s)) }")
+5g(t)-3u(t-2)(2g(t-2)+h(t-2))")
+1/7e^(5t))")
+1/35e^(5t))-")
![3u_2(t)[2(-1/10+1/14e^(-2(t-2))+1/35e^(5(t-2)))+(3/100-(t-2)/10-1/28e^(-2(t-2))+1/175e^(5(t-2)))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/596f76ddc59a249d749de6abf59be83f.png "3u_2(t)[2(-1/10+1/14e^(-2(t-2))+1/35e^(5(t-2)))+(3/100-(t-2)/10-1/28e^(-2(t-2))+1/175e^(5(t-2)))]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=223
Le courant dans un circuit série  est régi par le problème de valeur initiale suivant. Déterminer le courant en termes de .
est régi par le problème de valeur initiale suivant. Déterminer le courant en termes de .
+9I(t)")
,(-1 \ \ \ 1lttlt2) ,(0 \ \ \ \ \ \ \ \ \ 2ltt):}")
=0,")
=0")
1. La fonction de forçage peut être écrite en termes de fonction en escalier sous la forme
= 1 + u(t-1)(-1-1)")
(0-(-1))")
+u(t-2)")
2. En prenant la transformée de Laplace de l’équation, on a


+u(t-2)}")
Si =\mathcal{L}{I}") , on obtient
, on obtient
+9J(s)=1/s-(2e^-s)/s+e^(-2s)/s")
3. La solution pour ") donne
donne
=1/(s(s^2+9))-(2e^-s)/(s(s^2+9))+e^(-2s)/(s(s^2+9))")
4. Pour trouver =\mathcal{L}^-1{J(s)}") , on note que
, on note que
=G(s)-2e^-sG(s)+e^(-2s)G(s)")
où
=1/(s(s^2+9))")
-1/9(s/(s^2+9))")
En calculant le transformée inverse de Laplace de , on obtient
")
En appliquant le théorème de translation, on obtient
}")
}")
G(s)}")
-2g(t-1)u(t-1)+g(t-2)u(t-2)")
)")
))u(t-1)")
))u(t-2)")
5. Ce résultat peut être écrit sous la forme de la fonction définie par morceaux
-1\ quad\ \ \ 0lttlt1),(1+cos(3t)-2cos(3t-3) \ \ \ 1lttlt2) ,(cos(3t)-2cos(3t-3)+cos(3t-6) \ \ tgt2):}")
La figure ci-dessous représente le graphique du courant .
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=223
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=223
 .
. ,(0,t ge 3 or t lt 2):}\ ,")
 = y'(0) = 0")
=3/26(1-e^(-5(t-2))cos(t-2)-5 e^(-5(t-2))sin(t-2))")
,(0,t ge 6):}, \quad\ y(0) = y'(0) = 0")
présente la forme  = f(t) - g(t) u_6(t)") . Trouve les fonctions et .
. Trouve les fonctions et .
=1/6+1/3 e^(3t)-1/2 e^(2t)")
=1/6+1/3 e^(3(t-6))-1/2 e^(2(t-6))")
,(0,t ge 9):}, \quad \ y(0) = y'(0) = 0")
présente la forme  = f(t) - g(t) u_9(t)") . Trouve les fonctions et .
. Trouve les fonctions et .
=1/2+1/2 e^(2t)-e^(t)")
=1/2+1/2 e^(2(t-9))-e^((t-9))")
23
Dans les sections précédentes, nous avons exploré des problèmes de valeur initiale pour des équations différentielles du second ordre à coefficients constants, en nous concentrant sur les cas où la fonction de forçage, , est soit continue, soit continue par morceaux sur l’intervalle ") .
.
\ ;")
Intéressons-nous maintenant à un autre type de fonction de forçage : celle qui représente une force d’impulsion. Les forces d’impulsion se caractérisent par des amplitudes très importantes sur des intervalles de temps extrêmement courts, à la façon d’une brusque « secousse » ou d’un « pic » soudain dans le système. De telles impulsions se produisent dans divers contextes, notamment dans les circuits électriques lors de l’activation, dans les systèmes mécaniques lors d’une collision ou dans tout scénario où une force soudaine et importante est appliquée pendant une brève période.
Pour modéliser mathématiquement ces forces d’impulsion, on utilise la fonction delta de Dirac, à savoir ") . La fonction delta de Dirac n’est pas une fonction au sens traditionnel du terme, mais plutôt une fonction généralisée ou une distribution dotée des propriétés suivantes.
. La fonction delta de Dirac n’est pas une fonction au sens traditionnel du terme, mais plutôt une fonction généralisée ou une distribution dotée des propriétés suivantes.
1. Nulle partout sauf en 0 :
={(0 \ si\ t!=0),(oo \ si \ t=0):}")
2. Intégrale égale à 1 :
 = 1")
3. Propriété de criblage :
 delta(t) = f(0)") pour toute fonction qui est continue sur l’intervalle contenant
pour toute fonction qui est continue sur l’intervalle contenant
En déplaçant l’argument dans , il est possible de modéliser les impulsions qui se produisent à des instants autres que . La fonction delta de Dirac déplacée, ") , marque un pic à
, marque un pic à  et est définie comme suit :
et est définie comme suit :
={(0 \si \ t!=a),(oo \si \ t=a):}")
La propriété de criblage s’étend donc à
4. Criblage en :
 delta(t-a) = f(a)") pour toute fonction qui est continue sur l’intervalle contenant
pour toute fonction qui est continue sur l’intervalle contenant
La transformée de Laplace offre une moyen pratique traiter la fonction Delta de Dirac dans le cadre de la résolution d’équations différentielles. La transformée d’une fonction delta de Dirac déplacée est donnée par
Il importe de comprendre la fonction Delta de Dirac et ses propriétés pour modéliser et analyser des systèmes soumis à des forces d’impulsion.
Trouver la solution du problème de valeur initiale
,")
=1,")
=0")
En prenant la transformée de Laplace de l’équation et en appliquant l’équation de la section 4.7.1 avec  à la fonction delta, on obtient
à la fonction delta, on obtient
-s+16Y(s)=4e^(-pis)")
La résolution pour donne
=(4e^(-pis) +s)/(s^2+16)")
 4/(s^2+16)+s/(s^2+16)")
En calculant la transformée inverse de Laplace, on obtient
=u(t-pi) sin(4(t-pi))")
")
Ce qui est équivalent à


La figure ci-dessous montre . La force d’impulsion est appliquée et ajoute de l’élan au système en  . Pour comparaison, la ligne en pointillés représente le système non perturbé.
. Pour comparaison, la ligne en pointillés représente le système non perturbé.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=225
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=225
, \quad \ y(0) = y'(0) = 0.")
 + delta(t-7), \quad \ y(0) = 11,\ y'(0) = 32")

24
Cette section décrit brièvement l’utilisation pratique de la transformée de Laplace dans le domaine du génie électrique pour résoudre des équations différentielles et des systèmes d’équations différentielles associés à des circuits électriques. La transformée de Laplace est particulièrement utile pour convertir ces équations différentielles en formes algébriques plus faciles à gérer.
Commençons par un problème de valeur initiale (PVI) issu d’un circuit RLC de base. Nous démontrons comment la transformée de Laplace peut simplifier la recherche du courant du circuit en fonction du temps en traduisant une équation différentielle en une équation algébrique.
Prenons un circuit série RLC avec une résistance de , un inducteur de et un condensateur de alimenté par une source de tension de . Au départ, le courant et la charge sur le condensateur sont nuls. Déterminer le courant dans le circuit en fonction du temps.
Informations données :
=0")
=I'(0)=0")
Dans l’exemple 3.9.1, nous avons développé le problème de valeur initiale régissant ce circuit RLC.
En appliquant la transformée de Laplace à l’équation différentielle, on trouve
/(s^2+10^2)")
Si }=J(s)") , on a
, on a
-sI(0)-I'(0)=s^2J(s)")
-sI(0)=sJ(s)")
Comme et ") sont tous deux nuls, l’équation peut être simplifiée en
sont tous deux nuls, l’équation peut être simplifiée en
+6sJ(s)+178J(s)=(100s)/(s^2+10^2)")
En résolvant, on trouve
=(100s)/((s^2+10^2)(s^2+6s+178))")
En décomposant en fractions partielles, on obtient
=1/807((650s+5000)/(s^2+10^2))-")
/(s^2+6s+178))")
Pour simplifier la seconde fraction, il faut compléter le carré.
=650/807(s/(s^2+10^2))+5000/807(1/(s^2+10^2)) -")
^2+13^2)) -")
^2+13^2))")
En appliquant la transformée inverse de Laplace à , on obtient le courant .
=650/807cos(10t)+500/807sin(10t)+")
(-650/807cos(13t)-6950/10491sin(13t))")
Ce résultat est conforme à celui que nous avons obtenu dans l’exemple 3.9.1 en résolvant le problème de valeur initiale au moyen de la méthode des coefficients indéterminés.
La transformée de Laplace peut être appliquée pour transformer certains systèmes d’équations différentielles avec valeurs initiales en systèmes d’équations algébriques dans le domaine s. La résolution de ces équations algébriques permet de trouver des fonctions de , que l’on peut ensuite reconvertir en solutions dans le domaine temporel à l’aide de la transformée inverse de Laplace. Nous aborderons ensuite un exemple plus complexe impliquant un circuit série-parallèle RL, qui se traduit par un système d’équations différentielles.
a) Pour le schéma de circuit électrique donné, déterminer le système d’équations différentielles qui décrit les courants dans les différentes branches du circuit. Supposons que tous les courants initiaux sont nuls. b) Une fois que le système d’équations différentielles et les conditions initiales sont établis, résoudre le système pour les courants dans chaque branche du circuit.
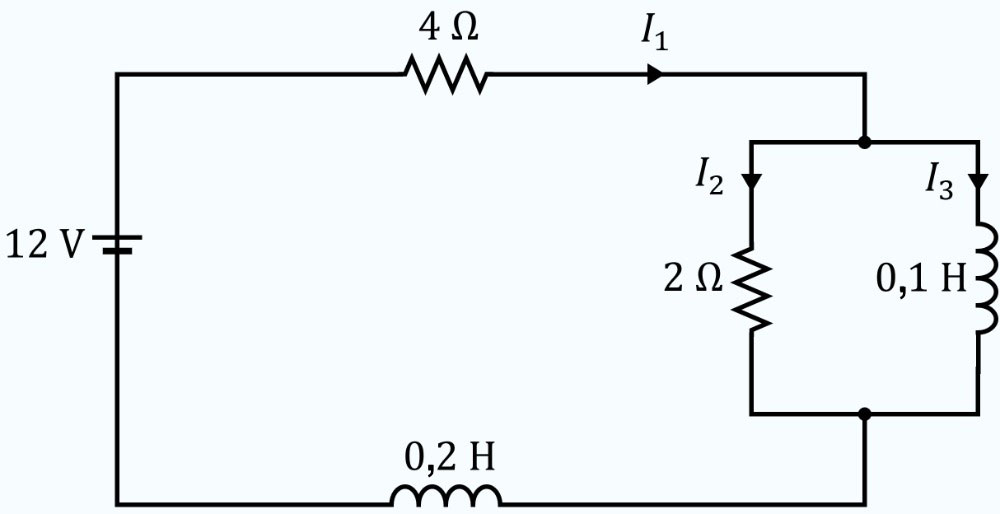
On représente le courant passant par la branche principale par  , le courant passant par la résistance de 2 Ω par
, le courant passant par la résistance de 2 Ω par  et le courant passant par l’inducteur de 0,1 H par
et le courant passant par l’inducteur de 0,1 H par  .
.
Étant donné que la baisse de tension aux bornes d’une résistance est  et, aux bornes d’un inducteur,
et, aux bornes d’un inducteur, /dt") , on applique la loi des mailles de Kirchhoff au réseau électrique.
, on applique la loi des mailles de Kirchhoff au réseau électrique.
Dans la boucle principale comprenant un inducteur de 0,1 H, on trouve
/dt+0,2(dI_1)/dt=12")
Dans la sous-branche comprenant la résistance de 2 Ω et l’inducteur de 0,1 H, on trouve
/dt-2I_2=0")
De même, comme le courant est divisé en et , on a

Le système d’équations décrivant les courants dans le circuit est donc
,(0,1I'_3-2I_2=0), (I_1-I_2-I_3=0) :}")

=I_2(0)=I_3(0)=0") (4.8.1)
(4.8.1)
b)
Pour résoudre le système, il faut appliquer la transformée de Laplace à chacune des équations du système :
,(0.1\mathcal{L}{I'_3}-2\mathcal{L}{I_2}=0), (\mathcal{L}{I_1}-\mathcal{L}{I_2}-\mathcal{L}{I_3}=0) :}") (4.8.2)
(4.8.2)
Si ") ,
, ") et
et ") , on a
, on a
-I_1(0)")
")
-I_3(0)")
")
Comme les courants initiaux sont nuls, le système présenté à la section 4.8.2 peut être simplifié en
+0,1sJ_3(s)+0,2sJ_1(s)=12/s),(0.1sJ_3(s)-2J_2(s)=0), (J_1(s)-J_2(s)-J_3(s)=0) :}")
Dans la troisième équation, on exprime ") en fonction des deux autres variables.
en fonction des deux autres variables.
Ensuite, on remplace cette expression par dans la deuxième équation, ce qui réduit le système à deux équations à deux inconnues.
+0,1sJ_3(s)+0,2sJ_1(s)=12/s),(0,1sJ_3(s)-2(J_1(s)-J_3(s))=0) :}")
Pour éliminer ") , on multiplie la première équation par
, on multiplie la première équation par ") et la deuxième équation par
et la deuxième équation par  , à la suite de quoi on additionne les deux équations. Cela donne
, à la suite de quoi on additionne les deux équations. Cela donne
(4+0,2s)J_1(s)+0,2sJ_1(s)")
12/s")
En réarrangeant ") , on obtient
, on obtient
=(1,2+24/s)/(0,02s^2+s+8)")
Pour éliminer les termes décimaux et rationnels, on multiplie le numérateur et le dénominateur par  .
.
=(60s+1200)/(s^3+50s^2+400s)")
/(s(s^2+50s+400))")
/(s(s+10)(s+40))")
En décomposant en fractions partielles, on obtient
=3/s-2/(s+10)-1/(s+40)")
En remplaçant dans la deuxième équation du système 4.8.4, on trouve .
=(2J_1(s))/(0,1s+2)")
/(s(s+10)(s+40)(0,1s+2))")
)/(s(s+10)(s+40)(0,1s+2))")
Ce qui peut être simplifié en
=1200/(s(s+10)(s+40))")
En décomposant en fractions partielles, on obtient
=3/s-4/(s+10)+1/(s+40)")
En remplaçant les expressions pour et dans l’équation 4.8.3, on trouve .
=J_1(s)-J_3(s)=2/(s+10)-2/(s+40)")
Enfin, en appliquant la transformée inverse de Laplace à  ,
,  , et
, et  , on détermine le courant dans les branches du circuit.
, on détermine le courant dans les branches du circuit.
} =I_1(t)")
-e^(-40t)")
} =I_2(t)")
-2e^(-40t)")
} =I_3(t)")
+e^(-40t)")
25
Table 4.1 : Table des transformées de Laplace
| | | Domaine de |
| | |
| | | |
| | | |
") | /(2s^(3//2))") | |
| | | |
| | | |
| | | |
| | | |
| | | |
| | | |
") | /(s^2+b^2)^2") | |
") | /(s^2+b^2)^2") | |
| | |  |
| | | |
Fonction en escalier : =u(t-a)") | /s") | |
f(t-a)") |  F(s)") |  |
| Fonction delta de Dirac : | | |
f(t)") | ") | |
") | ^kF^((k))(s)") | |
dx") | )/s") | |
g(x)dx") | .G(s)") |
Table 4.2 : Propriétés de la transformée de Laplace
| Propriété | Exemple |
| | |
| pour n’importe quelle constante | |
| | |
| | |
| | |
| | |
V
Ce chapitre aborde la délicate question de la résolution d’équations différentielles complexes, souvent rencontrées dans des applications physiques, qui ne donnent pas de solutions exprimables par des fonctions standard. Il se concentre sur les solutions en séries de puissances, qui constituent une méthode alternative.
5.1 Étude des séries de puissances : cette section revisite le concept des séries de puissances, en examinant leurs principales propriétés et leur utilisation pour résoudre des équations différentielles.
5.2 Solutions en séries de puissances d’équations différentielles linéaires : cette section traite du processus de recherche des séries de puissance représentant les solutions d’équations différentielles linéaires.

Emmy Noether, née en 1882 à Erlangen, en Allemagne, est une figure emblématique des mathématiques et de la physique théorique, qui a surmonté les formidables barrières de genre de son époque pour révolutionner ces domaines. Bien que le sexe d’Emmy Noether lui ait initialement interdit d’occuper un poste universitaire, ses profondes contributions, en particulier dans les domaines de l’algèbre abstraite et de la physique théorique, lui ont valu une reconnaissance mondiale. Sa découverte la plus importante, le théorème de Noether, a dévoilé un lien fondamental entre les symétries et les lois de conservation en physique, un principe crucial dans de nombreux domaines régis par des équations différentielles. Ses travaux sur le calcul des variations, un domaine étroitement lié aux équations différentielles, ont fourni des outils essentiels aux physiciens et aux mathématiciens. Les idées de Noether sur la théorie des anneaux et les invariants algébriques ont également jeté les bases de l’algèbre moderne, en influençant les méthodes employées pour résoudre des équations différentielles. L’histoire d’Emmy Noether n’est pas seulement celle d’un exploit intellectuel remarquable, c’est aussi un récit de résilience et de persévérance contre les normes sociétales de son époque. Son héritage continue d’inspirer et de crédibiliser des générations de mathématiciens et mathématiciennes et de scientifiques, symbolisant l’inlassable poursuite de la connaissance contre vents et marées.
26
Les équations différentielles n’ont pas toutes des solutions qui peuvent être exprimées en termes de fonctions élémentaires telles que des polynômes, des exponentielles, des fonctions trigonométriques, etc. Même lorsque c’est le cas, la recherche explicite de ces solutions peut se révéler complexe, voire impossible. Les solutions de séries permettent de représenter la solution sous la forme d’une somme infinie de termes. Elles peuvent fournir des indications sur le comportement des solutions, notamment leur convergence, leur oscillation ou leurs propriétés de croissance lorsqu’aucune solution explicite n’est connue. Dans les applications pratiques, une solution exacte peut ne pas être nécessaire, et une série finie (une troncature de la série infinie) peut servir de solution approximative. Cette méthode est particulièrement utile dans les méthodes de calcul et les simulations.
Avant d’aborder les solutions d’équations différentielles en séries de puissances, examinons de plus près le concept de série de puissances et ses propriétés pertinentes.
Une série de puissances est une série infinie de la forme
^oo\ a_n(x-x_0)^n")
où  est l’indice de sommation,
est l’indice de sommation,  représente le coefficient du terme d’ordre n,
représente le coefficient du terme d’ordre n,  est le centre de la série et
est le centre de la série et  est la variable. La série peut être exprimée comme suit :
est la variable. La série peut être exprimée comme suit :
+")
^2+ a_3(x-x_0)^3+ ...")
Cela nous permet d’approximer des fonctions dans les régions où la série converge, ce qui est essentiel pour comprendre et résoudre les équations différentielles. Nous pouvons parfois nous intéresser au modèle ou à la forme des termes initiaux de la série ou par la manipulation de termes tels que la réindexation ou la combinaison de termes. Nous pouvons donc « retirer » ces termes de la notation générale de la série.
 +somme_(n=2)^oo\ a_n(x-x_0)^n")
Ici, les deux premiers termes sont retirés de la notation générale de la série et l’indice de sommation commence désormais à  .
.
Le déplacement de l’indice d’une série de puissances modifie le point de départ de la sommation et réindexe les termes de la série. C’est particulièrement utile pour aligner les termes lors de l’addition ou de la soustraction de séries. Considérons une série de puissances
^oo\ a_nx^n")
Pour déplacer la série à droite de  unité, il faut remplacer par
unité, il faut remplacer par  dans le terme général et ajouter à la limite inférieure d’origine de la sommation.
dans le terme général et ajouter à la limite inférieure d’origine de la sommation.
^oo\ a_(n-k)x^(n-k)")
Pour déplacer la série de unité, il faut remplacer par  dans le terme général et soustraire de la limite inférieure d’origine de la sommation.
dans le terme général et soustraire de la limite inférieure d’origine de la sommation.
^oo\ a_(n+k)x^(n+k)")
Lorsque l’on résout des équations différentielles à l’aide de séries, il est souvent nécessaire d’ajouter ou de soustraire des séries. Lors de l’addition ou de la soustraction de séries, il faut s’assurer que les termes ajoutés ou soustraits correspondent à la même puissance de la variable. Autrement dit, il faut s’assurer que les deux séries ont la même puissance de  et que leurs indices de sommation sont correctement alignés à partir de la même limite inférieure. Considérons deux séries de puissances
et que leurs indices de sommation sont correctement alignés à partir de la même limite inférieure. Considérons deux séries de puissances
=somme_(n=0)^oo\ a_n(x-x_0)^n") et
et =somme_(n=0)^oo\ b_n(x-x_0)^n")
Comme la puissance du terme est la même dans les deux séries et que, dans les deux, l’indice commence à la même valeur, elles peuvent être linéairement combinées en
+c_2g(x)=somme_(n=0)^oo\ (c_1a_n+c_2b_n)(x-x_0)^n")
où  et
et  sont des constantes.
sont des constantes.
S’il y a un terme devant la sommation d’une série, on le déplace à l’intérieur de la sommation et on le combine avec le terme ^n") . Par exemple,
. Par exemple,
^c somme_(n=0)^oo\ a_n(x-x_0)^n")
^oo\ a_n(x-x_0)^(n+c)")
Cela simplifie la gestion et la manipulation des séries dans les solutions d’équations différentielles.
Écrire ce qui suit sous la forme d’une série unique en termes de ^n") .
.
^2 somme_(n=3)^oo na_n (x+2)^(n-4)-somme_(n=1)^oo na_n (x+2)^(n+1)")
1. D’abord, on multiplie le terme ^2") dans la première sommation.
dans la première sommation.
^oo na_n (x+2)^(n-4+2)-somme_(n=1)^oo na_n (x+2)^(n+1)")
^oo na_n (x+2)^(n-2)-somme_(n=1)^oo na_n (x+2)^(n+1)")
2. Ensuite, on déplace les indices dans les deux séries de façon à ce que l’exposant de ") soit . On peut ainsi déplacer la première série de deux unités sur la gauche et la seconde série d’une unité sur la droite.
soit . On peut ainsi déplacer la première série de deux unités sur la gauche et la seconde série d’une unité sur la droite.
^oo (n+2)a_(n+2) (x+2)^(n+2-2)-somme_(n=1+1)^oo (n-1)a_(n-1) (x+2)^(n-1+1)")
^oo (n+2)a_(n+2) (x+2)^(n)-somme_(n=2)^oo (n-1)a_(n-1) (x+2)^(n)")
3. Enfin, on s’assure que les deux séries commencent à la même limite inférieure. Selon la série, on peut parfois retirer des termes ou ajuster l’indice si les termes précédents sont déjà nuls. Il convient de noter que, si la seconde série commence à  , le terme initial sera nul en raison du facteur
, le terme initial sera nul en raison du facteur ") . Par conséquent, le fait de faire commencer l’indice à ne modifie en rien sa valeur globale.
. Par conséquent, le fait de faire commencer l’indice à ne modifie en rien sa valeur globale.
^oo (n+2)a_(n+2) (x+2)^(n)-somme_(n=1)^oo (n-1)a_(n-1) (x+2)^(n)")
On combine maintenant les séries afin d’obtenir une seule et unique réponse finale.
![=somme_(n=1)^oo [(n+2)a_(n+2)-(n-1)a_(n-1)] (x+2)^(n)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/73afff9b9536860c6906d1b4b066784c-1.png "=somme_(n=1)^oo [(n+2)a_(n+2)-(n-1)a_(n-1)] (x+2)^(n)")
Remarque : en général, quand une série contient un facteur de ") , le terme à
, le terme à  (où a est l’indice de départ) sera nul.
(où a est l’indice de départ) sera nul.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=234
La convergence des séries de puissances est essentielle pour garantir que la série représente la fonction avec précision sur un certain intervalle. Une série converge en un point particulier si la somme s’approche d’une limite finie lorsque s’approche de l’infini. Autrement dit, une série de puissances converge pour un donné si la limite suivante existe.
 oo)somme_(n=0)^Na_n (x-x_0 )^n » title= »lim_(N->oo)somme_(n=0)^Na_n (x-x_0 )^n » class= »asciimath mathjax »>
oo)somme_(n=0)^Na_n (x-x_0 )^n » title= »lim_(N->oo)somme_(n=0)^Na_n (x-x_0 )^n » class= »asciimath mathjax »>
Pour toute série de puissances, l’un ou l’autre des trois cas suivants peut être vrai :
 : ici, la somme des séries est égale à
: ici, la somme des séries est égale à  ..
.. : la série converge si
: la série converge si  et diverge si
et diverge si  . est appelé rayon de convergence et l’intervalle
. est appelé rayon de convergence et l’intervalle ") est l’intervalle de convergence.
est l’intervalle de convergence.Pour déterminer le rayon et l’intervalle de convergence d’une série de puissances donnée, on utilise souvent le test de ratio. Le test de ratio consiste à prendre la limite
 oo)|(a_n+1)/(a_n)|=L » title= »lim_(n->oo)|(a_n+1)/(a_n)|=L » class= »asciimath mathjax »>
oo)|(a_n+1)/(a_n)|=L » title= »lim_(n->oo)|(a_n+1)/(a_n)|=L » class= »asciimath mathjax »>
Si  , la série converge et le rayon de convergence est
, la série converge et le rayon de convergence est  .
.
La différenciation et l’intégration des séries de puissances dans leur intervalle de convergence peuvent être effectuées terme par terme. Pour une série de puissances donnée centrée en
La dérivée première de ") est
est
=somme_(n=1)^oo\ a_nd/(dx) (x-x_0)^n")
^oo\ na_n(x-x_0)^(n-1)")
Notez que l’indice de la dérivée première commence à , car le premier terme de la série originale est constant () et disparaît lors de la différenciation. L’intervalle de convergence de la série dérivée est au moins aussi grand que celui de la série originale, mais une attention particulière doit être portée aux extrémités.
De même, la dérivée seconde de est
=somme_(n=1)^oo\ na_nd/dx(x-x_0)^(n-1)")
^oo\ n(n-1)a_n(x-x_0)^(n-2)")
Notez que l’indice de la dérivée seconde commence à , car le premier terme de la dérivée première est constant ( ) et disparaît lors de la différenciation.
) et disparaît lors de la différenciation.
Supposons que  peut être exprimé sous la forme d’une série de puissances
peut être exprimé sous la forme d’une série de puissances ^oo\ a_nx^n") . Écrire ce qui suit sous la forme d’une seule série en termes de
. Écrire ce qui suit sous la forme d’une seule série en termes de  .
.
y''+2xy'-2y")
1. Il faut d’abord trouver  et
et  :
:
^oo\ a_nx^n")
^oo\ n a_n x^(n-1)")
^oo\ n a_nx^(n-1)")
^oo\ n(n-1) a_n x^(n-2)")
2. Ensuite, on remplace  et dans l’expression :
et dans l’expression :
somme_(n=2)^oo\ n(n-1) a_n x^(n-2)")
^oo\ n a_n x^(n-1)")
^oo\ a_nx^n")
3. En multipliant le terme devant la sommation par le terme dans le terme général de chaque série, on obtient
^oo\ n(n-1) a_n x^(n-2)")
^oo\ n(n-1) a_n x^n")
^oo\ n a_n x^n")
4. On observe que l’exposant de est le même dans toutes les séries sauf dans la première. Il suffit donc de décaler l’indice des premières sommations de 2 vers la gauche :
^oo\ (n+2)(n+1) a_(n+2) x^n")
5. Enfin, on s’assure que toutes les séries partent de la même limite inférieure Remarquez que la deuxième série est nulle à  parce qu’il y a des facteurs et
parce qu’il y a des facteurs et  dans le terme général de la série. Ainsi, son indice peut commencer à
dans le terme général de la série. Ainsi, son indice peut commencer à  sans changer de valeur. Pareillement, la troisième série est nulle à , de sorte qu’elle peut aussi commencer à . On réécrit donc les indices pour obtenir
sans changer de valeur. Pareillement, la troisième série est nulle à , de sorte qu’elle peut aussi commencer à . On réécrit donc les indices pour obtenir
^oo\ n(n-1) a_n x^n")
^oo\ n a_n x^n")
En combinant les séries, on obtient
![somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fa7cf6625d240b2ee223644bdddd5e5e.png "somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=234
Si deux séries de puissances sont égales pour tous les dans un intervalle ouvert contenant x_0, alors leurs coefficients doivent être égaux. Ainsi,
^oo\ a_n(x-x_0)^n=somme_(n=0)^oo\ b_n(x-x_0)^n")
implique que  pour tous les .
pour tous les .
Si une série de puissances est égale à zéro pour tous les dans un intervalle ouvert, alors tous ses coefficients doivent être nuls. Ainsi,
^oo\ a_n(x-x_0)^n=0")
implique que  pour tous les .
pour tous les .
Une série de Taylor est un type spécifique de représentation en série de puissances d’une fonction basée sur ses dérivées en un point spécifique, généralement en . Elle est donnée par
=somme_(n=0)^oo\ f^(n)(x_0)/(n!)(x-x_0)^n")
Ici, (x_0)") est la n-ième dérivée de évaluée à et
est la n-ième dérivée de évaluée à et  est le factoriel de .
est le factoriel de .
Lorsque  , la série est souvent appelée série de Maclaurin. Les développements de Taylor d’une nouvelle fonction en
, la série est souvent appelée série de Maclaurin. Les développements de Taylor d’une nouvelle fonction en  (série de Maclaurin) sont les suivants :
(série de Maclaurin) sont les suivants :
^oo\ x^n/(n!)=")
+x^3/(3!)+...")
=somme_(n=n_0)^oo\(-1)^n x^(2n+1)/((2n+1)!)=")
+x^5/(5!)- ...")
=somme_(n=n_0)^oo\(-1)^n x^(2n)/((2n)!)=")
+x^4/(4!)- ...")
Une relation récursive pour une série permet de calculer chaque terme de la série en utilisant un ou plusieurs des termes précédents. Au lieu de définir chaque terme indépendamment, la relation récursive relie chaque terme à ses prédécesseurs, construisant ainsi la série progressivement. Cette méthode est particulièrement utile lorsque le calcul direct des termes est complexe ou lorsque la relation entre des termes consécutifs est plus simple à exprimer.
En général, une relation récursive présente la structure suivante :
,a_(n-2),...a_(n-k))") pour
pour  k » title= »n>k » class= »asciimath mathjax »>
k » title= »n>k » class= »asciimath mathjax »>
Ici, est le terme d’ordre n de la série et  est une fonction qui définit le mode de calcul du terme d’ordre n en utilisant les termes précédents.
est une fonction qui définit le mode de calcul du terme d’ordre n en utilisant les termes précédents.
La relation récursive permet de calculer tous les coefficients de la série à partir d’un ensemble de conditions initiales ou de coefficients connus. Ceux-ci sont généralement dérivés des conditions initiales ou limites de l’équation différentielle.
Supposons que la formule récursive pour la solution d’une série de puissance soit
 = -a_n/((n+1)(n+4))")
Trouver les deuxième, troisième et quatrième termes de la série en termes de et .
Pour trouver les termes, il faut introduire  dans la relation récursive.
dans la relation récursive.
 \ a_(0+2)=-a_0/((0+1)(0+4))\ ->\ a_2=-a_0/4″ title= »n=0\ ->\ a_(0+2)=-a_0/((0+1)(0+4))\ ->\ a_2=-a_0/4″ class= »asciimath mathjax »>
\ a_(0+2)=-a_0/((0+1)(0+4))\ ->\ a_2=-a_0/4″ title= »n=0\ ->\ a_(0+2)=-a_0/((0+1)(0+4))\ ->\ a_2=-a_0/4″ class= »asciimath mathjax »>
 \ a_(1+2)=-a_1/((1+1)(1+4))\ ->\ a_3=-a_1/10″ title= »n=1\ ->\ a_(1+2)=-a_1/((1+1)(1+4))\ ->\ a_3=-a_1/10″ class= »asciimath mathjax »>
\ a_(1+2)=-a_1/((1+1)(1+4))\ ->\ a_3=-a_1/10″ title= »n=1\ ->\ a_(1+2)=-a_1/((1+1)(1+4))\ ->\ a_3=-a_1/10″ class= »asciimath mathjax »>
 \ a_(2+2)=-a_2/((2+1)(2+4))\ ->\ a_4=-a_2/18″ title= »n=2\ ->\ a_(2+2)=-a_2/((2+1)(2+4))\ ->\ a_4=-a_2/18″ class= »asciimath mathjax »>
\ a_(2+2)=-a_2/((2+1)(2+4))\ ->\ a_4=-a_2/18″ title= »n=2\ ->\ a_(2+2)=-a_2/((2+1)(2+4))\ ->\ a_4=-a_2/18″ class= »asciimath mathjax »>
Étant donné que  ,
,  peut être écrit en termes de :
peut être écrit en termes de :
=a_0/72")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=234
. ^oo \ n (n-1) a_n x^(n-2)")
^oo\ -2n a_n x^(n-1)")
^oo\ -3a_n x^n")
![somme_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-2n a_n-3a_n]x^n](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2af78124383a3768d20ba4c25718b5ae.png "somme_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-2n a_n-3a_n]x^n")
puisse être exprimé sous la forme d’une série de puissances . Écris ce qui suit sous la forme d’une série unique en termes de . 
![somme_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-5n a_n+2a_n]x^n](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/873f2c00e85f34e40f64b0e4b50274b2.png "somme_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-5n a_n+2a_n]x^n")
 = -a_n/((n+1)(n+2))")
Trouvez les quatrième et cinquième termes en termes de et .


27
Dans les sections précédentes, nous nous sommes principalement intéressés aux équations différentielles linéaires homogènes à coefficients constants. Cependant, de nombreuses applications physiques conduisent à des équations différentielles linéaires homogènes du second ordre plus complexes de la forme
où  et
et  sont des polynômes sans facteur commun. Souvent, les solutions à l’équation de la section 5.2.1 ne peuvent pas être exprimées sous la forme de fonctions familières, ce qui incite à utiliser des solutions en séries. On commence par normaliser l’équation en la divisant par
sont des polynômes sans facteur commun. Souvent, les solutions à l’équation de la section 5.2.1 ne peuvent pas être exprimées sous la forme de fonctions familières, ce qui incite à utiliser des solutions en séries. On commence par normaliser l’équation en la divisant par ") afin que le coefficient de soit égal à 1.
afin que le coefficient de soit égal à 1.
)/(P_0(x) )y'+(P_2(x))/(P_0(x) ) y=0")
Étant donné la continuité des polynômes,  et
et  sont continus, sauf éventuellement lorsque
sont continus, sauf éventuellement lorsque=0") . Un point où
. Un point où !=0") est appelé point ordinaire de l’équation de la section 5.2.1; sinon, c’est un point singulier. Il faut savoir que, aux points ordinaires,
est appelé point ordinaire de l’équation de la section 5.2.1; sinon, c’est un point singulier. Il faut savoir que, aux points ordinaires,  et sont analytiques, ce qui autorise la représentation en série de puissances.
et sont analytiques, ce qui autorise la représentation en série de puissances.
Théorème. Supposons que et sont des polynômes sans facteur commun et que !=0") . Si est un point ordinaire de l’équation de la section 5.2.1, de sorte que chaque solution de l’équation peut être représentée par une série de puissances.
. Si est un point ordinaire de l’équation de la section 5.2.1, de sorte que chaque solution de l’équation peut être représentée par une série de puissances.
En outre, le rayon de convergence d’une telle solution en série de puissances est au moins aussi grand que la distance entre et le point singulier (réel ou complexe) le plus proche de l’équation. Si  est constant, c’est-à-dire jamais nul, le rayon de convergence sera infini et l’intervalle de convergence sera
est constant, c’est-à-dire jamais nul, le rayon de convergence sera infini et l’intervalle de convergence sera ") .
.
Pour trouver la solution en série de l’équation de la section 5.2.1, on considère une série de puissances convergeant près d’un point ordinaire . En supposant que la solution peut être écrite sous forme de série de puissances (section 5.2.2), on remplace et ses dérivées dans l’équation différentielle donnée et on rassemble les puissances similaires de. En fixant le coefficient de chaque puissance à zéro, on peut systématiquement trouver la valeur des coefficients , ce qui donne souvent une relation récursive.
1. Déterminer l’équation différentielle et choisir le point autour duquel développer la série (généralement un point ordinaire).
2. Supposer une solution en série de puissances (équation de la section 5.2.2) pour et trouver ses dérivées , , etc., comme l’exige l’équation différentielle.
3. Remplacer la série et ses dérivées dans l’équation différentielle.
4. Organiser les puissances similaires en alignant les termes, de façon à ce que toutes les séries soient exprimées à partir de la même valeur de départ de .
5. Regrouper les coefficients des puissances similaires de .
6. Résoudre les équations en mettant en équation les coefficients de puissances similaires de pour trouver des relations entre les ‘s.
7. Utiliser les conditions initiales ou limites données pour trouver des spécifiques. Utiliser la relation récursive pour déterminer tous les coefficients.
8. Construire la solution avec les coefficients trouvés et examiner le rayon et l’intervalle de convergence.
Déterminer une solution en série à l’équation différentielle

1. Étant donné que =1") , les coefficients sont analytiques en tout point. On suppose que et que la solution peut être écrite sous forme de série de puissances.
, les coefficients sont analytiques en tout point. On suppose que et que la solution peut être écrite sous forme de série de puissances.
2. Il faut d’abord trouver :
3. Ensuite, on remplace et dans l’équation :
^oo\ a_nx^n=0")
4. L’étape suivante consiste à aligner les termes. Pour ce faire, il faut déplacer les indices de sommation de façon à ce qu’ils commencent à la même valeur. Si  ou
ou  dans la première sommation et
dans la première sommation et  dans la deuxième sommation, on a
dans la deuxième sommation, on a
^oo\ (k+2)(k+1) a_(k+2) x^(k)")
^oo\ a_kx^k=0")
5. En additionnant les séries, on obtient
![somme_(k=0)^oo\ [(k+2)(k+1) a_(k+2)+a_k] x^(k) =0](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1da7da7308d332963030da00af07ae55.png "somme_(k=0)^oo\ [(k+2)(k+1) a_(k+2)+a_k] x^(k) =0")
6. D’après la propriété des séries de puissances disparaissant sur un intervalle vue à la section 5.1, on sait que si une série de puissances est nulle , alors tous ses coefficients doivent être nuls. On en conclut donc que
(k+1) a_(k+2)+a_k=0")
ou
=(-a_k)/((k+2)(k+1) ),")

C’est ce que l’on appelle la relation de récurrence pour les valeurs de pour lesquelles la relation est vraie.
7. Ensuite, on écrit quelques termes de la série pour voir si l’on peut déterminer la tendance et, avec un peu de chance, la formule explicite de la série. Quand  , on a
, on a
 /((2)(1) )") |  /((3)(2) )") |
 /((4)(3) )") /((4)(3)(2)(1) )") |  /((5)(4) )") /((5)(4)(3)(2) )") |
 /((6)(5) )") /((6)(5)(4)(3)(2)(1) )") |  /((7)(6) )") /((7)(6)(5)(4)(3)(2) )") |
On remarque que le terme avec des indices pairs peut être écrit par rapport au terme précédent et même en termes de et qu’il en va de même avec les indices impairs en termes de . Par conséquent, en écrivant la relation de récurrence séparément pour les indices ( ) impairs et les indices (
) impairs et les indices ( ) pairs, on obtient
) pairs, on obtient
=((-1)^ma_0)/((2m)!")

=((-1)^ma_1)/((2m+1)!")
8. La solution générale de l’équation peut donc être écrite sous la forme
^oo\ a_(2m)x^(2m)")
^oo\ a_(2m+1)x^(2m+1)")
^oo\ (-1)^m x^(2m) /((2m)!")
^oo\ (-1)^mx^(2m+1) /((2m+1)!")
On constate que les séries dans la solution sont les séries de Maclaurin de ") et de
et de ") , respectivement.
, respectivement.
=somme_(m=0)^oo\ (-1)^m x^(2m) /((2m)!") et
et =somme_(m=0)^oo\ (-1)^mx^(2m+1) /((2m+1)!")
Par conséquent, la solution générale de l’équation peut être exprimée sous la forme
+a_1sin(x)")
pour des constantes arbitraires et . Cette solution est identique à celle que nous obtiendrions avec les méthodes abordées aux sections précédentes.
L’intervalle de convergence pour les séries de cosinus et de sinus est constitué de tous les nombres réels ") .
.
Pour les deux séries de la solution, le test de ratio indique que, à mesure que  oo » title= »m->oo » class= »asciimath mathjax »>, la limite
oo » title= »m->oo » class= »asciimath mathjax »>, la limite  approche de zéro, ce qui signifie que la série converge pour tous les nombres réels. Partant, sans connaissance préalable des séries représentant le sinus et le cosinus, on conclurait que l’intervalle de convergence pour chaque série et donc la solution de séries combinées est un nombre réel entier .
approche de zéro, ce qui signifie que la série converge pour tous les nombres réels. Partant, sans connaissance préalable des séries représentant le sinus et le cosinus, on conclurait que l’intervalle de convergence pour chaque série et donc la solution de séries combinées est un nombre réel entier .
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=236
Dans la pratique, nous essayons de trouver des solutions en série pour des équations à coefficients non constants. En effet, les équations à coefficients constants peuvent être facilement résolues à l’aide de la technique décrite au chapitre 3 pour les équations homogènes à coefficients constants. Prenons un autre exemple pour une équation à coefficients non constants.
Trouver une solution en série à l’équation différentielle
y''+2xy'-2y=0")
1. On note que =1+x^2") n’a pas de racine, de sorte que chaque point dans cette équation constitue un point ordinaire. On suppose que la solution peut être écrite sous forme de série de puissances.
n’a pas de racine, de sorte que chaque point dans cette équation constitue un point ordinaire. On suppose que la solution peut être écrite sous forme de série de puissances.
2. Ensuite, on trouve et :
3. On remplace maintenant et dans l’équation :
^oo\ a_nx^n=0")
En multipliant les coefficients par la série, on obtient
4. On observe que l’exposant de est le même dans toutes les séries sauf la première. Il suffit donc de décaler l’indice des premières sommations de 2 :
On remarque maintenant que la deuxième série est nulle à. L’indice peut donc commencer à . Pareillement, la troisième série est nulle à , de sorte qu’elle peut aussi commencer à . On réécrit donc les indices pour obtenir
5. En combinant les séries, on obtient
![somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n=0](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1e33a81a0ec721cff0c0719147f7d574.png "somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n=0")
![somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n^2+n-2)a_n] x^n=0](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f64159e969f5ec9cafcc8b2df42505d4.png "somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n^2+n-2)a_n] x^n=0")
6. En définissant un coefficient nul, on obtient
(n+1) a_(n+2)+(n^2+n-2) a_n=0")
=-(n^2+n-2) /((n+2)(n+1) )a_n")
(n-1)) /((n+2)(n+1) )a_n")
7. La relation récursive peut donc être simplifiée en
=-(n-1) /(n+1)a_n")
Avec  , on obtient
, on obtient
  |   |
   |    |
 > >   |   |
On remarque que tous les termes à indices impairs sont nuls sauf . Par conséquent, en écrivant la relation de récurrence séparément pour les indices ( ) impairs et les indices (
) impairs et les indices ( ) pairs, on obtient
) pairs, on obtient
=(-1)^(m+1)1/(2m-1)a_0")

=a_1")

8. La solution générale de l’équation peut donc être écrite sous la forme
+1) +somme_(m=1)^oo\ a_(2m)x^(2m)")
^oo\(-1)^(m+1)x^(2m)/(2m-1)")
Trouver les six premiers termes dans la solution en série du problème de valeur initiale
y''+2xy'-2y=0,")
=2,\ y'(0)=3")
L’exemple de la section 5.2.2 a donné la solution en série de puissances de cette équation différentielle.
Pour appliquer les conditions initiales, on reconnaît d’abord que =2") et
et =3") . Ensuite, on remplace et dans la solution générale afin de calculer les autres termes.
. Ensuite, on remplace et dans la solution générale afin de calculer les autres termes.




![a_0[(-1)^(1+1)x^(2(1))/(2(1)-1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c3f0acc4c7fb6134827403b64e5949de.png "a_0[(-1)^(1+1)x^(2(1))/(2(1)-1)]")



![a_4=a_0[(-1)^(2+1)x^(2(2))/(2(2)-1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bfc45a5d9c306b6cec9135c47d626d99.png "a_4=a_0[(-1)^(2+1)x^(2(2))/(2(2)-1)]")


![a_6=a_0[(-1)^(3+1)x^(2(3))/(2(3)-1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/086651c115e9cc96d60c02073f6cda13.png "a_6=a_0[(-1)^(3+1)x^(2(3))/(2(3)-1)]")



![a_8=a_0[(-1)^(4+1)x^(2(4))/(2(4)-1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7b31549a8d2fe7870cf6339200666995.png "a_8=a_0[(-1)^(4+1)x^(2(4))/(2(4)-1)]")
La solution du problème de valeur initiale est donc
=2+3x+2x^2-2/3x^4+2/5x^6-2/7x^8+...") .
.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=236
y''+(1-3x)y'-y=0,")
=3,\ y'(0)=2")


=4,\ y'(0)=3")

y''+(1-4x)y'+(2+5x)y=0,")
=1,\ y'(0)=2")

VI
Ce chapitre présente la méthode matricielle, permettant de résoudre des systèmes d’équations différentielles linéaires du premier ordre. Ces systèmes permettent de modéliser des scénarios comportant de multiples processus interdépendants, ce qui est courant dans les situations complexes du monde réel.
6.1 Étude des matrices : cette section donne un aperçu concis des grands concepts de la théorie des matrices en algèbre linéaire, fondamentaux pour aborder les systèmes d’équations différentielles.
6.2 Indépendance linéaire et systèmes d’équations : cette section passe en revue les systèmes d’équations linéaires et les méthodes permettant d’évaluer l’indépendance linéaire des ensembles de solutions.
6.3 Révision : valeurs propres et vecteurs propres : cette section revient sur les valeurs propres et les vecteurs propres, en expliquant leur calcul et leur importance dans la résolution des systèmes d’équations différentielles.
6.4 Systèmes linéaires d’équations différentielles : cette section présente les systèmes d’équations différentielles du premier ordre et leurs représentations matricielles, en traitant de l’existence de solutions. Il explore également la transformation d’équations différentielles de degré supérieur en formes de systèmes du premier ordre.
6.5 Solutions de systèmes homogènes : cette section détaille les méthodes de recherche de solutions pour les systèmes d’équations différentielles homogènes et se sert du wronskien pour vérifier l’indépendance des solutions.
6.6 Systèmes homogènes à coefficients constants : valeurs propres réelles : cette section poursuit l’exploration des systèmes homogènes d’équations différentielles à coefficients constants, en se concentrant sur les scénarios avec des valeurs propres en nombres réels.
6.7 Systèmes homogènes à coefficients constants : valeurs propres complexes : cette section traite de la résolution de systèmes homogènes à coefficients constants lorsque les valeurs propres sont des nombres complexes.
6.8 Systèmes homogènes à coefficients constants : valeurs propres répétées : cette section traite de la résolution de systèmes homogènes à coefficients constants lorsque les valeurs propres sont des nombres réels répétés.
6.9 Systèmes linéaires non homogènes : cette section étudie les systèmes linéaires non homogènes, en se concentrant sur la méthode de variation des paramètres.
Evelyn Boyd Granville, née en 1924 à Washington, D.C., est une mathématicienne pionnière dont le parcours témoigne de la résilience et du talent face aux barrières raciales et sexistes. Evelyn Granville, l’une des premières Afro-Américaines à obtenir un doctorat en mathématiques à l’université de Yale en 1949, a commencé par travailler sur l’analyse fonctionnelle, posant ainsi les fondations d’une carrière diversifiée et marquante. Elle a joué un rôle essentiel dans la course à l’espace des États-Unis, en travaillant avec IBM sur les programmes spatiaux Project Vanguard et Project Mercury, où elle a développé des algorithmes informatiques complexes pour l’analyse des trajectoires. Ces travaux s’appuyaient notamment sur les systèmes d’équations différentielles pour calculer les orbites et prédire les trajectoires des engins spatiaux – une composante stratégique de la réussite de ces premières missions spatiales.
Les contributions de Granville ont largement dépassé le cadre de l’exploration spatiale. Elle était également une pédagogue passionnée et une grande défenseure des femmes et des minorités dans les domaines des STIM. Tout au long de sa carrière, elle a enseigné les mathématiques dans diverses universités et a incité d’innombrables étudiantes à poursuivre des carrières scientifiques et technologiques.
28
L’algèbre linéaire, en particulier l’étude des matrices, est indispensable pour comprendre et résoudre des systèmes d’équations différentielles. Cette section donne un aperçu ciblé des concepts clés de la théorie des matrices.
Une matrice est un tableau rectangulaire de nombres, de symboles ou d’expressions, disposés en lignes et en colonnes. Les éléments individuels d’une matrice sont appelés éléments ou entrées. Une matrice est généralement désignée par une lettre majuscule (par exemple, A, B, C). L’élément figurant à la ligne  et la colonne
et la colonne  de la matrice A est noté
de la matrice A est noté ") . Les dimensions d’une matrice sont données en
. Les dimensions d’une matrice sont données en  . Par exemple, une matrice A avec
. Par exemple, une matrice A avec  lignes et colonnes est une matrice
lignes et colonnes est une matrice  .
.
![A = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]_(mxxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3822e77582622e2a9cc1b0410f5e36f0.png "A = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]_(mxxn)")
Une matrice ligne a une seule ligne et plusieurs colonnes, tandis qu’une matrice colonne a une seule colonne et plusieurs lignes Elles sont également dénommées vecteurs ligne et vecteurs colonne, respectivement.
![x = [[a_11, a_12,...,a_(1n)]]_(1xxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4480d0fc4b53f65d7de498d2142ed5bc.png "x = [[a_11, a_12,...,a_(1n)]]_(1xxn)")
![y = [[a_11],[a_(21)], [vdots] ,[a_(m1)] ]_(mxx1)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c1001cc07bc48628ec706ab468252ace.png "y = [[a_11],[a_(21)], [vdots] ,[a_(m1)] ]_(mxx1)")
Une matrice comportant le même nombre de lignes et de colonnes est une matrice carrée. Par exemple, la matrice B est une matrice carrée  .
.
![B = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]_(nxxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1d85735e5cdddfab5b5cb2943c199c3c.png "B = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]_(nxxn)")
Dans une matrice diagonale, les éléments en dehors de la diagonale principale sont tous nuls. La diagonale principale est l’ensemble d’éléments où  . Par exemple, la matrice C est une matrice diagonale .
. Par exemple, la matrice C est une matrice diagonale .
![C = [[a_11, 0 ,..., 0],[0,a_22, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., a_(n\n)] ]_(nxxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b36d57e1a007fe4a5ffa0effc526c9fa.png "C = [[a_11, 0 ,..., 0],[0,a_22, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., a_(n\n)] ]_(nxxn)")
La matrice identité est un type particulier de matrice diagonale, où tous les éléments de la diagonale principale sont des 1. Elle est notée  ou
ou  pour indiquer sa taille ().
pour indiquer sa taille ().
![I_n = [[1, 0 ,..., 0],[0,1, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 1] ]_(nxxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/15d61a62fbbd3f4322ec761967d6e172.png "I_n = [[1, 0 ,..., 0],[0,1, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 1] ]_(nxxn)")
La matrice nulle est une matrice dont tous les éléments sont nuls. Elle est notée ") pour indiquer ses dimensions.
pour indiquer ses dimensions.
![0_(mxxn) = [[0, 0 ,..., 0],[0,0, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 0] ]_(mxxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/288678af2fe03c972feeae61b6de0482.png "0_(mxxn) = [[0, 0 ,..., 0],[0,0, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 0] ]_(mxxn)")
L’addition et la soustraction de matrices sont des opérations élémentaires qui consistent à additionner ou soustraire des matrices de mêmes dimensions, élément par élément. Si ![A=[a_(ij)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b8cb22330fb905bae2aedbf4683f0257.png "A=[a_(ij)]") et
et ![B=[b_(ij)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/03f09e9a20341c9c81fc89ffa3850a2d.png "B=[b_(ij)]") sont des matrices de même taille, leur somme
sont des matrices de même taille, leur somme  est une matrice dont chaque élément
est une matrice dont chaque élément =a_(ij)+b_(ij)") .
.
Ces opérations sont commutatives (c’est-à-dire  ) et associatives (c’est-à-dire
) et associatives (c’est-à-dire +C=A+(B+C)") ).
).
La multiplication par un scalaire consiste à multiplier chaque élément d’une matrice par un scalaire (un nombre constant). Si est un scalaire et si , alors  est une matrice dont chaque élément est
est une matrice dont chaque élément est ") .
.
La multiplication par un scalaire est distributive sur l’addition ou la soustraction de matrices (c’est-à-dire =kA+kB") ) et associative par rapport à la multiplication de scalaires (c’est-à-dire
) et associative par rapport à la multiplication de scalaires (c’est-à-dire =(kl)A") ).
).
Trouver la matrice  où
où  avec les matrices
avec les matrices  et
et  .
.
![A=[[-1,3],[0,7]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6ad7c9fc8cd8eabfd44ec2f209c32d00.png "A=[[-1,3],[0,7]]") et
et ![B=[[2,-4],[-2,5]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c4d2306d307472b645c49dea09d3af59.png "B=[[2,-4],[-2,5]]")
Les matrices et sont de la même taille et peuvent donc être soustraites.
![C=3[[-1,3],[0,7]] -[[2,-4],[-2,5]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0d6525bcc19b4e212d1dc5fbe34bcec9.png "C=3[[-1,3],[0,7]] -[[2,-4],[-2,5]]")
Il faut d’abord multiplier tous les éléments de la matrice A par 3.
![=[[-3,9],[0,21]] -[[2,-4],[-2,5]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d84924f8b0a514e3aa946ebebf3c2125.png "=[[-3,9],[0,21]] -[[2,-4],[-2,5]]")
On soustrait ensuite les éléments correspondants.
![=[[-3-2,9-(-4)],[0-(-2),21-5]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c8ece06490ea59f699b040b5313fb524.png "=[[-3-2,9-(-4)],[0-(-2),21-5]]")
![C=[[-5,13],[2,16]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/df4ec4e38d075d0184517ea24d641215.png "C=[[-5,13],[2,16]]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=240
La multiplication par un scalaire n’est possible que lorsque le nombre de colonnes dans la première matrice est égal au nombre de lignes dans la deuxième matrice. Prenons deux matrices ") et
et ") . Le produit de ces matrices donne une nouvelle matrice
. Le produit de ces matrices donne une nouvelle matrice ") , où la dimension de C est
, où la dimension de C est  . Chaque élément de C est calculé en prenant le produit scalaire d’une ligne correspondante dans A et d’une colonne correspondante dans B. Le calcul de chaque élément à la ligne et la colonne de C est donné par la formule
. Chaque élément de C est calculé en prenant le produit scalaire d’une ligne correspondante dans A et d’une colonne correspondante dans B. Le calcul de chaque élément à la ligne et la colonne de C est donné par la formule
La multiplication des matrices est associative, ce qui signifie que C = A(BC)") . Elle est aussi distributive sur l’addition, ce qui implique que
. Elle est aussi distributive sur l’addition, ce qui implique que  = AB + AC") . Cependant, elle n’est pas commutative, de sorte que
. Cependant, elle n’est pas commutative, de sorte que  n’est pas nécessairement égal à
n’est pas nécessairement égal à  .
.
Les cas particuliers de la multiplication de matrices comprennent les interactions avec les matrices identité et les matrices nulles. La multiplication de n’importe quelle matrice par une matrice identité de taille appropriée laisse la matrice inchangée (c’est-à-dire  ). N’importe quelle matrice multipliée par une matrice nulle donne une matrice nulle de dimensions appropriées.
). N’importe quelle matrice multipliée par une matrice nulle donne une matrice nulle de dimensions appropriées.
Calculer la matrice  sachant que
sachant que
![A=[[1,4,-1],[2,0,-5]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/55cd6152712bd70d58b73411a0f470e6.png "A=[[1,4,-1],[2,0,-5]]") et
et ![B=[[-7,3,-1,0],[-5,1,4,3],[0,-2,1,2]].](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1379ee328e4b92fdb9e21e1922295c17.png "B=[[-7,3,-1,0],[-5,1,4,3],[0,-2,1,2]].")
Pour calculer le produit des matrices A et BT, , il faut d’abord s’assurer que la multiplication est possible. La matrice A a les dimensions  , et la matrice B les dimensions
, et la matrice B les dimensions  . Comme le nombre de colonnes dans A (3) est égal au nombre de lignes dans B (3), la multiplication peut être effectuée. La matrice C ainsi obtenue aura les dimensions
. Comme le nombre de colonnes dans A (3) est égal au nombre de lignes dans B (3), la multiplication peut être effectuée. La matrice C ainsi obtenue aura les dimensions  .
.
On calcule chaque élément de la matrice C au moyen de l’équation 6.1.1 :
(-7)+(4)(-5)+(-1)(0)=-27")
(3)+(4)(1)+(-1)(-2)=9")
(-1)+(4)(4)+(-1)(1)=14")
(0)+(4)(3)+(-1)(2)=10")
(-7)+(0)(-5)+(-5)(0)=-14")
(3)+(0)(1)+(-5)(-2)=16")
(-1)+(0)(4)+(-5)(1)=-7")
(0)+(0)(3)+(-5)(2)=-10")
La matrice C obtenue est donc
![C=[[-27,9,14,10],[-14,16,-7,-10]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dd7e421ae0a982124c0588891df0ecd1.png "C=[[-27,9,14,10],[-14,16,-7,-10]]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=240
Le déterminant est une valeur scalaire associée à chaque matrice carrée. Il fournit des informations essentielles sur la matrice, telles que son inversibilité. Le déterminant d’une matrice A est noté comme suit
=|A|")
Pour une matrice  , le déterminant est calculé comme suit :
, le déterminant est calculé comme suit :
Pour les matrices carrées plus grandes, le déterminant est généralement calculé à l’aide de la méthode d’expansion en cofacteurs. Par exemple, le déterminant d’une matrice  peut être calculé en pratiquant une expansion selon n’importe quelle ligne ou colonne. Pour l’expansion selon la première ligne, la formule est
peut être calculé en pratiquant une expansion selon n’importe quelle ligne ou colonne. Pour l’expansion selon la première ligne, la formule est
Une autre approche du calcul des déterminants, notamment pour les grandes matrices, consiste à utiliser la réduction des lignes pour transformer la matrice en une forme triangulaire supérieure. Le déterminant est alors le produit des éléments diagonaux.
Trouver le déterminant des matrices données.
![A=[[-5,-1],[3,2]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5790881d5a00dcbef515818dc5174f7a.png "A=[[-5,-1],[3,2]]") et
et ![B= [[2,4,7],[5,-3,8],[0,-1,3] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/86ba0dfd1c8ed0cf775c07c07b11a00a.png "B= [[2,4,7],[5,-3,8],[0,-1,3] ]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=240
L’inverse d’une matrice carrée , noté ") , est une matrice qui, lorsqu’elle est multipliée par donne la matrice identité.
, est une matrice qui, lorsqu’elle est multipliée par donne la matrice identité.

Une méthode courante pour trouver un inverse de matrice consiste à utiliser l’adjointe et le déterminant. La formule est
} \text{adj}(A)")
où ") est l’adjointe de , calculée à partir des cofacteurs de . Cette méthode consiste à calculer le déterminant puis la matrice cofacteur, qui est ensuite transposée pour obtenir la matrice adjointe. Pour une matrice ,
est l’adjointe de , calculée à partir des cofacteurs de . Cette méthode consiste à calculer le déterminant puis la matrice cofacteur, qui est ensuite transposée pour obtenir la matrice adjointe. Pour une matrice , ![A=[[a_11,a_12],[a_21,a_22]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4274fe78ca6d9f4f0b322cb4aa087d8c.png "A=[[a_11,a_12],[a_21,a_22]]") , l’inverse est donné par
, l’inverse est donné par
Une autre méthode pour trouver l’inverse est la réduction de ligne, qui suppose d’augmenter la matrice avec la matrice identité
![[A|I]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d26ef42e744ddaa445ef88eb14213f01.png "[A|I]")
puis à effectuer des opérations sur les lignes pour transformer en matrice identité. Les opérations permettant de transformer A en transforment la matrice identité augmentée en  .
.
![[I|A^-1]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9dbdc823b69c59a2bac71a8f5989ac82.png "[I|A^-1]")
Cette méthode est particulièrement utile pour les calculs numériques et les matrices plus grandes.
Si une matrice est inversible, son inverse est unique. Une matrice carrée est inversible si et seulement si elle est non singulière, c’est-à-dire que son déterminant n’est pas nul. Si le déterminant d’une matrice est nul, la matrice n’a pas d’inverse et est alors dite singulière.
Trouver l’inverse de la matrice A, si tant est qu’il existe.
![A=[[4,6],[2,6]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d07df574ab2124b662937e948d40407c.png "A=[[4,6],[2,6]]")
Il faut d’abord trouver le déterminant de A pour déterminer si elle a un inverse.
(6)-(2)(6)=12")
Le déterminant n’étant pas nul, il existe un inverse. Pour une matrice , l’approche des cofacteurs, la formule de la section 6.1.4, est plutôt simple.
![A^-1=1/12[[6,-6],[-2,4]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dae4f24454ec630f863c76f36956acd6.png "A^-1=1/12[[6,-6],[-2,4]]")
![=[[1/2,-1/2],[-1/6,1/3]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/23eeda67ce4b2c52a979adaa70133307.png "=[[1/2,-1/2],[-1/6,1/3]]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=240
Trouver l’inverse de la matrice A, si tant est qu’il existe.
![A=[[1,0,3],[-3,1,-9],[0,2,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a709ecf8b6a83a38d2af880b64c7545d.png "A=[[1,0,3],[-3,1,-9],[0,2,1]]")
Pour trouver l’inverse d’une matrice , la méthode de la réduction de ligne est la plus directe. Pour trouver l’inverse de la matrice par la méthode de réduction de ligne, on commence par former une matrice augmentée avec la matrice et la matrice identité  . Le but est d’effectuer des opérations sur les lignes pour transformer le côté gauche de la matrice augmentée (les trois premières colonnes) en matrice identité.
. Le but est d’effectuer des opérations sur les lignes pour transformer le côté gauche de la matrice augmentée (les trois premières colonnes) en matrice identité.
![[A|I]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5325401372ea5b72aaeada54f6f3af71.png "[A|I]=")
![[[1,0,3,|,1,0,0],[-3,1,-9,|,0,1,0],[0,2,1,|,0,0,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/121cf3902cd2a141cd37069f9b42c53a.png "[[1,0,3,|,1,0,0],[-3,1,-9,|,0,1,0],[0,2,1,|,0,0,1]]")
Effectuer l’opération de ligne :
 (Ajouter 3 fois la première ligne à la deuxième ligne) :
(Ajouter 3 fois la première ligne à la deuxième ligne) :
![[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,2,1,|,0,0,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d9d337066d566087f4de0d0ed85ba0e6.png "[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,2,1,|,0,0,1]]")
 (Soustraire 2 fois la deuxième ligne de la troisième ligne) :
(Soustraire 2 fois la deuxième ligne de la troisième ligne) :
![[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5463455d45da23534d698a502a4a1a0e.png "[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]")
 (Soustraire 3 fois la troisième ligne de la première ligne) :
(Soustraire 3 fois la troisième ligne de la première ligne) :
![[[1,0,0,|,19,6,-3],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/49d0a39903e06da7c7fad95903465b31.png "[[1,0,0,|,19,6,-3],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]")
Puisqu’on a réussi à transformer le côté gauche de la matrice augmentée en matrice identité, l’inverse de la matrice A existe et est donné par le côté droit de la matrice augmentée :
![A^-1=[[19,6,-3],[3,1,0],[-6,-2,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/de9d9d2d34e1628b4b981e8efbcf57aa.png "A^-1=[[19,6,-3],[3,1,0],[-6,-2,1]]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=240
La différentiation et l’intégration des matrices sont importantes dans le contexte des systèmes d’équations différentielles linéaires, en particulier pour trouver la solution de systèmes non homogènes.
La différenciation d’une matrice dont les éléments sont des fonctions implique de prendre la dérivée de chaque élément de la matrice individuellement. Considérons la matrice ") dont les éléments sont une fonction de
dont les éléments sont une fonction de  .
.
![A(t) = [[a_11(t), a_12(t) ,..., a_(1n)(t)],[a_21(t),a_22(t), ..., a_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a_(m1)(t), a_(m2)(t) , ..., a_(mn)(t) ] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6e1e8cd5a20fd4abfc96f87adc5a1e39.png "A(t) = [[a_11(t), a_12(t) ,..., a_(1n)(t)],[a_21(t),a_22(t), ..., a_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a_(m1)(t), a_(m2)(t) , ..., a_(mn)(t) ] ]")
La dérivée de par rapport à , notée ") ou
ou /(dt)") , est une matrice de la même taille dont chaque élément est la dérivée de l’élément correspondant de .
, est une matrice de la même taille dont chaque élément est la dérivée de l’élément correspondant de .
![A'(t) = [[a'_11(t), a'_12(t) ,..., a'_(1n)(t)],[a'_21(t),a'_22(t), ..., a'_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a'_(m1)(t), a'_(m2)(t) , ..., a'_(mn)(t)] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6dea4b2fd091d4ac8bb1c3bc5e4634a2.png "A'(t) = [[a'_11(t), a'_12(t) ,..., a'_(1n)(t)],[a'_21(t),a'_22(t), ..., a'_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a'_(m1)(t), a'_(m2)(t) , ..., a'_(mn)(t)] ]")
Les règles standard de différenciation, y compris la règle du produit, la règle du quotient et la règle de la chaîne, s’appliquent à chaque élément de la matrice.
L’intégration d’une matrice avec des éléments qui ont des fonctions est similaire à la différenciation et se fait par éléments. L’intégrale d’une matrice sur une variable est une matrice de la même taille dont chaque élément est l’intégrale de l’élément correspondant de .
![intA(t)dt = [[inta_11(t)dt, inta_12(t)dt ,..., inta_(1n)(t)dt],[inta_21(t)dt,inta_22(t)dt, ..., inta_(2n)(t)dt], [vdots,vdots ,ddots, vdots] ,[inta_(m1)(t)dt, inta_(m2)(t)dt , ..., inta_(mn)(t)dt ] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a69188820d8bc3b4651e71bf65c1a4a1.png "intA(t)dt = [[inta_11(t)dt, inta_12(t)dt ,..., inta_(1n)(t)dt],[inta_21(t)dt,inta_22(t)dt, ..., inta_(2n)(t)dt], [vdots,vdots ,ddots, vdots] ,[inta_(m1)(t)dt, inta_(m2)(t)dt , ..., inta_(mn)(t)dt ] ]")
Évaluer l’intégrale de la matrice par rapport à .
![A(t) = [(4 e^(4t) , 3te^(-t^2)) , (t^2cos(-3t^3) , -5t^7)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e260d44aa8962acbcfca944b87561594.png "A(t) = [(4 e^(4t) , 3te^(-t^2)) , (t^2cos(-3t^3) , -5t^7)]")
L’intégrale de matrices est une opération qui s’effectue par éléments.
![intA(t)dt=[intA_(ij)(t)dt]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fb91f39a2056595334eae944258f2529.png "intA(t)dt=[intA_(ij)(t)dt]")
![=[(int4 e^(4t) dt, int3te^(-t^2)dt) , (intt^2cos(-3t^3)dt , int-5t^7dt)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f1c6b4f5306a593ff3b874f5b9804f42.png "=[(int4 e^(4t) dt, int3te^(-t^2)dt) , (intt^2cos(-3t^3)dt , int-5t^7dt)]")
![=[(e^(4t) , -3/2e^(-t^2)) , (-1/9sin(-3t^3) , -5/8t^8)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/50141623c3722d9c48bd8303ee2119b1.png "=[(e^(4t) , -3/2e^(-t^2)) , (-1/9sin(-3t^3) , -5/8t^8)]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=240
![A = [(0,-3,3),(3,4,-3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9c7f56b004d3b9448921f07fbd3462ce.png "A = [(0,-3,3),(3,4,-3)]") et
et ![B = [(-4,0,-4),(-3,0,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/95aa11af9c8a881c3754d1730352c887.png "B = [(-4,0,-4),(-3,0,0)]") , trouve la matrice
, trouve la matrice  .
. ![C=[(16,-6,22),(18,8,-6)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/933567a6b900f6463406f0a8ff69f2fb.png "C=[(16,-6,22),(18,8,-6)]")
![A = [(-8,3),(21,-8)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8ca06309b54ecd2ae6eed2138a520042.png "A = [(-8,3),(21,-8)]") .
. ![A^-1=[(-8,-3),(-21,-8)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8d91dc28a86a262c2cc118705da3f82a.png "A^-1=[(-8,-3),(-21,-8)]")
![A = [(3,2,0),(1,1,0),(-2,-4,1)].](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f80f4c1e98677cc5f6a6e40e74b0bb53.png "A = [(3,2,0),(1,1,0),(-2,-4,1)].")
![A^-1=[(1,-2,0),(-1,3,0),(-2,8,1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e8431e8128873efe5cc9d3e68fc9db33.png "A^-1=[(1,-2,0),(-1,3,0),(-2,8,1)]")
![A=[(5,-5),(-2,-4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0ff891b46255ec44d23ca47143f01224.png "A=[(5,-5),(-2,-4)]") et
et ![B=[(-2,1),(4,4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9f58131b885d5330d7042f85dc67f65f.png "B=[(-2,1),(4,4)]") , trouve leur multiplication .
, trouve leur multiplication . ![AB=[(-30,-15),(-12,-18)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f76e039cfee5d994aa88a388a7d28eac.png "AB=[(-30,-15),(-12,-18)]")
![A(t) = [(-2 e^(4t) , 3te^(-3t^2)) , (-5tsin(4t^2) , -7t^-5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/029f698df95cca3a671f439f947c3a7a.png "A(t) = [(-2 e^(4t) , 3te^(-3t^2)) , (-5tsin(4t^2) , -7t^-5)]")
Évaluer l’intégrale de par rapport à .

![[(-1/2 e^(4t) , -1/2e^(-3t^2)) , (5/8cos(4t^2) , 7/4t^-4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4c148808d817bdb08a167f798b55340b.png "[(-1/2 e^(4t) , -1/2e^(-3t^2)) , (5/8cos(4t^2) , 7/4t^-4)]")
29
La résolution de systèmes d’équations linéaires est un aspect fondamental de l’algèbre linéaire. Pour résoudre efficacement ces systèmes, on les exprime souvent sous forme matricielle. Prenons un système d’équations linéaires
x_n=b_1),(a_21x_1+a_22x_2+...+a_(2n)x_n=b_2 ),(\ \ \ \...),(\ \ \ \...),(\ \ \ \...),(a_(m1)x_1+a_(m2)x_2+...+a_(m\n)x_n=b_m ) :}")
Ce système peut être représenté sous cette forme matricielle
![[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fd01831660b27cbc3917318d29e7212d.png "[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]")
![[[x_1],[x_2], [vdots] ,[x_n] ]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d2d7f9db47967f1b580faa26dc51b130.png "[[x_1],[x_2], [vdots] ,[x_n] ]=")
![[[b_1],[b_2], [vdots] ,[b_m] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/776f8619e2ba6d1801963d58a8560cc5.png "[[b_1],[b_2], [vdots] ,[b_m] ]")
qui est simplement transcrite
 = bb(b)")
Ici, est la matrice coefficient comportant les coefficients des variables du système, ") est le vecteur (matrice colonne) représentant les variables et
est le vecteur (matrice colonne) représentant les variables et ") est le vecteur (matrice colonne) représentant les constantes du côté droit de chaque équation. Si tous les termes constants du vecteur sont nuls, alors le système d’équations linéaires constitue un système homogène. À l’inverse, si une quelconque constante de n’est pas nulle, le système est non homogène.
est le vecteur (matrice colonne) représentant les constantes du côté droit de chaque équation. Si tous les termes constants du vecteur sont nuls, alors le système d’équations linéaires constitue un système homogène. À l’inverse, si une quelconque constante de n’est pas nulle, le système est non homogène.
Pour simplifier ce système, on peut utiliser une matrice augmentée, qui combine la matrice coefficient et le vecteur constant en une seule et même matrice. Il suffit pour ce faire d’ajouter en colonne supplémentaire à .
![[[a_11, a_12 ,..., a_(1n),|,b_1],[a_21,a_22, ..., a_(2n),|,b_2], [vdots,vdots ,ddots, vdots,|,vdots] ,[a_(m1), a_(m2) , ..., a_(mn),|,b_m] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8e1016c8e094d7167781189dc97e8c01.png "[[a_11, a_12 ,..., a_(1n),|,b_1],[a_21,a_22, ..., a_(2n),|,b_2], [vdots,vdots ,ddots, vdots,|,vdots] ,[a_(m1), a_(m2) , ..., a_(mn),|,b_m] ]")
On effectue ensuite des opérations de ligne afin de simplifier systématiquement cette matrice augmentée, en préservant l’équivalence du système. Le but est d’obtenir soit une forme échelonnée en lignes (FEL) ou une forme échelonnée réduite en lignes (FERL). La FEL, obtenue grâce à la méthode d’élimination de Gauss, simplifie la matrice en une forme triangulaire supérieure où toutes les lignes non nulles sont situées au-dessus des lignes de tous les zéros et où chaque coefficient principal (premier nombre non nul dans une ligne) est à droite du coefficient principal de la ligne du dessus. La FERL, obtenue grâce à la méthode d’élimination de Gauss-Jordan, simplifie encore la FEL de sorte que chaque coefficient principal est le seul nombre non nul de sa colonne et est égal à 1, ce qui facilite la lecture des solutions directement à partir de la matrice.
La solution du système dépend de la forme finale de la matrice augmentée après application des opérations de ligne :
 ), alors le système est cohérent et a une solution unique. ), alors le système est incohérent et n’a pas de solution.
), alors le système est cohérent et a une solution unique. ), alors le système est incohérent et n’a pas de solution.  ), alors le système à un nombre infini de solutions. En ce cas, la solution est généralement exprimée sous forme paramétrique. Ce cas se présente normalement lorsqu’il y a moins d’équations indépendantes que de variables.
), alors le système à un nombre infini de solutions. En ce cas, la solution est généralement exprimée sous forme paramétrique. Ce cas se présente normalement lorsqu’il y a moins d’équations indépendantes que de variables. Il est également important de comprendre le concept d’indépendance linéaire pour résoudre des systèmes d’équations linéaires et d’équations différentielles. Il permet de déterminer si un ensemble de solutions constitue une base valide pour l’espace des solutions et si les solutions sont uniques et couvrent l’ensemble de l’espace des solutions.
Un ensemble de vecteurs dans un espace vectoriel est dit linéairement indépendant si aucun vecteur de l’ensemble ne peut être écrit comme une combinaison linéaire des autres. Considérons un ensemble de vecteurs
_1, bb(v)_2, ..., bb(v)_n }.")
Les vecteurs sont linéairement indépendants si la seule solution à l’équation

est  , où
, où  est le vecteur nul et
est le vecteur nul et  sont des constantes. Autrement dit, aucun des vecteurs ne peut être exprimé sous forme de combinaison linéaire des autres vecteurs. S’il existe au moins une solution non triviale (où tous les
sont des constantes. Autrement dit, aucun des vecteurs ne peut être exprimé sous forme de combinaison linéaire des autres vecteurs. S’il existe au moins une solution non triviale (où tous les  ne sont pas nuls) à cette équation, alors les vecteurs sont linéairement dépendants. Autrement dit, un des vecteurs au moins de l’ensemble peut être écrit comme une combinaison linéaire des autres segments.
ne sont pas nuls) à cette équation, alors les vecteurs sont linéairement dépendants. Autrement dit, un des vecteurs au moins de l’ensemble peut être écrit comme une combinaison linéaire des autres segments.
Pour vérifier l’indépendance ou la dépendance linéaire, on peut représenter ce système sous cette forme matricielle
=bb(0)")
où  est une matrice dont les colonnes sont les vecteurs de l’ensemble.
est une matrice dont les colonnes sont les vecteurs de l’ensemble.
avec ces vecteurs comme colonnes. L’ensemble de vecteurs est linéairement indépendant si le déterminant de n’est pas nul. Si le déterminant est nul, les vecteurs sont linéairement dépendants. une forme échelonnée en lignes (FEL) ou une forme échelonnée réduite en lignes (FERL). Si une colonne dans n’a pas de coefficient principal 1 (pivot), les vecteurs sont linéairement dépendants.Si les vecteurs sont ainsi linéairement dépendants, la relation spécifique entre eux peut être déterminée en résolvant le système pour les constantes  .
.
Déterminer si l’ensemble de vecteurs donné est linéairement indépendant ou dépendant. En cas de dépendance linéaire,trouver la relation exacte entre les vecteurs.
![bb v_1=[(1),( 5),(1)], \ bb v_2=[( -1),( 7),(-1)], \ bb v_3=[( 6),( 0),(9)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8a672315642bdbcbaa65a052ea25f27a.png "bb v_1=[(1),( 5),(1)], \ bb v_2=[( -1),( 7),(-1)], \ bb v_3=[( 6),( 0),(9)]")
Pour tester l’indépendance linéaire d’un ensemble de vecteurs, il faut d’abord former une matrice avec ces vecteurs en colonnes, puis déterminer si les déterminants sont non nuls.
![V=[[1,-1,6],[5,7,0],[1,-1,9]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/41b4721fb4b9fac2004ddb716260bedb.png "V=[[1,-1,6],[5,7,0],[1,-1,9]]")
=36")
Le déterminant n’est pas nul, donc les vecteurs sont linéairement indépendants.
Déterminer si l’ensemble de vecteurs donné est linéairement indépendant ou dépendant. S’il est dépendant, trouver la relation exacte entre les vecteurs.
![bb v_1=[(5),( 6),(-10)], \ bb v_2=[( 1),( -1),(-2)], \ bb v_3=[( 4),( -2),(-8)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/579c8f4d966d22e0388c77eb8d373a1e.png "bb v_1=[(5),( 6),(-10)], \ bb v_2=[( 1),( -1),(-2)], \ bb v_3=[( 4),( -2),(-8)]")
Pour tester l’indépendance linéaire d’un ensemble de vecteurs, il faut d’abord former une matrice avec ces vecteurs en colonnes
![V=[[5,1,4],[6,-1,-2],[-10,-2,-8]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0a3f1607a117aca2d4a8405e66eac902.png "V=[[5,1,4],[6,-1,-2],[-10,-2,-8]]")
En calculant le déterminant de , on trouve
=0")
Comme le déterminant est nul, les vecteurs sont linéairement dépendants.
Pour trouver la relation entre les vecteurs, on résout le système .
On forme ensuite la matrice augmentée, puis on réduit les lignes pour la simplifier.
![[[5,1,4,|,0],[6,-1,-2,|,0],[-10,-2,-8,|,0]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ab401bba7e2c50eac1163e4cbc7d787a.png "[[5,1,4,|,0],[6,-1,-2,|,0],[-10,-2,-8,|,0]]")
En appliquant des opérations de ligne pour donner une forme FERL à la matrice, on obtient
![[[1,0,2/11,|,0],[0,1,34/11,|,0],[0,0,0,|,0]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/af5881d02157986618fa9b1b9122ac7e.png "[[1,0,2/11,|,0],[0,1,34/11,|,0],[0,0,0,|,0]]")
La troisième colonne n’a pas de coefficient principal 1 (pivot), ce qui indique que  est une variable libre.
est une variable libre.
En convertissant la première ligne de la FERL en équation, on obtient

 » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> 
En convertissant la deuxième ligne de la FERL en équation, on obtient
 » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> 
En choisissant  pour simplifier, on trouve
pour simplifier, on trouve
=-2")
=-34")
la relation entre les vecteurs de l’ensemble est donc
+c_2 bb(v_2)+c_3 bb(v_3)=bb(0)")
-34bb(v_2)+11bb(v_3)=bb(0)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=242
,(-x+3y+2z = -6),(-4x+4y-z = -14):}")

dont les colonnes sont les vecteurs et en calculant le déterminant de .![bb(v_1)=[(5),( 6),(-10)], \ bb(v_2)=[( 2),( 1),(-4)], \ bb(v_3)=[( -2),( 0),(6)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7a1bcf40e9220baa52784f769b854ad6.png "bb(v_1)=[(5),( 6),(-10)], \ bb(v_2)=[( 2),( 1),(-4)], \ bb(v_3)=[( -2),( 0),(6)]") |
=-14")
Le déterminant n’étant pas nul, les vecteurs sont linéairement indépendants.
dont les colonnes sont les vecteurs et en calculant le déterminant de .![bb (v_1)=[(6),( 2),(-18)], \ bb (v_2)=[( 4),( 1),(-12)], \ bb (v_3)=[( 0),( -3),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b1efea50c60c6ea4e9f3c8c6dfe3cfb4.png "bb (v_1)=[(6),( 2),(-18)], \ bb (v_2)=[( 4),( 1),(-12)], \ bb (v_3)=[( 0),( -3),(0)]") |
Comme le déterminant est nul, les vecteurs sont linéairement dépendants.
30
Il est essentiel de comprendre les valeurs propres et les vecteurs propres pour résoudre des systèmes d’équations différentielles, en particulier pour trouver les solutions de systèmes homogènes. Cette section passe en revue ces concepts et explique comment les trouver.
Considérons une matrice carrée de taille et un vecteur ") avec éléments. En multipliant la matrice par le vecteur , on obtient un nouveau vecteur
avec éléments. En multipliant la matrice par le vecteur , on obtient un nouveau vecteur ") avec éléments. Géométriquement, cette opération peut être vue comme la transformation du vecteur par la matrice , qui peut impliquer une rotation, une dilatation, une réflexion ou une combinaison de ces éléments, en fonction des propriétés de . Le vecteur ainsi obtenu peut différer en direction et en magnitude du vecteur original .
avec éléments. Géométriquement, cette opération peut être vue comme la transformation du vecteur par la matrice , qui peut impliquer une rotation, une dilatation, une réflexion ou une combinaison de ces éléments, en fonction des propriétés de . Le vecteur ainsi obtenu peut différer en direction et en magnitude du vecteur original .
Dans de nombreuses applications, on recherche un scalaire spécial  et un vecteur non nul correspondant de façon à ce que, lorsque la matrice multiplie , le résultat soit un scalaire multiple de , et non un nouveau vecteur. La relation est exprimée sous la forme
et un vecteur non nul correspondant de façon à ce que, lorsque la matrice multiplie , le résultat soit un scalaire multiple de , et non un nouveau vecteur. La relation est exprimée sous la forme
En ce cas, le scalaire  est appelé valeur propre, tandis que le vecteur
est appelé valeur propre, tandis que le vecteur  est le vecteur propre de la matrice . Une valeur propre représente donc le facteur par lequel un vecteur propre est dilaté lorsqu’il subit la transformation linaire représentée par .
est le vecteur propre de la matrice . Une valeur propre représente donc le facteur par lequel un vecteur propre est dilaté lorsqu’il subit la transformation linaire représentée par .
Pour trouver les valeurs propres de la matrice , il faut résoudre l’équation de la section 6.3.1 pour un non nul. En réécrivant l’équation, on obtient
")
")
bb{v} =bb(0)")
Ici, est la matrice identité de la même taille que . Le déterminant de  doit être nul pour que ce système ait des solutions non triviales. On définit
doit être nul pour que ce système ait des solutions non triviales. On définit =det(A-lambda I)") comme lepolynôme caractéristique de la matrice . Les racines du polynôme caractéristique sont les valeurs propres, ce qui peut être exprimé sous la forme
comme lepolynôme caractéristique de la matrice . Les racines du polynôme caractéristique sont les valeurs propres, ce qui peut être exprimé sous la forme
 = 0.") (6.3.2)
(6.3.2)
Une fois les valeurs propres déterminées, les vecteurs propres correspondants sont obtenus en résolvant le système pour chaque valeur propre . Ces vecteurs ne sont pas uniques, car tout multiple scalaire d’un vecteur propre est aussi un vecteur propre valide.
est une valeur propre complexe avec un vecteur propre associé , alors  (le conjugué complexe de ) est aussi une valeur propre, avec pour vecteur propre correspondant
(le conjugué complexe de ) est aussi une valeur propre, avec pour vecteur propre correspondant  (le conjugué complexe de ).
(le conjugué complexe de ).Pour la matrice donnée, a) trouver le polynôme caractéristique de la matrice et b) toutes les valeurs propres et leurs vecteurs propres associés.
![A=[(3,5),(1,-1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d74d05e7a2fc9b33ae87796160f24505.png "A=[(3,5),(1,-1)]")

![=[(3,5),(1,-1)] -lambda[(1,0),(0,1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f80f822493de27f66e3b49135fe0a5d3.png "=[(3,5),(1,-1)] -lambda[(1,0),(0,1)]")
![=[(3-lambda,5),(1,-1-lambda) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4de0cca10041955f4b0ff7bfdeaeb87d.png "=[(3-lambda,5),(1,-1-lambda) ]")
Le polynôme caractéristique de est
,(1,-1-lambda) |")
(lambda+1)-5")

(lambda+2)")
b) Les racines de ") , à savoir
, à savoir  et
et  , sont les valeurs propres de . Pour trouver les vecteurs propres correspondants, il faut trouver la solution du système
, sont les valeurs propres de . Pour trouver les vecteurs propres correspondants, il faut trouver la solution du système bb(u)=bb(0)") pour chaque valeur propre.
pour chaque valeur propre.
Pour , on a
![[(3-lambda_1,5),(1,-1-lambda_1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6ef987f624902a983a183e7b0b8e55a3.png "[(3-lambda_1,5),(1,-1-lambda_1)]")
![[(u_1),(u_2)]=[(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e9b1c0442c96e0d85aaf52b869bdcbfa.png "[(u_1),(u_2)]=[(0),(0)]")
![[(3-4,5),(1,-1-4) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/707d89bbf1e3155fe2c65357ab93b0ee.png "[(3-4,5),(1,-1-4) ]")
![[(-1,5),(1,-5) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4fdd357d7663611bd8e8a14ce8a823ab.png "[(-1,5),(1,-5) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(-1,5,|,0),(1,-5,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c7f27a0f136a71e397bacd19f7d93af3.png "[(-1,5,|,0),(1,-5,|,0) ]")

![[(1,-5,|,0),(-1,5,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a8c5ad9a1a1f3f4bd2596159b50628da.png "[(1,-5,|,0),(-1,5,|,0) ]")
 )
) ![[(1,-5,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/97c2f67c1b292ae52ab2bd38f61f1f63.png "[(1,-5,|,0),(0,0,|,0) ]")
La deuxième colonne n’a pas de pivot 1, donc  est une variable libre. On représente généralement la variable libre par un paramètre, par exemple . On écrit alors
est une variable libre. On représente généralement la variable libre par un paramètre, par exemple . On écrit alors  et en fonction du paramètre .
et en fonction du paramètre .



Ainsi, la solution générale est ![bb(u_1)=[(u_1),(u_2)]=t[(5),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8b126cb4ca21bfcebdc24d9a9435b197.png "bb(u_1)=[(u_1),(u_2)]=t[(5),(1)]") , où est un nombre réel non nul arbitraire. On recherche généralement un vecteur propre basique (sans paramètre). On peut choisir une valeur pour pour trouver un vecteur propre basique. En utilisant
, où est un nombre réel non nul arbitraire. On recherche généralement un vecteur propre basique (sans paramètre). On peut choisir une valeur pour pour trouver un vecteur propre basique. En utilisant  , le vecteur propre correspondant à est
, le vecteur propre correspondant à est ")
![=[(5),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/945c3e3d85b1cddd3e6489a0aed8ad94.png "=[(5),(1)]") .
.
Pour , on a
![[(3-lambda_2,5),(1,-1-lambda_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/611a138f9809e0247ce43bfc7af8009e.png "[(3-lambda_2,5),(1,-1-lambda_2)]")
![[(3+2,5),(1,-1+2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/155fa47df0e5a0de95b157cdeb73d229.png "[(3+2,5),(1,-1+2) ]")
![[(5,5),(1,1) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3e852eaa6723a3ea234376260d10316a.png "[(5,5),(1,1) ]")
Là encore, pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
La solution générale est
![bb(u_2)=[(u_1),(u_2)]=t[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4454399dcd1e61e1538e284fc960e4de.png "bb(u_2)=[(u_1),(u_2)]=t[(-1),(1)]")
où est un nombre réel non nul arbitraire. En utilisant , le vecteur propre basique correspondant à est ")
![=[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/498f3f35f1049be0a6f6a50ecc2365de.png "=[(-1),(1)]") .
.
Les deux valeurs propres sont des valeurs propres simples avec une multiplicité algébrique de 1 et, par conséquent, leurs vecteurs propres sont linéairement indépendants.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=244
Pour la matrice donnée, a) trouver le polynôme caractéristique de la matrice et b) toutes les valeurs propres et leurs vecteurs propres associés.
![A=[(-7,-1),(5,-9)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/92dde544a0e44c46593b10fa6a3ff8a2.png "A=[(-7,-1),(5,-9)]")
![=[(-7,-1),(5,-9)] -lambda[(1,0),(0,1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/142265c7f50c7cdc32aa99c4cbf698e7.png "=[(-7,-1),(5,-9)] -lambda[(1,0),(0,1)]")
![=[(-7-lambda,-1),(5,-9-lambda)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d2783928d985cc6e6ff2304dec57d000.png "=[(-7-lambda,-1),(5,-9-lambda)]")
Le polynôme caractéristique de est
,(5,-9-lambda) |")
(9+lambda)+5")

En complétant le carré, on obtient
^2+4")
b) Les racines de sont les valeurs propres de .
^2+4=0")
^2=-4")


Ensuite, pour trouver les vecteurs propres correspondants, on suit les mêmes étapes que dans l’exemple précédent, en résolvant le système . Cependant, comme les valeurs propres sont des conjugués complexes, leurs vecteurs propres correspondants seront aussi des conjugués. Par conséquent, on doit seulement trouver le vecteur propre associé à l’une des valeurs propres.
On trouve le vecteur propre associé à  .
.
![[(-7-(-8-2i),-1),(5,-9-(-8-2i)) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ec87112680bc523e491ba8c450510a1a.png "[(-7-(-8-2i),-1),(5,-9-(-8-2i)) ]")
![[(1+2i,-1),(5,-1+2i) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e1601a94e659c5eb5a717748fcc93f87.png "[(1+2i,-1),(5,-1+2i) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(1+2i,-1 ,|,0),(5,-1+2i ,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/172bc144b97c324bf6fc74cf0afe93fa.png "[(1+2i,-1 ,|,0),(5,-1+2i ,|,0) ]")
 )
) ![[(5,-1+2i ,|,0),(5,-1+2i ,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dafb15e6dae4d39c3bd7e25f8bac65dc.png "[(5,-1+2i ,|,0),(5,-1+2i ,|,0) ]")

![[(5,-1+2i ,|,0) ,(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/962d1b76c8c6dd9f1679c916d2df1277.png "[(5,-1+2i ,|,0) ,(0,0,|,0) ]")
 ) »
) » ![[(1,-1/5+2/5i ,|,0) ,(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2b56063ac13ddd09cd5df5819b10f3f5.png "[(1,-1/5+2/5i ,|,0) ,(0,0,|,0) ]")
La deuxième colonne n’a pas de pivot 1, donc est une variable libre. On représente généralement la variable libre par un paramètre . On écrit alors et en fonction du paramètre .
u_2=0")
 )
) t")
Donc, les vecteurs propres correspondant à la valeur propre sont ![bb(u_1)=t[(1/5-2/5i ),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/28c654a0e37af8671a1ed18dabca4afd.png "bb(u_1)=t[(1/5-2/5i ),(1)]") pour
pour  . Avec
. Avec  , on a
, on a
![bb(u_1)=[(1-2i),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9069c527ffce7cfb3a46fe00e1af06a1.png "bb(u_1)=[(1-2i),(5)]")
![=[(1),(5)]-i[(2),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/93313608f4248b67e1e5773f42a6f41a.png "=[(1),(5)]-i[(2),(0)]")
Le vecteur propre correspondant à la valeur propre conjuguée est le conjugué du vecteur propre . Ainsi, le vecteur propre associé à la valeur propre  est
est
![=[(1+2i),(5)] =[(1),(5)]+i[(2),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/66c7a07f16a4c8197d6a45c04949d0fd.png "=[(1+2i),(5)] =[(1),(5)]+i[(2),(0)]")
Les deux valeurs propres sont des valeurs propres simples avec une multiplicité algébrique de 1 et, par conséquent, leurs vecteurs propres sont linéairement indépendants.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=244
Pour la matrice donnée, a) trouver le polynôme caractéristique de la matrice et b) toutes les valeurs propres et leurs vecteurs propres associés.
![A=[(0,6,-2),(0,-2,0),(1,3,-3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/881e53e10622ef2b0b8159be78b4d4c0.png "A=[(0,6,-2),(0,-2,0),(1,3,-3)]")
![=[(0,6,-2),(0,-2,0),(1,3,-3)] -lambda[(1,0,0),(0,1,0),(0,0,1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/20463cc54c4241196234c4401dfc8fe1.png "=[(0,6,-2),(0,-2,0),(1,3,-3)] -lambda[(1,0,0),(0,1,0),(0,0,1)]")
![=[(-lambda,6,-2),(0,-2-lambda,0) ,(1,3,-3-lambda)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/36f6d1828b1d58e8b25050b18da0dcc6.png "=[(-lambda,6,-2),(0,-2-lambda,0) ,(1,3,-3-lambda)]")
Le polynôme caractéristique de est
,(0,-2-lambda,0) ,(1,3,-3-lambda) |")
 ,(3,-3-lambda) |+|(6,-2),(-2-lambda,0) |")
(-3-lambda)-(-2-lambda)(-2)")
(lambda^2+3lambda+2)")
^2(lambda+1)")
Les racines de , =-2") , avec une multiplicité de 2, et
, avec une multiplicité de 2, et  , avec une multiplicité de 1, sont les valeurs propres de .
, avec une multiplicité de 1, sont les valeurs propres de .
Pour trouver les vecteurs propres correspondants, il faut trouver la solution du système pour chaque valeur propre, comme dans l’exemple précédent.
Pour , on a
,(0,-2-lambda,0) ,(1,3,-3-lambda) |")
![[(u_1),(u_2),(u_3)]=[(0),(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6dc2224125889777fa8b76b924f340f7.png "[(u_1),(u_2),(u_3)]=[(0),(0),(0)]")
,(0,-2+2,0) ,(1,3,-3+2) |")
,(0,0,0) ,(1,3,-1) |")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
 )
) ,(1,3,-1),(0,0,0) |")

,(2,6,-2) ,(0,0,0) |")

,(0,0,0) ,(0,0,0) |")
Les deuxième et troisième colonnes n’ayant pas de pivot 1, et  sont des variables libres. On fait en sorte que et soient représentés par les paramètres
sont des variables libres. On fait en sorte que et soient représentés par les paramètres  et , respectivement. On écrit alors en fonction de ces paramètres.
et , respectivement. On écrit alors en fonction de ces paramètres.




Le vecteur propre )") peut donc être exprimé sous la forme
peut donc être exprimé sous la forme
![bb(u_(1,2))=[(u_1),(u_2),(u_3)]=[(-3s+t),(s),(t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5eb7dda41f187583ddd4cda7782acfec.png "bb(u_(1,2))=[(u_1),(u_2),(u_3)]=[(-3s+t),(s),(t)]")
![=s[(-3),(1),(0)]+t[(1),(0),(1)],](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8fae2282abafc7021bf4819558871b5f.png "=s[(-3),(1),(0)]+t[(1),(0),(1)],")
 en même temps
en même temps
où et ne peuvent pas être nuls en même temps, car cela donnerait un vecteur nul et les vecteurs propres ne sont jamais nuls. L’espace propre est traversé par deux vecteurs ![{[(-3),(1),(0)], \ [(1),(0),(1)]}](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/33ecad6b9640b39a6c959b4dded2c3b2.png "{[(-3),(1),(0)], \ [(1),(0),(1)]}") .
.
Les vecteurs propres basiques associés à la valeur propre ") sont donc
sont donc ![bb(u_1)=[(-3),(1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/90a421ec164449e262f65db7fe7f8152.png "bb(u_1)=[(-3),(1),(0)]") et
et ![bb(u_2)= [(1),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0904e4682f9649980fb1bd2811d4a26b.png "bb(u_2)= [(1),(0),(1)]") .
.
Pour , on a
,(0,-1,0) ,(1,3,-2) |")
Là encore, pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
 )
) ,(0,-1,0) ,(0,-3,0) |")

,(0,1,0) ,(0,-3,0) |")
 )
),(0,1,0) ,(0,0,0) |")

,(0,1,0) ,(0,0,0) |")
La troisième colonne n’a pas de pivot 1, donc est une variable libre. On représente généralement la variable libre par un paramètre . On écrit alors et en fonction du paramètre .



Le vecteur propre ") peut ainsi être exprimé sous la forme
peut ainsi être exprimé sous la forme
![bb(u_3)=[(u_1),(u_2),(u_3)]=[(2t),(0),(t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5485e3cbebd273822649958c01dd7d0d.png "bb(u_3)=[(u_1),(u_2),(u_3)]=[(2t),(0),(t)]")
![=t[(2),(0),(1)],](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/300b69b36adaae1c44dfde90aef93e62.png "=t[(2),(0),(1)],")
, le vecteur propre correspondant à est ![=[(2),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/aeae6f8f8372c9300c3f9e442f2e4500.png "=[(2),(0),(1)]") .
.Pour les deux valeurs propres, la multiplicité algébrique est égale à la multiplicité géométrique et leurs vecteurs propres sont donc linéairement indépendants.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=244
![[(0,-5),(4,6)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ddbeb1694f9b15a9a6a780b35c95155a.png "[(0,-5),(4,6)]") .
.
=")
")
![[(5,2,8),(-4,-1,-16),(0,0,3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/87f33c85ec451b606bccbb123823e68d.png "[(5,2,8),(-4,-1,-16),(0,0,3)]") .
. ![lambda_1=1, \ bb(v_1)=[(-1),(2),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9954daa4b3be8131b181e8aa3bdfb674.png "lambda_1=1, \ bb(v_1)=[(-1),(2),(0)]") ou n’importe quel multiple scalaire.
ou n’importe quel multiple scalaire.
![lambda_(2,3)=3, \ bb(v_2)=[(-1),(1),(0)], \ bb(v_3)=[(-4),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/088d28733e9d2add8c65a34e6a8dff53.png "lambda_(2,3)=3, \ bb(v_2)=[(-1),(1),(0)], \ bb(v_3)=[(-4),(0),(1)]") ou n’importe quel multiple scalaire.
ou n’importe quel multiple scalaire.
![[(-5,-4),(14,10)].](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/953e9e4555d90d812a5642717ce90a03.png "[(-5,-4),(14,10)].")
![lambda_1=3, \ bb(v_1)=[(1),(-2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cd6a3374be1cafd5ceed9426ec9cdbe4.png "lambda_1=3, \ bb(v_1)=[(1),(-2)]") ou n’importe quel multiple scalaire.
ou n’importe quel multiple scalaire.
![lambda_2=2, \ bb(v_2)=[(4),(-7)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/093ea8ebff350734b07ee92daa2f62c8.png "lambda_2=2, \ bb(v_2)=[(4),(-7)]") ou n’importe quel multiple scalaire.
ou n’importe quel multiple scalaire.
31
Après avoir exploré les équations différentielles du premier ordre et du second ordre, intéressons-nous maintenant aux systèmes d’équations différentielles. Ces systèmes permettent de modéliser des scénarios comportant de multiples processus interdépendants, ce qui est courant dans les situations complexes du monde réel.
Par exemple, dans un écosystème où interagissent des espèces comme les proies et les prédateurs, le taux de variation de la population de chaque espèce dépend non seulement de sa taille, mais aussi des populations d’autres espèces. Cette interaction conduit à un système d’équations différentielles, où chaque équation représente le taux de croissance d’une espèce, incarnant leurs interrelations. De même, dans les problèmes de mélanges avec des réservoirs interconnectés, la concentration dans un réservoir affecte et est affectée par les concentrations dans les réservoirs connectés. Dans les systèmes mécaniques, tels qu’un système masse-ressort à multiples masses et ressorts, le déplacement de chaque masse est influencé par ses voisines, formant un système d’équations différentielles interconnectées.
Cette section présente la méthode matricielle pour résoudre des systèmes d’équations différentielles linéaires du premier ordre. Ces systèmes sont caractérisés par le fait que chaque équation est du premier ordre et linéaire. Ils peuvent être écrits sous la forme suivante :
y_n+f_1(t)),(y'_2=a_21y_1+a_22y_2+...+a_(2n)y_n+f_2(t) ),(vdots),(y'_n=a_(n1)y_1+a_(n2)y_2+...+a_(n\n)y_n+f_n(t) ) :}")
La notation matricielle simplifie la caractérisation et la résolution de ces systèmes, de la même manière que les systèmes d’équations algébriques. Un système linéaire du premier ordre peut être exprimé sous forme de matrice comme suit :
![[[y'_1],[y'_2], [vdots] ,[y'_n] ]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ccd697174769ff7d7bdbae8e78cb46af.png "[[y'_1],[y'_2], [vdots] ,[y'_n] ]=")
![[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b3cbeb5023078db66d19fce4b66d8644.png "[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]")
![[[y_1],[y_2], [vdots] ,[y_n] ]+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ebe315c7d2963a400b4e6697c0b4eb9d.png "[[y_1],[y_2], [vdots] ,[y_n] ]+")
![[[f_1],[f_2], [vdots] ,[f_n] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1bcff6840b1963b01a8954227bcfaf50.png "[[f_1],[f_2], [vdots] ,[f_n] ]")
Dans la notation vectorielle, le système est écrit comme suit :
Ici, la matrice est la matrice coefficient et ") est la fonction vectorielle de forçage. et sont continues si leurs éléments sont continus. Si
est la fonction vectorielle de forçage. et sont continues si leurs éléments sont continus. Si )=0") dans l’équation de la section 6.4.1, le système est homogène, sinon, il est non homogène.
dans l’équation de la section 6.4.1, le système est homogène, sinon, il est non homogène.
Un problème de valeur initiale suppose de trouver une solution pour
 = A(t)bb(y) + bb(f)(t),")
(t_0) = bb(k)") (6.4.2)
(6.4.2)
où  est un vecteur constant représentant la condition initiale.
est un vecteur constant représentant la condition initiale.
![veck=[[k_1],[k_2], [vdots] ,[k_n] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4e55b4ce0b94d9cb0a7f416f1c0ce1bf.png "veck=[[k_1],[k_2], [vdots] ,[k_n] ]")
Écrire le système d’équations différentielles donné sous forme matricielle.
),(y'_2=y_1+y_2+e^(2t)) :}")
Le système peut être écrit sous cette forme matricielle :
![[(y'_1),(y'_2)] =[(2,1),(1,1)][(y_1),(y_2)]+[(-3e^(2t)),(e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4b1c0d2c3e496d7fdc68dcc0df19b691.png "[(y'_1),(y'_2)] =[(2,1),(1,1)][(y_1),(y_2)]+[(-3e^(2t)),(e^(2t))]")
![bb (y)'=[(2,1),(1,1)]bb"y"+[(-3),(1)]e^(2t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6120e29dc4cbba74f61873b7de90daf9.png "bb (y)'=[(2,1),(1,1)]bb"y"+[(-3),(1)]e^(2t)")
Un problème de valeur initiale pour le système peut être écrit comme ceci :
![bb"y'"=[(2,1),(1,1)]bb"y"+[(-3),(1)]e^(2t),](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/07d626e19e96d1eb9a92ed9ccc69309f.png "bb"y'"=[(2,1),(1,1)]bb"y"+[(-3),(1)]e^(2t),")
!["y"(t_0)=[(k_0),(k_1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a4808305845881f46225b0164f6cd4da.png ""y"(t_0)=[(k_0),(k_1)]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=247
Théorème d’existence et d’unicité des solutions. Si la matrice coefficient et la fonction de forçage ") sont continues sur un intervalle ouvert comportant
sont continues sur un intervalle ouvert comportant  , alors il existe une solution unique au problème de valeur initiale suivant sur cet intervalle.
, alors il existe une solution unique au problème de valeur initiale suivant sur cet intervalle.
bb"y"+bb"f"(t),")
=bb"k"")
a) Vérifier que
![bb"y"=c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/afc4bd5a77680c0963eb20b1da9e542e.png "bb"y"=c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)")
est une solution au système suivant pour n’importe quelles valeurs de et .
![bb"y'"=[(-4,-10),(3,7)]bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/385fbc75d4bb938f7ce19133c59cebfe.png "bb"y'"=[(-4,-10),(3,7)]bb"y"")
b) Trouver la solution de la condition initiale
![bb"y'"=[(-4,-10),(3,7)]bb"y",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/643c5c88ba2fab51b2b10702925c9d9e.png "bb"y'"=[(-4,-10),(3,7)]bb"y",")
![bb"y"(0)=[(1),(-2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/26b7c7117caffaea4f07062c15efec5f.png "bb"y"(0)=[(1),(-2)]")
a) Si ") est une solution au système, alors
est une solution au système, alors =bb(y)'") .
.


![c_1[(-4,-10),(3,7)][(-5),(3)]e^(2t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3dbb67690946a8c1e7a9a334e5e54269.png "c_1[(-4,-10),(3,7)][(-5),(3)]e^(2t)")
![+c_2[(-4,-10),(3,7)] [(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5f42b9666dfda35ca48c88ea05fdda94.png "+c_2[(-4,-10),(3,7)] [(2),(-1)]e^(t)")
![=c_1[(-10),(6)]e^(2t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bebc82b97bd9485d63dda5928f55558f.png "=c_1[(-10),(6)]e^(2t)")
![+c_2[(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/633798d07769d503f5f35d0e9f0271c3.png "+c_2[(2),(-1)]e^(t)")

'=")
![c_1[(-5),(3)]d/dt( e^(2t))+c_2[(2),(-1)]d/dt( e^(t) )](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8896748e05e5bb5b7b51793a6802e8ec.png "c_1[(-5),(3)]d/dt( e^(2t))+c_2[(2),(-1)]d/dt( e^(t) )")
![=2c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/29d2171b496f5108afbbc6ac248d6d0b.png "=2c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)")
![=c_1[(-10),(6)]e^(2t)+c_2[(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9f458dc36d0a0af01fce1d26d665542f.png "=c_1[(-10),(6)]e^(2t)+c_2[(2),(-1)]e^(t)")

b) Comme la matrice coefficient est continue pour tous les nombres réels  , le théorème d’existence des solutions garantit pour le problème de valeur initiale une solution unique sur . Pour trouver les constantes et , il faut appliquer la condition initiale :
, le théorème d’existence des solutions garantit pour le problème de valeur initiale une solution unique sur . Pour trouver les constantes et , il faut appliquer la condition initiale :
![c_1[(-5),(3)]e^(0)+c_2[(2),(-1)]e^(0)=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e74b4e7534d6bdc93521f813b81c0c60.png "c_1[(-5),(3)]e^(0)+c_2[(2),(-1)]e^(0)=")
![[(1),(-2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b6c80c345d893aac080a8e1b60cd9c13.png "[(1),(-2)]")
![[(-5c_1+2c_2),(3c_1-c_2)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f5f2af3a2e2187d0fb629a248d220d7a.png "[(-5c_1+2c_2),(3c_1-c_2)]=")
Cela donne un système de deux équations dans deux variables et .
,(3c_1-c_2=-2 ):}")
En résolvant le système, on trouve


La solution du problème de valeur initiale est donc
![bb(y)=-3[(-5),(3)]e^(2t)-7[(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4cd81284cdc89aa2631bb58058ed8526.png "bb(y)=-3[(-5),(3)]e^(2t)-7[(2),(-1)]e^(t)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=247
Les équations différentielles de degré supérieur peuvent être transformées en systèmes d’équations différentielles du premier ordre. Cette conversion permet d’analyser des problèmes complexes d’ordre supérieur à l’aide de techniques et d’outils développés pour les systèmes du premier ordre. Cette approche est largement utilisée dans les méthodes numériques et l’analyse théorique dans diverses applications scientifiques et techniques. Voici un guide étape par étape de ce processus.
en un système de équations du premier ordrePrenons une équation différentielle linéaire d’ordre :
y^{(n)} + a_{n-1}(t)y^{(n-1)} + cdots + a_1(t)y' + a_0(t)y = g(t)")
1. Introduire de nouvelles variables : introduire nouvelles variables correspondant à la fonction et à ses dérivées jusqu’à l’ordre . Soit




}")
2. Exprimer les dérivées : exprimer les dérivées de ces nouvelles variables en fonction de l’équation différentielle d’origine.


} = x_n")
} = g(t) - a_{n-1}(t)y^{(n-1)} - cdots - a_1(t)y' - a_0(t)y")
On observe que la dernière équation est l’équation originale réarrangée pour la plus haute dérivée de . Dans la dernière équation, remplacer les nouvelles variables par et ses dérivées :
 - a_{n-1}(t)x_n - cdots - a_1(t)x_2 - a_0(t)x_1")
3. Écrire le système d’équations du premier ordre : on a maintenant un système de équations différentielles linéaires du premier ordre :



Écrire l’équation différentielle du second ordre donnée sous forme de système d’équations différentielles linéaires du premier ordre
,")
=1,\ y'(0)=-1")
1. Introduire une nouvelle variable  :
:


2. Exprimer les dérivées en différenciant les équations ci-dessus et réarranger l’équation différentielle originale afin d’isoler :


-2/3y'+2y") » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> 
-2/3x_2+2x_1")
On exprime aussi les conditions initiales par rapport aux nouvelles variables :
=y(0)=1")
=y'(0)=-1")
3. Le système d’équations du premier ordre est donc

")
=1, \ x_2(0)=-1")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=247
,(y_2' = 6 y_1 + 3 y_2 + 5 t^4):}")
![[(y_1'),(y_2')]=[(2,-2),(6,3)][(y_1),(y_2)]+[(-2),(5)]t^4](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/acdaa2ba77826629fe9d012fdb134d88.png "[(y_1'),(y_2')]=[(2,-2),(6,3)][(y_1),(y_2)]+[(-2),(5)]t^4")
 .
. ")

")
![[(x'),(y')] = [(3,-5),(2,4)] \ [(x),(y)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/48af37b2f7360f3cd94c24ded9a6052f.png "[(x'),(y')] = [(3,-5),(2,4)] \ [(x),(y)]")
sous la forme d’une équation différentielle du second ordre pour .

32
Commençons par étudier le système linéaire homogène
où est une matrice constante à éléments réels et est la solution triviale du système. Toute autre solution est une solution non triviale.
est la solution triviale du système. Toute autre solution est une solution non triviale.
Théorème. Si  sont solutions linéairement indépendantes au système présenté dans la section 6.5.1 et est continue sur un intervalle ouvert , alors l’ensemble
sont solutions linéairement indépendantes au système présenté dans la section 6.5.1 et est continue sur un intervalle ouvert , alors l’ensemble  est appelé ensemble fondamental de solutions au système sur .
est appelé ensemble fondamental de solutions au système sur .
Comme expliqué à la section 6.2 sur l’indépendance linéaire, les vecteurs sont linéairement indépendants si  n’a pour solution que la solution triviale. Ainsi, si
n’a pour solution que la solution triviale. Ainsi, si

![[[y_11, y_12 ,..., y_(1n)],[y_21,y_22, ..., y_(2n)], [vdots,vdots ,ddots, vdots] ,[y_(n1), y_(n2) , ..., y_(n\n)] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/210673bd528f7b46a75654b5191793d8.png "[[y_11, y_12 ,..., y_(1n)],[y_21,y_22, ..., y_(2n)], [vdots,vdots ,ddots, vdots] ,[y_(n1), y_(n2) , ..., y_(n\n)] ]")
![[[c_1],[c_2], [vdots] ,[c_n] ]=bb"0"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2b120ae9b191de4d93fb48c7d2ce0379.png "[[c_1],[c_2], [vdots] ,[c_n] ]=bb"0"")
alors ![bb"c"=[[c_1],[c_2], [vdots] ,[c_n] ]=bb"0"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/578b6b9fd0d79d52a0f08f0415c73ee2.png "bb"c"=[[c_1],[c_2], [vdots] ,[c_n] ]=bb"0"")
Pour que cette solution soit unique, le déterminant de la matrice du coefficient de l’équation dont les colonnes sont les fonctions vectorielles ![[(bb"y"_1,bb"y"_2, ..., bb"y"_n)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1a2fe1fcf4b963095fb626a316b0791e.png "[(bb"y"_1,bb"y"_2, ..., bb"y"_n)]") ne doit pas être nul. Le déterminant de la matrice du coefficient de l’équation est appelé wronskien et transcrit
ne doit pas être nul. Le déterminant de la matrice du coefficient de l’équation est appelé wronskien et transcrit ") .
.
=|bb"y"_1 \ bb"y"_2 \ ... \ bb"y"_n|")
Théorème. Si le wronkien de n’est pas nul en un point (et donc jamais nul) sur , alors est linéairement indépendant, formant un ensemble fondamental de solutions pour le système présenté à la section 6.5.1 sur . La matrice fondamentale ") du système est
du système est
=")
![[(bb"y"_1,bb"y"_2, ..., bb"y"_n)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5837101a172e7de88ce571f8e1d4566e.png "[(bb"y"_1,bb"y"_2, ..., bb"y"_n)]=")
Étant donné que les fonctions vectorielles
![bb"y"_1=[(-2),(3)]e^(3t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1fd5b4549a72bc72f0fdf85446d5ef0e.png "bb"y"_1=[(-2),(3)]e^(3t)") et
et ![bb"y"_2=[(-2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ce30498e8d09c443028da1a1df6ca37a.png "bb"y"_2=[(-2),(-1)]e^(t)")
sont des solutions d’un système à coefficient constant , a) calculer le wronkskien de  et b) trouver la solution générale du système.
et b) trouver la solution générale du système.
=|bb"y"_1 \ \ bb"y"_2|")
,-2e^t),(3e^(3t),-e^t)|")
+6e^(4t)")
")
b) Comme !=0") , sont linéairement indépendants, l’ensemble est un ensemble fondamental de solutions au système et la matrice suivante est la matrice fondamentale du système.
, sont linéairement indépendants, l’ensemble est un ensemble fondamental de solutions au système et la matrice suivante est la matrice fondamentale du système.
![Y=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a576b4cafb66b8f1a0074ec88604132b.png "Y=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]")
La solution générale est donc

![=c_1[(-2),(3)]e^(3t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c5afe47b33ed8874b02d56a117021304.png "=c_1[(-2),(3)]e^(3t)")
![+c_2[(-2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/89415a04f31518914c703e9f90dbf3ef.png "+c_2[(-2),(-1)]e^(t)")
![=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/17d51d9f9e97c367634208d7f53f2113.png "=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]")
![[(c_1),(c_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9163ee11f687e7de98db610527c319eb.png "[(c_1),(c_2)]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=250
Pour trouver les solutions de systèmes homogènes à coefficients constants, représentés par le système présenté à la section 6.5.1, on applique une approche similaire à celle utilisée pour résoudre des équations différentielles linéaires homogènes à coefficients constants.
À la section 3.2, on a trouvé une solution non triviale de la forme ") pour une équation différentielle linéaire homogène à coefficients constants. La section 6.4 a montré que toute équation différentielle linéaire d’ordre supérieur peut être exprimée comme un système linéaire d’équations différentielles du premier ordre. Par conséquent, il est raisonnable qu’une solution du système indiqué à la section 6.5.1 présente la forme
pour une équation différentielle linéaire homogène à coefficients constants. La section 6.4 a montré que toute équation différentielle linéaire d’ordre supérieur peut être exprimée comme un système linéaire d’équations différentielles du premier ordre. Par conséquent, il est raisonnable qu’une solution du système indiqué à la section 6.5.1 présente la forme
Ici,  est une constante et
est une constante et ") est un vecteur constant. L’étape suivante consiste à remplacer la solution présentée à la section 6.5.2 dans notre système. Ce qui donne
est un vecteur constant. L’étape suivante consiste à remplacer la solution présentée à la section 6.5.2 dans notre système. Ce qui donne

mathbf(u) = Ae^(rt)mathbf(u)")
Après avoir annulé le terme exponentiel ") , on arrive à
, on arrive à
 = Amathbf(u)")
En réarrangeant l’équation, on obtient
mathbf(u) = 0")
C’est l’équation caractéristique utilisée pour trouver les valeurs propres et les vecteurs propres de la matrice , comme expliqué à la section 6.3. Pour que la solution que nous avons trouvée  = e^(rt)mathbf(u)") ne soit pas triviale, et doivent correspondre à la valeur propre et au vecteur propre de la matrice , respectivement.
ne soit pas triviale, et doivent correspondre à la valeur propre et au vecteur propre de la matrice , respectivement.
Ainsi, pour résoudre le système 6.5.1, il faut d’abord trouver les valeurs propres et les vecteurs propres de la matrice coefficient . La structure de la solution varie selon la nature des valeurs propres, qui peuvent être réelles et distinctes, complexes ou répétées. Chacun de ces scénarios sera exploré dans les sections suivantes.
![bb"y"_1=[(-5),(6)]e^(-t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d3f7da196b2cca467e0df2d229fe6c01.png "bb"y"_1=[(-5),(6)]e^(-t)") et
et ![bb"y"_2=[(3),(1)]e^(4t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5819b83ce59ffa93ac4816e340cfc10e.png "bb"y"_2=[(3),(1)]e^(4t)")
sont des solutions à un système différentiel à coefficients constants , calcule le wronskien de . Détermine si les vecteurs sont linéairement indépendants.
=-23 e^(3t)") . Les vecteurs sont linéairement indépendants, car leur wronskien n’est jamais nul pour tout nombre réel .
. Les vecteurs sont linéairement indépendants, car leur wronskien n’est jamais nul pour tout nombre réel .
![bb"y"_1=[(-1),(-1)]e^(4t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0c94f9223a83180a74c18706c1b00479.png "bb"y"_1=[(-1),(-1)]e^(4t)") et
et ![bb"y"_2=[(-7),(-2)]e^(-4t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/92435f434d3d68de4b2ee75793dbd2d7.png "bb"y"_2=[(-7),(-2)]e^(-4t)")
sont des solutions à un système différentiel à coefficients constants , calcule le wronskien de . Détermine si les vecteurs sont linéairement indépendants.
=-5") . Les vecteurs sont linéairement indépendants, car leur wronskien n’est pas nul.
. Les vecteurs sont linéairement indépendants, car leur wronskien n’est pas nul.
33
À la section 6.5, vous avons vu que les solutions de systèmes homogènes à coefficients constants
présentent la forme

où est une valeur propre et  est le vecteur propre correspondant de la matrice coefficient .
est le vecteur propre correspondant de la matrice coefficient .
Dans cette section, nous nous intéressons au cas où les valeurs propres d’une matrice sont distinctes et réelles.
Théorème : si une matrice  a valeurs propres réelles et distinctes
a valeurs propres réelles et distinctes  et si
et si  est un vecteur propre associé à la valeur propre
est un vecteur propre associé à la valeur propre  , alors les vecteurs
, alors les vecteurs  sont linéairement indépendants.
sont linéairement indépendants.
Dans ce contexte, les solutions de chaque valeur propre prennent la forme  . Collectivement, l’ensemble
. Collectivement, l’ensemble  forme un ensemble fondamental de solutions pour le système homogène présenté à la section 6.6.1.
forme un ensemble fondamental de solutions pour le système homogène présenté à la section 6.6.1.
Par conséquent, la solution générale peut être exprimée comme une combinaison linéaire de ces solutions individuelles.
où est une constante arbitraire.
Trouver la solution générale de
![bb"y"'=[(-6,-3),(1,-2)]bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/38c61dc42f329494306f5698e5b7cdcd.png "bb"y"'=[(-6,-3),(1,-2)]bb"y"")
1. Il faut d’abord trouver les valeurs propres de la matrice coefficient .
Le polynôme caractéristique de est donné par
,(1,-2-lambda) |")
(lambda+2)+3")

(lambda+3)")
Les racines de , à savoir  et
et  , sont les valeurs propres de .
, sont les valeurs propres de .
2. Ensuite, pour trouver les vecteurs propres correspondants, il faut trouver la solution à l’équation bb"u"=bb"0"") pour chaque valeur propre.
pour chaque valeur propre.
Pour , on a
bb"u"=bb"0"")
![[(-5+6,3),(-1,-5+2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fd4deaa946c17175501bf60f9a18aed9.png "[(-5+6,3),(-1,-5+2) ]")
![[(1,3),(-1,-3) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d38c9ba6a5327c7e4de0f4489c470f09.png "[(1,3),(-1,-3) ]")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_1=t[(-3),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e4da5d17db48a23bea55c28c22904bc9.png "bb"u"_1=t[(-3),(1)]") pour . En prenant , un vecteur propre basique correspondant à est
pour . En prenant , un vecteur propre basique correspondant à est 
![=[(-3),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/be2f3302a914133956a21f686e379aa2.png "=[(-3),(1)]") .
.
Pour , on a
bb(u)=bb(0)")
![[(-3+6,3),(-1,-3+2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a77db9161968655810f9900bc9fff30a.png "[(-3+6,3),(-1,-3+2) ]")
![[(3,3),(-1,-1) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f3713f46c0713d57dafc682bb73b40ed.png "[(3,3),(-1,-1) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(3,3,|,0),(-1,-1,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/94f8def0ebc64f080d18d0826164df4f.png "[(3,3,|,0),(-1,-1,|,0) ]~")
![[(1,1,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6985ba3fb517bc3844d2d5b03fc12f76.png "[(1,1,|,0),(0,0,|,0) ]")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_2=t[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d7edd41fab71b4c250b10a63da2cf820.png "bb"u"_2=t[(-1),(1)]") pour . En prenant , un vecteur propre basique correspondant à est
pour . En prenant , un vecteur propre basique correspondant à est  .
.
3. Une solution générale du système est donnée par l’équation présentée à la section 6.6.2.
![bb"y"(t)=c_1e^(-5t) [(-3),(1)]+c_2 e^(-3t) [(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2bdc07a3d8b0e6449fd9c9ab4cb433ab.png "bb"y"(t)=c_1e^(-5t) [(-3),(1)]+c_2 e^(-3t) [(-1),(1)]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=253
Résoudre le système d’équations différentielles avec les valeurs initiales données.
,(y_2' = 2 y_1 -7 y_2):},")
 = 7, \quad y_2(0) = 3")
1. On exprime d’abord le système dans la notation matricielle.
![bb"y"'=[(4,-15),(2,-7) ]bb"y",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6888113509412f74f9b600c4920eb89b.png "bb"y"'=[(4,-15),(2,-7) ]bb"y",")
![bb"y"(0)=[(7),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/543ee09260447a166e588c6bc4e775f2.png "bb"y"(0)=[(7),(3)]")
2. Ensuite, on trouve les valeurs propres de .
Le polynôme caractéristique de la matrice coefficient est donné par
,(2,-7-lambda) |")
(-7-lambda)+30")

(lambda+2)")
Les racines de , à savoir  et , sont les valeurs propres de .
et , sont les valeurs propres de .
3. On trouve ensuite les vecteurs propres correspondants.
Pour , on a
![[(4+1,-15),(2,-7+1) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c6e4f7284ad4e9979fb1b0af976cdd55.png "[(4+1,-15),(2,-7+1) ]")
![[(5,-15),(2,-6) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ccbf25f2e3dca99aa6b0eaa43b12706e.png "[(5,-15),(2,-6) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(5,-15,|,0),(2,-6,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bc8d57ed8916e2134a539f0787410123.png "[(5,-15,|,0),(2,-6,|,0) ]~")
![[(1,-3,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8dff248d0a39c59e481fff56e75ed5d7.png "[(1,-3,|,0),(0,0,|,0) ]")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_1=t[(3),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3e5e54dc66c7af503627d7e2fe951835.png "bb"u"_1=t[(3),(1)]") pour . En prenant , un vecteur propre basique correspondant à est
pour . En prenant , un vecteur propre basique correspondant à est ![=[(3),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/45e9e12108afcbd1818417640251c611.png "=[(3),(1)]") .
.
Pour , on a
bb"u"=bb"0"")
![[(4+2,-15),(2,-7+2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c4fed569316fb5d506cce7c8942e7617.png "[(4+2,-15),(2,-7+2) ]")
![[(6,-15),(2,-5) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0cc9eeaf193b444e4f54c5eff1457686.png "[(6,-15),(2,-5) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(6,-15,|,0),(2,-5,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/987b097e57a9c89d1360b0343fa801ca.png "[(6,-15,|,0),(2,-5,|,0) ]~")
![[(1,-5/2,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a81aa9b57eaef4dffb2a967c7a9321e1.png "[(1,-5/2,|,0),(0,0,|,0) ]")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_2=t[(5/2),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5003be2be2b2ca9a733b01d5abc6407b.png "bb"u"_2=t[(5/2),(1)]") pour . En prenant
pour . En prenant  , un vecteur propre basique correspondant à est
, un vecteur propre basique correspondant à est ![=[(5),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0ac20742c10b8d51093885b4058a4542.png "=[(5),(2)]") .
.
4. Une solution générale du système est donnée par l’équation présentée à la section 6.6.2.
![bb"y"(t)=c_1e^(-t) [(3),(1)]+c_2 e^(-2t) [(5),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e5595c165b6d608e0dd5c0d3262f6084.png "bb"y"(t)=c_1e^(-t) [(3),(1)]+c_2 e^(-2t) [(5),(2)]")
5. Enfin, on applique les conditions initiales pour trouver les constantes et .
![c_1e^(0) [(3),(1)]+c_2 e^(0) [(5),(2)]=[(7),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e640c171996d8cbe0a6303e4efc35844.png "c_1e^(0) [(3),(1)]+c_2 e^(0) [(5),(2)]=[(7),(3)]")
![[(3c_1+5c_2),(c_1+2c_2)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d36f9d592255261a1ff35b51afb34e7a.png "[(3c_1+5c_2),(c_1+2c_2)]=")
![[(7),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e11f12523a31660dd0be9e941954d2f7.png "[(7),(3)]")
On obtient ainsi un système de deux équations à deux inconnues.
,(c_1+2c_2=3 ):}")
En résolvant le système, on trouve


La solution du problème de valeur initiale est donc
![bb"y"(t)=-e^(-t) [(3),(1)]+2 e^(-2t) [(5),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3245be839a3e3c9dcfaf82f1c378f6ff.png "bb"y"(t)=-e^(-t) [(3),(1)]+2 e^(-2t) [(5),(2)]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=253
Résoudre le système d’équations différentielles avec les valeurs initiales données.
,(y_2' = 11 y_2 -7 y_3),(y_3' = 14 y_2 -10 y_3) :},")
 = -3, \ y_2(0) = -1, \ y_3(0)=1")
1. On exprime d’abord le système dans la notation matricielle.
![bb"y"'=[(3,14,-13),(0,11,-7),(0,14,-10) ]bb"y",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2bf68d5c7004f34f0ad99eb61d8b79fd.png "bb"y"'=[(3,14,-13),(0,11,-7),(0,14,-10) ]bb"y",")
![bb"y"(0)=[(-3),(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5b0af8aebe1f0b853bec18a265e2845e.png "bb"y"(0)=[(-3),(-1),(1)]")
2. Il faut d’abord trouver les valeurs propres de la matrice coefficient .
Le polynôme caractéristique de est donné par
,(0,11-lambda,-7),(0,14,-10-lambda)|")
|(11-lambda,-7),(14,-10-lambda)|")
(lambda^2-lambda-12)")
(lambda+3)(lambda-4)")
Les racines de , à savoir  ,
,  , et
, et  , sont les valeurs propres de .
, sont les valeurs propres de .
3. On trouve ensuite les vecteurs propres correspondants.
Pour , on a
![=[(0,14,-13),(0,8,-7),(0,14,-13)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cd5fccd0048d80d02286f0ac117c9b26.png "=[(0,14,-13),(0,8,-7),(0,14,-13)]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(0,14,-13,|,0),(0,8,-7,|,0),(0,14,-13,|,0)]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/320c4c73672d92f46818b2d2ada01b6e.png "[(0,14,-13,|,0),(0,8,-7,|,0),(0,14,-13,|,0)]~")
![[(0,1,0,|,0),(0,0,1,|,0),(0,0,0,|,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bbc94483e774662380e69eaf22cea584.png "[(0,1,0,|,0),(0,0,1,|,0),(0,0,0,|,0)]")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_1=t[(1),(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ad39fa631be7613d5c978895aacdd577.png "bb"u"_1=t[(1),(0),(0)]") pour . En prenant , un vecteur propre basique correspondant à est
pour . En prenant , un vecteur propre basique correspondant à est ![=[(1),(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b26f36a02ead78466df895fa6d4eef79.png "=[(1),(0),(0)]") .
.
Pour , on a
![=[(-1,14,-13),(0,7,-7),(0,14,-14)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8d5bd90017cc902da2275ea9b324171e.png "=[(-1,14,-13),(0,7,-7),(0,14,-14)]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(-1,14,-13),(0,7,-7),(0,14,-14)]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a1e532665395cf1da466168b7ea37f1f.png "[(-1,14,-13),(0,7,-7),(0,14,-14)]~")
![[(1,0,-1),(0,1,-1),(0,0,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/04e4fbb13c43b87dfbca2d28f28f5d84.png "[(1,0,-1),(0,1,-1),(0,0,0)]")
Ainsi, les vecteurs propres correspondant à sont ![bb"u"_2=t[(1),(1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4916f6370cff8266fb8130aed43f6bf6.png "bb"u"_2=t[(1),(1),(1)]") pour . En prenant , un vecteur propre basique correspondant à est
pour . En prenant , un vecteur propre basique correspondant à est ![=[(1),(1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/05f4b8b70a797f95189a83dbb0c814a2.png "=[(1),(1),(1)]") .
.
Pour , on a
bb"u"=bb"0"")
![=[(6,14,-13),(0,14,-7),(0,14,-7)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1b39752484d05a7cdfad01315f495eed.png "=[(6,14,-13),(0,14,-7),(0,14,-7)]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(6,14,-13),(0,14,-7),(0,14,-7)]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/03b7bfd39997e75ed74b4cb7dbf4adb5.png "[(6,14,-13),(0,14,-7),(0,14,-7)]~")
![[(1,0,-1),(0,1,-1/2),(0,0,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f08bfdcfdac7d9da129eef558c26808e.png "[(1,0,-1),(0,1,-1/2),(0,0,0)]")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_3=t[(1),(1/2),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dd7de75c48fd70f1a46235d0447cadde.png "bb"u"_3=t[(1),(1/2),(1)]") pour . En prenant , un vecteur propre basique correspondant à est
pour . En prenant , un vecteur propre basique correspondant à est 
![=[(2),(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ee62b54110edb439c009de8236ec464f.png "=[(2),(1),(2)]") .
.
4. Une solution générale du système est donnée par l’équation présentée à la section 6.6.2.
![bb"y"(t)=c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7aaefd66f914840d7a488a6c5b4278bb.png "bb"y"(t)=c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]")
5. Enfin, on applique les conditions initiales pour trouver les constantes , et .
![c_1e^0 [(1),(0),(0)]+c_2 e^0 [(1),(1),(1)]+c_3e^0[(2),(1),(2)] =[(-3),(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3524223183a6cea73c3d5689278eb478.png "c_1e^0 [(1),(0),(0)]+c_2 e^0 [(1),(1),(1)]+c_3e^0[(2),(1),(2)] =[(-3),(-1),(1)]")
On obtient ainsi un système de trois équations à trois inconnues.
,(c_2+c_3=-1 ),(c_2+2c_3=1):}")
En résolvant le système, on trouve



La solution du problème de valeur initiale est donc
![bb"y"(t)=-4e^(3t) [(1),(0),(0)]-3 e^(4t) [(1),(1),(1)]+2e^(-3t)[(2),(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c3802243b270ce109ab6b1aae5299474.png "bb"y"(t)=-4e^(3t) [(1),(0),(0)]-3 e^(4t) [(1),(1),(1)]+2e^(-3t)[(2),(1),(2)]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=253
À la section 6.4, nous avons vu comment les équations différentielles linéaires d’ordre supérieur peuvent être converties en systèmes d’équations linéaires du premier ordre. Cette transformation, associée à la méthode matricielle, offre plusieurs avantages, notamment une meilleure organisation du problème et une facilité de calcul. Bien que cette approche ne soit pas toujours plus courte que la méthode du polynôme caractéristique présentée à la section 3.2, en particulier pour résoudre des équations différentielles homogènes du second ordre à coefficients constants, il est utile de comprendre ce processus. Pour illustrer son application, prenons un exemple.
Convertir l’équation différentielle donnée en un système linéaire du premier ordre et trouver la solution.

 = -3, \quad y'(0) = -13")
a. Convertir l’équation en un système :
1a. Introduire une nouvelle variable :
2a. Exprimer les dérivées en différenciant les équations ci-dessus et réarranger l’équation différentielle originale afin d’isoler :
 » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> 
On exprime aussi les conditions initiales par rapport aux nouvelles variables :
=y(0)=-3")
=y'(0)=-13")
3a. Le système d’équations du premier ordre est donc

=-3, \ x_2(0)=-13")
1b. On exprime le système sous forme matricielle.
![bb"x"'=[(0,1),(10,-3) ]bb"x",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d50b65c563d93bd6b4c601dcab133c0c.png "bb"x"'=[(0,1),(10,-3) ]bb"x",")
![bb"x"(0)=[(-3),(-13)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/50755826da3437fdd59c07ac0b49b87c.png "bb"x"(0)=[(-3),(-13)]")
2b. Il faut d’abord trouver les valeurs propres de la matrice coefficient .
Le polynôme caractéristique de est donné par
,(10,-3-lambda) |")
(-3-lambda)-10")

(lambda+5)")
Les racines de , à savoir  et
et  , sont les valeurs propres de .
, sont les valeurs propres de .
3b. On trouve ensuite les vecteurs propres correspondants.
Pour , on a
![[(-2,1),(10,-5) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5d186004c5d7e64f66aaab55aa11d43c.png "[(-2,1),(10,-5) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(-2,1,|,0),(10,-5,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9c6c52cac731b8f6e98ab0b27ca1e870.png "[(-2,1,|,0),(10,-5,|,0) ]~")
![[(1,-1/2,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9e8213c71e8db6ee33881c84287f43db.png "[(1,-1/2,|,0),(0,0,|,0) ]")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_1=t[(1/2),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a08c79201a92bcd64c1fb54c5e642814.png "bb"u"_1=t[(1/2),(1)]") pour . En prenant , un vecteur propre basique est
pour . En prenant , un vecteur propre basique est ![=[(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6fe213f529670406fdd238c414a350ee.png "=[(1),(2)]") .
.
Pour , on a
![[(5,1),(10,2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4f63244685ddfdd173ed8e5c566b638f.png "[(5,1),(10,2) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(5,1,|,0),(10,2,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/24d68543552efe12c45281b3c8559a99.png "[(5,1,|,0),(10,2,|,0) ]~")
![[(1,1/5,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/87a554c05e58a18cd8d2a5d8e0078bd7.png "[(1,1/5,|,0),(0,0,|,0) ]")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_2=t[(-1/5),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3c4f6a9195bb454cf3318c7ab9f58942.png "bb"u"_2=t[(-1/5),(1)]") pour . En prenant , un vecteur propre basique est
pour . En prenant , un vecteur propre basique est ![=[(-1),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2e9a58ece306bafbb03a88f31cf55f9d.png "=[(-1),(5)]") .
.
4b. Une solution générale du système est donnée par l’équation présentée à la section 6.6.2.
![bb"x"(t)=c_1e^(2t) [(1),(2)]+c_2 e^(-5t) [(-1),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f58eb59ed722908eefca8ff516fccc15.png "bb"x"(t)=c_1e^(2t) [(1),(2)]+c_2 e^(-5t) [(-1),(5)]")
5b. On applique les conditions initiales pour trouver les constantes et .
![c_1e^(0) [(1),(2)]+c_2 e^(0) [(-1),(5)]=[(-3),(-13)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/856d900f952fb254defb3bfb5766508a.png "c_1e^(0) [(1),(2)]+c_2 e^(0) [(-1),(5)]=[(-3),(-13)]")
![[(c_1-c_2),(2c_1+5c_2)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7ac7a80f0c4c60928d5112d74b6baf55.png "[(c_1-c_2),(2c_1+5c_2)]=")
![[(-3),(-13)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/70a5d4386143b4769e9edcaed63485db.png "[(-3),(-13)]")
On obtient ainsi un système de deux équations à deux inconnues.
,(2c_1+5c_2=-13 ):}")
En résolvant le système, on trouve

La solution du problème de valeur initiale est donc
![bb"x"(t)=-4e^(2t) [(1),(2)]- e^(-5t) [(-1),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c52efe82042ca1b2134b55182f727bc2.png "bb"x"(t)=-4e^(2t) [(1),(2)]- e^(-5t) [(-1),(5)]")
c. Déterminer la solution de l’équation originale
Étant donné que ![bb"x"(t)=[(x_1),(x_2)]=[(y),(y')]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f699f8809574fc72b0cb9cf2be9e4322.png "bb"x"(t)=[(x_1),(x_2)]=[(y),(y')]") , on voit que la solution de l’équation différentielle du second ordre d’origine est la ligne supérieure de la solution du système. La solution de l’équation d’origine est donc
, on voit que la solution de l’équation différentielle du second ordre d’origine est la ligne supérieure de la solution du système. La solution de l’équation d’origine est donc
+e^(-5t)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=253
,(y_2' = 2 y_1 -3 y_2):},")
 = 4, \quad y_2(0) = 1")
=6e^(3t)-2e^t")
=2e^(3t)-e^t")
![bb"y"'=[(-17,-30),(4,5)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/16a9cdc00eb185f4eb6edffaad1b2e1f.png "bb"y"'=[(-17,-30),(4,5)] bb"y"")
![bb"y"(t)=c_1e^(-5t)[(-5),(2)]+c_2e^(-7t)[(-3),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c6a6c987b653f4658581558794aad5c5.png "bb"y"(t)=c_1e^(-5t)[(-5),(2)]+c_2e^(-7t)[(-3),(1)]")
![bb"y"'=[(1,-12,7),(0,-10,6),(0,-12,8)] bb"y",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/45b18f7335e0614444ea5525da6d09a3.png "bb"y"'=[(1,-12,7),(0,-10,6),(0,-12,8)] bb"y",")
![mathbfy'(0)=[(3),(4),(7)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cfb92f1fdd46c6ac9b3b7da84d2b00a7.png "mathbfy'(0)=[(3),(4),(7)]")
![bb"y"(t)=-4e^t[(1),(0),(0)]+3e^(2t)[(2),(1),(2)] +e^(-4t)[(1),(1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bfdca9f2ab42722e54281632a9b4726f.png "bb"y"(t)=-4e^t[(1),(0),(0)]+3e^(2t)[(2),(1),(2)] +e^(-4t)[(1),(1),(1)]")
34
Dans cette section, nous examinons les solutions d’un système homogène à coefficients constants dans les situations où les valeurs propres de la matrice coefficient sont complexes. Normalement, ces valeurs propres sont des conjugués les unes des autres, ce qu’on représente par  , où est l’unité imaginaire et
, où est l’unité imaginaire et  et
et  sont des nombres réels. Comme dans le cas complexe d’équations différentielles du second ordre, on utilise la formule d’Euler pour convertir des exponentielles complexes en fonctions trigonométriques réelles, en commençant par la forme de solution supposée
sont des nombres réels. Comme dans le cas complexe d’équations différentielles du second ordre, on utilise la formule d’Euler pour convertir des exponentielles complexes en fonctions trigonométriques réelles, en commençant par la forme de solution supposée bb"u"") .
.
Théorème. Si une matrice a des valeurs propres complexes conjuguées avec le vecteur propre correspondant  , alors deux solutions linéairement indépendantes du système homogène sont
, alors deux solutions linéairement indépendantes du système homogène sont
(bb"a"cos(betat)-bb"b"sin(beta t))")
(bb"a"sin(betat)+bb"b"cos(beta t))")
La solution générale du système est donnée par
=c_1bb"y"_1+c_2 bb"y"_2")
où et sont des constantes arbitraires.
Trouver la solution générale de
![bb"y"'=[(5,6),(-3,-1)]bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c8d891414eefe9460b3e0389ea7bac01.png "bb"y"'=[(5,6),(-3,-1)]bb"y"")
1. Il faut d’abord trouver les valeurs propres de .
Le polynôme caractéristique de la matrice coefficient est donné par
,(-3,-1-lambda) |")
(-1-lambda)+18")

^2+9")
Les racines de , à savoir  , sont donc les valeurs propres de.
, sont donc les valeurs propres de.
2. Ensuite, on trouve les vecteurs propres correspondants en trouvant la solution à l’équation . Cependant, on doit seulement trouver le vecteur propre associé à l’une des valeurs propres, par exemple  .
.
bb"u"=bb"0"")
![[(5-(2+i3),6),(-3,-1-(2+i3)) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/89218795ad4da7974d7c6d68cfa23547.png "[(5-(2+i3),6),(-3,-1-(2+i3)) ]")
![[(3-i3,6),(-3,-3-i3) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e8d7d3e8e20fc06d41a53d3be509a986.png "[(3-i3,6),(-3,-3-i3) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(3-i3,6,|,0),(-3,-3-i3,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0fd22ea12ccd2335a6b0c3bdc35250f5.png "[(3-i3,6,|,0),(-3,-3-i3,|,0) ]~")
![[(1,1+i,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7dfb7f0199097de96b59e447819c9315.png "[(1,1+i,|,0),(0,0,|,0) ]")
Par conséquent, les vecteurs propres correspondant à la valeur propre sont ![bb"u"_1=t[(-1-i),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4a6ab4ccacf815527304b48b224d4810.png "bb"u"_1=t[(-1-i),(1)]") pour . En prenant , on a un vecteur propre basique
pour . En prenant , on a un vecteur propre basique
![bb"u"_1=[(-1-i),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fdf2d97aa65b6dfcc56b377307cfa8de.png "bb"u"_1=[(-1-i),(1)]")
![=[(-1),(1)]+i[(-1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8e615179c467ea665a840025ced8c339.png "=[(-1),(1)]+i[(-1),(0)]")
La partie réelle de est ![bb"a"=[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9803cde2a83877319fa2327dd4a8db0a.png "bb"a"=[(-1),(1)]") et la partie imaginaire de est
et la partie imaginaire de est ![bb"b"=[(-1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7fba2eacacb5fade842dda019d516791.png "bb"b"=[(-1),(0)]") .
.
Le vecteur propre correspondant à la valeur propre conjuguée est le conjugué du vecteur propre . Ainsi, le vecteur propre associé à la valeur propre  est
est
![bb"u"_2=[(-1+i),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cd446a345827152a4156d836e1b66161.png "bb"u"_2=[(-1+i),(1)]")
![=[(-1),(1)]-i[(-1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/eacee602b09cda212c1a9963da9c2339.png "=[(-1),(1)]-i[(-1),(0)]")
3. Une solution générale du système est donc donnée par l’équation présentée à la section 6.7.1.
![bb"y"(t)=c_1e^(2t)([(-1),(1)] cos(3t)-[(-1),(0)] sin(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cff9331521e60ff25cea6c16a500bcb7.png "bb"y"(t)=c_1e^(2t)([(-1),(1)] cos(3t)-[(-1),(0)] sin(3 t))")
![+c_2e^(2t)([(-1),(1)] sin(3t)+[(-1),(0)] cos(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/556a0db004a12acedd4c3657241c38b4.png "+c_2e^(2t)([(-1),(1)] sin(3t)+[(-1),(0)] cos(3 t))")
![=c_1e^(2t)([(-cos(3t)+sin(3t)),(cos(3t))] )](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ff278e8dcdb672271f71b40b9b124656.png "=c_1e^(2t)([(-cos(3t)+sin(3t)),(cos(3t))] )")
![+c_2e^(2t)([(-sin(3t)-cos(3t)),(sin(3t))] )](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6f36a69599e60dc4a30eedeb5a29e2e1.png "+c_2e^(2t)([(-sin(3t)-cos(3t)),(sin(3t))] )")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=256
Résoudre le système d’équations différentielles avec des conditions initiales
![bb"y"' = [[1,3],[-15,-11]] \ bb"y", \quad \ bb"y"(0) = [(-3), (12)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9ea03bc03a2613d22a5a55501fbc4ec7.png "bb"y"' = [[1,3],[-15,-11]] \ bb"y", \quad \ bb"y"(0) = [(-3), (12)]") .
.
1. Il faut d’abord trouver les valeurs propres de .
Le polynôme caractéristique de la matrice coefficient est donné par
,(-15,-11-lambda) |")
(-11-lambda)+45")

^2+9")
Les racines de , à savoir  , sont donc les valeurs propres de .
, sont donc les valeurs propres de .
2. Ensuite, on trouve les vecteurs propres correspondants en trouvant la solution à l’équation bb"u"=bb"0"") . Cependant, on doit seulement trouver le vecteur propre associé à l’une des valeurs propres, par exemple
. Cependant, on doit seulement trouver le vecteur propre associé à l’une des valeurs propres, par exemple  .
.
![[(1-lambda,3),(-15,-11-lambda) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3e7fc4e133d0be8d400f4223559fc429.png "[(1-lambda,3),(-15,-11-lambda) ]")
![[(6+i3,3),(-15,-6+i3) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c33227e247cdeed88c250c547c724086.png "[(6+i3,3),(-15,-6+i3) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(6+i3,3,|,0),(-15,-6+i3,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cdfb259271a0c2e332501ff22b5fdaea.png "[(6+i3,3,|,0),(-15,-6+i3,|,0) ]~")
![[(1,2/5-i1/5,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c9841b8c82600d6e16eebdba0879e728.png "[(1,2/5-i1/5,|,0),(0,0,|,0) ]")
Par conséquent, les vecteurs propres correspondant à la valeur propre sont ![bb"u"_1=t[(-2/5+i1/5),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ea439e45144e49f69653e3bd22681513.png "bb"u"_1=t[(-2/5+i1/5),(1)]") pour . En prenant , on a un vecteur propre basique
pour . En prenant , on a un vecteur propre basique
![bb"u"_1=[(-2+i),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/916cf475ef7c412e0bb7f81c2b4867fc.png "bb"u"_1=[(-2+i),(5)]")
![=[(-2),(5)]+i[(1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/35b6e2905ea2b1196a963c66d65bbfa9.png "=[(-2),(5)]+i[(1),(0)]")
La partie réelle de est ![bb"a"=[(-2),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0465306ac322fb9ce9ff4191a59a7be9.png "bb"a"=[(-2),(5)]") et la partie imaginaire de est
et la partie imaginaire de est ![bb"b"=[(-1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4ad4bddc7597e953d2cada88f1da6144.png "bb"b"=[(-1),(0)]") .
.
Le vecteur propre correspondant à la valeur propre conjuguée est le conjugué du vecteur propre . Ainsi, le vecteur propre associé à la valeur propre  est
est
![bb"u"_1=[(-2+i),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fb55221b2a349387f1d899e6716f04f1.png "bb"u"_1=[(-2+i),(5)]")
![=[(-2),(5)]+i[(1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/46752576acf42e7268d05e16fb266f31.png "=[(-2),(5)]+i[(1),(0)]")
3. Une solution générale du système est donc donnée par l’équation présentée à la section 6.7.1.
![bb"y"(t)=c_1e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/93b6584b1852e5e8f23ac282b159166b.png "bb"y"(t)=c_1e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))")
![+c_2e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2810b0b4bd4591fe1ecdd07623f2c9ee.png "+c_2e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))")
4. On applique les conditions initiales pour trouver les constantes et .
![bb"y"(0)=[(-3),(12)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c9d70edadd023c7406587e78d8486529.png "bb"y"(0)=[(-3),(12)]")
![c_1e^(0)([(-2),(5)] cos(0)-[(1),(0)] sin(0))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/53978b822e69ff07683c48b409131436.png "c_1e^(0)([(-2),(5)] cos(0)-[(1),(0)] sin(0))")
![+c_2e^(0)([(-2),(5)] sin(0)+[(1),(0)] cos(0)) =](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1d10622ee9cb7f731e9549bdc9d359f7.png "+c_2e^(0)([(-2),(5)] sin(0)+[(1),(0)] cos(0)) =")
![[(-3),(12)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f659f82f9f02a1017da1887546b397f3.png "[(-3),(12)]")
![c_1[(-2),(5)]+c_2[(1),(0)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/60d6e74b3ed98e2d751322f15bc831c7.png "c_1[(-2),(5)]+c_2[(1),(0)]=")
On obtient ainsi un système de deux équations à deux inconnues.
,(5c_1=12 ):}")
En résolvant le système, on trouve


La solution du problème de valeur initiale est donc
![bb"y"(t)=12/5e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8039c5e54662cd3b4c58c9a45c384fb2.png "bb"y"(t)=12/5e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))")
![+9/5e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d9a8e8bcb84901ba366609836cb16d5d.png "+9/5e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=256
![bb"y"'=[(-7,-12),(6,5)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c4550369d47040303fbfc9bfeb86f03a.png "bb"y"'=[(-7,-12),(6,5)] bb"y"")
![bb"y"(t)=c_1e^(-t)([(-1),(1)]cos(6t)-[(1),(0)]sin(6t))+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7b49a7f0bd422ab5ed5d7ae3778dfb1f.png "bb"y"(t)=c_1e^(-t)([(-1),(1)]cos(6t)-[(1),(0)]sin(6t))+")
![c_2e^(-t)([(-1),(1)]sin(6t)+[(1),(0)]cos(6t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/17ca6af12c361f1fad1b345093985441.png "c_2e^(-t)([(-1),(1)]sin(6t)+[(1),(0)]cos(6t))")
![bb"y"' = [[4,2],[-29,-10]] \ bb"y", \quad \ bb"y"(0) = [(-2), (19)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8757c9b230ad0f7ea94e8006bf3047f6.png "bb"y"' = [[4,2],[-29,-10]] \ bb"y", \quad \ bb"y"(0) = [(-2), (19)]") .
.
=-2 e^(-3t)cos(3t)+8 e^(-3t)sin(3t)")
=19 e^(-3t)cos(3t)-25 e^(-3t)sin(3t)")
![bb"y"' = [[2,1],[-17,-6]] \ bb"y", \quad \ bb"y"(0) = [(-2), (11)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d7751a6ef3fac4592cb7fc204e2b65e5.png "bb"y"' = [[2,1],[-17,-6]] \ bb"y", \quad \ bb"y"(0) = [(-2), (11)]") .
.
=-2 e^(-2t)cos(t)+3 e^(-2t)sin(t)")
=11 e^(-2t)cos(t)-10 e^(-2t)sin(t)")
35
Dans cette section, nous explorons les solutions d’un système homogène à coefficients constants lorsque les valeurs propres de la matrice coefficient sont répétées. En particulier, nous rencontrons un défi unique lorsque la multiplicité algébrique d’une valeur propre (le nombre de fois où elle apparaît comme racine du polynôme caractéristique) dépasse sa multiplicité géométrique (le nombre de vecteurs propres linéairement indépendants qui lui sont associés). Cette différence nécessite une approche spécifique pour trouver toutes les solutions linéairement indépendantes nécessaires à une solution complète du système. Nous nous concentrons ici sur le cas où une valeur propre a une multiplicité algébrique de 2, mais une multiplicité géométrique de 1 seulement. Dans de telles situations, le concept de vecteurs propres généralisés devient crucial pour développer une solution complète.
Prenons un système homogène formulé comme suit :
où la matrice a une valeur propre qui est répétée deux fois (elle a donc une multiplicité algébrique de 2).
Théorème. Si une matrice a une valeur propre avec une multiplicité de 2, mais seulement un vecteur propre linéairement indépendant qui lui est associé (soit une multiplicité géométrique de 1), le système aura des solutions supplémentaires dérivées de vecteurs propres généralisés.
Pour une valeur propre n’ayant qu’un vecteur propre standard indépendant  , il faut trouver un vecteur propre généralisé
, il faut trouver un vecteur propre généralisé  en résolvant l’équation
en résolvant l’équation
mathbf{v} = mathbf{u}.")
Ce vecteur propre généralisé n’est pas une solution de mathbf{u} = mathbf{0}") , mais satisfait l’équation ci-dessus.
, mais satisfait l’équation ci-dessus.
La solution pour la valeur propre comporte des termes impliquant à la fois des vecteurs propres standard et des vecteurs propres généralisés. Les deux solutions sont linéairement indépendantes.
1.  – associée au vecteur propre standard.
– associée au vecteur propre standard.
2.  – associée au vecteur propre généralisé.
– associée au vecteur propre généralisé.
La solution générale du système présenté à la section 6.8.1 combine ces solutions.
où et sont des constantes arbitraires.
Résoudre le système d’équations différentielles avec les valeurs initiales données.
![bb"y'"=[(3,-1),(1,5)]bb"y",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f09e42a2d3a103bd216148ef05508abb.png "bb"y'"=[(3,-1),(1,5)]bb"y",")
![bb"y"(0)=[(-3),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9d5af3b8317b5f0061190a7f371f27de.png "bb"y"(0)=[(-3),(2)]")
1. Il faut d’abord trouver les valeurs propres de la matrice coefficient .
Le polynôme caractéristique de est donné par
,(1,5-lambda) |")
(5-lambda)+1")

^2")
Le polynôme caractéristique a une racine répétée. Ainsi, =4") est la valeur propre de avec une multiplicité de 2.
est la valeur propre de avec une multiplicité de 2.
2. Pour trouver les vecteurs propres standard correspondants, il faut trouver la solution de l’équation .
Pour , on a
 I)bb"u"=bb"0"")
![=[(3-4,-1),(1,5-4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8247dc55ff8850e55bda3a67e5ea11ea.png "=[(3-4,-1),(1,5-4)]")
![[(-1,-1),(1,1) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/87179f1e6e577c1c537729a392bd66ff.png "[(-1,-1),(1,1) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(-1,-1,|,0),(1,1,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/89d3ec9c9b89ec2e21302fd39b0a0b9e.png "[(-1,-1,|,0),(1,1,|,0) ]~")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_1=t[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d3661f8ecd48fcb24ab4b5346714be3a.png "bb"u"_1=t[(-1),(1)]") . En prenant , un vecteur propre basique correspondant à est .
. En prenant , un vecteur propre basique correspondant à est .
3. Il faut trouver un vecteur propre généralisé  de façon à ce que
de façon à ce que
 I)bb{v} =bb{u}_1")
![[(v_1),(v_2)]=[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5f843c22f13f1af47bff952d5ac2b2c0.png "[(v_1),(v_2)]=[(-1),(1)]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(-1,-1,|,-1),(1,1,|,1) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/21dca64a8e691e45f5a7a84c1d7c3f0b.png "[(-1,-1,|,-1),(1,1,|,1) ]~")
![[(1,1,|,1),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/190cf7fd84459a7212910f3b312d60e8.png "[(1,1,|,1),(0,0,|,0) ]")
La solution est ![bb"v"=[(1-t),(t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b9e16a3a08323bb0f1364d1c95497aa8.png "bb"v"=[(1-t),(t)]") . En prenant , un vecteur propre généralisé est
. En prenant , un vecteur propre généralisé est 
![=[(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e766bfe89a28418ce539b45052b13de4.png "=[(0),(1)]") .
.
4. Une solution générale du système est donnée par l’équation présentée à la section 6.8.2.
![bb{y}(t)=c_1e^{4 t}[(-1),(1)]+ c_2e^(4t)(t[(-1),(1)] +[(0),(1)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/68d40aed5e09053099032023e6a3d1dc.png "bb{y}(t)=c_1e^{4 t}[(-1),(1)]+ c_2e^(4t)(t[(-1),(1)] +[(0),(1)])")
5. On applique les conditions initiales pour trouver les constantes et .
![c_1[(-1),(1)]+ c_2[(0),(1)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1325071af8dffbd96307a8679c40226b.png "c_1[(-1),(1)]+ c_2[(0),(1)]=")
![[(-3),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c4b2f4a86177bce6838c8835fd57713b.png "[(-3),(2)]")
On obtient ainsi un système de deux équations à deux inconnues.
,(c_1+c_2=2 ):}")
En résolvant le système, on obtient

La solution du problème de valeur initiale est donc
![bb{y}(t)=3e^{4 t}[(-1),(1)]-e^(4t)(t[(-1),(1)] +[(0),(1)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ea1708112a443d7544f7d5434fd54e07.png "bb{y}(t)=3e^{4 t}[(-1),(1)]-e^(4t)(t[(-1),(1)] +[(0),(1)])")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=259
Résoudre le système d’équations différentielles avec les valeurs initiales données.
,(y_2' = 3 y_2 ),(y_3' = 5y_1- y_2 -2y_3) :},")
 = -2, \ y_2(0) = 5, \ y_3(0)=-5")
1. On exprime d’abord le PVI dans la notation matricielle.
,")
![bb(y)(0)=[(-2),(5),(-5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e44bcc9e356b507053b731e0eea55f2c.png "bb(y)(0)=[(-2),(5),(-5)]")
où ![A=[(3,1,0),(0,3,0),(5,-1,-2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b2bf9747e24ba18aaa67d971dd42f7e6.png "A=[(3,1,0),(0,3,0),(5,-1,-2) ]") .
.
2. On trouve les valeurs propres de la matrice coefficient .
Le polynôme caractéristique de est donné par
,(0,3-lambda,0),(5,-1,-2-lambda) |")
|(3-lambda,1),(0,3-lambda)|")
(3-lambda)^2")
Les valeurs propres sont  avec une multiplicité de 1 et
avec une multiplicité de 1 et =3") avec une multiplicité de 2.
avec une multiplicité de 2.
3. Pour trouver les vecteurs propres standard correspondants, on résout .
Pour , on a
 I)bb"u"=bb"0"")
![=[(5,1,0),(0,5,0),(5,-1,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7bbbeeb054bbab5dbb39381c9f63b20e.png "=[(5,1,0),(0,5,0),(5,-1,0) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(5,1,0),(0,5,0),(5,-1,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d5d68d6c265aa2eb713dec18f16b5502.png "[(5,1,0),(0,5,0),(5,-1,0) ]~")
![[(1,0,0),(0,1,0),(0,0,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/237f7e45de8bc0cc9c3b35a266fe5869.png "[(1,0,0),(0,1,0),(0,0,0) ]")
Par conséquent, les vecteurs propres correspondant à =-2") sont
sont ![bb"u"_1=t[(0),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/aee77b941e55c29fd2d589cef79e986c.png "bb"u"_1=t[(0),(0),(1)]") . En prenant , un vecteur propre basique correspondant à est
. En prenant , un vecteur propre basique correspondant à est ![=[(0),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c0aa76e22e9821ce06e970227de29f81.png "=[(0),(0),(1)]") .
.
Pour , on a
 I)bb"u"=bb"0"")
![=[(0,1,0),(0,0,0),(5,-1,-5) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/516716725cce4cd72d787b0505947b3f.png "=[(0,1,0),(0,0,0),(5,-1,-5) ]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(0,1,0,|,0),(0,0,0,|,0) ,(5,-1,-5,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3f8f5215753906cc817569ef43ee250a.png "[(0,1,0,|,0),(0,0,0,|,0) ,(5,-1,-5,|,0) ]~")
![[(1,0,-1,|,0),(0,1,0,|,0) ,(0,0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/95f4ff07490d82fe6bd8b389cb5c4594.png "[(1,0,-1,|,0),(0,1,0,|,0) ,(0,0,0,|,0) ]")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_2=t[(1),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b8f0a7a1c3edc5d1a59859d658d533ab.png "bb"u"_2=t[(1),(0),(1)]") . En prenant , un vecteur propre basique correspondant à est
. En prenant , un vecteur propre basique correspondant à est ![=[(1),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a3b03aef73c51b9466daa1293f7663b7.png "=[(1),(0),(1)]") .
.
Pour =3,") la multiplicité géométrique est de 1, et donc inférieure à la multiplicité algébrique (qui est de 2). Cela signifie que la dimension de l’espace propre associé à
la multiplicité géométrique est de 1, et donc inférieure à la multiplicité algébrique (qui est de 2). Cela signifie que la dimension de l’espace propre associé à ") est égale à 1 (tous les vecteurs propres sont traversés par le seul vecteur
est égale à 1 (tous les vecteurs propres sont traversés par le seul vecteur _2") ).
).
4. On doit donc trouver un vecteur généralisé de façon à ce que
 I)bb{v} =bb{u}_2")
![[(0,1,0),(0,0,0),(5,-1,-5) ] [(v_1),(v_2),(v_3)]=[(1),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d2a786e23776770c5213297bea277cd7.png "[(0,1,0),(0,0,0),(5,-1,-5) ] [(v_1),(v_2),(v_3)]=[(1),(0),(1)]")
Pour résoudre le système, on forme la matrice augmentée et on la transforme en FERL au moyen d’opérations de ligne.
![[(0,1,0,|,1),(0,0,0,|,0),(5,-1,-5,|,1) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/82aef669b24d903020d3a3f74d69f3dd.png "[(0,1,0,|,1),(0,0,0,|,0),(5,-1,-5,|,1) ]~")
![[(1,0,-1,|,2/5),(0,1,0,|,1),(0,0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4412f7433061a526ab52aa72eef62889.png "[(1,0,-1,|,2/5),(0,1,0,|,1),(0,0,0,|,0) ]")
La solution est ![bb"v"=[(2/5+t),(1),(t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/72b882fc1ec0da9b5810e674fafb5c36.png "bb"v"=[(2/5+t),(1),(t)]") . En prenant
. En prenant  , un vecteur propre généralisé est
, un vecteur propre généralisé est ![=[(2/5),(1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b955c6765a6cd398e1306e85f9c2a25a.png "=[(2/5),(1),(0)]") .
.
5. Trois solutions linéairement indépendantes du système sont
– Pour et le vecteur propre standard _1") :
:
![bb(y)_1=e^(-2t)[(0),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4abaaacd8656066b267f67dcce668e05.png "bb(y)_1=e^(-2t)[(0),(0),(1)]")
– Pour et le vecteur propre standard :
![bb(y)_2=e^(3t)[(1),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f05261947112b1988ffee68fc9b14a28.png "bb(y)_2=e^(3t)[(1),(0),(1)]")
– Pour et un vecteur propre généralisé :
![bb(y)_3=e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b4af683251a3c94142fbd79c1e4d0194.png "bb(y)_3=e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])")
6. Par conséquent, une solution générale au système est donnée par la combinaison linéaire des solutions ci-dessus :
![bb(y)(t)=c_1e^(-2t)[(0),(0),(1)] +](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/945cfdb1295dc89d21dd750dc302d48d.png "bb(y)(t)=c_1e^(-2t)[(0),(0),(1)] +")
![c_2e^(3t)[(1),(0),(1)]+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3dde38e3cd25ff1c339753ac96f1292a.png "c_2e^(3t)[(1),(0),(1)]+")
![c_3e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ae0cedbb8fa81a7f83b76188cbf67f59.png "c_3e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])")
7. On applique maintenant les conditions initiales pour trouver les constantes.
![c_1[(0),(0),(1)] +](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/97261189dea181f651175d2abde86124.png "c_1[(0),(0),(1)] +")
![c_2[(1),(0),(1)]+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/01509b95d86b8d2e953af0186fb84c63.png "c_2[(1),(0),(1)]+")
![c_3[(2//5),(1),(0)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dcd4240587a81d6ea50857ae7cdb5f85.png "c_3[(2//5),(1),(0)]=")
![[(-2),(5),(-5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dd3b2a8606ef2ec33b2507dcef810536.png "[(-2),(5),(-5)]")
On obtient ainsi un système de trois équations à trois inconnues.
,(c_3=5 ),(c_1+c_2=-5) :}")
En résolvant le système, on obtient


La solution du problème de valeur initiale est donc
![bb(y)(t)=-e^(-2t)[(0),(0),(1)]-](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0146d79f7b2f17ef6685ac93601d5448.png "bb(y)(t)=-e^(-2t)[(0),(0),(1)]-")
![4e^(3t)[(1),(0),(1)]+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ff276acedeadcd0ad5c2b6a7ad6f58ea.png "4e^(3t)[(1),(0),(1)]+")
![5e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/36c05bc8a689b208a7c7d1a6de74e1ca.png "5e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=259
![bb"y"'=[(-3,1),(-1,-5)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/360bacacdad5eaaaa9b98c9417d59726.png "bb"y"'=[(-3,1),(-1,-5)] bb"y"") ,
, ![bb"y"(t)=[(9 ),(-13)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8cf9c79b981e6b3872e75309bfd5e8b1.png "bb"y"(t)=[(9 ),(-13)]")
=13 e^(-4t)-4(1+t)e^(-4t)")
=-13 e^(-4t)+4te^(-4t)")
![bb"y"'=[(-6,2),(-2,-10)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3c1467fceeec68123bfc6d912d3c15f5.png "bb"y"'=[(-6,2),(-2,-10)] bb"y"") ,
, ![bb"y"(t)=[(-14 ),(-26)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/519c2409f0f19e702bba37f725d57eb6.png "bb"y"(t)=[(-14 ),(-26)]")
= 26 e^(-8t)-40(1+2t)e^(-8t)")
= -26 e^(-8t)+80te^(-8t)")
![bb"y"'=[(2,1,0),(0,2,0),(4,-3,-1)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d0b47dfe5b4798c677412f7812b71f09.png "bb"y"'=[(2,1,0),(0,2,0),(4,-3,-1)] bb"y"") ,
, ![bb"y"(t)=[(-9 ),(-18),(27)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1bc5a1103f368802b5b2676de35e5bf8.png "bb"y"(t)=[(-9 ),(-18),(27)]")
![bb(y)(t)=13e^(-t)[(0),(0),(1)]+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/91ec65e901de3762c0299edb6c1fc0bf.png "bb(y)(t)=13e^(-t)[(0),(0),(1)]+")
![7/2e^(2t)[(3),(0),(4)]-](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/af0552ff754212501433197e93f4036e.png "7/2e^(2t)[(3),(0),(4)]-")
![6e^(2t)(t[(3),(0),(4)]+[(13//4),(3),(0)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0fcc5a578caef9b710c7224fd8d6ebcc.png "6e^(2t)(t[(3),(0),(4)]+[(13//4),(3),(0)])")
36
Dans cette section, nous traitons du système linéaire non homogène
où la matrice  est une fonction matricielle
est une fonction matricielle  et
et ") est une fonction de forçage à n vecteurs. Le système homogène associé
est une fonction de forçage à n vecteurs. Le système homogène associé '=Abb(y)") est appelé système complémentaire.
est appelé système complémentaire.
Les méthodes abordées au chapitre 3, à savoir les coefficients indéterminés et la variation des paramètres, utilisées pour trouver des solutions particulières à des équations linéaires non homogènes peuvent être appliquées à des systèmes linéaires non homogènes. Nous nous intéressons ici à la méthode de variation des paramètres.
La méthode de variation des paramètres expliquée à la section 3.5 pour des équations linéaires, s’applique également à des systèmes linéaires. Elle exige un ensemble fondamental de solutions à l’équation complémentaire (homogène).
Théorème. Supposons qu’une matrice et un vecteur n  sont continus sur un intervalle ouvert
sont continus sur un intervalle ouvert  . Disons que
. Disons que _p") est une solution particulière du système 6.9.1 sur et que
est une solution particulière du système 6.9.1 sur et que _1, bb(y)_2, ..., bb(y)_n}") est un ensemble fondamental de solutions du système complémentaire
est un ensemble fondamental de solutions du système complémentaire '=A(t)bb(y)") . Alors, la solution générale de l’équation de la section 6.9.1 sur est
. Alors, la solution générale de l’équation de la section 6.9.1 sur est
(t)=bb(y)_p+bb(y)_c")
où où _c=c_1bb(y)_1+c_2bb(y)_2+...+c_nbb(y)_n") est la solution complémentaire et
est la solution complémentaire et  est une constante arbitraire. La solution générale peut donc être exprimée sous la forme
est une constante arbitraire. La solution générale peut donc être exprimée sous la forme
(t)=bb(y)_p+c_1bb(y)_1+c_2bb(y)_2+...+c_nbb(y)_n")
Trouver une solution particulière à '=Abb(y)+bb(f)(t)")
1. Trouver un ensemble fondamental de solutions au système complémentaire correspondant .
2. Former la matrice fondamentale ") pour le système complémentaire.
pour le système complémentaire.
![Y(t)= [bb(y)_1 \ bb(y)_2 \ ... \ bb(y)_n]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/000d5aec63659080180dd2ddd4ff486d-1.png "Y(t)= [bb(y)_1 \ bb(y)_2 \ ... \ bb(y)_n]")
3. Trouver l’inverse de la matrice fondamentale, ") .
.
4. Déterminer (t)=int\ Y^-1(t)bb(f)(t) dt")
5. Une solution particulière du système est donnée par
_p(t)=Y(t)*bb(v)(t)")
_p(t)=Y(t)int \ Y^-1(t)bb(f)(t) dt")
6. Une solution générale du système est donnée par
Trouver la solution générale du système
![bb"y"'=[(-4,-3),(6,5)]bb"y"+[(2),(-2e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c6e69d08fd1d3d681398b2a788d4fc05.png "bb"y"'=[(-4,-3),(6,5)]bb"y"+[(2),(-2e^t)]")
1. Il faut d’abord trouver une solution fondamentale au système complémentaire associé (homogène).
Le polynôme caractéristique de la matrice coefficient est donné par
 =|(lambda+4,3),(-6,lambda-5) |")
(lambda-5)+18")

(lambda+1)")
Les racines de ") , à savoir
, à savoir  et
et  , sont les valeurs propres de . On trouve ensuite les vecteurs propres correspondants.
, sont les valeurs propres de . On trouve ensuite les vecteurs propres correspondants.
Pour , on a
bb"u"=bb"0"")
![[(6,3),(-6,-3) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/468513c5eb5053861dd8d69a535c0c72.png "[(6,3),(-6,-3) ]")
![[(u_1),(u_2)]=[(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e9b1c0442c96e0d85aaf52b869bdcbfa-1.png "[(u_1),(u_2)]=[(0),(0)]")
Par conséquent, les vecteurs propres correspondant à sont ![bb"u"_1=t[(-1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cc143b78eb613fd3944af0d7531b3292.png "bb"u"_1=t[(-1),(2)]") pour
pour  .
.
Pour , on a
bb"u"=bb"0"")
![[(3,3),(-6,-6) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/78d2ec3a99ffae4eb51705b0afe0ae7f.png "[(3,3),(-6,-6) ]")
Les vecteurs propres correspondant à sont ![bb"u"_2=t[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d7edd41fab71b4c250b10a63da2cf820-1.png "bb"u"_2=t[(-1),(1)]") pour .
pour .
Par conséquent, ![{e^(2t) [(-1),(2)], \ e^(-t) [(-1),(1)] }](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b781a469ccaca3ae4c143b54f811e96f.png "{e^(2t) [(-1),(2)], \ e^(-t) [(-1),(1)] }") est un ensemble fondamental de solutions au système complémentaire.
est un ensemble fondamental de solutions au système complémentaire.
2. Ainsi, la matrice fondamentale pour le système complémentaire est
![Y(t)=[(-e^(2t),-e^-t),(2e^(2t),e^-t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/db7d9dd48e019c4e4fe46cc24f604e40.png "Y(t)=[(-e^(2t),-e^-t),(2e^(2t),e^-t)]")
3. On détermine
![Y^-1(t)=1/(-e^(2t)e^-t+2e^(2t)e^-t)[(e^(-t),e^-t),(-2e^(2t),-e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/97b5115722fdb5aa28a9f7c54ae636d0.png "Y^-1(t)=1/(-e^(2t)e^-t+2e^(2t)e^-t)[(e^(-t),e^-t),(-2e^(2t),-e^(2t))]")
![=[(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b3dd76be9c70f4eb1b4d795721b4982f.png "=[(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))]")
4. On détermine ") en définissant une constante d’intégration nulle
en définissant une constante d’intégration nulle
=int\ Y^-1(t)bb"f"(t) dt")
![=int \ [(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))][(2),(-2e^t)] dt](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/db5570c631ae5d84972b4a025f4cb9f2.png "=int \ [(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))][(2),(-2e^t)] dt")
![=int \ [(2e^(-2t)-2e^-t),(-4e^t+2e^(2t))] dt](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/10e77983c78d601ace074776d5cd0ec4.png "=int \ [(2e^(-2t)-2e^-t),(-4e^t+2e^(2t))] dt")
![=[(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7b7c8a66d8666f1770fcb768fa071679.png "=[(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]")
5. Une solution particulière du système est donc donnée par
=Y(t).bb"v"(t)")
![=[(-e^(2t),-e^-t),(2e^(2t),e^-t)][(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2c9343797188975a44b493cd34dbfd93.png "=[(-e^(2t),-e^-t),(2e^(2t),e^-t)][(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]")
![=[(5-3e^t),(-6+5e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2736aea97ed6001185d60c30ede23371.png "=[(5-3e^t),(-6+5e^t)]")
6. Une solution générale du système est donc donnée par

![+c_1e^(2t) [(-1),(2)] +c_2e^(-t) [(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d786006b25748f15420fa8bb3ec73895.png "+c_1e^(2t) [(-1),(2)] +c_2e^(-t) [(-1),(1)]")
Ce qui peut s’écrire
![bb"y"=[(5-3e^t),(-6+5e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/74a23b6bb6924cd15c520aeeebda447b.png "bb"y"=[(5-3e^t),(-6+5e^t)]")
![+[(-e^(2t),-e^-t),(2e^(2t),e^-t)] [(c_1),(c_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3f6e27414ef4c1628576d54d93edeced.png "+[(-e^(2t),-e^-t),(2e^(2t),e^-t)] [(c_1),(c_2)]")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=262
Trouver la solution générale du système
![bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)+[(2e^t),(0),(-e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ce9eb99af0c095407c0add2d74fde843.png "bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)+[(2e^t),(0),(-e^(2t))]")
Le système complémentaire est
![bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5959eac6d6adf680cd1e706a9440ae78.png "bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)")
Le vecteur de forçage est
![bb(f)(t)=[(2e^t),(0),(-e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/61d942657bd581b8e39c47f8da146f1a.png "bb(f)(t)=[(2e^t),(0),(-e^(2t))]")
1. Dans l’exemple 6.6.3 de la section 6.6, on a trouvé un ensemble fondamental de solutions du système complémentaire associé au système donné dans cet exemple.
![{e^(3t) [(1),(0),(0)], \ e^(4t) [(1),(1),(1)] ,\ e^(-3t)[(2),(1),(2)] }](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0deb39c7e0345f354db2c992df8d262c.png "{e^(3t) [(1),(0),(0)], \ e^(4t) [(1),(1),(1)] ,\ e^(-3t)[(2),(1),(2)] }")
2. La matrice fondamentale pour le système complémentaire est
![Y"(t)=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/955c95dc2fcb264e99df1b45dc0ea4b5.png "Y"(t)=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]")
3. On détermine au moyen de la méthode de réduction en lignes, ce qui suppose d’augmenter la matrice avec la matrice identité.
![[Y|I]~[I|Y^-1]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/07daec0952ea2ca5425a61567d9b5830.png "[Y|I]~[I|Y^-1]")
![Y^-1=[(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/29a939aac4e1fd310744133c97ad4bd6.png "Y^-1=[(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ]")
4. On détermine (t)") en définissant une constante d’intégration nulle.
en définissant une constante d’intégration nulle.
![=int \ [(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ] [(2e^t),(0),(-e^(2t))] dt](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c3c28e8a239f5fe70298875f7903eb32.png "=int \ [(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ] [(2e^t),(0),(-e^(2t))] dt")
![=int \ [(2e^(-2t)+e^(-t)),(e^(-2t)),(-e^(5t))] dt](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d1b9e63f7ac25f00fbc016c4d6fc4e62.png "=int \ [(2e^(-2t)+e^(-t)),(e^(-2t)),(-e^(5t))] dt")
![=[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d07c3c2515bc74ad35b40da6446c2788.png "=[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]")
5. Une solution particulière du système est donc donnée par
![=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/90f921651a5594c31914188221cf488c.png "=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]")
![[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/48ed3e18cd8f3462cba330d7cd2c81a9.png "[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]")
![=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a08f2a0ee4bd9960514405bb1a1ba5c7.png "=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]")
6. Une solution générale du système est donc donnée par
![bb(y)(t)=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))] +](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/83549c2ca081dec05d20914cdc9e07ac.png "bb(y)(t)=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))] +")
![c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b18254164f9167ab7f262cfd018899e7.png "c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]")
Ce qui peut également être exprimé par
![bb"y"=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3447c0b1d3cb865a6d89e5f7091ccb5f.png "bb"y"=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]")
![+[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ] [(c_1),(c_2),(c_3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ef0f85e6f5d5adb2c08e46d5839defc6.png "+[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ] [(c_1),(c_2),(c_3)]")
![bb"y'"=[(-25,36),(-18,26)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0cfb5490807641faadba4c7654f75a2c.png "bb"y'"=[(-25,36),(-18,26)] bb"y"")
![+[(-2),(5 e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/404052f200ef1e4c2eaa9517879d2543.png "+[(-2),(5 e^t)]")
![bb(y)(t)=[(-26-90 e^t),(-18-65 e^t)]+[(3e^-t,4e^(2t)),(2e^-t,3e^(2t))][(c_1),(c_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/323ebc77fb623c37f9b254e815489d52.png "bb(y)(t)=[(-26-90 e^t),(-18-65 e^t)]+[(3e^-t,4e^(2t)),(2e^-t,3e^(2t))][(c_1),(c_2)]")
![bb"y'"=[(5,3),(-6,-4)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e9b37c4ca61fe7d497ec38e25222cef4.png "bb"y'"=[(5,3),(-6,-4)] bb"y"")
![+[(2),(5 e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b713ac20cead32f01c8687235006df36.png "+[(2),(5 e^t)]")
![bb(y)(t)=[(-4-7.5 e^t),(6+10 e^t)]+[(-e^-t,-e^(2t)),(2e^-t,e^(2t))][(c_1),(c_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a7b1e8b088beea791cfe876b2218cbd6.png "bb(y)(t)=[(-4-7.5 e^t),(6+10 e^t)]+[(-e^-t,-e^(2t)),(2e^-t,e^(2t))][(c_1),(c_2)]")
37
Dans cette section, nous revenons sur l’application des équations différentielles dans la modélisation des systèmes d’ingénierie. En particulier, nous nous intéressons aux vibrations mécaniques et aux circuits électriques, deux grands domaines donnant lieu à l’application de systèmes d’équations différentielles.
Les équations différentielles sont d’une grande utilité dans divers domaines d’ingénierie. En génie chimique, elles sont essentielles pour modéliser la cinétique des réactions et la dynamique des processus, notamment dans des scénarios tels que les problèmes de mélanges impliquant plusieurs réservoirs et substances, des facteurs déterminants pour la conception des réacteurs et l’optimisation des processus. En génie civil, les modèles d’équations différentielles sont indispensables pour évaluer la sécurité et la longévité des structures soumises à diverses conditions de charge, comme dans l’analyse de la résistance sismique des bâtiments à plusieurs étages. L’ingénierie aérospatiale se sert de ces équations pour simuler le mouvement des avions et des engins spatiaux, en y intégrant à la fois la dynamique de translation et la dynamique de rotation. Ces connaissances sont primordiales pour élaborer des systèmes de contrôle qui améliorent la stabilité et la manœuvrabilité. L’ingénierie environnementale utilise également des modèles d’équations différentielles pour suivre la propagation des polluants, ce qui permet de concevoir des mesures efficaces de protection de l’environnement.
Les lois de Kirchhoff, que nous avons vues à la section 2.5, servent de base à la dérivation des équations directrices. Ces lois facilitent l’analyse des circuits en fournissant une approche systématique du calcul des courants et des tensions en divers points du circuit. Dans les circuits plus complexes, par exemple les circuits série-parallèle,
a) Pour le schéma de circuit électrique donné, déterminer le système d’équations différentielles qui décrit les courants dans les différentes branches du circuit. On suppose que tous les courants initiaux sont nuls. b) Une fois que le système d’équations différentielles et les conditions initiales sont établis, résoudre le système pour les courants dans chaque branche du circuit.
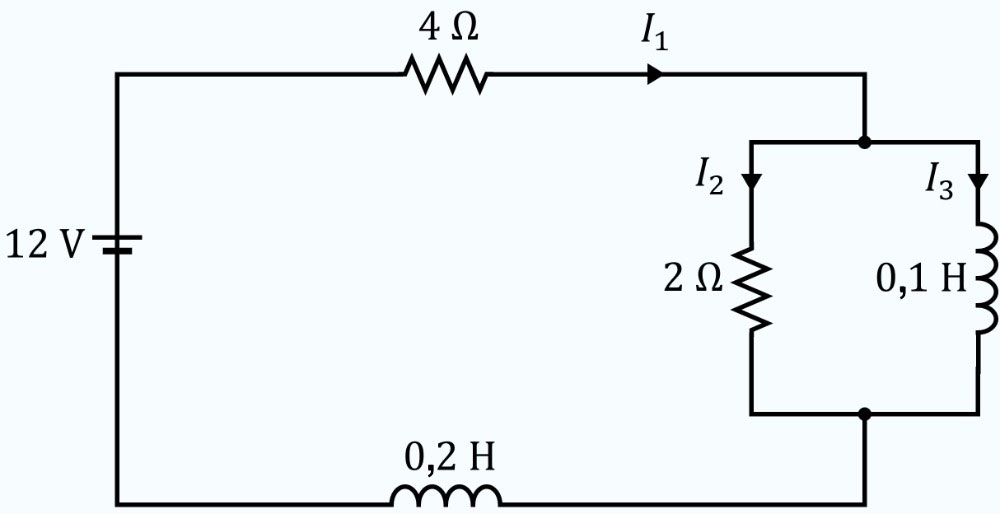
a) Dans l’exemple 4.8.2, nous avons examiné ce circuit RL et l’avons analysé avec la transformée de Laplace. Dans cet exemple, nous résolvons le même circuit avec la méthode matricielle. Les équations du système pour le circuit sont les suivantes, avec pour conditions initiales la nullité de tous les courants à l’instant  .
.
,(0.1I'_3-2I_2=0), (I_1-I_2-I_3=0) :}")

=I_2(0)=I_3(0)=0") (6.10.1)
(6.10.1)
b) Étapes de résolution du système :
1. Le système de la section 6.10.1 est un mélange d’équations différentielles et d’équations algébriques. Il faut d’abord convertir ce système en un système d’équations différentielles linéaires en utilisant la deuxième équation pour exprimer  en tant que
en tant que  dans la première équation et en isolant les premières dérivées dans les deux premières équations. Ce qui donne :
dans la première équation et en isolant les premières dérivées dans les deux premières équations. Ce qui donne :
,(I'_3=20I_2), (I_1-I_2-I_3=0) :}") (6.10.1)
(6.10.1)
Pour créer un système d’équations différentielles linéaires à partir du système donné, il faut tenir compte du fait que  n’a pas de dérivée présente. Pour contourner ce problème, il faut éliminer des équations. Pour ce faire, on réarrange la troisième équation de façon à exprimer en termes de
n’a pas de dérivée présente. Pour contourner ce problème, il faut éliminer des équations. Pour ce faire, on réarrange la troisième équation de façon à exprimer en termes de et
et  , puis on remplace cette expression par dans les autres équations.
, puis on remplace cette expression par dans les autres équations.
 (6.10.2)
(6.10.2)
On simplifie ensuite le système en
,(I'_3=20I_1-20I_3) :}")
=I_3(0)=0") (6.10.2)
(6.10.2)
2. On exprime ensuite le problème de valeur initiale (PVI) sous forme matricielle.
![bb(I)'=[(-30,10),(20,-20)] bb(I)+[(60),(0)],](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/17de568f58e36fe6148b568656fcb261.png "bb(I)'=[(-30,10),(20,-20)] bb(I)+[(60),(0)],")
![bb(I)(0)=[(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/59e432c048d6932b439764b0dec96f8c.png "bb(I)(0)=[(0),(0)]")
3. Ensuite, on trouve une solution fondamentale au système complémentaire associé (homogène). Le polynôme caractéristique de est donné par
=det(A-lambda I)")
,(20,-20-lambda) |")
(-20-lambda)-200")

(lambda+40)")
Les valeurs propres et les vecteurs propres correspondants sont
 :
: ![bb(u)_1=[(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1c1d03aad5acdc2859530199692c81be.png "bb(u)_1=[(1),(2)]")
 :
: ![bb(u)_1=[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/df09fdb5df817afd8006545d216b2cce.png "bb(u)_1=[(-1),(1)]")
Par conséquent, ![{e^(-10t) [(1),(2)], \ e^(-40t) [(-1),(1)] }](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/064b7aa8876b583ac3942c72b5e26e3f.png "{e^(-10t) [(1),(2)], \ e^(-40t) [(-1),(1)] }") est un ensemble fondamental de solutions au système complémentaire.
est un ensemble fondamental de solutions au système complémentaire.
Ainsi, la matrice fondamentale ") pour le système complémentaire est
pour le système complémentaire est
![I_c(t)=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0427d8ed908c32cca6bd9dfa5363862a.png "I_c(t)=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))]")
3. Il faut maintenant déterminer une solution particulière du système.
(i) Déterminer ")
![I_c^-1(t)=1/3[(e^(10t),e^(10t)),(-2e^(40t),e^(40t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/78e7a6299914cf8605798c2493fd60f7.png "I_c^-1(t)=1/3[(e^(10t),e^(10t)),(-2e^(40t),e^(40t))]")
(ii) Détermineren définissant une constante d’intégration nulle
=int\ I_c^-1(t)bb"f"(t) dt")
![=int \ [(e^(10t),e^(10t)),(-2e^(40t),e^(40t))] [(60),(0)] dt](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2ba0b8522b557eea386d23f50cd002f1.png "=int \ [(e^(10t),e^(10t)),(-2e^(40t),e^(40t))] [(60),(0)] dt")
![=[(2e^(10t)),(-e^(40t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5b9da92cf9760cc7e9a48e3e28d22a0a.png "=[(2e^(10t)),(-e^(40t))]")
Une solution particulière du système est donc donnée par
=I_c(t).bb"v"(t)")
![=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))] [(2e^(10t)),(-e^(40t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e513cdec178b8f80b0fbaa04017c482c.png "=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))] [(2e^(10t)),(-e^(40t))]")
![=[(3),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7cfe4ad1afdfb45ab51d5dd5af07b84f.png "=[(3),(3)]")
4. Une solution générale du système est donc donnée par
_p+bb(I)_c")
![+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1d8ed9fff79a2c456ab0414d35a7fca0.png "+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]")
5. On applique maintenant les conditions initiales pour trouver les constantes dans la solution générale.
![[(3),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cd64ae3c2ba7f96a0f0e665e718f11df.png "[(3),(3)]")
![+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]=[(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4c7c7d21f7162b4042f4181629836b02.png "+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]=[(0),(0)]")
On obtient ainsi un système de deux équations à deux inconnues.
,(2c_1+c_2=-3 ) :}")
En résolvant le système, on obtient


La solution du problème de valeur initiale est donc
![bb(I)=[(3),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b569551c19338ff3b650f7e7774b2738.png "bb(I)=[(3),(3)]")
![-2e^(-10t) [(1),(2)] +e^(-40t) [(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f3a912dda20a2d0ffb6becb48aa58ef8.png "-2e^(-10t) [(1),(2)] +e^(-40t) [(-1),(1)]")
Cela donne, dans les expressions finales pour et :
-e^(-40t)")
+e^(-40t)")
6. Pour trouver , on remplace à nouveau l’expression par et dans l’équation (6.10.1), ce qui donne
-2e^(-40t)")
L’analyse des vibrations mécaniques est cruciale pour concevoir des systèmes résistants aux charges dynamiques. Un modèle plus réaliste qui capture l’essence des systèmes mécaniques implique de considérer non seulement les masses et les ressorts, mais aussi les éléments d’amortissement et les forces externes. Cette section se concentre sur un système composé de deux masses reliées par des ressorts dans un arrangement horizontal, avec amortissement et des forces externes agissant sur les deux masses. Un tel modèle peut représenter un large éventail d’applications techniques, des suspensions de véhicules aux composants de machines. Un schéma du système est présenté à la figure 6.10.1.
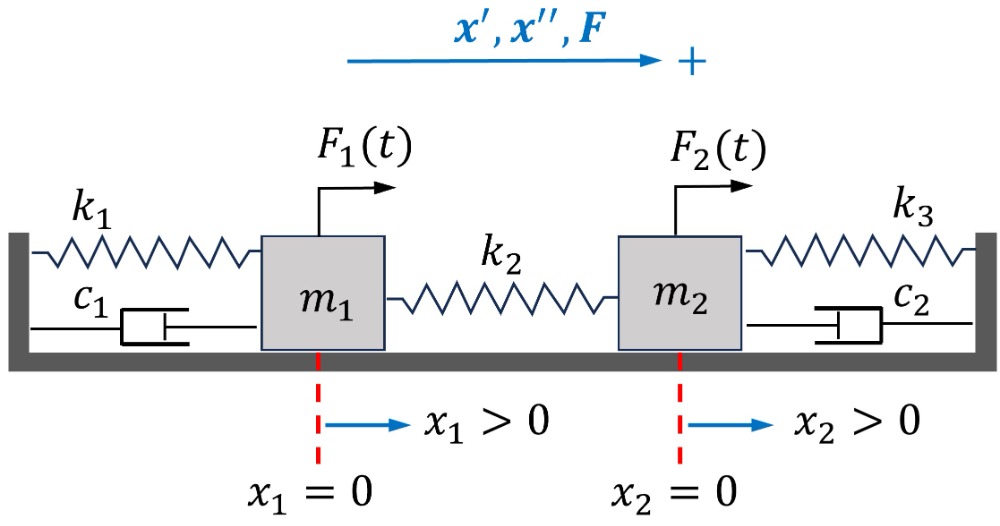
Pour procéder à la dérivation des équations du mouvement du système, on fait les hypothèses suivantes :
 pour
pour  et
et  pour
pour  . Ces coefficients quantifient la résistance au mouvement de chaque masse.
. Ces coefficients quantifient la résistance au mouvement de chaque masse.") et
et ") agissent respectivement sur et et sont considérées comme positives dans la direction droite.
agissent respectivement sur et et sont considérées comme positives dans la direction droite.Nous considérons un cas général avec un système constitué de deux masses, et , reliées par trois ressorts aux constantes de rigidité  ,
,  et
et  et augmentées par deux amortisseurs. Les ressorts extérieurs sont attachés à des parois fixes. Les forces externes agissent sur les masses et les amortisseurs contrecarrent leurs mouvements. Cette structure permet d’ajuster les forces externes et les effets d’amortissement, de façon à s’adapter aux scénarios dans lesquels ces forces sont absentes en fixant leurs valeurs respectives à zéro.
et augmentées par deux amortisseurs. Les ressorts extérieurs sont attachés à des parois fixes. Les forces externes agissent sur les masses et les amortisseurs contrecarrent leurs mouvements. Cette structure permet d’ajuster les forces externes et les effets d’amortissement, de façon à s’adapter aux scénarios dans lesquels ces forces sont absentes en fixant leurs valeurs respectives à zéro.
Dériver le système d’équations différentielles pour le système couplé amorti et forcé décrit ci-dessus (figure 6.10.1).
La dynamique de ce système amorti avec des forces externes est régie par deux équations différentielles linéaires couplées du second ordre, reflétant l’équilibre des forces sur chaque masse. Ici, on considère que la direction des forces externes est vers la droite et que les déplacements sont également positifs (sur la droite), en supposant que le déplacement de la masse 1,  , est supérieur au déplacement de la masse 2,
, est supérieur au déplacement de la masse 2,  , de sorte que <img src= »https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1ec42a5d6afa01282b848a2eae5aade4.png » alt= »x_2-x_1<0″ title= »x_2-x_1.
, de sorte que <img src= »https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1ec42a5d6afa01282b848a2eae5aade4.png » alt= »x_2-x_1<0″ title= »x_2-x_1.
1) Les forces agissant sur la masse sont
, =-k_1x_1") . ,
. , =-k_2(x_2-x_1)") , où
, où  est le déplacement du ressort du milieu.
est le déplacement du ressort du milieu.=-c_1x_1'") , où est le coefficient d’amortissement de l’amortisseur 1. Si elle est présente, la force d’amortissement est proportionnelle à la vitesse de la masse, mais dans la direction opposée au mouvement.. Il s’agit de toute force externe agissant sur la masse , qui peut être périodique ou aléatoire, et induisant des vibrations forcées.
, où est le coefficient d’amortissement de l’amortisseur 1. Si elle est présente, la force d’amortissement est proportionnelle à la vitesse de la masse, mais dans la direction opposée au mouvement.. Il s’agit de toute force externe agissant sur la masse , qui peut être périodique ou aléatoire, et induisant des vibrations forcées.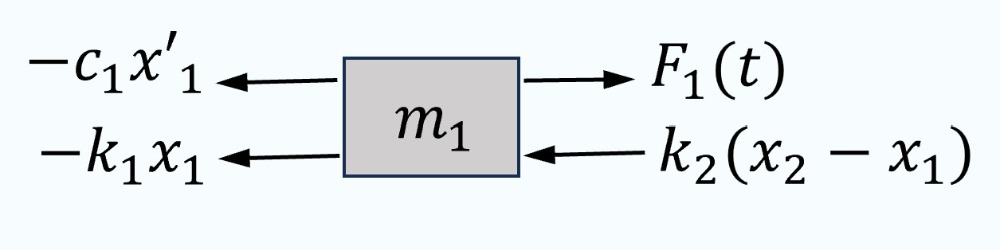
D’après la deuxième loi du mouvement de Newton,

+F_1(t)")
Cette équation peut être simplifiée en
x_1+k_2x_2+F_1(t)")
On remarque que, comme  , le ressort est comprimé et la force qu’il exerce sur la masse 1 est orientée vers la gauche (négative), le but étant de rétablir le ressort à sa longueur d’équilibre.
, le ressort est comprimé et la force qu’il exerce sur la masse 1 est orientée vers la gauche (négative), le but étant de rétablir le ressort à sa longueur d’équilibre.
2) Les forces agissant sur la masse sont
, =-k_3x_2") . ,
. , =k_2(x_2-x_1)") , où est le déplacement du ressort du milieu.
, où est le déplacement du ressort du milieu.=-c_2x_2'") , où est le coefficient d’amortissement de l’amortisseur 2. Si elle est présente, la force d’amortissement est proportionnelle à la vitesse de la masse, mais dans la direction opposée au mouvement.. Il s’agit de toute force externe agissant sur la masse , qui peut être périodique ou aléatoire, et induisant des vibrations forcées.
, où est le coefficient d’amortissement de l’amortisseur 2. Si elle est présente, la force d’amortissement est proportionnelle à la vitesse de la masse, mais dans la direction opposée au mouvement.. Il s’agit de toute force externe agissant sur la masse , qui peut être périodique ou aléatoire, et induisant des vibrations forcées.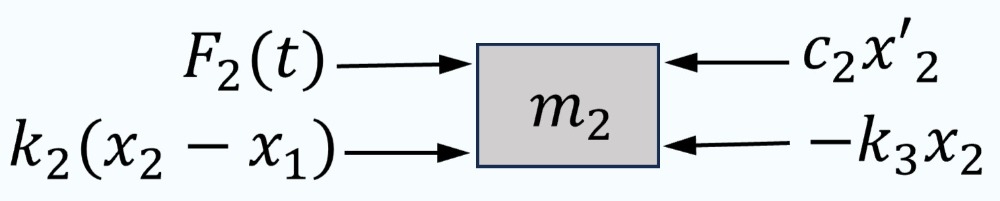
D’après la deuxième loi du mouvement de Newton,
+F_2(t)")
Cette équation peut être simplifiée en
x_2+F_2(t)")
On remarque que, comme , le ressort est comprimé et la force qu’il exerce sur la masse 2 est orientée vers la droite et devrait être positive, ce qui est cohérent avec le signe de 0″ title= »-k_2(x_2-x_1)>0″ class= »asciimath mathjax »>.
0″ title= »-k_2(x_2-x_1)>0″ class= »asciimath mathjax »>.
Par conséquent, les déplacements dépendants du temps des masses sont décrits par le système d’équations différentielles
a) Réécrire le système dérivé d’équations différentielles de l’exemple 6.10.2 en un système d’équations du premier ordre. b) Écrire le système sous forme matricielle.
a) Les équations régissant la système masse-ressort de la figure 6.10.1 sont dérivées dans l’exemple 6.10.2.
La section 6.4-C a expliqué comment convertir des équations différentielles d’ordre supérieur en un système d’équations du premier ordre. On introduit de nouvelles variables comme suit :
 ,
,  ,
,  , et
, et 
Les équations peuvent alors être écrites comme suit :

y_1+k_2y_3+F_1(t)")

y_3+F_2(t)")
b) Le système sous forme matricielle est
'(t)=Abb(y)(t)+bb(f)(t)")
![bb(y)'(t)=[(0,1,0,0),(-(k_1+k_2)/(m_1),(c_1)/(m_1),(k_2)/(m_1),0),(0,0,0,1),((k_2)/(m_2),0,-(k_2+k_3)/(m_2) ,-(c_2)/(m_2))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ce310c7d5b4cce79f6e3b2f11d0b6e39.png "bb(y)'(t)=[(0,1,0,0),(-(k_1+k_2)/(m_1),(c_1)/(m_1),(k_2)/(m_1),0),(0,0,0,1),((k_2)/(m_2),0,-(k_2+k_3)/(m_2) ,-(c_2)/(m_2))]")
![bb(y)(t)+[(0),((F_1(t))/(m_1)),(0),((F_2(t))/(m_2)) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f867fcf9fe06c04755c538d99bc7ab61.png "bb(y)(t)+[(0),((F_1(t))/(m_1)),(0),((F_2(t))/(m_2)) ]")
Considérons un système masse-ressort couplé, tel celui de l’exemple 6.10.2, avec les paramètres suivants : les deux masses et pèsent 1 kg et toutes les constantes du ressort, et sont de 1 N/m. Le système est isolé contre les forces externes et les effets d’amortissement. Au départ, les déplacements et les vitesses sont =0") m,
m, =0") m/s,
m/s, =1") m et
m et =0") m/s. Résoudre le problème de valeur initiale pour déterminer les déplacements des masses en fonction du temps. Étant donné la complexité des calculs, utiliser un logiciel d’algèbre matricielle pour trouver les valeurs propres et les vecteurs propres.
m/s. Résoudre le problème de valeur initiale pour déterminer les déplacements des masses en fonction du temps. Étant donné la complexité des calculs, utiliser un logiciel d’algèbre matricielle pour trouver les valeurs propres et les vecteurs propres.
Informations données :



 ,
, =1\ "m"") ,
, =x_2'(0)=0")
Dans l’exemple 6.10.3, on a converti un système du second ordre régissant le système masse-ressort couplé en un système du premier ordre et on l’a exprimé en notation matricielle.
où
![bb(y)=[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6ead37e9844db7674e33f1e5e5c72d9e.png "bb(y)=[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]")
En remplaçant les valeurs données, le problème de valeur initial devient
![bb(y)'(t)=[(0,1,0,0),(-2,0,1,0),(0,0,0,1),(1,0,-2 ,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a7db0bf2da8f5dd02a945f478efe1da7.png "bb(y)'(t)=[(0,1,0,0),(-2,0,1,0),(0,0,0,1),(1,0,-2 ,0)]")
![bb(y)(t), \ \ bb(y)(0)=[(0),(0),(1),(0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/698d1c885cd3cf844b1a6784ecdcad3b.png "bb(y)(t), \ \ bb(y)(0)=[(0),(0),(1),(0) ]")
En utilisant un logiciel d’algèbre matricielle, on trouve les valeurs propres et les vecteurs propres de la matrice coefficient. Les valeurs propres et les vecteurs propres se présentent sous la forme des paires complexes conjuguées suivantes :
Vecteur propre pour =+-i") :
: ![bb(u)_(1,2)=[(0),(1),(0),(1)]+-i [(-1),(0),(-1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7dcf02a0ab3cb91ba3bfb72a726ffa4a.png "bb(u)_(1,2)=[(0),(1),(0),(1)]+-i [(-1),(0),(-1),(0)]")
Vecteur propre pour =+-sqrt(3)i") :
: ![bb(u)_(3,4)=[(0),(-3),(0),(3)]+-i [(sqrt(3)),(0),(-sqrt(3)),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/63e1d7e529fb616585680175d65aaf89.png "bb(u)_(3,4)=[(0),(-3),(0),(3)]+-i [(sqrt(3)),(0),(-sqrt(3)),(0)]")
La solution pour chaque paire est donnée par l’équation présentée à la section 6.7.1.
Pour la première paire,  , les deux solutions linéairement indépendantes sont
, les deux solutions linéairement indépendantes sont
![bb"y"_1=[(0),(1),(0),(1)] cos(t)-[(-1),(0),(-1),(0)] sin( t)=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5617cb55270d2dbe12a325818021ba33.png "bb"y"_1=[(0),(1),(0),(1)] cos(t)-[(-1),(0),(-1),(0)] sin( t)=")
![[(sin(t)),(cos(t)),(sin(t)),(cos(t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8c3b481db38762e1ce5e9666b100bcbf.png "[(sin(t)),(cos(t)),(sin(t)),(cos(t))]")
![bb"y"_2=[(0),(1),(0),(1)] sin(t)+[(-1),(0),(-1),(0)]cos( t)=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f2ba801bbe97fe2bf41308d23153f7de.png "bb"y"_2=[(0),(1),(0),(1)] sin(t)+[(-1),(0),(-1),(0)]cos( t)=")
![[(-cos(t)),(sin(t)),(-cos(t)),(sin(t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7ade188ab69d14406fec6ca72e9b69ee.png "[(-cos(t)),(sin(t)),(-cos(t)),(sin(t))]")
Pour la seconde paire, i") , les deux solutions linéairement indépendantes sont
, les deux solutions linéairement indépendantes sont
![bb"y"_3=[(0),(-3),(0),(3)] cos(sqrt(3) t)-[(sqrt(3)),(0),(-sqrt(3)),(0)] sin( sqrt(3) t)=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/973eea282e06eb051aa43c5774aad673.png "bb"y"_3=[(0),(-3),(0),(3)] cos(sqrt(3) t)-[(sqrt(3)),(0),(-sqrt(3)),(0)] sin( sqrt(3) t)=")
![[(-sqrt(3) sin(sqrt(3) t)),(-3cos(sqrt(3) t)),(sqrt(3) sin(sqrt(3) t)),(3cos(sqrt(3) t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/679114a2d2dca086e4b7970db2e6e049.png "[(-sqrt(3) sin(sqrt(3) t)),(-3cos(sqrt(3) t)),(sqrt(3) sin(sqrt(3) t)),(3cos(sqrt(3) t))]")
![bb"y"_4=[(0),(-3),(0),(3)] sin(sqrt(3) t)+[(sqrt(3)),(0),(-sqrt(3)),(0)] cos( sqrt(3) t)=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b4a365690dd809c4d25c87a9451931e0.png "bb"y"_4=[(0),(-3),(0),(3)] sin(sqrt(3) t)+[(sqrt(3)),(0),(-sqrt(3)),(0)] cos( sqrt(3) t)=")
![[(sqrt(3) cos(sqrt(3) t)),(-3sin(sqrt(3) t)),(-sqrt(3) cos(sqrt(3) t)),(3sin(sqrt(3) t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e3b0651b9bc9694fcfafc66e69ea3927.png "[(sqrt(3) cos(sqrt(3) t)),(-3sin(sqrt(3) t)),(-sqrt(3) cos(sqrt(3) t)),(3sin(sqrt(3) t))]")
La matrice fondamentale du système est donc
=")
![[(bb(y)_1,bb(y)_2, bb(y)_3, bb(y)_4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/77e5c54fbb95f0b5f43f7333322df5bd.png "[(bb(y)_1,bb(y)_2, bb(y)_3, bb(y)_4)]")
![= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/601fa47b2cd520c7982e4dbbc12680b6.png "= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]")
La solution générale du système sous forme matricielle est
![bb(y)(t)= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ede967ace86f9e5be043e13235c01ab5.png "bb(y)(t)= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]")
![[(c_1),(c_2),(c_3),(c_4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c45f9355d1ce74d1e106597eb503cca6.png "[(c_1),(c_2),(c_3),(c_4)]")
En appliquant les conditions initiales, on obtient
![bb(y)(0)=[(0),(0),(1),(0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e09334cb97cec1b194b0661782673030.png "bb(y)(0)=[(0),(0),(1),(0) ]")
![[(0,-1,0,sqrt(3)),(1,0,-3,0),(0,-1,0,-sqrt(3)),(1,0,3 ,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f7c228b13a28affbcd4a1e6950dcbecd.png "[(0,-1,0,sqrt(3)),(1,0,-3,0),(0,-1,0,-sqrt(3)),(1,0,3 ,0)]")
![=[(0),(0),(1),(0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dfbd4d77a475401e4be11534640c72a1.png "=[(0),(0),(1),(0) ]")
En résolvant les coefficients, on trouve

La solution du problème de valeur initiale est donc
![[(0),(-1/2),(0),(-sqrt(3)/6)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a7328b65996b96bdf11655e6cf4ceccf.png "[(0),(-1/2),(0),(-sqrt(3)/6)]")
Elle peut s’écrire comme suit
![bb(y)=[(y_1),(y_2),(y_3),(y_4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a698eccc789d16c0387900eb67ebac57.png "bb(y)=[(y_1),(y_2),(y_3),(y_4)]")

![[(1/2cos(t)-1/2cos(sqrt(3)t)),(-1/2sin(t)+(sqrt(3))/2sin(sqrt(3)t)),(1/2cos(t)+1/2cos(sqrt(3)t)),(-1/2sin(t)-(sqrt(3))/2sin(sqrt(3)t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/542c1c51d5c60ffaf23184052651a975.png "[(1/2cos(t)-1/2cos(sqrt(3)t)),(-1/2sin(t)+(sqrt(3))/2sin(sqrt(3)t)),(1/2cos(t)+1/2cos(sqrt(3)t)),(-1/2sin(t)-(sqrt(3))/2sin(sqrt(3)t))]")
Rappelons que, dans l’exemple 10.6.3, on a introduit des variables _n") pour représenter les déplacements et les vitesses des masses.
pour représenter les déplacements et les vitesses des masses.
![[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4717b1fc82ce444670b544be6bbfe49d.png "[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]")
Étant donné cette conversion, les déplacements de la masse 1 () et de la masse 2 () en fonction du temps sont déterminés par
-1/2cos(sqrt(3)t)")
+1/2cos(sqrt(3)t)")
La représentation graphique ci-dessous montre les déplacements des deux masses au fil du temps dans un système masse-ressort couplé dans cet exemple, sur un graphique avec le temps sur l’axe horizontal (allant de 0 à 10 secondes) et le déplacement en mètres sur l’axe vertical. La ligne pour la masse 1 oscille, soit un modèle de mouvement qui varie entre des déplacements positifs et des déplacements négatifs, suggérant un mouvement harmonique complexe. La ligne de la masse 2 suit un schéma oscillatoire similaire, mais avec des différences de phase et d’amplitude par rapport à la masse 1, reflétant l’interaction entre les deux masses au moyen du système de ressorts.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=870
et pèsent 1 kg et toutes les constantes du ressort, et sont de 1 N/m. Le système est isolé contre les forces externes et les effets d’amortissement. Au départ, les déplacements et les vitesses sont m, =2") m/s,
m/s, =0") m et m/s. Résoudre le problème de valeur initiale pour déterminer les déplacements des masses en fonction du temps. Utilise un logiciel d’algèbre matricielle pour trouver les valeurs propres et les vecteurs propres.
m et m/s. Résoudre le problème de valeur initiale pour déterminer les déplacements des masses en fonction du temps. Utilise un logiciel d’algèbre matricielle pour trouver les valeurs propres et les vecteurs propres.
+sqrt(3)/3sin(sqrt(3)t)")
-sqrt(3)/3sin(sqrt(3)t)")
VII
Ce chapitre donne un bref aperçu des équations différentielles partielles, qui impliquent des dérivées partielles d’une fonction par rapport à plusieurs variables indépendantes.
7.1 Introduction : cette section présente les conditions initiales et les conditions aux limites, essentielles pour résoudre des problèmes de valeur initiale aux limites dans les EDP.
7.2 Série de Fourier : cette section passe en revue les séries de Fourier, un outil crucial pour exprimer la solution d’équations différentielles partielles.
7.3 Équation de la chaleur : cette section traite de l’utilisation de la méthode de séparation des variables pour résoudre l’équation de la chaleur, qui décrit comment la chaleur se diffuse dans un milieu au fil du temps.
7.4 Équation des ondes : Cette section présente brièvement la solution de l’équation des ondes, qui modélise la propagation des ondes, telles que les ondes sonores et lumineuses, à travers un milieu.

Maryam Mirzakhani, née en 1977 à Téhéran, en Iran, est une mathématicienne d’avant-garde dont les profondes contributions à la géométrie et aux systèmes dynamiques ont remodelé notre compréhension de ces domaines. Son parcours mathématique, qui a commencé par de retentissants succès aux Olympiades internationales de mathématiques, s’est achevé par l’obtention de la prestigieuse médaille Fields en 2014, faisant d’elle la première femme à recevoir cet honneur. Les travaux novateurs de Maryam Mirzakhani à l’université de Harvard, sous la direction de Curtis McMullen, se sont concentrés sur la géométrie complexe des surfaces de Riemann et de leurs espaces de modules, recoupant des domaines tels que la géométrie hyperbolique et la théorie de Teichmüller. Réputée pour sa réflexion profonde et créative et sa capacité à établir des liens entre différents domaines mathématiques, Mirzakhani ne s’est pas seulement contentée de résoudre des problèmes de longue date, mais a également inspiré toute une génération, en particulier des femmes et des jeunes filles dans le domaine des STIM, grâce à son intelligence et à sa persévérance remarquables. Son héritage en tant que symbole de la curiosité intellectuelle et de l’innovation fait d’elle une figure exemplaire pour illustrer la portée et l’importance des concepts mathématiques.
38
Contrairement aux équations différentielles ordinaires (EDO), qui impliquent des dérivées par rapport à une seule variable, les équations différentielles partielles (EDP) impliquent des dérivées partielles d’une fonction par rapport à plusieurs variables indépendantes. Essentiellement, une EDP est une équation qui relie les dérivées partielles d’une fonction de plusieurs variables.
Les EDP sont fondamentales pour modéliser et comprendre les systèmes complexes du monde naturel, par exemple en physique, permettant de décrire la mécanique des ondes, les champs électromagnétiques et le transfert de chaleur. Par exemple, les équations de Maxwell, qui constituent la pierre angulaire de la théorie électromagnétique, sont exprimées sous forme d’EDP ou, dans le domaine de l’ingénierie, pour l’analyse des contraintes et des déformations dans les matériaux, la dynamique des fluides et la thermodynamique.
Dans le contexte des équations différentielles, particulièrement pertinent pour les étudiants en ingénierie, la compréhension des problèmes de conditions aux limites et des problèmes de valeur initiale est cruciale.
Un problème de conditions aux limites, ou problème aux limites, implique la résolution d’une équation différentielle soumise à un ensemble de contraintes appelées conditions aux limites. Ces conditions spécifient le comportement d’une solution aux limites du domaine sur lequel l’équation est définie. Dans le cas des équations différentielles partielles (EDP), ces domaines sont souvent spatiaux et les limites peuvent être physiques ou géométriques.
Un problème de valeur initiale, en revanche, implique la résolution d’une équation différentielle en fonction de la valeur de la solution en un point spécifique, souvent le début du domaine temporel. Pour les EDO et les EDP dépendantes du temps, ces conditions initiales spécifient l’état du système au début de la période observée.
pour les problèmes dépendants du temps. Elles sont essentielles pour déterminer l’évolution unique du système au fil du temps.39
Pour résoudre des équations différentielles partielles, on emploie souvent une méthode qui transforme les équations différentielles partielles complexes en équations différentielles ordinaires plus simples. Une étape clé de cette méthode consiste à exprimer les fonctions sous forme de séries de Fourier trigonométriques. Cette section donne donc un bref aperçu des séries de Fourier, ce qui nous permettra d’aborder efficacement la résolution des équations différentielles partielles dans les sections suivantes.
Une série de Fourier est une expansion d’une fonction ") en termes d’une somme infinie de sinus et de cosinus. La série permet d’exprimer une forme d’onde périodique complexe comme une combinaison de fonctions oscillantes simples.
en termes d’une somme infinie de sinus et de cosinus. La série permet d’exprimer une forme d’onde périodique complexe comme une combinaison de fonctions oscillantes simples.
La formule pour une série de Fourier d’une fonction définie dans l’intervalle  est
est
![f(x) = a_0 + somme_{n = 1}^{infty} [a_n cos(frac{npi x}{L}) + b_n sin(frac{npi x}{L})]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8c13e408d45e96ba59b43f35c374f63a.png "f(x) = a_0 + somme_{n = 1}^{infty} [a_n cos(frac{npi x}{L}) + b_n sin(frac{npi x}{L})]")
où  ,
,  et
et  sont les coefficients de Fourier qui déterminent la grandeur des termes correspondants en sinus et en cosinus. Ils sont calculés comme suit :
sont les coefficients de Fourier qui déterminent la grandeur des termes correspondants en sinus et en cosinus. Ils sont calculés comme suit :
 dx")
 cos(frac{npi x}{L}) dx") pour
pour 
 sin(frac{npi x}{L}) dx") pour
pour
Dans certains cas, la fonction peut avoir des symétries spécifiques, qui simplifient la série de Fourier :
Série de sinus : si est une fonction impaire (à savoir  = -f(x)") ), les termes en cosinus de la série de Fourier disparaissent et seules les termes en sinus subsistent. Il s’ensuit une série de sinus, qui est particulièrement utile pour les fonctions définies sur des intervalles symétriques et satisfaisant certaines conditions aux limites, comme la nullité aux extrémités.
), les termes en cosinus de la série de Fourier disparaissent et seules les termes en sinus subsistent. Il s’ensuit une série de sinus, qui est particulièrement utile pour les fonctions définies sur des intervalles symétriques et satisfaisant certaines conditions aux limites, comme la nullité aux extrémités.
Série de cosinus : si est une fonction paire (à savoir  = f(x)") ), les termes en sinus disparaissent, ne laissant que les termes en cosinus. La série de cosinus obtenue est utile pour les problèmes dans lesquels la dérivée de est nulle aux extrémités.
), les termes en sinus disparaissent, ne laissant que les termes en cosinus. La série de cosinus obtenue est utile pour les problèmes dans lesquels la dérivée de est nulle aux extrémités.
Les séries de Fourier font partie intégrante de la résolution des EDP, en particulier lorsque l’on utilise la méthode de séparation des variables. Cette méthode exige souvent que les conditions aux limites soient satisfaites, ce qui est possible avec la série de Fourier. En exprimant une fonction sous la forme d’une série de Fourier, les EDP peuvent être transformées en EDO plus simples, chacune associée à une composante de fréquence différente de la fonction d’origine.
Trouver la série de Fourier Series de  = x") sur
sur ![[-2,2]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ef8463565c3162f8ddceeb520d873307.png "[-2,2]") .
.
L’extrémité  est 2. La série de Fourier est donc
est 2. La série de Fourier est donc
![f(x) = a_0 + somme_{n = 1}^{infty} [a_n cos(frac{npi x}) + b_n sin(frac{npi x})]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/71a2f4d72f12ba29d6440b7e00367736.png "f(x) = a_0 + somme_{n = 1}^{infty} [a_n cos(frac{npi x}) + b_n sin(frac{npi x})]")
où

 dx,")
 dx,")
étant une fonction impaire, et sont nuls. De même,  et le sinus étant tous deux des fonctions impaires, leur produit est une fonction paire. Ainsi, l’intégrale sur un intervalle symétrique de peut être simplifiée en
et le sinus étant tous deux des fonctions impaires, leur produit est une fonction paire. Ainsi, l’intégrale sur un intervalle symétrique de peut être simplifiée en
 dx")
On évalue à l’aide de la technique de l’intégration par parties.
![= [-(2x) / (npi)cos((npix) / 2)]_0^2 + 2 / (npi) int_0^2cos((npix) / 2 )dx](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ee2f315dfd92ffe0c76e4075db0a1e2b.png "= [-(2x) / (npi)cos((npix) / 2)]_0^2 + 2 / (npi) int_0^2cos((npix) / 2 )dx")
![= [-(2x) / (npi)cos((npix) / 2) + 4 / (npi)^2 sin((npix) / 2 )]_0^2](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cbc0f94be4fbad554f50070e1867ff6a.png "= [-(2x) / (npi)cos((npix) / 2) + 4 / (npi)^2 sin((npix) / 2 )]_0^2")
) / (npi)")
Étant donné  = (-1)^n") , est simplifié en
, est simplifié en
^(n+1)) / (npi)")
La série de Fourier est donc
 = somme_{n = 1}^{infty} (4(-1)^(n + 1)) / (npi) sin(frac{npi x})")
La figure ci-dessous représente graphiquement (ligne noire pleine) et son approximation par les sommes partielles de sa série de Fourier sur pour  (courbe en pointillés bleus) et
(courbe en pointillés bleus) et  (courbe en pointillés rouges).
(courbe en pointillés rouges).
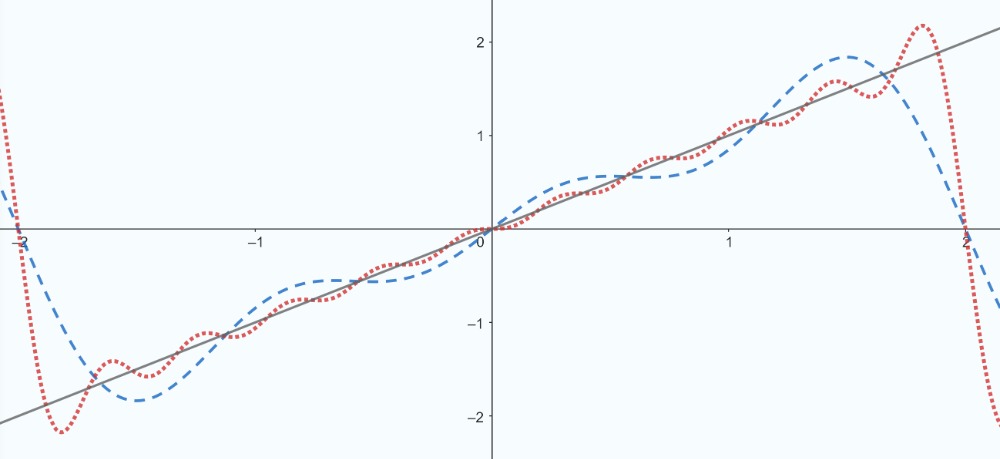
La figure interactive ci-dessous présente une comparaison visuelle entre l’approximation de la série de Fourier d’une fonction mathématique et la fonction linéaire , tracée sur l’intervalle ![[−2,2]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/831ced5ca2e4ac94c223e66ad444a634.png "[−2,2]") . L’approximation de la série de Fourier, représentée par une ligne en pointillés bleus, illustre la manière dont une fonction peut être représentée comme une somme de fonctions sinusoïdales plus simples. Le nombre de termes inclus dans l’approximation de la série de Fourier peut être ajusté dynamiquement à l’aide d’un curseur interactif, allant de 1 à 10 termes. Cette caractéristique permet d’observer l’impact de l’augmentation du nombre de termes de la série sur la précision de l’approximation de la fonction réelle. La fonction linéaire est représentée par une ligne pleine rouge pour référence.
. L’approximation de la série de Fourier, représentée par une ligne en pointillés bleus, illustre la manière dont une fonction peut être représentée comme une somme de fonctions sinusoïdales plus simples. Le nombre de termes inclus dans l’approximation de la série de Fourier peut être ajusté dynamiquement à l’aide d’un curseur interactif, allant de 1 à 10 termes. Cette caractéristique permet d’observer l’impact de l’augmentation du nombre de termes de la série sur la précision de l’approximation de la fonction réelle. La fonction linéaire est représentée par une ligne pleine rouge pour référence.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=281
Trouver la série de Fourier Series de  = x^2") sur .
sur .
L’extrémité est 2. La série de Fourier est donc
où

 dx,")
 dx,")
est une fonction paire, alors que le sinus est une fonction impaire, de sorte que leur produit est une fonction impaire. Ainsi,  . Le produit du cosinus (aussi une fonction paire) et de
. Le produit du cosinus (aussi une fonction paire) et de  est une fonction paire, de sorte que et peuvent être simplifiés en
est une fonction paire, de sorte que et peuvent être simplifiés en
![a_0 = 1 / 2 int_{0}^ x^2 dx = 1 / 2[x^3 / 3]_0^2 = 4 / 3](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/98bb30911e9d0606e28c629f39ff5c90.png "a_0 = 1 / 2 int_{0}^ x^2 dx = 1 / 2[x^3 / 3]_0^2 = 4 / 3")
 dx")
Pour évaluer , il faut utiliser la technique d’intégration par parties deux fois.
![= [(2x^2) / (npi)sin((npix) / 2)]_0^2-4 / (npi) int_0^2 xsin((npix) / 2 ) dx](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c82846c6e37aa3b1c10f4158ec167e0a.png "= [(2x^2) / (npi)sin((npix) / 2)]_0^2-4 / (npi) int_0^2 xsin((npix) / 2 ) dx")
![= [(2x^2) / (npi)sin((npix) / 2)-16 / (npi)^3((-npi) / 2xcos((npix) / 2) + sin((npix) / 2))]_0^2](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f7cbc193b0ec6fb70a3a01f669ad0db2.png "= [(2x^2) / (npi)sin((npix) / 2)-16 / (npi)^3((-npi) / 2xcos((npix) / 2) + sin((npix) / 2))]_0^2")
cos(npi)")
Étant donné , peut être simplifié en
^(n)) / (n^2pi^2)")
La série de Fourier est donc
 = 4 / 3 + somme_{n = 1}^{infty} (16(-1)^(n)) / (n^2pi^2) cos(frac{npi x})")
La figure ci-dessous représente graphiquement (ligne noire pleine) et son approximation par les sommes partielles de sa série de Fourier sur pour (courbe en pointillés rouges).
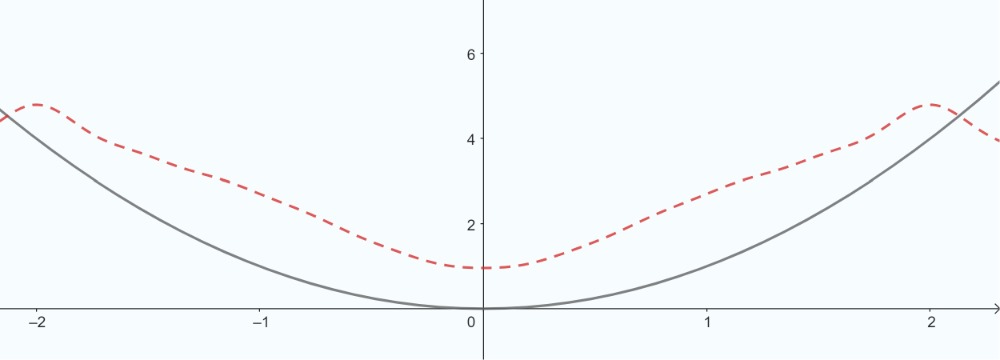
La figure interactive ci-dessous présente une comparaison visuelle entre l’approximation de la série de Fourier d’une fonction mathématique et la fonction linéaire , tracée sur l’intervalle . L’approximation de la série de Fourier, représentée par une ligne en pointillés bleus, illustre la manière dont une fonction peut être représentée comme une somme de fonctions sinusoïdales plus simples. Le nombre de termes inclus dans l’approximation de la série de Fourier peut être ajusté dynamiquement à l’aide d’un curseur interactif, allant de 1 à 10 termes. Cette caractéristique permet d’observer l’impact de l’augmentation du nombre de termes de la série sur la précision de l’approximation de la fonction réelle. La fonction est représentée par une ligne pleine rouge pour référence.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=281
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=281
 sur l’intervalle donné.
sur l’intervalle donné.  = 4 x") ,
, ![[-1,1]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/557727178bd58255d8caa19f5372ddb4.png "[-1,1]")
 = somme_{n=1}^{infty} (8(-1)^(n+1)) / (npi) sin(npi x)")
sur l’intervalle donné.  = 1-x^2") ,
,
 = 2 / 3 - somme_{n=1}^{infty} (4(-1)^(n)) / (n^2pi^2) cos(npi x)")
40
Cette section aborde la méthode de séparation des variables pour résoudre des équations différentielles partielles couramment rencontrées en physique mathématique, telles que les équations de la chaleur et des ondes. Cette méthode simplifie les équations différentielles partielles complexes en équations différentielles ordinaires plus faciles à gérer. Bien que les algorithmes informatiques tels que les différences finies et les éléments finis soient fréquemment employés pour résoudre des équations différentielles partielles, leur précision peut être difficile à évaluer. C’est pourquoi la méthode analytique de séparation des variables est importante pour vérifier les résultats de ces méthodes de calcul.
L’équation de la chaleur décrit la diffusion de la chaleur dans un milieu au fil du temps. Elle est formulée en considérant un élément de petit volume à l’intérieur du matériau, où le taux de variation d’énergie thermique est égal au flux de chaleur net. En représentant la température au point et à l’instant  par
par ") , l’équation de la chaleur en une dimension peut être exprimée sous la forme
, l’équation de la chaleur en une dimension peut être exprimée sous la forme

 représente le taux de variation de la température dans le temps,
représente le taux de variation de la température dans le temps,  (où
(où  est la diffusivité thermique du matériau) est une constante qui combine la conductivité thermique, la densité et la capacité thermique spécifique du matériau et
est la diffusivité thermique du matériau) est une constante qui combine la conductivité thermique, la densité et la capacité thermique spécifique du matériau et  (le laplacien de
(le laplacien de  ) représente la divergence du gradient de température, indiquant comment la température change dans l’espace autour de n’importe quel point. Dans une dimension, comme une simple tige, le laplacien de est simplifié en
) représente la divergence du gradient de température, indiquant comment la température change dans l’espace autour de n’importe quel point. Dans une dimension, comme une simple tige, le laplacien de est simplifié en  / (delx^2)") . L’équation de la chaleur devient donc
. L’équation de la chaleur devient donc  / (delt)(x,t) = beta^2(del^2u) / (delx^2)(x,t)")
Pour résoudre cette équation, il faut définir des conditions aux limites et des conditions initiales. La condition initiale spécifie la distribution de la température dans tout le domaine au moment initial, généralement . Par exemple, pour une tige ou un domaine unidimensionnel similaire, la condition initiale peut être  = f(x)") , où décrit la distribution de la température le long de la tige au moment initial.
, où décrit la distribution de la température le long de la tige au moment initial.
Prenons une tige uniforme d’une longueur dont les deux extrémités sont maintenues à une température nulle constante. L’équation de la chaleur en une dimension est
Pour une température nulle aux deux extrémités de la tige, les conditions aux limites sont
 = 0 quad text{and} quad u(L, t) = 0")
La distribution initiale de la température le long de la tige est donnée par
 = f(x)")
En utilisant la méthode de séparation des variables, on suppose que la solution peut être écrite comme le produit de deux fonctions, l’une dépendant uniquement de et l’autre uniquement de .
 = X(x)T(t)")
En substituant la forme de la solution dans l’équation de la chaleur, on obtient
X(x) = beta^2X''(x)T(t)")
En divisant l’équation par T(t)") , on trouve
, on trouve
}{T(t)} = frac{X''(x)}{X(x)}")
Cette équation est scindée en deux équations différentielles ordinaires (EDO) parce que le côté gauche dépend uniquement de et le côté droit uniquement de . Pour que cette équation soit valable pour toutes les valeurs de et , chacun des côtés de l’équation doit être indépendamment égal à une constante. En effet, la seule façon pour qu’une fonction de soit égale à une fonction de en toutes circonstances est que les deux soient égales à la même valeur constante. Par conséquent, on définit pour les deux côtés de l’équation une constante négative, notée  ,
,  devenant ainsi la constante de séparation. Par convention, le signe négatif est ajouté pour simplifier les étapes suivantes.
devenant ainsi la constante de séparation. Par convention, le signe négatif est ajouté pour simplifier les étapes suivantes.
}{T(t)} = frac{X''(x)}{X(x)} = -lambda")
On obtient donc deux EDO distinctes.
}{X(x)} = -lambda")
}{T(t)} = -lambda")
Pour résoudre la partie spatiale de l’équation différentielle ordinaire (EDO), il faut d’abord réarranger l’équation
 + lambda X(x) = 0")
 = 0") est la solution triviale à ce problème de conditions aux limites. Toutefois, nous nous intéressons ici aux solutions non triviales, car elles fournissent des indications utiles sur le comportement du système dans diverses conditions. Une valeur de pour laquelle ce problème a une solution non triviale est appelée valeur propre du problème et les solutions son triviales sont les fonctions propres associées à ce . Ces fonctions propres, contrairement à la solution triviale, permettent de mieux comprendre la dynamique et les caractéristiques du système.
est la solution triviale à ce problème de conditions aux limites. Toutefois, nous nous intéressons ici aux solutions non triviales, car elles fournissent des indications utiles sur le comportement du système dans diverses conditions. Une valeur de pour laquelle ce problème a une solution non triviale est appelée valeur propre du problème et les solutions son triviales sont les fonctions propres associées à ce . Ces fonctions propres, contrairement à la solution triviale, permettent de mieux comprendre la dynamique et les caractéristiques du système.
 = r^2 + lambda") . En fonction du signe de , il y a trois cas à considérer.
. En fonction du signe de , il y a trois cas à considérer.Cas n° 1 : 
Dans ce cas, les racines de ") sont complexes et la solution est
sont complexes et la solution est
 = c_1cos(sqrt(lambda)x) + c_2sin(sqrt(lambda)x)")
En appliquant les premières conditions aux limites  = 0") , on trouve
, on trouve  . En appliquant les deuxièmes conditions aux limites
. En appliquant les deuxièmes conditions aux limites  = 0") , on obtient l’équation
, on obtient l’équation ) = 0") . Pour obtenir une solution non triviale, la fonction sinusoïdale doit elle-même être nulle.
. Pour obtenir une solution non triviale, la fonction sinusoïdale doit elle-même être nulle.
) = 0")

 = npi") for
for
Par conséquent, les valeurs propres positives et leurs fonctions propres associées de ce problème aux limites sont
^2 quad text{and} quad X_n(x) = singauche( frac{npi x}{L} droite)") pour
pour
Cas n° 2 : 
En ce cas, la solution générale de l’équation différentielle est
 = c_1 + c_2x")
En appliquant les premières conditions aux limites , on trouve . En appliquant les deuxièmes conditions aux limites , on obtient  . Dans ce cas, la seule solution est la solution triviale, qui est rejetée.
. Dans ce cas, la seule solution est la solution triviale, qui est rejetée.
Cas n° 3 : ![]()
Dans ce cas, les racines de sont un nombre réel, ce qui donne la solution
 = c_1e^(-sqrt(lambda)x) + c_2e^(sqrt(lambda)x)")
En appliquant les premières conditions aux limites , on trouve  . Les deuxièmes conditions aux limites donnent
. Les deuxièmes conditions aux limites donnent ) + c_2e^(Lsqrt(lambda)) = 0") . En résolvant le système pour et , on obtient
. En résolvant le système pour et , on obtient
) -e^(-Lsqrt(lambda)) ) = 0")
Comme on cherche une solution non triviale, le terme entre parenthèses doit être nul.
) -e^(-Lsqrt(lambda)) = 0")
Cependant, cette équation n’est valable que si , ce qui contredit notre hypothèse <img src= »https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/79708daaf98b414553609f83fdd1f624.png » alt= »lambda<0″ title= »lambda. On conclut donc que doit être égal à zéro, ce qui donne une solution triviale.
Par conséquent, les seules valeurs et fonctions propres valables pour la partie spatiale de l’équation sont réalisées lorsque . Elles sont données par
pour
et substituer les valeurs propres précédemment déterminées ^2") , ce qui transforme l’EDO temporelle en
, ce qui transforme l’EDO temporelle en
 + beta^2 gauche( frac{npi}{L} droite)^2 T(t) = 0")
Pour chaque valeur propre  , la solution à cette équation différentielle est
, la solution à cette équation différentielle est
 = ce^{-beta^2 gauche( frac{npi}{L} droite)^2 t}") pour
pour
où  représente une constante arbitraire. La série de fonctions
représente une constante arbitraire. La série de fonctions ") décrit l’évolution de la température dans le temps pour chaque mode spatial
décrit l’évolution de la température dans le temps pour chaque mode spatial  .
.
Pour construire la solution générale de l’équation de la chaleur, on combine la solution spatiale et la solution temporelle en une série composite.
Étant donné les solutions  = singauche( frac{npi x}{L} droite)") et , la forme combinée pour chaque mode est
et , la forme combinée pour chaque mode est
 = B_n singauche( frac{npi x}{L} droite) e^{-beta^2 gauche( frac{npi}{L} droite)^2 t}") pour
pour
Notée en série, elle devient
où la constante de la solution temporelle est représentée par  pour chaque , car cette constante peut varier avec chaque terme de la série. Pour trouver le coefficient , on applique la condition initiale . Ce qui donne
pour chaque , car cette constante peut varier avec chaque terme de la série. Pour trouver le coefficient , on applique la condition initiale . Ce qui donne
 = f(x) = somme_(n = 1)^ooB_n sin((npix) / L)")
Il s’agit de la représentation en série sinusoïdale de Fourier de sur l’intervalle ![[0,L]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f735caea0d128c5937b57c7ef8a1e6cb.png "[0,L]") . Les coefficients sont déterminés par
. Les coefficients sont déterminés par
Trouver la solution au problème de valeur initiale aux limites décrivant un flux thermique
 / (delt)(x,t) = 5(del^2u) / (delx^2)(x,t) \ ,")


 = u(pi,t) = 0\ ,")

 = 6sin(x) + 7sin(5x)")
En comparant l’équation différentielle partielle à l’équation de la section 7.3.1, on observe que  et
et  . Étant donné que la condition initiale est une combinaison linéaire de quelques fonctions sinusoïdales (fonctions propres), il suffit simplement de trouver la combinaison de termes dans la solution générale de la section 7.3.2 satisfaisant la condition initiale
. Étant donné que la condition initiale est une combinaison linéaire de quelques fonctions sinusoïdales (fonctions propres), il suffit simplement de trouver la combinaison de termes dans la solution générale de la section 7.3.2 satisfaisant la condition initiale ") .
.
 e^0 =")
 + 7sin(5x)")
 =")
D’après l’argument des fonctions sinus, les deux termes correspondent respectivement à  et
et  . De même,
. De même,  et
et  . Tous les autres coefficients sont nuls.
. Tous les autres coefficients sont nuls.
La solution du problème de flux thermique est donc
 = somme_(n = 1)^oo B_n e^(-beta^2(npi / / L)^2t)sin((npix) / L)")
 = B_1e^(-5((1)pi / / pi)^2t)sin(((1)pix) / pi) + B_5e^(-5((5)pi / / pi)^2t)sin(((5)pix) / pi)")
 = 6e^(-5t)sin(x) + 7e^(-125 t)sin(5x)")
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=283
Trouver la solution au problème de valeur initiale aux limites décrivant un flux thermique
 / (delt)(x,t) = 9(del^2u) / (delx^2)(x,t) \ ,")

 = u(4,t) = 0\ ,")
 = x")
En comparant l’équation à l’équation 7.3.1, on observe que  ,
,  et . Contrairement à l’exemple précédent, la fonction de condition initiale n’est pas similaire aux fonctions propres (fonctions sinusoïdales). Par conséquent, il faut d’abord trouver avec l’équation 7.3.3.
et . Contrairement à l’exemple précédent, la fonction de condition initiale n’est pas similaire aux fonctions propres (fonctions sinusoïdales). Par conséquent, il faut d’abord trouver avec l’équation 7.3.3.
sin((npix) / L)dx")
 / 4)dx")
Avec l’intégration par parties, on a
![B_n = [-2 / (npi)xcos((npix) / 4)]_0^4 + 2 / (npi)int_0^4cos((npix) / 4)dx](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ee57ec804bc06cf6795e24a20e6da4f6.png "B_n = [-2 / (npi)xcos((npix) / 4)]_0^4 + 2 / (npi)int_0^4cos((npix) / 4)dx")
cos(npi) + 8 / (n^2pi^2) sin(npi)")
^(n + 1)8 / (npi)")
La solution est donc
 = 8 / (pi)somme_(n = 1)^oo (-1)^(n + 1) / n e^(-9(npi / / 4)^2t)sin((npix) / 4)")
La figure ci-dessous montre la somme partielle de la solution .
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=283
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=283
Les conditions aux limites de Neumann spécifient la valeur de la dérivée (gradient) de la température à la limite, représentant souvent des surfaces isolées ou adiabatiques où il n’y a pas de flux de chaleur. Par exemple,  / (delx)(0,t) = 0") peut représenter une extrémité de la tige parfaitement isolée.
peut représenter une extrémité de la tige parfaitement isolée.
Pour développer une solution pour l’équation de la chaleur avec des conditions aux limites de Neumann, on utilise la méthode de séparation des variables.
Prenons une tige uniforme de longueur dont les deux extrémités sont parfaitement isolées (aucun flux de chaleur n’entre dans la tige ou n’en sort) et dont la température aux deux extrémités est maintenue constante. L’équation de la chaleur en une dimension est

Pour les extrémités isolées, la dérivée (gradient) de la température à la limite est zéro. Les conditions aux limites de Neumann sont donc
 = 0 quad text{and} quad u_x(L, t) = 0")
La distribution initiale de la température le long de la tige est donnée par
La solution de ce problème aux limites est
où
 = A_0 + somme_{n = 1}^{infty} A_n cos( frac{npi x}{L} )")
est la série cosinusoïdale de Fourier de sur et les coefficients  et
et  sont donnés par
sont donnés par
Trouver la solution au problème de valeur initiale aux limites décrivant un flux thermique
 / (delt)(x,t) = 4(del^2u) / (delx^2)(x,t) \ ,")

 = u_x(2,t) = 0\ ,")
 = 5x^2,")
En comparant l’équation à l’équation 7.3.1, on observe que  ,
,  et
et  = 5x^2") . Il faut d’abord trouver les coefficients et . On utilise l’équation de la section 7.3.5.
. Il faut d’abord trouver les coefficients et . On utilise l’équation de la section 7.3.5.
 dx")
![A_0 = frac int_{0}^ 5x^2 dx = 5 / 2[x^3 / 3]_0^2 = 20 / 3](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b3c92d3b38819686132c35076eca2b63.png "A_0 = frac int_{0}^ 5x^2 dx = 5 / 2[x^3 / 3]_0^2 = 20 / 3")
On applique l’équation de la section 7.3.6 pour trouver .
 cos(frac{npi x}{L}) dx")
 dx")
Avec l’intégration par parties, on a
![= [(10x^2) / (npi)sin((npix) / 2)]_0^2-20 / (npi) int_0^2 xsin((npix) / 2 ) dx](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1c3b94bc15cfde4dfc909658aedf905f.png "= [(10x^2) / (npi)sin((npix) / 2)]_0^2-20 / (npi) int_0^2 xsin((npix) / 2 ) dx")
![= [(10x^2) / (npi)sin((npix) / 2)-80 / (npi)^3((-npi) / 2xcos((npix) / 2) + sin((npix) / 2))]_0^2](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7b1ebbcc1eae671412e5fd99aaab1920.png "= [(10x^2) / (npi)sin((npix) / 2)-80 / (npi)^3((-npi) / 2xcos((npix) / 2) + sin((npix) / 2))]_0^2")
cos(npi)")
Étant donné que , est simplifié en
^(n)) / (n^2pi^2)")
La solution générale est donc donnée par l’équation de la section 7.3.4
 = A_0 + somme_{n = 1}^{infty} A_n cos( frac{npi x}{L} ) e^{-beta^2 ( frac{npi}{L} )^2 t}")
^(n)) / (n^2pi^2) cos( frac{npi x} ) e^{-4 ( frac{npi} )^2 t}")
La figure ci-dessous montre la somme partielle de la solution .
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=283
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=283
 / (del t) = 5 (del^2u) / (del x^2),")

 = u(3,t) = 0,")
 = 6,")

 = somme_(n = 1)^oo(12(1-(-1)^n)) / (npi)sin((npix) / 3)e^(-5((npi) / 3)^2t)")
 / (delt)(x,t) = 2(del^2u) / (delx^2)(x,t) \ ,")

 = -2sin(4x)-7sin(5x),")
 = -2 e^(-32t)sin(4x)-7 e^(-50t)sin(5x)")
 / (delt)(x,t) = 6 (del^2u) / (delx^2)(x,t) ,")
 = u_x(3,t) = 0,")
 = 5 x^2,")
 = 15 + somme_(n = 1)^oo(180 (-1)^n) / (n^2 pi^2) cos((n pi x) / 3) e^(-6((n pi) / 3)^2 t)")
41
L’équation des ondes modélise la propagation des ondes, telles que les ondes sonores, les ondes lumineuses ou les ondes aquatiques, à travers un milieu. Elle rend compte de la façon dont ces ondes se déplacent et changent dans le temps et dans l’espace. L’équation des ondes pour le problème de valeur initiale aux limites portant sur le déplacement (déflexion) d’une corde qui vibre et dont les extrémités sont maintenues fixes est
 = u(L,t) = 0\ ,")
 = f(x)\ ,")
 / (delt)(x,0) = g(x)\ ,")
En utilisant la méthode de séparation des variables, on trouve la solution formelle de ce problème de valeur initiale aux limites :
où
 = somme_(n = 1)^ooA_n sin((npix) / L)") et
et  = somme_(n = 1)^ooB_n sin((npix) / L)")
sont les séries sinusoïdales de Fourier de et ") sur et
sur et
sin((npix) / L) dx") et
et sin((npix) / L) dx")
Trouver la solution au problème de la corde qui vibre
 / (delt^2)(x,t) = 4(del^2u) / (delx^2)(x,t) \ ,")
 ,
,
 = sin(3x)-1 / 2sin(5x) ,")
 / (delt)(x,0) = sin(4x) + 2sin(6x)\ ,")
En comparant l’équation à l’équation 7.4.1, on observe que  , ,
, ,  = sin(3x)-1 / 2sin(5x)") et que
et que  = sin(4x) + 2sin(6x)") . Comme et
. Comme et  sont exprimés en termes de fonctions sinusoïdales, il est possible de déterminer les valeurs des coefficients et en transformant et en et
sont exprimés en termes de fonctions sinusoïdales, il est possible de déterminer les valeurs des coefficients et en transformant et en et ") , respectivement.
, respectivement.
En remplaçant dans l’équation 7.4.2, on obtient
 =")
^oo (A_n cos(0) + B_n / (2n)sin(0) )sin(nx)")
^oo A_nsin(nx)")
À partir des valeurs initiales aux limites, on a
 = sin(3x)-1 / 2sin(5x)")
Par conséquent,
^oo A_nsin(nx)")
-1 / 2sin(5x)")
En égalisant les coefficients des termes similaires, on constate que
 et
et 
tandis que les coefficients restants sont nuls. De même, en différenciant partiellement l’équation de la section 7.4.2 par rapport à et en substituant , on obtient
 / (delt)(x,t)")
^oo (-2nA_n sin(2nt) + B_ncos(2nt) )sin(nx)")
 / (delt)(x,0)")
^oo (-2nA_n sin(0) + B_ncos(0) )sin(nx)")
^oo B_nsin(nx)")
À partir des valeurs initiales aux limites, on a
 / (delt)(x,0) = sin(4x) + 2sin(6x)")
Par conséquent,
^oo B_nsin(nx)")
 + 2sin(6x)")
En égalisant les coefficients des termes similaires, on constate que
 et
et 
tandis que les coefficients restants sont nuls.
La solution du problème est donc
 = somme_(n = 1)^oo (A_n cos(2nt) + B_n / (2n)sin(2nt))sin(nx)")
 = cos(6t)sin(3x) + 1 / 8sin(8t)sin(4x)")
sin(5x) + 1 / 6sin(12t)sin(6x)")
La figure représente sous forme schématique.
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=285
Un ou plusieurs éléments interactifs ont été exclus de cette version du texte. Vous pouvez les consulter en ligne ici : https://ecampusontario.pressbooks.pub/diffeq/?p=285
 / (delt^2)(x,t) = 9 (del^2u) / (delx^2)(x,t) ,")

 = u(pi,t) = 0,")
 = -sin(x) + 3sin(7x),")
 / (delt)(x,0) = -2sin(4x) + sin(10x)")

 = -cos(3t)sin(x)-1 / 6sin(12t)sin(4x) +")
sin(7x) + 1 / 30sin(30t)sin(10x)")
 / (delt^2)(x,t) = 4 (del^2u) / (delx^2)(x,t) ,")
 = -sin(x) + 3sin(3x),")
 / (delt)(x,0) = -4sin(2x) + 3sin(6x)")
 = -cos(2t)sin(x)-sin(4t)sin(2x) +")
sin(3x) + 1 / 4sin(12t)sin(6x)")
1
Faites la simulation suivante pour voir comment les sinus et les cosinus s’ajoutent pour produire des fonctions périodiques arbitraires.
Faites la simulation suivante de système masse-ressort pour étudier la relation entre les vecteurs vitesse et accélération, ainsi que leur relation avec le mouvement, à différents points de l’oscillation avec et sans amortissement et pour en apprendre plus sur les facteurs qui ont une incidence sur la période d’oscillation.
2
Hayt, W. H., Jr., Kemmerly, J. E. et Durbin, S. M. (2007). Engineering circuit analysis (7e éd.). McGraw-Hill Higher Education.
Meriam, J. L., Kraige, L. G. et Bolton, J. N. (2020). Engineering mechanics: Dynamics (8e éd.). John Wiley & Sons Ltd.
Nagle, R. K., Saff, E. B. et Snider, A. D. (2018). Fundamentals of differential equations (9e éd.). Pearson.
Rao, S. S. (2017). Mechanical vibrations (6e éd.). Pearson.
Trench, W. F. (2013). Elementary differential equations with boundary value problems. https://math.libretexts.org/Bookshelves/Differential_Equations/Elementary_Differential_Equations_with_Boundary_Value_Problems_(Trench)
 ,
,")

uu(30.25,oo)")
 y = q(x)")

y_1=0")
")
![y(x)=y_1(x)[int(q(x))/(y_1(x))dx+C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fb6cd40e2b2a9110d9c28b65e4d72851-2.png "y(x)=y_1(x)[int(q(x))/(y_1(x))dx+C]")
")
)")
![[int u(x)q(x)dx+C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6ae09153fc3eab62ff6da1e7ea140ae8-2.png "[int u(x)q(x)dx+C]")
y=0")
/y=-p(x)")
=-intp(x) dx")
dx)")
=e^(intp(x)dx)")
)uu(ln(3),oo)")

/(dt)=F_g")
/(dt)=-g")

![I(t)=e^(-Rt//L)[int e^(Rt//L) \ (E(t))/L dt +C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c9c2004d7046726022c4099db379bef9-2.png "I(t)=e^(-Rt//L)[int e^(Rt//L) \ (E(t))/L dt +C]")
y' + q(x)y = f(x)")
y' + q(x)y = 0")
,y_2(x_0)),(y_1'(x_0),y_2'(x_0))|=")
y'_2(x_0)-y'_1(x_0)y_2(x_0)")


")
")
")
=c_1cos(omega_0t)+c_2sin(omega_0t)")
=Rcos(omega_0t-phi)")

=e^(-c/(2m)t)(c_1cos(omega_1t)+c_2sin(omega_1t))")
=Re^(-c/(2m)t)cos(omega_1t-phi)")
=F_0/(2m omega_0)t sin(omega_0 t)+")
/dt+RI+1/Cq=E(t)")
=int_0^ooe^(-st)f(t)dt")
=(F(s)+a(y'(0)+sy(0))+b y(0) )/(p(s))")
=s^2+4")
=\mathcal{L}^-1{3sin(t)}")
")
=(3//(s^2+1)+(-1+s(1)))/(s^2+4)")
+s-1)/(s^2+4)")
")
=(s^3-s^2+s+2)/((s^2+1)(s^2+4))")
=1/(s^2+1)+(s-2)/(s^2+4)")
+s/(s^2+4)- 2/(s^2+4)")
\ harr\ b/(s^2+b^2)")
\ harr\ s/(s^2+b^2)")
+cos(2t)-sin(2t)")
g(t)}=e^(-as)\mathcal{L}{g(t+a)}")
=3t^2")

=3(t+1)^2")

}")





3t^2}=e^(-s)(6/s^3+6/s^2+3/s )")
=2t-1")
=4t")
= 2t-1+ u(t-2)(4t-2t+1)")
(2t+1)")
}=\mathcal{L}{2t-1}")
(2t+1) }")
=2t+1")
=2(t+2)+1")

\mathcal{L}{g(t+2)}")

 \mathcal{L}{2t+5 }")
(2/s^2+5/s)")
g(t-a)")

 G(s)")
}=e^(-as)")
=J_1(s)-J_3(s)")
J_1(s)+0,1sJ_3(s)=12/s),(-2J_1(s)+(0,1s+2)J_3(s)=0) :}")
y''+P_1(x)y'+P_2(x)y=0")
=somme_(n=0)^oo\ a_n(x-x_0)^n")

![|[a_11,a_12],[a_21,a_22]|=a_11a_22-a_21a_12](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/059bb8efcaa1352ddcb141d23f141548.png "|[a_11,a_12],[a_21,a_22]|=a_11a_22-a_21a_12")
![|[a_11,a_12,a_13],[a_21,a_22,a_23] ,[a_31,a_32,a_33] |=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d1d2577b861992088ee3fe65b7ef1eec.png "|[a_11,a_12,a_13],[a_21,a_22,a_23] ,[a_31,a_32,a_33] |=")
![a_11|[a_22,a_23],[a_32,a_33]|-](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/544a2b797fe7ffbd5ec378f9d7aa74c6.png "a_11|[a_22,a_23],[a_32,a_33]|-")
![a_12|[a_21,a_23],[a_31,a_33]|+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6f19b481453b02652e1ed57c1a6c09b8.png "a_12|[a_21,a_23],[a_31,a_33]|+")
![a_13|[a_21,a_22],[a_31,a_32]|](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/053e38ea50ac7f1572e2347f7f06def1.png "a_13|[a_21,a_22],[a_31,a_32]|")

![|[-5,-1],[3,2]|=(-5)(2)-(3)(-1)=-7](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2a47204968c0b6afa32c304d114d7357.png "|[-5,-1],[3,2]|=(-5)(2)-(3)(-1)=-7")
![|B|=|[2,4,7],[5,-3,8] ,[0,-1,3] |=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/88f3bc20d396330811bd6d46a116d0c9.png "|B|=|[2,4,7],[5,-3,8] ,[0,-1,3] |=")
![2|[-3,8],[-1,3]|-](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/79d712b0d3e15837647e4212743c9080.png "2|[-3,8],[-1,3]|-")
![4|[5,8],[0,3]|+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/027a886f0c149a2b807840a695185439.png "4|[5,8],[0,3]|+")
![7|[5,-3],[0,-1]|](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bde87f849885fb920e0102553729e0e3.png "7|[5,-3],[0,-1]|")
(3)-(-1)(8))-4((5)(3)-(0)(8))+")
(-1)-(0)(-3))")
-4(15)+7(-5)")

![A^-1=1/(det(A))[[a_22,-a_12],[-a_21,a_11]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/db2c539a1405333a0d7c3939a1452ec4.png "A^-1=1/(det(A))[[a_22,-a_12],[-a_21,a_11]]")

= A(t)bb(y) + bb(f)(t)")
'=Abb(y)")

 = c_1e^{\lambda_1 t} \mathbf{u}_1 + c_2 e^{\lambda_2 t} \mathbf{u}_2 + \ldots + c_n e^{\lambda_n t} \mathbf{u}_n")
=")
(bb"a"cos(betat)-bb"b"sin(beta t))+")
(bb"a"sin(betat)+bb"b"cos(beta t))")

=c_1e^{lambda t}bb{u} + c_2e^{lambda t} (tbb{u} +bb{v} )")
 = somme_{n = 1}^{infty} B_n singauche( frac{npi x}{L} droite) e^{-beta^2 gauche( frac{npi}{L} droite)^2 t}")
sin((npix) / L) dx")
 / (delt^2)(x,t) = alpha^2(del^2u) / (delx^2)(x,t) \ ,")

![u(x,t) = somme_(n = 1)^oo[A_n cos((npialphat) / L) + (B_nL) / (npialpha)sin((npialphat) / L )]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8546d96f1d4f63ab70c10f4412a15fc8.png "u(x,t) = somme_(n = 1)^oo[A_n cos((npialphat) / L) + (B_nL) / (npialpha)sin((npialphat) / L )]")
 / L)")