Key Terms
Cramer’s rule
An explicit formula for the solution of a system of linear equations with as many equations as unknowns, valid whenever the system has a unique solution.
linear circuit
An electronic circuit in which, for a sinusoidal input voltage of frequency  any steady-state output of the circuit (the current through any component, or the voltage between any two points) is also sinusoidal with frequency
any steady-state output of the circuit (the current through any component, or the voltage between any two points) is also sinusoidal with frequency 
load resistor
An electrical component or portion of a circuit that consumes electric power. Normally, the term “load” is used to refer specifically to the active component for which power consumption is mainly intended, as opposed to internal resistance or resistors used in conjunction with capacitors or inductors for timing.
maximum power transfer theorem
Maximum power is transferred to a load when the internal resistance equals the load resistance; for a Thévenin-equivalent circuit, this is true when the load resistance equals the Thévenin resistance.
mesh analysis
A method that is used to solve planar circuits for the currents (and indirectly the voltages) at any place in an electrical circuit.
mesh current
The currents defined in mesh analysis as flowing around each loop of a planar circuit. The actual current through each branch of the circuit is found as a combination of the mesh currents in that branch.
planar circuit (mesh)
An electrical circuit that can be drawn on a plane surface with no wires crossing each other.
superposition theorem
The response (voltage or current) in any branch of a linear circuit having more than one independent source equals the algebraic sum of the responses caused by each independent source acting alone, where all the other independent sources are replaced by short circuits.
Thévenin-equivalent circuit
A simple circuit, equivalent to any more complex linear circuit, involving the Thévenin voltage and Thévenin resistance relative to a particular load. In the Thévenin-equivalent circuit, the Thévenin voltage and resistance are connected in series with the load.
Thévenin resistance
One component of a linear circuit’s Thévenin-equivalent, found by removing the load resistor from the original circuit and calculating the total equivalent resistance between the two load connection points.
Thévenin’s theorem
An electrical circuit theorem through which any complex linear circuit may be replaced by its Thévenin-equivalent with respect to a given load.
Thévenin voltage
One component of a linear circuit’s Thévenin-equivalent, found by removing the load resistor from the original circuit and calculating the potential difference from one load connection point to the other.
Key Equations
| Cramer’s rule |  |
| Current through a load resistor |  |
| Voltage across a load resistor |  |
| Power dissipated in a load resistor |  |
Summary
7.1 Mesh Analysis
7.2 Superposition Theorem
- Linear circuits can be analysed by calculating contributions to current for each voltage source independently
- Steps in superposition method:
- Replace all potential sources but one with a short circuit; find the voltage/current through each branch of the network.
- Repeat for each potential source.
- Add up all the separate voltages/currents in each branch.
7.3 Thévenin’s Theorem
- Any linear circuit containing several voltage sources and resistors can be simplified to an equivalent circuit with a single voltage source and resistance connected in series with a load. Specifically, the three components connected in series are:
- Load resistor,
 ;
; - Thévenin voltage
 , found by removing from the original circuit and calculating the potential difference from one load connection point to the other;
, found by removing from the original circuit and calculating the potential difference from one load connection point to the other; - Thévenin resistance
 , found by removing from the original circuit and calculating the total equivalent resistance between the two load connection points.
, found by removing from the original circuit and calculating the total equivalent resistance between the two load connection points.
- Once the Thévenin voltage and resistance are determined, the Thévenin-equivalent circuit is redrawn with the Thévenin voltage attached to the Thévenin resistance in series, and any load resistance attached between the two connection points
- Maximum power transfer theorem: maximum power is transferred to a load when the internal resistance equals the load resistance; for a Thévenin-equivalent circuit, this is true when the load resistance equals the Thévenin resistance
Answers to Check Your Understanding
7.1 a.
![\[\mathbf{V}=\left(\begin{array}{c}-V_1\\V_1-V_2\\V_3\end{array}\right),~~~\mathbf{R}=\left(\begin{array}{ccc}-(R_1+R_2+R_3)&R_3&0\\R_3&-(R_3+R_5)&R_5\\0&R_5&-(R_4+R_5)\end{array}\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2f881a811ee5402d4708d06c1ac92dda_l3.svg "Rendered by QuickLaTeX.com")
b.
![\[\mathbf{V}=\left(\begin{array}{c}V_1-V_2\\V_2\\-V_3\end{array}\right),~~~\mathbf{R}=\left(\begin{array}{ccc}-(R_1+R_4)&0&R_4\\0&-(R_2+R_3)&0\\R_4&0&-(R_4+R_5+R_6)\end{array}\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4fa6b1daf1ad899ab1ca4ad9f78a3d3d_l3.svg "Rendered by QuickLaTeX.com")
c.
![\[\mathbf{V}=\left(\begin{array}{c}-V\\0\\0\end{array}\right),~~~\mathbf{R}=\left(\begin{array}{ccc}-(R_1+R_4)&R_1&R_4\\R_1&-(R_1+R_2+R_3)&R_3\\R_4&R_3&-(R_3+R_4+R_5)\end{array}\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a220d95df06bb084c42e0cc8fb011fe5_l3.svg "Rendered by QuickLaTeX.com")
7.2 Replacing the  source with a short means current from the
source with a short means current from the  source passes through the short. With the source replaced with a short, the current through the
source passes through the short. With the source replaced with a short, the current through the  resistor due to the source is
resistor due to the source is
![\[I_{7\Omega}=\frac{6.00~\mathrm{V}}{7.00~\Omega}=\frac{6.00}{7.00}~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2d1113369963e8a3beb40643f4a5ec99_l3.svg "Rendered by QuickLaTeX.com")
Therefore, the current through the resistor is  and the power dissipated is
and the power dissipated is  In fact, since the
In fact, since the  -resistor is connected directly to the terminals of the source, the current is
-resistor is connected directly to the terminals of the source, the current is  regardless of the value of the battery.
regardless of the value of the battery.
7.3.  ,
,  .
.
Conceptual Questions
7.1 Mesh Analysis
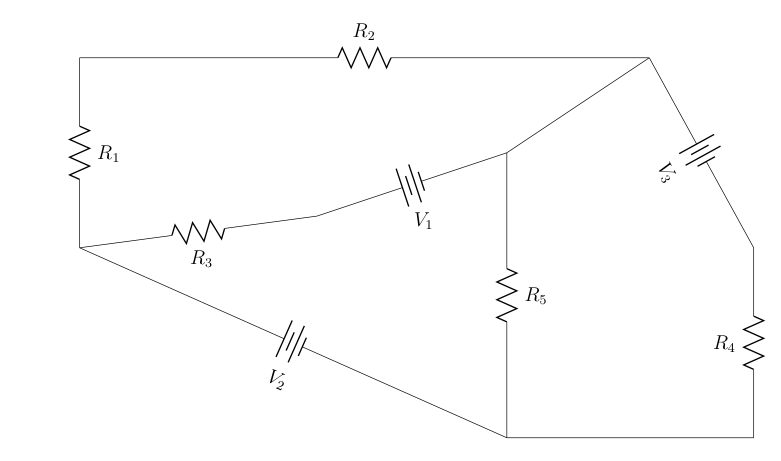
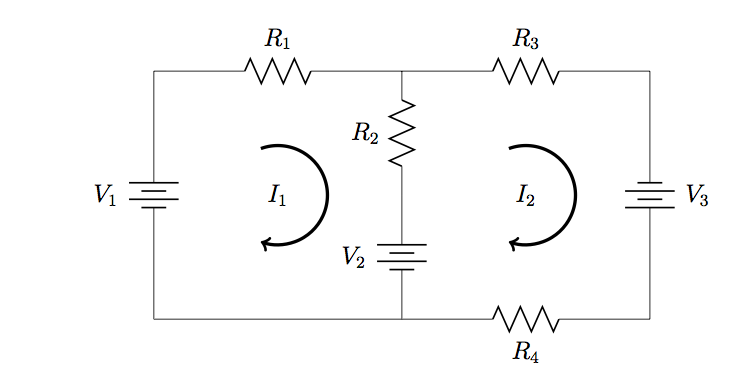
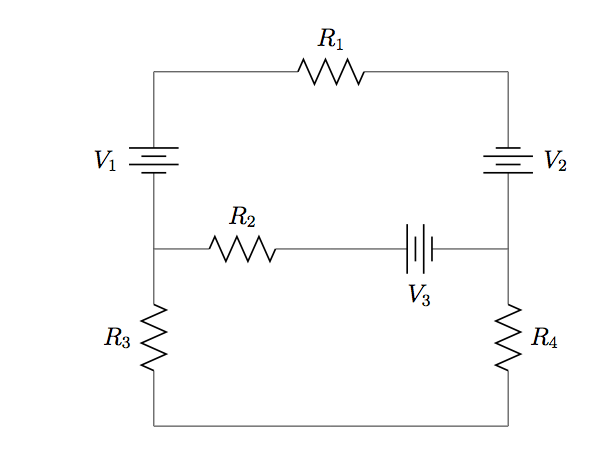
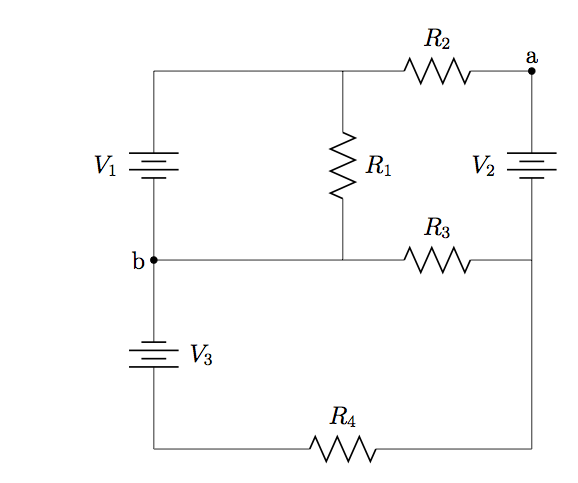
1 Sally and Frank are asked to find the  and
and  matrices for the circuit below. They both follow the procedure for reading off matrix elements described in Mesh Analysis. When comparing results, they find that they have the same elements in the first rows of both and , but the elements in the second and third rows of their matrices are swapped. How did this happen? Did one of them make an error? If given values for the voltages and resistances, should they expect to find the same currents through each component? Explain.
matrices for the circuit below. They both follow the procedure for reading off matrix elements described in Mesh Analysis. When comparing results, they find that they have the same elements in the first rows of both and , but the elements in the second and third rows of their matrices are swapped. How did this happen? Did one of them make an error? If given values for the voltages and resistances, should they expect to find the same currents through each component? Explain.
7.2 Superposition Theorem
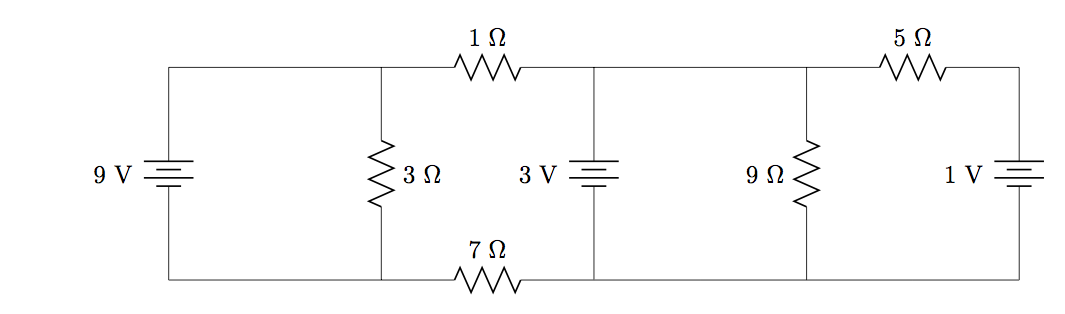
2. How much power is used by the  -resistor in the circuit below? How much power is used by the
-resistor in the circuit below? How much power is used by the  -resistor? Explain why the answers are obvious, with no need to do any work. (Hint: this problem is best approached using superposition method).
-resistor? Explain why the answers are obvious, with no need to do any work. (Hint: this problem is best approached using superposition method).
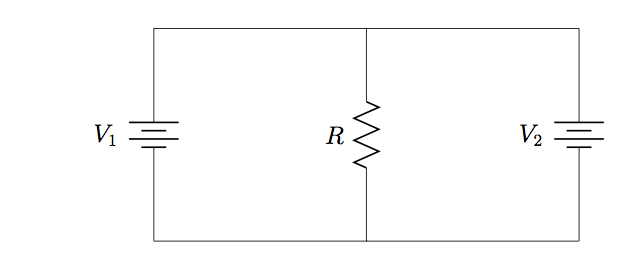
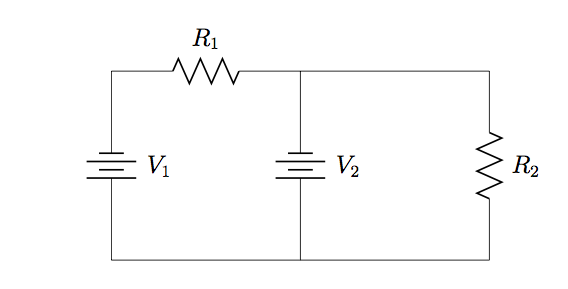
3. (a) Use superposition theorem to determine the potential difference across the resistor in the circuit below. (b) Explain why mesh analysis is a bad approach to use for this problem (e.g. you could demonstrate this by applying the mesh strategy and Cramer’s rule to calculate mesh currents and interpret the result).
7.3 Thévenin’s Theorem
4. Efficiency. The efficiency of a circuit is defined as the ratio between the power used by a load and the total power used. (a) Show that the general expression for efficiency can be written as
![\[\eta=\frac{R_L}{R_{\mathrm{th}}+R_L}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3c136b49bd1cf5c2e036bf653216306a_l3.svg "Rendered by QuickLaTeX.com")
For any given and , show that: (b) the condition for minimum efficiency ( ) corresponds to maximum current, but the voltage across and power dissipated at the load are both small; (c) the condition for maximum efficiency () corresponds to maximum voltage across the load, but current through and power dissipated at the load are both small; (d) the condition of maximum power transfer (
) corresponds to maximum current, but the voltage across and power dissipated at the load are both small; (c) the condition for maximum efficiency () corresponds to maximum voltage across the load, but current through and power dissipated at the load are both small; (d) the condition of maximum power transfer ( ), while only moderately efficient, corresponds to both moderate voltage across and moderate current through the load. (Hint: You may find it useful to refer to Equations 7.3.1-7.3.3).
), while only moderately efficient, corresponds to both moderate voltage across and moderate current through the load. (Hint: You may find it useful to refer to Equations 7.3.1-7.3.3).
Problems
7.1 Mesh Analysis
5. Apply Cramer’s rule to find expressions for  and
and  in terms of the given resistances and voltages.
in terms of the given resistances and voltages.
6. Refer to the circuit in Problem 5, with  ,
,  ,
,  ,
,  , and
, and  . Apply Cramer’s rule to calculate the values of and .
. Apply Cramer’s rule to calculate the values of and .
7. Apply Cramer’s rule to find expressions for and in terms of the given resistances and voltages.
8. Refer to the circuit in Problem 7, with , ,  ,
,  ,
,  ,
,  , and
, and  . Apply Cramer’s rule to calculate the values of and .
. Apply Cramer’s rule to calculate the values of and .
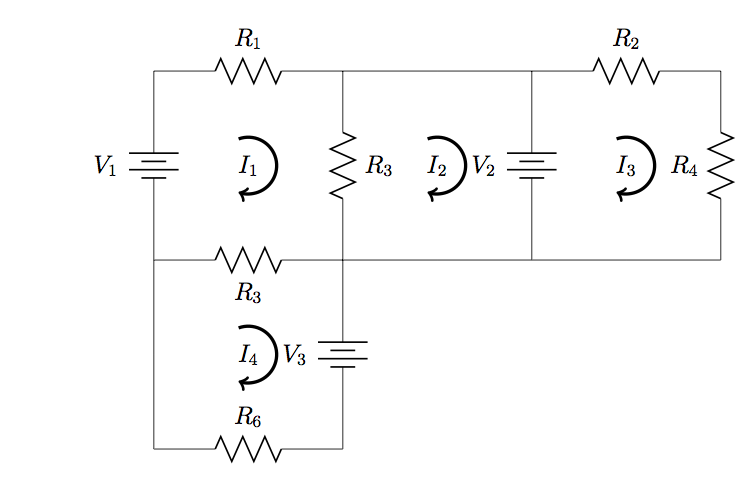
9. Apply Cramer’s rule to find expressions for , , and  in terms of the given resistances and voltages.
in terms of the given resistances and voltages.
10. Refer to the circuit in Problem 9, with , , , , ,  ,
,  , and
, and  . Apply Cramer’s rule to calculate the values of , , and .
. Apply Cramer’s rule to calculate the values of , , and .
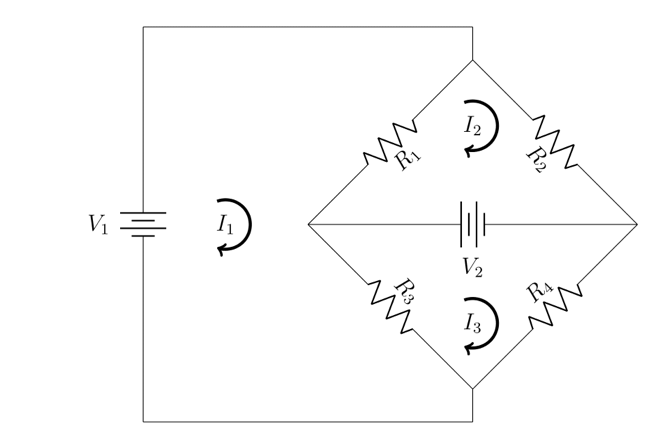
11. Apply Cramer’s rule to find expressions for , , and in terms of the given resistances and voltages.
12. Refer to the circuit in Problem 11, with , , , , , and . Apply Cramer’s rule to calculate the values of , , and .
13. Find expressions for the total power supplied by all voltage sources and the total power dissipated at all resistors, and confirm that these are equal.
14. Refer to the circuit in Problem 13, with , , , , and . Calculate the total power supplied by all voltage sources and the total power dissipated at all resistors, and confirm that the two values are equal.
15. Find expressions for the total power supplied by all voltage sources and the total power dissipated at all resistors, and confirm that these are equal.
16. Refer to the circuit in Problem 15, with , ,  , , , , and . Calculate the total power supplied by all voltage sources and the total power dissipated at all resistors, and confirm that the two values are equal.
, , , , and . Calculate the total power supplied by all voltage sources and the total power dissipated at all resistors, and confirm that the two values are equal.
17. Find expressions for the total power supplied by all voltage sources and the total power dissipated at all resistors, and confirm that these are equal.
18. Refer to the circuit in Problem 17, with , , , , , , and . Calculate the total power supplied by all voltage sources and the total power dissipated at all resistors, and confirm that the two values are equal.
19. Find expressions for the total power supplied by all voltage sources and the total power dissipated at all resistors, and confirm that these are equal.
20. Refer to the circuit in Problem 19, with , , , , , , and . Calculate the total power supplied by all voltage sources and the total power dissipated at all resistors, and confirm that the two values are equal.
21. Find expressions for the current through and power dissipated at  in terms of the given resistances and voltages.
in terms of the given resistances and voltages.
22. Refer to the circuit in Problem 21. Calculate (a) the mesh current values and (b) the power supplied by each voltage source, when , , , , , , , and  .
.
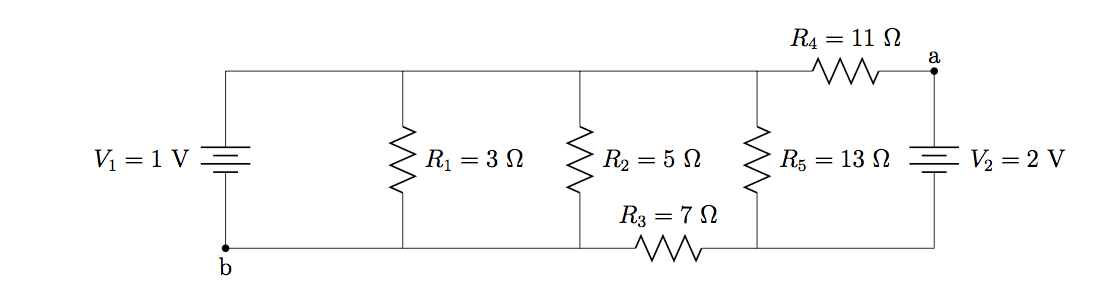
23. Find the potential difference  between points
between points  and
and  in the following circuit diagram.
in the following circuit diagram.
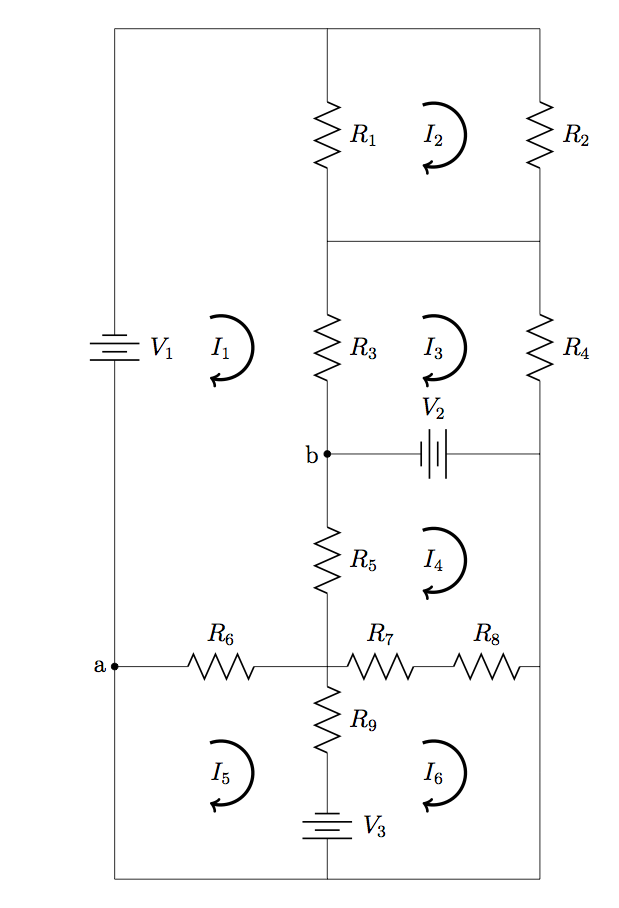
24. (a) Use a computer to calculate the mesh currents  in the following circuit diagram, when , , , , , , , ,
in the following circuit diagram, when , , , , , , , ,  ,
,  ,
,  , and
, and  . (b) Calculate the potential difference across and
. (b) Calculate the potential difference across and  , confirming that
, confirming that  .
.
7.2 Superposition Theorem
25. Use superposition method to find an expression for the current through and power dissipated by  in the circuit below.
in the circuit below.
26. Use superposition method to calculate the current through and power dissipated by in the circuit from problem 25, when , , , and .
27. Use superposition method to find expressions for (a) the currents through each resistor in the circuit below, and (b) the potential difference between points and .
28. Refer to the circuit in problem 27, with , , , , and . Use superposition method to calculate (a) the current through each resistor, and (b) the potential difference between points and .
29. Use superposition method to find an expression for the current through and power dissipated by  in the circuit below.
in the circuit below.
30. Use superposition method to determine the current through and power dissipated by in the circuit from problem 29, when , , , , , , and .
31. Use superposition method to find expressions for (a) the current through each resistor in the circuit from Problem 29, and (b) the potential difference between points and .
32. Refer to the circuit in problem 29, with, , , , , , and . Use superposition method to calculate (a) the current through each resistor, and (b) the potential difference between points and .
7.3 Thévenin’s Theorem
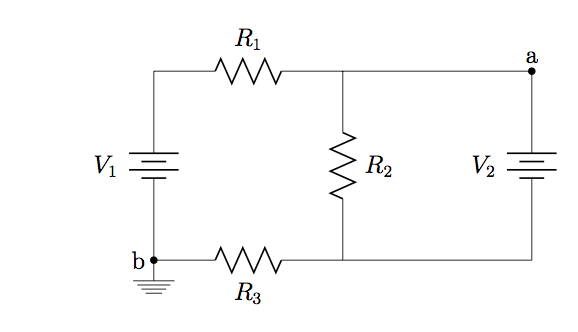
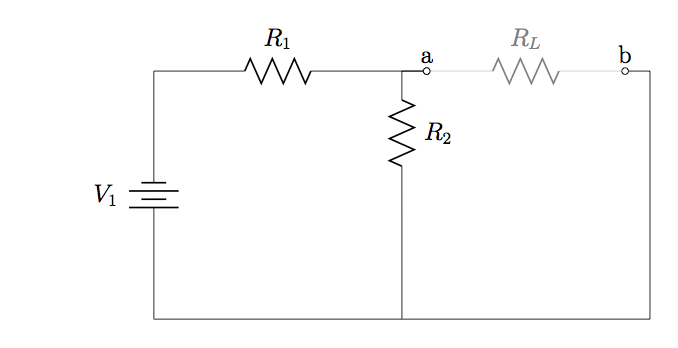
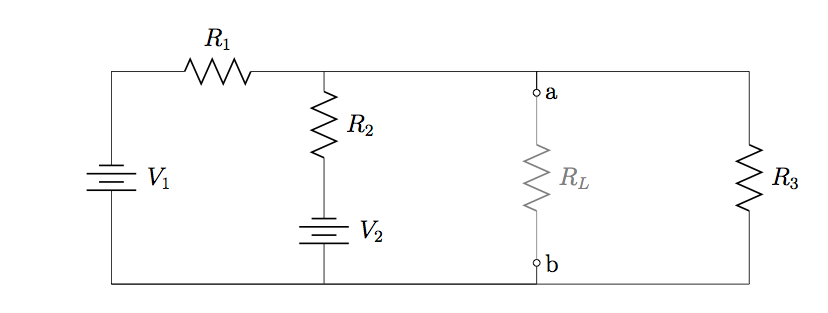
33. Find expressions for and with respect to in the circuit diagram below.
34. Refer to the circuit diagram in Problem 33, with ,  , and
, and  . Calculate (a) and with respect to , and (b) the maximum amount of power that can be used by .
. Calculate (a) and with respect to , and (b) the maximum amount of power that can be used by .
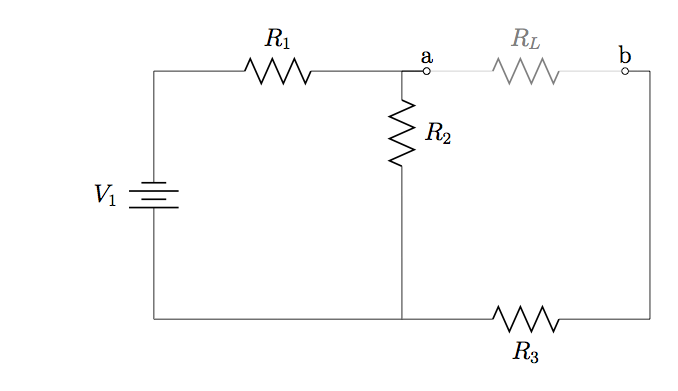
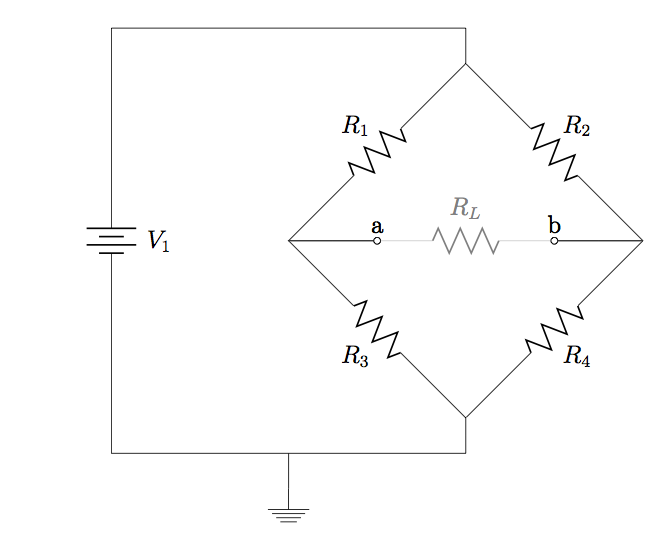
35. Find expressions for and with respect to in the circuit diagram below.
36. Refer to the circuit diagram in Problem 35, with , , , and  . Calculate (a) and with respect to , and (b) the maximum amount of power that can be used by .
. Calculate (a) and with respect to , and (b) the maximum amount of power that can be used by .
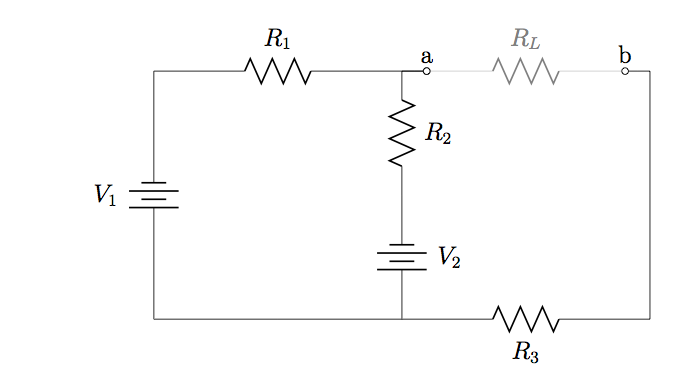
37. Find expressions for and with respect to in the circuit diagram below.
38. Refer to the circuit diagram in Problem 37, with , , , , and . Calculate (a) and with respect to , and (b) the maximum amount of power that can be used by .
39. Find expressions for and with respect to in the circuit diagram below.
40. Refer to the circuit diagram in Problem 39, with , , , , and . Calculate (a) and with respect to , and (b) the maximum amount of power that can be used by .
41. Find expressions for and with respect to in the circuit diagram below.
42. Refer to the circuit diagram in Problem 41, with , , , and , and  . Calculate (a) and with respect to , and (b) the maximum amount of power that can be used by .
. Calculate (a) and with respect to , and (b) the maximum amount of power that can be used by .
Additional Problems
43. Find the current through, and the power dissipated by  in the circuit below using (a) mesh analysis method and (b) superposition method.
in the circuit below using (a) mesh analysis method and (b) superposition method.
44. Find the current through  and
and  in the circuit below using (a) mesh analysis method and (b) superposition method.
in the circuit below using (a) mesh analysis method and (b) superposition method.












 . No free particle can have less charge than this, and, therefore, the charge on any object—the charge on all objects—must be an integer multiple of this amount. All macroscopic, charged objects have charge because electrons have either been added or taken away from them, resulting in a net charge.
. No free particle can have less charge than this, and, therefore, the charge on any object—the charge on all objects—must be an integer multiple of this amount. All macroscopic, charged objects have charge because electrons have either been added or taken away from them, resulting in a net charge. , and the smallest possible negative charge is
, and the smallest possible negative charge is  ; these values are exactly equal. This is simply how the laws of physics in our universe turned out.
; these values are exactly equal. This is simply how the laws of physics in our universe turned out. of the mass. In addition, he showed that the negatively charged electrons perpetually orbited about this nucleus, forming a sort of electrically charged cloud that surrounds the nucleus (
of the mass. In addition, he showed that the negatively charged electrons perpetually orbited about this nucleus, forming a sort of electrically charged cloud that surrounds the nucleus (




 –
– charge.” Similarly, we often say something like, “Six charges are located at the vertices of a regular hexagon.” A charge is not a particle; rather, it is a property of a particle. Nevertheless, this terminology is extremely common (and is frequently used in this book, as it is everywhere else). So, keep in the back of your mind what we really mean when we refer to a “charge.
charge.” Similarly, we often say something like, “Six charges are located at the vertices of a regular hexagon.” A charge is not a particle; rather, it is a property of a particle. Nevertheless, this terminology is extremely common (and is frequently used in this book, as it is everywhere else). So, keep in the back of your mind what we really mean when we refer to a “charge.









 the net electric charges of the two objects;
the net electric charges of the two objects; the vector displacement from
the vector displacement from  to
to  .
. on one of the charges is proportional to the magnitude of its own charge and the magnitude of the other charge, and is inversely proportional to the square of the distance between them:
on one of the charges is proportional to the magnitude of its own charge and the magnitude of the other charge, and is inversely proportional to the square of the distance between them:![\[F\propto\frac{q_1q_2}{{r_{12}}^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2b4beb4ccb337afbc6e9457f1fa7abef_l3.svg "Rendered by QuickLaTeX.com")

 because one of the charges may be negative, but the magnitude of the force is always positive. The unit vector
because one of the charges may be negative, but the magnitude of the force is always positive. The unit vector 


 is given by Coulomb’s law. Note that Newton’s third law (every force exerted creates an equal and opposite force) applies as usual—the force on
is given by Coulomb’s law. Note that Newton’s third law (every force exerted creates an equal and opposite force) applies as usual—the force on  changes, and therefore so does the force. An immediate consequence of this is that direct application of Newton’s laws with this force can be mathematically difficult, depending on the specific problem at hand. It can (usually) be done, but we almost always look for easier methods of calculating whatever physical quantity we are interested in. (Conservation of energy is the most common choice.)
changes, and therefore so does the force. An immediate consequence of this is that direct application of Newton’s laws with this force can be mathematically difficult, depending on the specific problem at hand. It can (usually) be done, but we almost always look for easier methods of calculating whatever physical quantity we are interested in. (Conservation of energy is the most common choice.) in Coulomb’s law is called the permittivity of free space, or (better) the permittivity of vacuum. It has a very important physical meaning that we will discuss in a later chapter; for now, it is simply an empirical proportionality constant. Its numerical value (to three significant figures) turns out to be
in Coulomb’s law is called the permittivity of free space, or (better) the permittivity of vacuum. It has a very important physical meaning that we will discuss in a later chapter; for now, it is simply an empirical proportionality constant. Its numerical value (to three significant figures) turns out to be![\[\varepsilon_0=8.85\times10^{-12}~\frac{\mathrm{C}^2}{\mathrm{N}\cdot\mathrm{m}^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6ce2f990a121aeb8b8b73a11862a58c8_l3.svg "Rendered by QuickLaTeX.com")
![\[k_e=\frac{1}{4\pi\varepsilon_0}=8.99\times10^9~\frac{\mathrm{N}\cdot\mathrm{m}^2}{\mathrm{C}^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ee7690795658e8d2eedaa8e2f3bf3ea2_l3.svg "Rendered by QuickLaTeX.com")
 and the electron has
and the electron has  . In the “ground state” of the atom, the electron orbits the proton at most probable distance of
. In the “ground state” of the atom, the electron orbits the proton at most probable distance of  (
(

![\[q_1=+e=+1.602\times10^{-19}~\mathrm{C}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8c1d092badcdfc1476ed2f5d72ca1a28_l3.svg "Rendered by QuickLaTeX.com")
![\[q_2=-e=-1.602\times10^{-19}~\mathrm{C}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-de80e35ef310330654c7f0ece2d87bb8_l3.svg "Rendered by QuickLaTeX.com")
![\[r=5.29\times10^{-11}~m.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9ba2c458b0becab224d16856c49f0ad6_l3.svg "Rendered by QuickLaTeX.com")
![\[F=\frac{1}{4\pi\varepsilon_0}\frac{|e|^2}{r^2}=\frac{1}{4\pi\left(8.85\times10^{-12}~\frac{\mathrm{C}^2}{\mathrm{N}\cdot\mathrm{m}^2}\right)}\frac{\left(1.602\times10^{-19}~\mathrm{C}\right)^2}{\left(5.29\times10^{-11}~m\right)^2}=8.25\times10^{-8}~\mathrm{N}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-25f98c954b625a79d76dbcf8d122691d_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{F}}=(8.25\times10^{-8}~\mathrm{N})~\mathbf{\hat{r}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-323ba487e5ab435e05b1fac9ae0e42c3_l3.svg "Rendered by QuickLaTeX.com")
 charges (which we refer to as source charge), what is the net electric force that they exert on some other point charge (which we call the test charge)? Note that we use these terms because we can think of the test charge being used to test the strength of the force provided by the source charges.
charges (which we refer to as source charge), what is the net electric force that they exert on some other point charge (which we call the test charge)? Note that we use these terms because we can think of the test charge being used to test the strength of the force provided by the source charges. by calculating the force on it from each source charge, taken one at a time, and then adding all those forces together (as vectors). This ability to simply add up individual forces in this way is referred to as the principle of superposition, and is one of the more important features of the electric force. In mathematical form, this becomes
by calculating the force on it from each source charge, taken one at a time, and then adding all those forces together (as vectors). This ability to simply add up individual forces in this way is referred to as the principle of superposition, and is one of the more important features of the electric force. In mathematical form, this becomes

 are the displacements from the position of the
are the displacements from the position of the  th charge to the position of
th charge to the position of  the difference in labels is merely to allow clear discussion, with
the difference in labels is merely to allow clear discussion, with 

 does not necessarily point in the same direction as the unit vector
does not necessarily point in the same direction as the unit vector  ; it may point in the opposite direction,
; it may point in the opposite direction,  . The signs of the source charge and test charge determine the direction of the force on the test charge.)
. The signs of the source charge and test charge determine the direction of the force on the test charge.) are fixed in place;
are fixed in place;  ,
,  , and
, and  , and that
, and that  what is the net force on the middle charge
what is the net force on the middle charge 

 and
and  ), and we are asked to find a force. This calls for Coulomb’s law and superposition of forces. There are two forces:
), and we are asked to find a force. This calls for Coulomb’s law and superposition of forces. There are two forces:![\[\vec{\mathbf{F}}=\vec{\mathbf{F}}_{21}+\vec{\mathbf{F}}_{23}=\frac{1}{4\pi\epsilon_0}\left[\frac{q_2q_1}{r_{21}^2}\hat{\mathbf{j}}+\left(-\frac{q_2q_3}{r_{23}^2}\hat{\mathbf{i}}\right)\right].\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5a792b0eee1c6394dc9a0962e664053b_l3.svg "Rendered by QuickLaTeX.com")

 -direction, while
-direction, while  points only in the
points only in the  -direction. The net force is obtained from applying the Pythagorean theorem to its
-direction. The net force is obtained from applying the Pythagorean theorem to its  and
and  -components:
-components:![\[F=\sqrt{F_x^2+F_y^2}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0abd6a0442e06d3669dc3a111627308c_l3.svg "Rendered by QuickLaTeX.com")


![\[F=\sqrt{F_x^2+F_y^2}=4.08\times10^{-14}~\mathrm{N}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c78163d04174d4b67bfd772bbc30d099_l3.svg "Rendered by QuickLaTeX.com")
![\[\phi=\tan^{-1}\left(\frac{F_y}{F_x}\right)=\tan^{-1}\left(\frac{3.46\times10^{-14}~\mathrm{N}}{-2.16\times10^{-14}~\mathrm{N}}\right)=-58^{\circ},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f660e8a0cfae9e952627df1f5fc2e7bc_l3.svg "Rendered by QuickLaTeX.com")
 above the
above the  Recall that negative signs on vector quantities indicate a reversal of direction of the vector in question. But for electric forces, the direction of the force is determined by the types (signs) of both interacting charges; we determine the force directions by considering whether the signs of the two charges are the same or are opposite. If you also include negative signs from negative charges when you substitute numbers, you run the risk of mathematically reversing the direction of the force you are calculating. Thus, the safest thing to do is to calculate just the magnitude of the force, using the absolute values of the charges, and determine the directions physically.
Recall that negative signs on vector quantities indicate a reversal of direction of the vector in question. But for electric forces, the direction of the force is determined by the types (signs) of both interacting charges; we determine the force directions by considering whether the signs of the two charges are the same or are opposite. If you also include negative signs from negative charges when you substitute numbers, you run the risk of mathematically reversing the direction of the force you are calculating. Thus, the safest thing to do is to calculate just the magnitude of the force, using the absolute values of the charges, and determine the directions physically. located at positions
located at positions  , applying
, applying ![\begin{eqnarray*}\vec{\mathbf{F}}&=&\vec{\mathbf{F}}_1+\vec{\mathbf{F}}_2+\vec{\mathbf{F}}_3+\ldots+\vec{\mathbf{F}}_N\\&=&\frac{1}{4\pi\epsilon_0}\left(\frac{Qq_1}{r_1^2}\hat{\mathbf{r}}_1+\frac{Qq_2}{r_2^2}\hat{\mathbf{r}}_2+\frac{Qq_3}{r_3^2}\hat{\mathbf{r}}_3+\ldots+\frac{Qq_N}{r_N^2}\hat{\mathbf{r}}_N\right)\\&=&Q\left[\frac{1}{4\pi\epsilon_0}\left(\frac{q_1}{r_1^2}\hat{\mathbf{r}}_1+\frac{q_2}{r_2^2}\hat{\mathbf{r}}_2+\frac{q_3}{r_3^2}\hat{\mathbf{r}}_3+\ldots+\frac{q_N}{r_N^2}\hat{\mathbf{r}}_N\right)\right].\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cb13c7afb99f2cc28ccd03e57ca8a7a5_l3.svg "Rendered by QuickLaTeX.com")

![\[\vec{\mathbf{E}}\equiv\frac{1}{4\pi\epsilon_0}\left(\frac{q_1}{r_1^2}\hat{\mathbf{r}}_1+\frac{q_2}{r_2^2}\hat{\mathbf{r}}_2+\frac{q_3}{r_3^2}\hat{\mathbf{r}}_3+\ldots+\frac{q_N}{r_N^2}\hat{\mathbf{r}}_N\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-37d62d529bd7c8aaf396ca1004359a1e_l3.svg "Rendered by QuickLaTeX.com")

 of the
of the  is the location of the point in space where you are calculating the field and is relative to the positions
is the location of the point in space where you are calculating the field and is relative to the positions  of the source charges (
of the source charges (
 of a point charge is similar to the gravitational field
of a point charge is similar to the gravitational field  of Earth; once we have calculated the gravitational field at some point in space, we can use it any time we want to calculate the resulting force on any mass we choose to place at that point. In fact, this is exactly what we do when we say the gravitational field of Earth (near Earth’s surface) has a value of
of Earth; once we have calculated the gravitational field at some point in space, we can use it any time we want to calculate the resulting force on any mass we choose to place at that point. In fact, this is exactly what we do when we say the gravitational field of Earth (near Earth’s surface) has a value of  , and then we calculate the resulting force (i.e., weight) on different masses. Also, the general expression for calculating
, and then we calculate the resulting force (i.e., weight) on different masses. Also, the general expression for calculating  , where
, where  is a proportionality constant, playing the same role for
is a proportionality constant, playing the same role for  does for
does for , the units of
, the units of  are newtons per coulomb,
are newtons per coulomb,  , that is, the electric field applies a force on each unit charge. Now notice the units of
, that is, the electric field applies a force on each unit charge. Now notice the units of  : From
: From  , the units of
, the units of  , that is, the gravitational field applies a force on each unit mass. We could say that the gravitational field of Earth, near Earth’s surface, has a value of
, that is, the gravitational field applies a force on each unit mass. We could say that the gravitational field of Earth, near Earth’s surface, has a value of  .
. in all directions. The field exists at every physical point in space. To put it another way, the electric charge on an object alters the space around the charged object in such a way that all other electrically charged objects in space experience an electric force as a result of being in that field. The electric field, then, is the mechanism by which the electric properties of the source charge are transmitted to and through the rest of the universe. (Again, the range of the electric force is infinite.)
in all directions. The field exists at every physical point in space. To put it another way, the electric charge on an object alters the space around the charged object in such a way that all other electrically charged objects in space experience an electric force as a result of being in that field. The electric field, then, is the mechanism by which the electric properties of the source charge are transmitted to and through the rest of the universe. (Again, the range of the electric force is infinite.) . What is the electric field due to the nucleus at the location of the electron?
. What is the electric field due to the nucleus at the location of the electron? (
(
![\[\vec{\mathbf{E}}=\frac{1}{4\pi\epsilon_0}\sum_{i=1}^{N}\frac{q_i}{r_i^2}\hat{\mathbf{r}}_i.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bf95d21f43552854b7d22b8597a93455_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{E}}=\frac{1}{4\pi\epsilon_0}\frac{q}{r^2}\hat{\mathbf{r}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-202e6fa1d38abd1b96ed9f4d1985e98b_l3.svg "Rendered by QuickLaTeX.com")
 (since there are two protons) and
(since there are two protons) and ![\[\vec{\mathbf{E}}=\frac{1}{4\pi\left(8.85\times10^{-12}~\frac{\mathrm{C}^2}{\mathrm{N}\cdot\mathrm{m}^2}\right)}\frac{2\left(1.6\times10^{-19}~\mathrm{C}\right)}{\left(26.5\times10^{-12}~\mathrm{m}\right)^2}\hat{\mathbf{r}}=4.1\times10^{12}~\frac{\mathrm{N}}{\mathrm{C}}\hat{\mathbf{r}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-624c60a826347076e47febeb1a3ffa3b_l3.svg "Rendered by QuickLaTeX.com")
 above the midpoint between two equal charges
above the midpoint between two equal charges  that are a distance
that are a distance  apart (
apart ( .
. instead of
instead of 
 , and constants
, and constants 
 )-components of
)-components of ![\[E_x=\frac{1}{4\pi\epsilon_0}\frac{q}{r^2}\sin\theta-\frac{1}{4\pi\epsilon_0}\frac{q}{r^2}\sin\theta=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d3bfcc8dc2c624611a813434fefaf7c5_l3.svg "Rendered by QuickLaTeX.com")

![\[E_z=\frac{1}{4\pi\epsilon_0}\frac{q}{r^2}\cos\theta+\frac{1}{4\pi\epsilon_0}\frac{q}{r^2}\cos\theta=\frac{1}{4\pi\epsilon_0}\frac{2q}{r^2}\cos\theta.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8b0c04b2019ec142bbea580c83fc7ffd_l3.svg "Rendered by QuickLaTeX.com")
 -direction. Notice that this calculation uses the principle of
-direction. Notice that this calculation uses the principle of 
![\[r^2=z^2+\left(\frac{d}{2}\right)^2\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e23d3a36c6bec146d8fbdca63ed7ca97_l3.svg "Rendered by QuickLaTeX.com")
![\[\cos\theta=\frac{z}{r}=\frac{z}{\left[z^2+\left(\frac{d}{2}\right)^2\right]^{1/2}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ba72c700f72ecc1554ae1a9e2ec98050_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{E}}(z)=\frac{1}{4\pi\epsilon_0}\frac{2q}{\left[z^2+\left(\frac{d}{2}\right)^2\right]}\frac{z}{\left[z^2+\left(\frac{d}{2}\right)^2\right]^{1/2}}\hat{\mathbf{k}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-11de97fabe841550fbcb0745abff8e63_l3.svg "Rendered by QuickLaTeX.com")
![\begin{equation*}\vec{\mathbf{E}}(z)=\frac{1}{4\pi\epsilon_0}\frac{2qz}{\left[z^2+\left(\frac{d}{2}\right)^2\right]^{3/2}}\hat{\mathbf{k}}.\end{equation*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-61fc2418625181f26ddd455a42fe69bd_l3.svg "Rendered by QuickLaTeX.com")
![\[E_z=\frac{1}{4\pi\epsilon_0}\frac{q}{r^2}\cos\theta-\frac{1}{4\pi\epsilon_0}\frac{q}{r^2}\cos\theta=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-49ce8bc16d54f9be7076584ba2e7aeaa_l3.svg "Rendered by QuickLaTeX.com")
![\begin{eqnarray*}\vec{\mathbf{E}}(z)&=&\frac{1}{4\pi\epsilon_0}\frac{q}{r^2}\sin\theta\hat{\mathbf{i}}-\frac{1}{4\pi\epsilon_0}\frac{-q}{r^2}\sin\theta\hat{\mathbf{i}}\\&=&\frac{1}{4\pi\epsilon_0}\frac{2q}{r^2}\sin\theta\hat{\mathbf{i}}\\&=&\frac{1}{4\pi\epsilon_0}\frac{2q}{\left[z^2+\left(\frac{d}{2}\right)^2\right]}\frac{\left(\frac{d}{2}\right)}{\left[z^2+\left(\frac{d}{2}\right)^2\right]^{1/2}}\hat{\mathbf{i}}.\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c7cf64396d1ebc477769f90a570fc469_l3.svg "Rendered by QuickLaTeX.com")
![\begin{equation*}\vec{\mathbf{E}}(z)=\frac{1}{4\pi\epsilon_0}\frac{qd}{\left[z^2+\left(\frac{d}{2}\right)^2\right]^{3/2}}\hat{\mathbf{i}}.\end{equation*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-dcb23a49f711983f534206fb6e471c8b_l3.svg "Rendered by QuickLaTeX.com")
 ,
,  , and
, and  , and confirm that the resulting expressions match our physical expectations. Let’s do so:
, and confirm that the resulting expressions match our physical expectations. Let’s do so: . So, let
. So, let  in Equation
in Equation ![\begin{eqnarray*}\lim_{d\rightarrow0}\vec{\mathbf{E}}&=&\frac{1}{4\pi\epsilon_0}\frac{2qz}{\left[z^2\right]^{3/2}}\hat{\mathbf{k}}\\&=&\frac{1}{4\pi\epsilon_0}\frac{2qz}{z^3}\hat{\mathbf{k}}\\&=&\frac{1}{4\pi\epsilon_0}\frac{2q}{z^2}\hat{\mathbf{k}},\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-adda69f3328b6b6d86868aacb50a8499_l3.svg "Rendered by QuickLaTeX.com")


 , then
, then  , as it should; the two charges “merge” and so cancel out.
, as it should; the two charges “merge” and so cancel out.
 charge per unit length (
charge per unit length ( )
) charge per unit area (
charge per unit area ( )
) charge per unit volume (
charge per unit volume ( )
) ,
,  , or
, or  respectively:
respectively:



 ,
,  , or
, or  as the case may be, expressed in terms of
as the case may be, expressed in terms of  to the location of interest,
to the location of interest,  (the point in space where you want to determine the field). However, don’t confuse this with the meaning of
(the point in space where you want to determine the field). However, don’t confuse this with the meaning of ![\[E_x(P)=\frac{1}{4\pi\epsilon_0}\int_{\mathrm{line}}\left(\frac{\lambda dl}{r^2}\right)_x,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8504119da9a5d5e1922ddc3fdfe70757_l3.svg "Rendered by QuickLaTeX.com")
![\[E_y(P)=\frac{1}{4\pi\epsilon_0}\int_{\mathrm{line}}\left(\frac{\lambda dl}{r^2}\right)_y,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4730aaf5302ef7efa3ea0c448a7e060d_l3.svg "Rendered by QuickLaTeX.com")
![\[E_z(P)=\frac{1}{4\pi\epsilon_0}\int_{\mathrm{line}}\left(\frac{\lambda dl}{r^2}\right)_z.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d437dc6097ac49eb2f464b986dddce50_l3.svg "Rendered by QuickLaTeX.com")
 that carries a uniform line charge density
that carries a uniform line charge density  .
.
![\[\vec{\mathbf{E}}(P)=\frac{1}{4\pi\epsilon_0}\int_{\mathrm{line}}\frac{\lambda dl}{r^2}\hat{\mathbf{r}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-557900efd47354e5c72802ca3b08f1a5_l3.svg "Rendered by QuickLaTeX.com")
 is the vector sum of the fields from each of the two charge elements (call them
is the vector sum of the fields from each of the two charge elements (call them  and
and  , for now):
, for now):![\[\vec{\mathbf{E}}(P)=\vec{\mathbf{E}}_1+\vec{\mathbf{E}}_2=E_{ix}\hat{\mathbf{i}}+E_{1z}\hat{\mathbf{k}}+E_{2x}(-\hat{\mathbf{i}})+E_{2z}\hat{\mathbf{k}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-13c8d33ee055c2ea05bb91f019ffc036_l3.svg "Rendered by QuickLaTeX.com")
 , so those components cancel. This leaves
, so those components cancel. This leaves![\[\vec{\mathbf{E}}(P)=E_{1z}\hat{\mathbf{k}}+E_{2z}\hat{\mathbf{k}}=E_1\cos\theta\hat{\mathbf{k}}+E_2\cos\theta\hat{\mathbf{k}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f47a8a1a42d868f57d668f23163bccc8_l3.svg "Rendered by QuickLaTeX.com")

 , in this example, since we are integrating along a line of charge that lies on the
, in this example, since we are integrating along a line of charge that lies on the  to
to  , not
, not  to
to  , because we have constructed the net field from two differential pieces of charge
, because we have constructed the net field from two differential pieces of charge  . If we integrated along the entire length, we would pick up an erroneous factor of
. If we integrated along the entire length, we would pick up an erroneous factor of  .)
.) change as we integrate outward to the end of the line charge, so those are the variables to get rid of. We can do that the same way we did for the two point charges: by noticing that
change as we integrate outward to the end of the line charge, so those are the variables to get rid of. We can do that the same way we did for the two point charges: by noticing that![\[r=\left(z^2+x^2\right)^{1/2}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3be9714e8ba0899eeeab7d93f40d1471_l3.svg "Rendered by QuickLaTeX.com")
![\[\cos\theta=\frac{z}{r}=\frac{z}{\left(z^2+x^2\right)^{1/2}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-88b309d7ff132f898101b060dd9bc70d_l3.svg "Rendered by QuickLaTeX.com")
![\begin{eqnarray*}\vec{\mathbf{E}}(P)&=&\frac{1}{4\pi\epsilon_0}\int_0^{L/2}\frac{2\lambda dx}{\left(z^2+x^2\right)}\frac{z}{\left(z^2+x^2\right)^{1/2}}\hat{\mathbf{k}}\\&=&\frac{1}{4\pi\epsilon_0}\int_0^{L/2}\frac{2\lambda z}{\left(z^2+x^2\right)^{3/2}}dx\hat{\mathbf{k}}\\&=&\frac{2\lambda z}{4\pi\epsilon_0}\left.\left[\frac{x}{z^2\sqrt{z^2+x^2}}\right]\right|_0^{L/2}\hat{\mathbf{k}}\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bdfbdfad553ce0ec107817fdd9254147_l3.svg "Rendered by QuickLaTeX.com")

 to
to  .
.![\[\vec{\mathbf{E}}(P)=\frac{1}{4\pi\epsilon_0}\int_{-\infty}^{\infty}\frac{\lambda dx}{r^2}\cos\theta\hat{\mathbf{k}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8465d817b7a2cf532d9f3f3497f3e565_l3.svg "Rendered by QuickLaTeX.com")
![\begin{eqnarray*}\vec{\mathbf{E}}(P)&=&\frac{1}{4\pi\epsilon_0}\int_{-\infty}^{\infty}\frac{\lambda dx}{\left(z^2+x^2\right)}\frac{z}{\left(z^2+x^2\right)^{1/2}}\hat{\mathbf{k}}\\&=&\frac{1}{4\pi\epsilon_0}\int_{-\infty}^{\infty}\frac{\lambda z}{\left(z^2+x^2\right)^{3/2}}dx\hat{\mathbf{k}}\\&=&\frac{\lambda z}{4\pi\epsilon_0}\left.\left[\frac{x}{z^2\sqrt{z^2+x^2}}\right]\right|_{-\infty}^{\infty}\hat{\mathbf{k}},\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3271ef18a6e2981b620ea28969898fa7_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{E}}(P)=\frac{1}{4\pi\epsilon_0}\frac{2\lambda}{z}\hat{\mathbf{k}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-db144de000bc7596421922b574d1c0b7_l3.svg "Rendered by QuickLaTeX.com")
 ,
,  dominates the
dominates the ![\[\vec{\mathbf{E}}\approx\frac{1}{4\pi\epsilon_0}\frac{\lambda L}{z^2}\hat{\mathbf{k}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a29822187f8c1826ccb3b5327c3c560b_l3.svg "Rendered by QuickLaTeX.com")
 ,
, , on the other hand, we get the field of an
, on the other hand, we get the field of an 
 dependence that we are used to. This will become even more intriguing in the case of an infinite plane.
dependence that we are used to. This will become even more intriguing in the case of an infinite plane.
![\[\vec{\mathbf{E}}(P)=\frac{1}{4\pi\epsilon_0}\int_{\mathrm{line}\frac{\lambda dl}{r^2}\hat{\mathbf{r}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a7551e8d4c82cfb006ff97ccdead0f6f_l3.svg "Rendered by QuickLaTeX.com")
 is of length
is of length  and therefore contains a charge equal to
and therefore contains a charge equal to  . The element is at a distance of
. The element is at a distance of  from
from  , and therefore the electric field is
, and therefore the electric field is
 , we find that
, we find that![\[\vec{\mathbf{E}}\approx\frac{1}{4\pi\epsilon_0}\frac{q_{\mathrm{tot}}}{z^2}\hat{\mathbf{z}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d068e7d88ca9ba37c9433a1df9bfaeab_l3.svg "Rendered by QuickLaTeX.com")
 and uniform charge density at a distance
and uniform charge density at a distance 
![\[\vec{\mathbf{E}}(P)=\frac{1}{4\pi\epsilon_0}\int_{\mathrm{surface}}\frac{\sigma dA}{r^2}\hat{\mathbf{r}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4e86c4b73db63571e7a78b0e7499b248_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{E}}(P)=\frac{1}{4\pi\epsilon_0}\int_{\mathrm{surface}}\frac{\sigma dA}{r^2}\cos\theta\hat{\mathbf{k}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8f7d0717b122510b7a0b1d1cce1b0a91_l3.svg "Rendered by QuickLaTeX.com")

 is the distance from the centre of the disk to the differential ring of charge.) Also, we already performed the polar angle integral in writing down
is the distance from the centre of the disk to the differential ring of charge.) Also, we already performed the polar angle integral in writing down 

![\[\vec{\mathbf{E}}(z)\approx\frac{1}{4\pi\epsilon_0}\frac{\sigma\pi R^2}{z^2}\hat{\mathbf{k}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b3e8ef9dafa5e3acf841eeb13f4e3db2_l3.svg "Rendered by QuickLaTeX.com")
 .
. , Equation
, Equation 
 -direction.
-direction.
 are equal and opposite, this means that in the region outside of the two planes, the electric fields cancel each other out to zero.
are equal and opposite, this means that in the region outside of the two planes, the electric fields cancel each other out to zero.![\[\vec{\mathbf{E}}=\frac{\sigma}{\epsilon_0}\hat{\mathbf{i}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-07565ea20bce46a2dfbe0eeb4ae04418_l3.svg "Rendered by QuickLaTeX.com")
 is because in the figure, the field is pointing in the
is because in the figure, the field is pointing in the  -direction.
-direction.



 and
and 
 .
. charge as entering the
charge as entering the 
 , pointing from the negative charge to the positive charge. The forces on the two charges are equal and opposite, so there is no net force on the dipole. However, there is a torque:
, pointing from the negative charge to the positive charge. The forces on the two charges are equal and opposite, so there is no net force on the dipole. However, there is a torque:![\begin{eqnarray*}\vec{\pmb{\uptau}}&=&\left(\frac{\vec{\mathbf{d}}}{2}\times\vec{\mathbf{F}}_+\right)+\left(-\frac{\vec{\mathbf{d}}}{2}\times\vec{\mathbf{F}}_-\right)\\&=&\left[\left(\frac{\vec{\mathbf{d}}}{2}\right)\times\left(+q\vec{\mathbf{E}}\right)+\left(-\frac{\vec{\mathbf{d}}}{2}\right)\times\left(-q\vec{\mathbf{E}}\right)\right]\\&=&q\vec{\mathbf{d}}\times\vec{\mathbf{E}}.\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b55a6d75c9819203a256f311217dedfb_l3.svg "Rendered by QuickLaTeX.com")

 .
. (the magnitude of each charge multiplied by the vector distance between them) is a property of the dipole; its value, as you can see, determines the torque that the dipole experiences in the external field. It is useful, therefore, to define this product as the so-called
(the magnitude of each charge multiplied by the vector distance between them) is a property of the dipole; its value, as you can see, determines the torque that the dipole experiences in the external field. It is useful, therefore, to define this product as the so-called 


 in the regions outside the dipole charges (
in the regions outside the dipole charges (
![\[\vec{\mathbf{E}}(z)=\frac{1}{4\pi\epsilon_0}\frac{\vec{\mathbf{p}}}{z^3}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-86b14318b2f45b67b092be7c43000d90_l3.svg "Rendered by QuickLaTeX.com")


![\[\vec{\mathbf{F}}_{12}(r)=\frac{1}{4\pi\epsilon_0}\frac{q_1q_2}{r_{12}^2}\hat{\mathbf{r}}_{12}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0d7db42c0238e4506150973eb4661d19_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{F}}(r)=\frac{1}{4\pi\epsilon_0}Q\sum_{i=1}^{N}\frac{q_i}{r_{i}^2}\hat{\mathbf{r}}_{i}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0d55c05907ca42e4ac104f4dafd345bf_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{F}}=Q\vec{\mathbf{E}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-01044dc01fc2f8e4be41139a1b168d91_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{E}}(P)=\frac{1}{4\pi\epsilon_0}\sum_{i=1}^{N}\frac{q_i}{r_{i}^2}\hat{\mathbf{r}}_{i}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-013ad690b8f58ada85514a8a08ce9eb8_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{E}}(z)=\frac{1}{4\pi\epsilon_0}\frac{2\lambda}{z}\hat{\mathbf{k}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-300b0da296229f321d5d070db50a8cd0_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{E}}=\frac{\sigma}{2\epsilon_0}\hat{\mathbf{k}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fd36b190455ae821592d4483969d2076_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{p}}=q\vec{\mathbf{d}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c0d2cd3542942aad670e8a1c8035ed4c_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{\tau}}=\vec{\mathbf{p}}\times\vec{\mathbf{E}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-520de8763b407323849f33d489887f9e_l3.svg "Rendered by QuickLaTeX.com")
 ), with protons and electrons having charges of opposite sign but equal magnitude; the magnitude of this basic charge is
), with protons and electrons having charges of opposite sign but equal magnitude; the magnitude of this basic charge is 

![\[dq=\lambda dl;~~dq=\sigma dA;~~dq=\rho dV.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-31e0a64ca6b908e946588df535c1a744_l3.svg "Rendered by QuickLaTeX.com")
 .
.
 where
where  everywhere else.
everywhere else. ? (b) How many electrons must be removed from a neutral object to leave a net charge of
? (b) How many electrons must be removed from a neutral object to leave a net charge of  ?
? electrons move through a pocket calculator during a full day’s operation, how many coulombs of charge moved through it?
electrons move through a pocket calculator during a full day’s operation, how many coulombs of charge moved through it? electrons through the starter motor. How many coulombs of charge were moved?
electrons through the starter motor. How many coulombs of charge were moved? of charge. How many fundamental units of charge is this?
of charge. How many fundamental units of charge is this? –
– copper penny is given a charge of
copper penny is given a charge of  . (a) How many excess electrons are on the penny? (b) By what percent do the excess electrons change the mass of the penny?
. (a) How many excess electrons are on the penny? (b) By what percent do the excess electrons change the mass of the penny? . (a) How many electrons are removed from the penny? (b) If no more than one electron is removed from an atom, what percent of the atoms are ionized by this charging process?
. (a) How many electrons are removed from the penny? (b) If no more than one electron is removed from an atom, what percent of the atoms are ionized by this charging process? protons in it and has a net charge of
protons in it and has a net charge of  (a very large charge for a small speck). How many electrons does it have?
(a very large charge for a small speck). How many electrons does it have? protons and a net charge of
protons and a net charge of  . (a) How many fewer electrons are there than protons? (b) If you paired them up, what fraction of the protons would have no electrons?
. (a) How many fewer electrons are there than protons? (b) If you paired them up, what fraction of the protons would have no electrons? –
– . What fraction of the copper’s electrons has been removed? (Each copper atom has
. What fraction of the copper’s electrons has been removed? (Each copper atom has  protons, and copper has an atomic mass of
protons, and copper has an atomic mass of  .)
.) –
– in
in  of its atoms? (Sulfur has an atomic mass of
of its atoms? (Sulfur has an atomic mass of  .)
.) of plutonium, given its atomic mass is
of plutonium, given its atomic mass is  and that each plutonium atom has
and that each plutonium atom has  protons?
protons? and
and  are held in place by
are held in place by  forces on each charge in appropriate directions. (a) Draw a free-body diagram for each particle. (b) Find the distance between the charges.
forces on each charge in appropriate directions. (a) Draw a free-body diagram for each particle. (b) Find the distance between the charges. are fixed
are fixed  apart, with the second one to the right. Find the magnitude and direction of the net force on a
apart, with the second one to the right. Find the magnitude and direction of the net force on a  –
– charge when placed at the following locations: (a) halfway between the two (b) half a meter to the left of the
charge when placed at the following locations: (a) halfway between the two (b) half a meter to the left of the 
 apart. What is the electric force of repulsion between nuclear protons?
apart. What is the electric force of repulsion between nuclear protons? . Approximate both bodies as point masses and point charges. (a) What value of
. Approximate both bodies as point masses and point charges. (a) What value of  and
and  are placed
are placed  apart. What is the force on a third charge
apart. What is the force on a third charge  placed midway between
placed midway between  , are attached to silk threads
, are attached to silk threads  long, which are in turn tied to the same point on the ceiling, as shown below. When the balls are given the same charge
long, which are in turn tied to the same point on the ceiling, as shown below. When the balls are given the same charge 
 and
and  are located at
are located at  and
and  . What is the force of
. What is the force of  on
on  ?
? . Assume that the distance between the spheres is so large compared with their radii that the spheres can be treated as point charges.
. Assume that the distance between the spheres is so large compared with their radii that the spheres can be treated as point charges. when they are
when they are  apart. After a conducting wire is connected between the spheres and then removed, they repel each other with a force of
apart. After a conducting wire is connected between the spheres and then removed, they repel each other with a force of  . What is the original charge on each sphere?
. What is the original charge on each sphere? is placed at the point
is placed at the point 
 apart. What force do they exert on a third particle of charge
apart. What force do they exert on a third particle of charge  that is
that is  from each of them?
from each of them? ,
,  , and
, and  are placed at the corners of the triangle shown below. What is the force on
are placed at the corners of the triangle shown below. What is the force on  and
and  are fixed at
are fixed at 
 . What is the force of
. What is the force of  experiences an upward force of magnitude
experiences an upward force of magnitude  when it is placed in a particular point in an electric field. (a) What is the electric field at that point? (b) If a charge
when it is placed in a particular point in an electric field. (a) What is the electric field at that point? (b) If a charge  is placed there, what is the force on it?
is placed there, what is the force on it? . Compare the gravitational and electric forces on a small dust particle of mass
. Compare the gravitational and electric forces on a small dust particle of mass  that carries a single electron charge. What is the acceleration (both magnitude and direction) of the dust particle?
that carries a single electron charge. What is the acceleration (both magnitude and direction) of the dust particle? from an alpha particle (
from an alpha particle ( ). (a) What is the electric field due to the alpha particle at the location of the electron? (b) What is the electric field due to the electron at the location of the alpha particle? (c) What is the electric force on the alpha particle? On the electron?
). (a) What is the electric field due to the alpha particle at the location of the electron? (b) What is the electric field due to the electron at the location of the alpha particle? (c) What is the electric force on the alpha particle? On the electron? . The length of each thread is
. The length of each thread is  , and at equilibrium, the balls are separated by an angle
, and at equilibrium, the balls are separated by an angle  . How does
. How does  .
. is
is 

 is given a charge of
is given a charge of 
 from a point charge
from a point charge  )? What is the force on the electron in that orbit?
)? What is the force on the electron in that orbit?
 apart. (a) What is the electric field at a point
apart. (a) What is the electric field at a point  from the negative charge and along the line between the two charges? (b)What is the force on an electron placed at that point?
from the negative charge and along the line between the two charges? (b)What is the force on an electron placed at that point? are placed
are placed  situated there?
situated there? and
and  along the
along the  at the origin?
at the origin? are fixed on the
are fixed on the  and
and 
 ,
, 
 . An electron is placed
. An electron is placed  above the centre of the plate. What is the acceleration of the electron?
above the centre of the plate. What is the acceleration of the electron?
 apart. If
apart. If  electrons are moved from one plate to the other, what is the electric field between the plates?
electrons are moved from one plate to the other, what is the electric field between the plates? at
at  . Then find the net field by integrating
. Then find the net field by integrating  apart. Each plate is
apart. Each plate is  and the other plate carries a net charge of
and the other plate carries a net charge of  What is the charge density on the inside surface of each plate? What is the electric field between the plates?
What is the charge density on the inside surface of each plate? What is the electric field between the plates? on a side is given a total charge of
on a side is given a total charge of  (a) What is the electric field
(a) What is the electric field  to
to  ? At
? At  ?
? to
to  ?
? and along the entire
and along the entire 
 and (b)
and (b)
 . (a) What are the force on and the acceleration of the proton? (b) Do the same calculation for an electron moving in this field.
. (a) What are the force on and the acceleration of the proton? (b) Do the same calculation for an electron moving in this field. . Determine the distance and time for each particle to acquire a kinetic energy of
. Determine the distance and time for each particle to acquire a kinetic energy of 
 carries an excess
carries an excess  electrons. What vertical electric field is needed to balance the gravitational force on the droplet at the surface of the earth?
electrons. What vertical electric field is needed to balance the gravitational force on the droplet at the surface of the earth? and the speed of the proton when it enters is
and the speed of the proton when it enters is  What distance
What distance  that carries a charge of
that carries a charge of  The sphere is attached to one end of a very thin silk string
The sphere is attached to one end of a very thin silk string  What is the angle that the string makes with the vertical?
What is the angle that the string makes with the vertical? are parallel to one another and perpendicular to the plane of the page. (See below.) What is the electrical field at
are parallel to one another and perpendicular to the plane of the page. (See below.) What is the electrical field at  , along the positive
, along the positive  arc of a circle of radius
arc of a circle of radius  as shown below. What is the electric field at
as shown below. What is the electric field at  ?
? , a proton is projected with a speed of
, a proton is projected with a speed of  directly at a large, positively charged plate whose charge density is
directly at a large, positively charged plate whose charge density is  . (See below.) (a) Does the proton reach the plate? (b) If not, how far from the plate does it turn around?
. (See below.) (a) Does the proton reach the plate? (b) If not, how far from the plate does it turn around?
 . (a) Use the work-energy theorem to calculate the maximum separation of the charges. (b) What do you have to assume about
. (a) Use the work-energy theorem to calculate the maximum separation of the charges. (b) What do you have to assume about  and
and  situated
situated  from each other. (b) Draw the electric field lines map for two charges
from each other. (b) Draw the electric field lines map for two charges  situated
situated 
 and
and  fixed at the corners of an equilateral triangle of side
fixed at the corners of an equilateral triangle of side  .
. rather than as
rather than as  ,
,  .
. ,
,  .
. , (b) what is the torque on this dipole with an electric field of
, (b) what is the torque on this dipole with an electric field of  ? (c) What is the torque on this dipole with an electric field of
? (c) What is the torque on this dipole with an electric field of ? (d) What is the torque on this dipole with an electric field of
? (d) What is the torque on this dipole with an electric field of  ?
? (see below). Calculate the net dipole moment of a water molecule that is placed in a uniform, horizontal electric field of magnitude
(see below). Calculate the net dipole moment of a water molecule that is placed in a uniform, horizontal electric field of magnitude  . (You are missing some information for solving this problem; you will need to determine what information you need, and look it up.)
. (You are missing some information for solving this problem; you will need to determine what information you need, and look it up.) and
and  are located at
are located at  and
and  . What is the force of
. What is the force of  –
– –
– and
and  what is the net force on
what is the net force on  to
to 
 is released from rest when it is
is released from rest when it is  What is the kinetic energy of
What is the kinetic energy of  of the hypotenuse of the triangle shown below?
of the hypotenuse of the triangle shown below?

 and
and  What is the electric field at
What is the electric field at  What is the kinetic energy of
What is the kinetic energy of  ?
?
 to
to  with a density
with a density  where
where  What is the electric force on the point charge
What is the electric force on the point charge  on
on  Then, find the net force by integrating
Then, find the net force by integrating 

 of area
of area  that is perpendicular to the uniform electric field
that is perpendicular to the uniform electric field 
 , or
, or 

 . Electric flux is a scalar quantity and has an SI unit of newton-meters squared per coulomb (
. Electric flux is a scalar quantity and has an SI unit of newton-meters squared per coulomb ( ). Notice that
). Notice that  , demonstrating that electric flux is a measure of the number of field lines crossing a surface.
, demonstrating that electric flux is a measure of the number of field lines crossing a surface.
 .
.  of area
of area  whose projection onto the
whose projection onto the  -plane is
-plane is 

 as a unit vector normal to
as a unit vector normal to ![\[\Phi=\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}_2A_2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2fce6c1e6e99609ff1000b3d5502ccb8_l3.svg "Rendered by QuickLaTeX.com")
 . This allows us to write the last equation in a more compact form. What should the magnitude of the area vector be? What should the direction of the area vector be? What are the implications of how you answer the previous question?
. This allows us to write the last equation in a more compact form. What should the magnitude of the area vector be? What should the direction of the area vector be? What are the implications of how you answer the previous question? has the following magnitude and direction:
has the following magnitude and direction: ); that is, perpendicular to the surface.
); that is, perpendicular to the surface.

 has been given a consistent set of normal vectors that allows us to define the flux through the surface.
has been given a consistent set of normal vectors that allows us to define the flux through the surface.

 ) is negative, because
) is negative, because  ) is positive, because the electric field and the normal are in the same direction. The electric flux through the other faces is zero, since the electric field is perpendicular to the normal vectors of those faces. The net electric flux through the cube is the sum of fluxes through the six faces. Here, the net flux through the cube is equal to zero. The magnitude of the flux through rectangle
) is positive, because the electric field and the normal are in the same direction. The electric flux through the other faces is zero, since the electric field is perpendicular to the normal vectors of those faces. The net electric flux through the cube is the sum of fluxes through the six faces. Here, the net flux through the cube is equal to zero. The magnitude of the flux through rectangle  is equal to the magnitudes of the flux through both the top and bottom faces.
is equal to the magnitudes of the flux through both the top and bottom faces.
 . (We have used the symbol
. (We have used the symbol  to remind us that the area is of an arbitrarily small patch.) With sufficiently small patches, we may approximate the electric field over any given patch as uniform. Let us denote the average electric field at the location of the
to remind us that the area is of an arbitrarily small patch.) With sufficiently small patches, we may approximate the electric field over any given patch as uniform. Let us denote the average electric field at the location of the 
![\[\vec{\mathbf{E}}_i=\mathrm{average~electric~field~over~the~}i\mathrm{th~patch}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7159d40292e4e4c996a67912d10d5a59_l3.svg "Rendered by QuickLaTeX.com")
 through the area of the
through the area of the ![\[\Phi_i=\vec{\mathbf{E}}_i\cdot\delta\vec{\mathbf{A}}_i~(i\mathrm{th~patch}).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ea578e61b31ebef19bacb3b95c3ce117_l3.svg "Rendered by QuickLaTeX.com")
![\[\Phi=\sum_{i=1}^{N}\Phi_i=\sum_{i=1}^{N}\vec{\mathbf{E}}_i\cdot\delta\vec{\mathbf{A}}_i~(N\mathrm{patch~estimate}).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3c9e34e37941ae548c4859580f8025a7_l3.svg "Rendered by QuickLaTeX.com")
 through an area
through an area  . It is positive when the angle between
. It is positive when the angle between  representing the integral over
representing the integral over 

 points in the direction of the positive
points in the direction of the positive  -plane and in the (b)
-plane and in the (b) 
 , where the definition of dot product is crucial.
, where the definition of dot product is crucial. .
.

 because the area vector here points downward.
because the area vector here points downward. .
. is directed parallel to the
is directed parallel to the  -plane at
-plane at  above the
above the  located in the
located in the 
 , where the direction and magnitude of the electric field are constant.
, where the direction and magnitude of the electric field are constant.
 through the rectangular surface shown in
through the rectangular surface shown in 
 . Since the electric field is not uniform over the surface, it is necessary to divide the surface into infinitesimal strips along which
. Since the electric field is not uniform over the surface, it is necessary to divide the surface into infinitesimal strips along which 


![\[\vec{\mathbf{E}}_P=\frac{1}{4\pi\epsilon_0}\frac{1}{r^2}\hat{\mathbf{r}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-113dc584eb540e80c04ce7b9842e4915_l3.svg "Rendered by QuickLaTeX.com")

 to this system and substitute known values. On the sphere,
to this system and substitute known values. On the sphere,  and
and  , so for an infinitesimal area
, so for an infinitesimal area ![\[d\Phi=\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}dA=\frac{1}{4\pi\epsilon_0}\frac{q}{R^2}\hat{\mathbf{r}}\cdot\hat{\mathbf{r}}dA=\frac{1}{4\pi\epsilon_0}\frac{q}{R^2}dA.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-05d3542e7981c540af41e2eff4ee01db_l3.svg "Rendered by QuickLaTeX.com")
![\[\Phi=\frac{1}{4\pi\epsilon_0}\frac{q}{R^2}\oint_SdA=\frac{1}{4\pi\epsilon_0}\frac{q}{R^2}(4\pi R^2)=\frac{q}{\epsilon_0}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a654d905e3d12e063efde14f4feadbd0_l3.svg "Rendered by QuickLaTeX.com")


 rate of increase of the surface area.
rate of increase of the surface area.
 and leaves at
and leaves at 

 ) divided by the permittivity of free space (
) divided by the permittivity of free space ( ):
):![\[\Phi_{\mathrm{Closed~Surface}}=\frac{q_{\mathrm{enc}}}{\epsilon_0}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-86de69d789e6207c01d53e39e32846d2_l3.svg "Rendered by QuickLaTeX.com")

 . Note that
. Note that 



 , where
, where  .
. .
. .
. .
.
 . (If
. (If  .) Gauss’s law then simplifies to
.) Gauss’s law then simplifies to
![\[E\sim\frac{q_{\mathrm{enc}}}{\epsilon_0~\mathrm{area}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-861cfd74f7ec8c142c65fdfc39832ea7_l3.svg "Rendered by QuickLaTeX.com")
 is easily determined over the Gaussian surface.
is easily determined over the Gaussian surface. then the distribution has spherical symmetry (
then the distribution has spherical symmetry ( and the bottom half has a uniform charge density
and the bottom half has a uniform charge density  , then the sphere does not have spherical symmetry because the charge density depends on the direction (
, then the sphere does not have spherical symmetry because the charge density depends on the direction (
 . If the charge density is only a function of
. If the charge density is only a function of  , then you have spherical symmetry. If the density depends on
, then you have spherical symmetry. If the density depends on  you could change it by rotation; hence, you would not have spherical symmetry.
you could change it by rotation; hence, you would not have spherical symmetry.
 of the electric field can be positive or negative. When
of the electric field can be positive or negative. When  , the electric field at
, the electric field at  , the electric field at
, the electric field at 
![\[\Phi=\oint_S\vec{\mathbf{E}}_P\cdot\hat{\mathbf{n}}dA=E_P\oint_SdA=E_P4\pi r^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b86312a0a7711e2b5df03ba141d6d5a5_l3.svg "Rendered by QuickLaTeX.com")
![\[4\pi r^2E=\frac{q_{\mathrm{enc}}}{\epsilon_0}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-392df5638bd72e51d36acbcdf83149ce_l3.svg "Rendered by QuickLaTeX.com")


 —then the Gaussian surface containing
—then the Gaussian surface containing  , then the Gaussian surface encloses a smaller sphere than the sphere of charge distribution. In this case,
, then the Gaussian surface encloses a smaller sphere than the sphere of charge distribution. In this case, ![\[q_{\mathrm{enc}}=\left\{\begin{array}{l}q_{\mathrm{tot}}~(\mathrm{total~charge})~\mathrm{if}~r\geq R\\q_{\mathrm{within}~r<R}~(\mathrm{only~charge~within}~r<R)~\mathrm{if}~r<R\end{array}\right..\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-67622c076656d7e5317207d9819ef48b_l3.svg "Rendered by QuickLaTeX.com")
 , and the field at a point inside the charge distribution is called
, and the field at a point inside the charge distribution is called . Focusing on the two types of field points, either inside or outside the charge distribution, we can now write the magnitude of the electric field as
. Focusing on the two types of field points, either inside or outside the charge distribution, we can now write the magnitude of the electric field as

![\[q_{\mathrm{enc}}=\int\rho_{0}dV=\int_0^r\rho_04\pi r'^2dr'=\rho_0\left(\frac{4}{3}\pi r^3\right).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4b1c31cc1e70ad6ba77bd70a63c4cc73_l3.svg "Rendered by QuickLaTeX.com")
 , and a point inside the sphere, labeled
, and a point inside the sphere, labeled  .
.
 , whereas the field from each infinitesimal element of charge drops off
, whereas the field from each infinitesimal element of charge drops off  with the net result that the electric field within the distribution increases in strength linearly with the radius. The magnitude of the electric field outside the sphere decreases as you go away from the charges, because the included charge remains the same but the distance increases.
with the net result that the electric field within the distribution increases in strength linearly with the radius. The magnitude of the electric field outside the sphere decreases as you go away from the charges, because the included charge remains the same but the distance increases. 
 . The electric field is due to a spherical charge distribution of uniform charge density and total charge
. The electric field is due to a spherical charge distribution of uniform charge density and total charge  ,
,  .
.
![\[\rho(r)=ar^n~(r\leq R;~n\geq0),\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d1d9134f219242b3a74b946c60d38aca_l3.svg "Rendered by QuickLaTeX.com")
 so that the charge density is not undefined at
so that the charge density is not undefined at  . Find the electric field at a point outside the sphere and at a point inside the sphere.
. Find the electric field at a point outside the sphere and at a point inside the sphere. , as shown in
, as shown in  and the thickness
and the thickness  . Multiplying the volume with the density at this location, which is
. Multiplying the volume with the density at this location, which is  , gives the charge in the shell:
, gives the charge in the shell:![\[dq=ar'^n4\pi r'^2dr'.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f34385e6513bd255c19786432f075929_l3.svg "Rendered by QuickLaTeX.com")

 , then the Gaussian surface encloses more volume than the charge distribution, but the additional volume does not contribute to
, then the Gaussian surface encloses more volume than the charge distribution, but the additional volume does not contribute to  and
and  is empty of charges and therefore does not contribute to the integral over the volume enclosed by the Gaussian surface:
is empty of charges and therefore does not contribute to the integral over the volume enclosed by the Gaussian surface:![\[q_{\mathrm{enc}}=\int dq=\int_0^Rar'^n4\pir'^2dr'=\frac{4\pi a}{n+3}R^{n+3}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ac549f67f911b861daf09c3fb15c5412_l3.svg "Rendered by QuickLaTeX.com")
 above to obtain the electric field at a point outside the charge distribution as
above to obtain the electric field at a point outside the charge distribution as![\[\vec{\mathbf{E}}_{\mathrm{out}}=\left[\frac{aR^{n+3}}{\epsilon_0(n+3)}\right]\frac{1}{r^2}\hat{\mathbf{r}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-92a6be46ac01e59b077afb6a61b78acf_l3.svg "Rendered by QuickLaTeX.com")
 :
:![\[q_{\mathrm{enc}}=\int_0^rar'^n4\pir'^2dr'=\frac{4\pi a}{n+3}r^{n+3}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1f63d7e521ecfeaa426d893dff473bee_l3.svg "Rendered by QuickLaTeX.com")
 we find the electric field at a point that is a distance
we find the electric field at a point that is a distance ![\[\vec{\mathbf{E}}_{\mathrm{in}}=\left[\frac{a}{\epsilon_0(n+3)}\right]r^{n+1}\hat{\mathbf{r}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4d982eaef83a412c8b6f61528d98b25f_l3.svg "Rendered by QuickLaTeX.com")
 and
and  , does not have a usable cylindrical symmetry for this course. Neither does a cylinder in which charge density varies with the direction, such as a charge density
, does not have a usable cylindrical symmetry for this course. Neither does a cylinder in which charge density varies with the direction, such as a charge density  and
and  . A system with concentric cylindrical shells, each with uniform charge densities, albeit different in different shells, as in
. A system with concentric cylindrical shells, each with uniform charge densities, albeit different in different shells, as in 
 at any point
at any point  ,
,
 and height
and height 
![\[\int_S\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}dA=E\int_SdA=E(2\pi rL),\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d14f394dc97001d536f76bc401d10f3a_l3.svg "Rendered by QuickLaTeX.com")
 there. Thus, the flux is
there. Thus, the flux is![\[\int_S\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}dA=E(2\pi rL)+0+0=2\pi rLE.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-74701c7937f4af76b8c3ab63460ca7a0_l3.svg "Rendered by QuickLaTeX.com")
 ) times length
) times length ![\[q_{\mathrm{enc}}=\lambda_{\mathrm{enc}}L.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-10a63849bfe3d41a096695645be1b8d7_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathrm{Magnitude}:~E(r)=\frac{\lambda_{\mathrm{enc}}}{2\pi\epsilon_0}\frac{1}{r}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-037835954c1d91713002169ece0e456c_l3.svg "Rendered by QuickLaTeX.com")
![\[\lambda_{\mathrm{enc}}L=\left\{\begin{array}{l}(\mathrm{total~charge})~\mathrm{if}~r\geq R\\(\mathrm{only~charge~within}~r<R)~\mathrm{if}~r<R\end{array}\right..\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ea2faf5a10fea25a8891e823b278ed41_l3.svg "Rendered by QuickLaTeX.com")
 .
.![\[\lambda_{\mathrm{enc}}=\frac{\sigma_02\pi RL}{L}=2\pi R\sigma_0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4670366b70540ae98bcbc24863f07ac2_l3.svg "Rendered by QuickLaTeX.com")

![\[\vec{\mathbf{E}}=\frac{2\pi R\sigma_0}{2\pi\epsilon_0}\frac{1}{r}\hat{\mathbf{r}}=\frac{R\sigma_0}{\epsilon_0}\frac{1}{r}\hat{\mathbf{r}}\ (r>R)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-68c407edf0f6e85231a682f8085bb1b9_l3.svg "Rendered by QuickLaTeX.com")
 and in the opposite direction to
and in the opposite direction to  .
.![\[\lambda_{\mathrm{enc}}=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bae851137e7916aa96e6b11d7c27d646_l3.svg "Rendered by QuickLaTeX.com")

![\[E_{\mathrm{in}2\pi rL=0\ (r<R),\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-64f8bcc51cb46dcaa801bdcc46b23913_l3.svg "Rendered by QuickLaTeX.com")
![\[E_{\mathrm{in}}=0\ (r<R).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-81825c757f7aa9ea635ae231e569d657_l3.svg "Rendered by QuickLaTeX.com")
 .
. . Find the electric field at a distance
. Find the electric field at a distance  . Since the charge density is the same at all
. Since the charge density is the same at all  -coordinates in the
-coordinates in the  plane, by symmetry, the electric field at
plane, by symmetry, the electric field at 
 is the unit vector normal to the plane. Note that in this system,
is the unit vector normal to the plane. Note that in this system,  , although of course they point in opposite directions.
, although of course they point in opposite directions.




![\[\vec{\mathbf{E}}_P=\frac{\sigma_0}{2\epsilon_0}\hat{\mathbf{n}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6abb48862fed4cccd2ad444da789560d_l3.svg "Rendered by QuickLaTeX.com")
 , while below the plane,
, while below the plane,  .
.
 and
and 

![\[\vec{\mathbf{E}}_P=\vec{\mathbf{E}}_q+\vec{\mathbf{E}}_B+\vec{\mathbf{E}}_A=\vec{\mathbf{0}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-04a88d7d2a69bc5a56d56ffe7a7c1a7e_l3.svg "Rendered by QuickLaTeX.com")
 and hence
and hence

![\[\oing_S\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}dA=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e12c46b11ac31b2e9cc72d55bf058c3c_l3.svg "Rendered by QuickLaTeX.com")

 , a device that can detect a very slight amount of charge flowing from one shell to the other. When switch
, a device that can detect a very slight amount of charge flowing from one shell to the other. When switch  is thrown to the left, charge is placed on the outer shell by the battery
is thrown to the left, charge is placed on the outer shell by the battery  . Will charge flow through the electrometer to the inner shell?
. Will charge flow through the electrometer to the inner shell? . More recent measurements by
. More recent measurements by  , a number so small that the validity of Coulomb’s law seems indisputable.
, a number so small that the validity of Coulomb’s law seems indisputable.

 , respectively. The cylinder’s sides are perpendicular to the surface of the conductor, and its end faces are parallel to the surface. Because the cylinder is infinitesimally small, the charge density
, respectively. The cylinder’s sides are perpendicular to the surface of the conductor, and its end faces are parallel to the surface. Because the cylinder is infinitesimally small, the charge density  . Now
. Now  , since the cylinder is assumed to be small enough that
, since the cylinder is assumed to be small enough that ![\[E\Delta A=\frac{\sigma\Delta A}{\epsilon_0}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5f84355bec3ce87a992b8b3603d38ecf_l3.svg "Rendered by QuickLaTeX.com")
![\[E=\frac{\sigma}{\epsilon_0}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-268d7d8e5bfd67801ab99f2efa7ec967_l3.svg "Rendered by QuickLaTeX.com")


 , so the total flux through the Gaussian surface is
, so the total flux through the Gaussian surface is  rather than
rather than  . Then from Gauss’ law,
. Then from Gauss’ law,![\[EA=\frac{\sigma A}{\epsilon_0}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8a0f6dc97570a3dbdc3e37e6a52ee24a_l3.svg "Rendered by QuickLaTeX.com")
 , as shown in
, as shown in  . What is the electric field between the plates?
. What is the electric field between the plates?
 with the given values.
with the given values.![\[E=\frac{\sigma}{\epsilon_0}=\frac{6.81\times10^{-7}~\mathrm{C/m}^2}{8.85\times10^{-12}~\mathrm{C}^2/\mathrm{N~m}^2}=7.69\times10^4~\mathrm{N/C}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-55497c41f06afb9681f6876c80a849b8_l3.svg "Rendered by QuickLaTeX.com")

 . To calculate
. To calculate  , we apply Gauss’s law over a closed spherical surface
, we apply Gauss’s law over a closed spherical surface ![\[\oint_S\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}dA=E(r)\oint_SdA=E(r)4\pi r^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-42ac405f6c7fdf412f194f6a5e156f92_l3.svg "Rendered by QuickLaTeX.com")
![\[E(r)=0,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-eae98124994475e2fce8e2416d07b85c_l3.svg "Rendered by QuickLaTeX.com")
![\[E(r)4\pi r^2=\frac{q}{\epsilon_0}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6779c54a47ae0ae01af0286a8a913f07_l3.svg "Rendered by QuickLaTeX.com")
![\[\begin{array}{ll}\vec{\mathbf{E}}=\vec{\mathbf{0}}&(r<R),\\\vec{\mathbf{E}}=\frac{1}{4\pi\epsilon_0}\frac{q}{r^2}\hat{\mathbf{r}}&(r\geq R).\end{array}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3f04fa3cd95eeed814f0751e3d9113bd_l3.svg "Rendered by QuickLaTeX.com")
 , the electric field due to a charge
, the electric field due to a charge 

 inside it and the other a charge
inside it and the other a charge  , the polarization of the conductor results in
, the polarization of the conductor results in  on the inside surface of the cavity
on the inside surface of the cavity  on the inside surface of the cavity
on the inside surface of the cavity  on the outside surface (
on the outside surface (






![\[\Phi=\int_S\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}dA=\int_S\vec{\mathbf{E}}\cdot d\vec{\mathbf{A}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-941bd1366d3c415dfa60191a8fd351da_l3.svg "Rendered by QuickLaTeX.com")
![\[\Phi=\oint_S\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}dA=\frac{q_{\mathrm{enc}}}{\epsilon_0}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b1ff3348d8d3793530f973d9c9c3b503_l3.svg "Rendered by QuickLaTeX.com")
 .
. .
. .
. .
. ; b.
; b.  ; c.
; c.  ; This agrees with the calculation of
; This agrees with the calculation of  . If a
. If a  point charge is placed in the cavity, what is the net charge on the surface of the cavity and on the outer surface of the conductor?
point charge is placed in the cavity, what is the net charge on the surface of the cavity and on the outer surface of the conductor? is perpendicular to a square sheet with sides
is perpendicular to a square sheet with sides  to the field. Find the flux for both directions of the unit normal to the sheet.
to the field. Find the flux for both directions of the unit normal to the sheet. between two parallel plates where there is a constant electric field of
between two parallel plates where there is a constant electric field of  for the following orientations of the area: (a) parallel to the plates, (b) perpendicular to the plates, and (c) the normal to the area making a
for the following orientations of the area: (a) parallel to the plates, (b) perpendicular to the plates, and (c) the normal to the area making a  .
. when the area is parallel to the plate. Find the charge density on the sheet.
when the area is parallel to the plate. Find the charge density on the sheet. face each other with a separation of
face each other with a separation of  between them. The plates are charged with equal amount of opposite charges,
between them. The plates are charged with equal amount of opposite charges,  . The charges on the plates face each other. Find the flux through a circle of radius
. The charges on the plates face each other. Find the flux through a circle of radius  between the plates when the normal to the circle makes an angle of
between the plates when the normal to the circle makes an angle of  with a line perpendicular to the plates. Note that this angle can also be given as
with a line perpendicular to the plates. Note that this angle can also be given as  .
. is in a space of uniform electric field of magnitude
is in a space of uniform electric field of magnitude  . The amount of flux through it depends on how the square is oriented relative to the direction of the electric field. Find the electric flux through the square, when the normal to it makes the following angles with electric field: (a)
. The amount of flux through it depends on how the square is oriented relative to the direction of the electric field. Find the electric flux through the square, when the normal to it makes the following angles with electric field: (a)  . Note that these angles can also be given as
. Note that these angles can also be given as  .
. . (a) Find the flux of the vector field through a rectangle in the
. (a) Find the flux of the vector field through a rectangle in the  and
and  . (b) Do the same through a rectangle in the
. (b) Do the same through a rectangle in the  and
and  . What is its electric flux through a circular area of radius
. What is its electric flux through a circular area of radius  above the
above the  is at an unspecified location inside a cube of side
is at an unspecified location inside a cube of side  passes inward through the surface of a sphere of radius
passes inward through the surface of a sphere of radius  .
. on a side is
on a side is  . What is the total charge enclosed by the box?
. What is the total charge enclosed by the box? . What is the net charge enclosed by the surface?
. What is the net charge enclosed by the surface? so that the field is perpendicular to two opposite faces of the cube. What is the net flux through the cube?
so that the field is perpendicular to two opposite faces of the cube. What is the net flux through the cube? is distributed uniformly throughout a cubical volume whose edges are
is distributed uniformly throughout a cubical volume whose edges are  edges that is concentric with the charge distribution? (c) Do the same calculation for cubes whose edges are
edges that is concentric with the charge distribution? (c) Do the same calculation for cubes whose edges are  long and
long and  that is also concentric with the charge distribution?
that is also concentric with the charge distribution? . Rewrite the answers in terms of the total charge
. Rewrite the answers in terms of the total charge  for
for  and zero for
and zero for  . What is the electric field at a distance
. What is the electric field at a distance  from the centre of the sphere.
from the centre of the sphere. and
and  , respectively. Show that the electric field due to the charge is
, respectively. Show that the electric field due to the charge is![\[\begin{array}{ll}\vec{\mathbf{E}}=\vec{\mathbf{0}}&(r\leqr_1);\\\vec{\mathbf{E}}=\frac{Q}{4\pi\epsilon_0r^2}\left(\frac{r^3-r_1^3}{r_2^3-r_1^3}\right)\hat{\mathbf{r}}&(r_1\leq r\leq r_2);\\\vec{\mathbf{E}}=\frac{Q}{4\pi\epsilon_0r^2}\hat{\mathbf{r}}&(r\geq r_2).\end{array}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7e8c86f54ba70f7b0128cbf279f3323e_l3.svg "Rendered by QuickLaTeX.com")
 charge put on a
charge put on a  aluminum spherical ball at the following two points in space: (a) a point
aluminum spherical ball at the following two points in space: (a) a point  from the centre of the ball (an outside point).
from the centre of the ball (an outside point). . What is the electric field due to this charge at a point just above the surface of the sheet?
. What is the electric field due to this charge at a point just above the surface of the sheet? long copper rod of radius
long copper rod of radius  is charged with
is charged with  of charge and we seek electric field at a point
of charge and we seek electric field at a point  long copper rod of radius
long copper rod of radius  wooden rod is glued to a
wooden rod is glued to a  from the centre of the rod. (d) Same rod as (c), but we seek electric field at a point that is
from the centre of the rod. (d) Same rod as (c), but we seek electric field at a point that is  from the centre of the rod.
from the centre of the rod. on its surface. (a) Find the electric field at a point
on its surface. (a) Find the electric field at a point  and directed outward from the axis of the rod. (a) How much charge per unit length exists on the copper rod? (b) What would be the electric flux through a cube of side
and directed outward from the axis of the rod. (a) How much charge per unit length exists on the copper rod? (b) What would be the electric flux through a cube of side  . All charges on the aluminum rod reside at its surface. The inner surface of the copper shell has exactly opposite charge to that of the aluminum rod while the outer surface of the copper shell has the same charge as the aluminum rod. Find the magnitude and direction of the electric field at points that are at the following distances from the centre of the aluminum rod: (a)
. All charges on the aluminum rod reside at its surface. The inner surface of the copper shell has exactly opposite charge to that of the aluminum rod while the outer surface of the copper shell has the same charge as the aluminum rod. Find the magnitude and direction of the electric field at points that are at the following distances from the centre of the aluminum rod: (a)  , (b)
, (b)  , (c)
, (c)  , (d)
, (d)  , and (e)
, and (e)  .
.![\[\begin{array}{ll}E=\frac{\rho r}{2\epsilon_0}&(r\leq R);\\~&~\\E=\frac{\rho R^2}{2\epsilon_0r}&(r\geq R).\end{array}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5a1b5327e99d5e698ce933f89df9a31c_l3.svg "Rendered by QuickLaTeX.com")
 , where
, where  is a constant. Show that the field of this charge distribution is directed radially with respect to the cylinder and that
is a constant. Show that the field of this charge distribution is directed radially with respect to the cylinder and that![\[\begin{array}{ll}E=\frac{\alpha r^2}{2\epsilon_0}&(r\leq R);\\~&~\\E=\frac{\alpha R^3}{3\epsilon_0r}&(r\geq R).\end{array}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-edb86012f7142680819f9a686fd7ca74_l3.svg "Rendered by QuickLaTeX.com")
 . How much charge is on the surface of the ball?
. How much charge is on the surface of the ball? , where
, where  , where
, where  with a charge of
with a charge of  distributed uniformly throughout its volume. (a) What is the electric force exerted on an electron when it is
distributed uniformly throughout its volume. (a) What is the electric force exerted on an electron when it is  from the centre of the nucleus? (b) What is the acceleration of the electron at this point?
from the centre of the nucleus? (b) What is the acceleration of the electron at this point? , where
, where  and
and  is placed outside at a distance
is placed outside at a distance  . (a) Find the electric field inside and outside the cylinder. (b) Draw electric field lines in a plane perpendicular to the rod.
. (a) Find the electric field inside and outside the cylinder. (b) Draw electric field lines in a plane perpendicular to the rod. of charge. A copper spherical shell of inner radius
of charge. A copper spherical shell of inner radius  and outer radius
and outer radius  surrounds it. A total charge of
surrounds it. A total charge of  is put on the copper shell. (a) Find the electric field at all points in space, including points inside the aluminum and copper shell when copper shell and aluminum sphere are concentric. (b) Find the electric field at all points in space, including points inside the aluminum and copper shell when the centres of copper shell and aluminum sphere are
is put on the copper shell. (a) Find the electric field at all points in space, including points inside the aluminum and copper shell when copper shell and aluminum sphere are concentric. (b) Find the electric field at all points in space, including points inside the aluminum and copper shell when the centres of copper shell and aluminum sphere are  at the surface of a spherical conductor.
at the surface of a spherical conductor. . The plates are
. The plates are  apart. What is the electric field at the centre of the region between the plates?
apart. What is the electric field at the centre of the region between the plates? , are
, are  electrons are transferred from one plate to the other, what are (a) the charge density on each plate? (b) The electric field between the plates?
electrons are transferred from one plate to the other, what are (a) the charge density on each plate? (b) The electric field between the plates? .
. is placed at the centre of a spherical conducting shell of inner radius
is placed at the centre of a spherical conducting shell of inner radius  . The electric field just above the surface of the conductor is directed radially outward and has magnitude
. The electric field just above the surface of the conductor is directed radially outward and has magnitude  . (a) What is the charge density on the inner surface of the shell? (b) What is the charge density on the outer surface of the shell? (c) What is the net charge on the conductor?
. (a) What is the charge density on the inner surface of the shell? (b) What is the charge density on the outer surface of the shell? (c) What is the net charge on the conductor? and
and  ; (b)
; (b)  ; and (c)
; and (c)  .
. . Calculate
. Calculate  , where
, where  .
. for
for  .
. (see below). (b) If the hemisphere is rotated by
(see below). (b) If the hemisphere is rotated by  rather than
rather than  where
where  ,
,  and
and  . What is the net charge enclosed by the shaded volume shown below?
. What is the net charge enclosed by the shaded volume shown below? and
and  , as shown below. What is the net flux due to these charges through a square surface of side
, as shown below. What is the net flux due to these charges through a square surface of side  piece of aluminum foil of
piece of aluminum foil of  thickness has a charge of
thickness has a charge of  that spreads on both wide side surfaces evenly. You may ignore the charges on the thin sides of the edges. (a) Find the charge density. (b) Find the electric field
that spreads on both wide side surfaces evenly. You may ignore the charges on the thin sides of the edges. (a) Find the charge density. (b) Find the electric field  . One of the foils has a charge of
. One of the foils has a charge of  and the other has
and the other has  on the surface facing the other plate, and zero in between the plates. Find the electric flux through a
on the surface facing the other plate, and zero in between the plates. Find the electric flux through a  rectangular area between the plates, as shown below, for the following orientations of the area. (a) If the area is parallel to the plates, and (b) if the area is tilted
rectangular area between the plates, as shown below, for the following orientations of the area. (a) If the area is parallel to the plates, and (b) if the area is tilted  from the parallel direction. Note, this angle can also be
from the parallel direction. Note, this angle can also be  .
. and
and  contains a uniform volume charge density
contains a uniform volume charge density  and has a radius
and has a radius  (see below). Show that the electric field everywhere in the empty region is given by
(see below). Show that the electric field everywhere in the empty region is given by 
 and outer radius
and outer radius  is uniformly charged with charged density
is uniformly charged with charged density  and outer radius
and outer radius  that is also uniformly charged with charge density
that is also uniformly charged with charge density  . See below. Find the electric field at space point
. See below. Find the electric field at space point  , (b)
, (b)  , (c)
, (c)  , (d)
, (d)  , and (e)
, and (e)  .
. above the centre of the disk.
above the centre of the disk.  . (Hint: Fill the hole with
. (Hint: Fill the hole with  .)
.) ; and (d)
; and (d)  .
. ; (b)
; (b)  ; and (c)
; and (c)  ? (d) What is the net charge on the inner surface of the inner shell, the outer surface of the inner shell, the inner surface of the outer shell, and the outer surface of the outer shell?
? (d) What is the net charge on the inner surface of the inner shell, the outer surface of the inner shell, the inner surface of the outer shell, and the outer surface of the outer shell? is placed at the centre of an uncharged spherical conducting shell of inner radius
is placed at the centre of an uncharged spherical conducting shell of inner radius  and outer radius
and outer radius  . Find the electric field at (a)
. Find the electric field at (a)  , (b)
, (b)  , and (c)
, and (c)  . (d) What are the charges induced on the inner and outer surfaces of the shell?
. (d) What are the charges induced on the inner and outer surfaces of the shell? , the radius of the balloon is
, the radius of the balloon is  at the time
at the time  . Determine the electric field due to this charge as a function of time (a) at the surface of the balloon, (b) at the surface of radius
. Determine the electric field due to this charge as a function of time (a) at the surface of the balloon, (b) at the surface of radius 

 . Work is done by a force, but since this force is conservative, we can write
. Work is done by a force, but since this force is conservative, we can write  .
. on
on 
 done by the applied force
done by the applied force ![\[W_{12}=\int_{P_1}^{P_2}\vec{\mathbf{F}}\cdot d\vec{\mathbf{l}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7df2585a16a9883a5c3f5bda3f0d1518_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{F}}=-\vec{\mathbf{F}}_e=-\frac{kqQ}{r^2}\hat{\mathbf{r}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6a399910f7d26489c9d83b4ae3339386_l3.svg "Rendered by QuickLaTeX.com")
 to denote electric potential energy, which has units of joules (
to denote electric potential energy, which has units of joules ( ). When a conservative force does negative work, the system gains potential energy. When a conservative force does positive work, the system loses potential energy,
). When a conservative force does negative work, the system gains potential energy. When a conservative force does positive work, the system loses potential energy,  . In the system in
. In the system in  charge
charge  charge
charge  (
(
![\begin{eqnarray*}W_{12}&\!\!\!\!=\!\!\!\!&\int_{r_1}^{r_2}\vec{\mathbf{F}}\vdot d\vec{\mathbf{r}}=\int_{r_1}^{r_2}\frac{kqQ}{r^2}dr=\left[-\frac{kqQ}{r^2}\right]_{r_1}^{r_2}=kqQ\left[\frac{-1}{r_2}+\frac{1}{r_1}\right]\\&\!\!\!=\!\!\!&(8.99\times10^9~\mathrm{Nm}^2/\mathrm{C}^2)(5.0\times10^{-9}~\mathrm{C})(3.0\times10^{-9}~\mathrm{C})\left[\frac{-1}{0.15~\mathrm{m}}+\frac{1}{0.10~\mathrm{m}}\right]\\&\!\!\!=\!\!\!&4.5\times10^{-7}~\mathrm{J}.\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fe3e71f87d8753dcdeeda06044caaf3c_l3.svg "Rendered by QuickLaTeX.com")
 what is the speed of
what is the speed of  done to accelerate a positive charge from rest is positive and results from a loss in
done to accelerate a positive charge from rest is positive and results from a loss in  . A value for
. A value for 
 and thus the work becomes
and thus the work becomes![\[W_{12}=-kqQ\int_{r_1}^{r_2}\frac{1}{r^2}\hat{\mathbf{r}}\cdot\hat{\mathbf{r}}dr=kqQ\frac{1}{r_2}-kqQ\frac{1}{r_1}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4425d3ad51028638e95027f9aa6b82c9_l3.svg "Rendered by QuickLaTeX.com")
 in
in 
 and
and  are zero due to the electrical force being perpendicular to the displacement along these paths. Therefore, work on paths
are zero due to the electrical force being perpendicular to the displacement along these paths. Therefore, work on paths  and
and  , which is identical to
, which is identical to  , the net work would be zero (
, the net work would be zero ( , the electric field is itself conservative. That is,
, the electric field is itself conservative. That is,![\[\oint\vec{\mathbf{E}}\cdot d\vec{\mathbf{l}}=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-26051560c966398fb73daabc3288b907_l3.svg "Rendered by QuickLaTeX.com")

 to bring a charge from a reference point to a point of interest may be written as
to bring a charge from a reference point to a point of interest may be written as![\[W_{\mathrm{ref}}=\int_{r_{\mathrm{ref}}}^{r}\vec{\mathbf{F}}\cdot d\vec{\mathbf{l}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5435893a0598957ca9663ab48af22321_l3.svg "Rendered by QuickLaTeX.com")
 ) of the test charge
) of the test charge ![\[\Delta U=-\int_{r_{\mathrm{ref}}}^{r}\vec{\mathbf{F}}\cdot d\vec{\mathbf{l}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8319c8038a41833996504ff9042e16e0_l3.svg "Rendered by QuickLaTeX.com")
![\[\Delta U=-\int_{r_{\mathrm{ref}}}^{r}\frac{kqQ}{r^2}dr=-\left[-\frac{kqQ}{r}\right]_{r_{\mathrm{ref}}}^{r}=kqQ\left[\frac{1}{r}-\frac{1}{r_{\mathrm{ref}}}\right]\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-91c00e216113e22a0e72c94c8b897bc2_l3.svg "Rendered by QuickLaTeX.com")
![\[U(r)=k\frac{qQ}{r}-U_{\mathrm{ref}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-48b3bce579147774bb3f3f3dc656c1d1_l3.svg "Rendered by QuickLaTeX.com")
 from the equation (just like when we say the ground is zero potential energy in a gravitational potential energy problem), and the potential energy of
from the equation (just like when we say the ground is zero potential energy in a gravitational potential energy problem), and the potential energy of 

 . Since
. Since ![\begin{eqnarray*}\Delta U_{12}&\!\!\!=\!\!\!&-\int_{r_1}^{r_2}\vec{\mathbf{F}}\vdot d\vec{\mathbf{r}}=-\int_{r_1}^{r_2}\frac{kqQ}{r^2}dr=-\left[-\frac{kqQ}{r^2}\right]_{r_1}^{r_2}=kqQ\left[\frac{1}{r_2}-\frac{1}{r_1}\right]\\&\!\!\!=\!\!\!&(8.99\times10^9~\mathrm{Nm}^2/\mathrm{C}^2)(5.0\times10^{-9}~\mathrm{C})(3.0\times10^{-9}~\mathrm{C})\small{\left[\frac{1}{0.15~\mathrm{m}}-\frac{1}{0.10~\mathrm{m}}\right]}\\&\!\!\!=\!\!\!&-4.5\times10^{-7}~\mathrm{J}.\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-46a8dbc53cfb457ebf40387e3302fee8_l3.svg "Rendered by QuickLaTeX.com")
 ,
,  , and
, and  at the vertices of a square of side
at the vertices of a square of side 
 charge to the origin. Since there are no other charges at a finite distance from this charge yet, no work is done in bringing it from infinity,
charge to the origin. Since there are no other charges at a finite distance from this charge yet, no work is done in bringing it from infinity,![\[W_1=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-97f6807af93875d1bd15135403e80ab8_l3.svg "Rendered by QuickLaTeX.com")
 charge to
charge to  (
(![\[W_2=k\frac{q_1q_2}{r_{12}}=8.99\times10^9~\mathrm{Nm}^2\mathrm{C}^{-2}\cdot\frac{(2.0\times10^{-6}~\mathrm{C})(3.0\times10^{-6}~\mathrm{C})}{1.0\times10^{-2}~\mathrm{m}}=5.4~\mathrm{J}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b9f3e2489047d84ed5a9849582c5e1b3_l3.svg "Rendered by QuickLaTeX.com")

 to bring the
to bring the  charge to
charge to  (
(![\begin{eqnarray*}W_3&\!\!\!=\!\!\!&k\frac{q_1q_3}{r_{13}}+k\frac{q_2q_3}{r_{23}}\\&\!\!\!=\!\!\!&8.99\times10^9~\mathrm{Nm}^2\mathrm{C}^{-2}\\&\!\!\!~\!\!\!&\times\left[\frac{(2.0\times10^{-6}~\mathrm{C})(4.0\times10^{-6}~\mathrm{C})}{\sqrt{2.0}\times10^{-2}~\mathrm{m}}+\frac{(3.0\times10^{-6}~\mathrm{C})(4.0\times10^{-6}~\mathrm{C})}{1.0\times10^{-2}~\mathrm{m}}\right]\\&\!\!\!=\!\!\!&15.9~\mathrm{J}.\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-302f46e52d95406c4d8994c124299199_l3.svg "Rendered by QuickLaTeX.com")

 charge to
charge to  (
(![\begin{eqnarray*}W_4&\!\!\!=\!\!\!&kq_4\left[\frac{q_1}{r_{14}}+\frac{q_2}{r_{24}}+\frac{q_3}{r_{34}}\right]\\&\!\!\!=\!\!\!&(8.99\times10^9~\mathrm{Nm}^2\mathrm{C}^{-2})(5.0\times10^{-6}~\mathrm{C})\\&\!\!\!~\!\!\!&\times\left[\frac{2.0\times10^{-6}~\mathrm{C}}{1.0\times10^{-2}~\mathrm{m}}+\frac{3.0\times10^{-6}~\mathrm{C}}{\sqrt{2.0}\times10^{-2}~\mathrm{m}}+\frac{4.0\times10^{-6}~\mathrm{C}}{1.0\times10^{-2}~\mathrm{m}}\right]\\&\!\!\!=\!\!\!&36.5~\mathrm{J}.\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0fd5d9b43e012c21b6b4e6f7674ab9c2_l3.svg "Rendered by QuickLaTeX.com")

![\[W_T=W_1+W_2+W_3+W_4=0+5.4~\mathrm{J}+15.9~\mathrm{J}+36.5~\mathrm{J}=57.8~\mathrm{J}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b1983f4f6cf156aed972fff4b49cc2eb_l3.svg "Rendered by QuickLaTeX.com")
 , the potential energy goes up when
, the potential energy goes up when 
 and the direction and magnitude of
and the direction and magnitude of  (or simply potential, since electric is understood) to be the potential energy per unit charge:
(or simply potential, since electric is understood) to be the potential energy per unit charge:
 between two points, where
between two points, where![\[\Delta V=V_B-V_A=\frac{\Delta U}{q}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-567aa771666b980e94ef4654c6acf25c_l3.svg "Rendered by QuickLaTeX.com")
 ,
,  is defined to be the change in potential energy of a charge
is defined to be the change in potential energy of a charge ![\[1~\mathrm{V}=1~\mathrm{J/C}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-85979ab315a9ce4dc3a1d0a7283d18aa_l3.svg "Rendered by QuickLaTeX.com")

 . The car battery can move more charge than the motorcycle battery, although both are
. The car battery can move more charge than the motorcycle battery, although both are  batteries.
batteries. motorcycle battery that can move
motorcycle battery that can move  of charge, and a
of charge, and a  of charge. How much energy does each deliver? (Assume that the numerical value of each charge is accurate to three significant figures.)
of charge. How much energy does each deliver? (Assume that the numerical value of each charge is accurate to three significant figures.) , and the charge is given a change in potential energy equal to
, and the charge is given a change in potential energy equal to and
and  . The total energy delivered by the motorcycle battery is
. The total energy delivered by the motorcycle battery is![\[\Delta U_{\mathrm{cycle}}=(5000~\mathrm{C})(12.0~\mathrm{V})=(5000~\mathrm{C})(12.0~\mathrm{J/C})=6.00\times10^4~\mathrm{J}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5e1472c4eb21f223b51fecd55a3f56a8_l3.svg "Rendered by QuickLaTeX.com")
 and
and![\[\Delta U_{\mathrm{cycle}}=(60,000~\mathrm{C})(12.0~\mathrm{V})=7.20\times10^5~\mathrm{J}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0a0300bd2b6c35db86762f5c69689c7c_l3.svg "Rendered by QuickLaTeX.com")
 AAA battery have that can move
AAA battery have that can move  ?
? and the charge
and the charge 
 headlight, how many electrons pass through it each second?
headlight, how many electrons pass through it each second? . The charge moved is related to voltage and energy through the equations
. The charge moved is related to voltage and energy through the equations  lamp uses
lamp uses  joules per second. Since the battery loses energy, we have
joules per second. Since the battery loses energy, we have  and, since the electrons are going from the negative terminal to the positive, we see that
and, since the electrons are going from the negative terminal to the positive, we see that  .
.![\[q=\frac{\Delta U}{\Delta V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-41f2fb5d68a718be126780524ac3489a_l3.svg "Rendered by QuickLaTeX.com")
![\[q=\frac{-30.0~\mathrm{J}}{+12.0~\mathrm{V}}=\frac{-30.0~\mathrm{J}}{+12.0~\mathrm{J/C}}=-2.50~\mahtrm{C}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c22f54d1efc8f1f11a6555da128dc03a_l3.svg "Rendered by QuickLaTeX.com")
 is the total charge divided by the charge per electron. That is,
is the total charge divided by the charge per electron. That is,![\[n_e=\frac{-2.50~\mathrm{C}}{-1.60\times10^{-19}~\mathrm{C/e}^{-}}=1.56\times10^{19}~\mathrm{electrons}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ab741e5f25ec991543361ad29ac5a60e_l3.svg "Rendered by QuickLaTeX.com")
 lamp?
lamp?
 . The energy of the electron in electron-volts is numerically the same as the voltage between the plates. For example, a
. The energy of the electron in electron-volts is numerically the same as the voltage between the plates. For example, a  potential difference produces
potential difference produces  electrons. The conceptual construct, namely two parallel plates with a hole in one, is shown in (a), while a real electron gun is shown in (b).
electrons. The conceptual construct, namely two parallel plates with a hole in one, is shown in (a), while a real electron gun is shown in (b). . In equation form,
. In equation form,![\[1~\mathrm{eV}=(1.60\times10^{-19}~\mathrm{C})(1~\mathrm{V})=(1.60\times10^{-19}~\mathrm{C})(1~\mathrm{J/C})=1.60\times10^{-19}~\mathrm{J}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-dd26aa32e6419720393fa8bc3997846a_l3.svg "Rendered by QuickLaTeX.com")
 . It follows that an electron accelerated through
. It follows that an electron accelerated through  gains
gains  . A potential difference of
. A potential difference of  (
( ) gives an electron an energy of
) gives an electron an energy of  (
( ), and so on. Similarly, an ion with a double positive charge accelerated through
), and so on. Similarly, an ion with a double positive charge accelerated through  gains
gains  of energy. These simple relationships between accelerating voltage and particle charges make the electron-volt a simple and convenient energy unit in such circumstances.
of energy. These simple relationships between accelerating voltage and particle charges make the electron-volt a simple and convenient energy unit in such circumstances. of energy is required to break up certain organic molecules. If a proton is accelerated from rest through a potential difference of
of energy is required to break up certain organic molecules. If a proton is accelerated from rest through a potential difference of  , it acquires an energy of
, it acquires an energy of  (
( ) and can break up as many as
) and can break up as many as  of these molecules (
of these molecules ( per molecule
per molecule  molecules). Nuclear decay energies are on the order of
molecules). Nuclear decay energies are on the order of  (
( ) per event and can thus produce significant biological damage.
) per event and can thus produce significant biological damage. . A loss of
. A loss of  . Conservation of energy is stated in equation form as
. Conservation of energy is stated in equation form as![\[K+U=\mathrm{constant}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9fabdeb7934eebd0d62f3f5bb0217841_l3.svg "Rendered by QuickLaTeX.com")
![\[K_i+U_i=K_f+U_f\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6bf53c43daeb20ea08598906e65ffc66_l3.svg "Rendered by QuickLaTeX.com")
 stand for initial and final conditions. As we have found many times before, considering energy can give us insights and facilitate problem solving.
stand for initial and final conditions. As we have found many times before, considering energy can give us insights and facilitate problem solving. ,
,  ,
,  ,
,  .
.![\[K_i+U_i=K_f+U_f.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5849922e710772a146f260b59ff3514a_l3.svg "Rendered by QuickLaTeX.com")
![\[qV=\frac{mv^2}{2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7942dc406aaa2a64c324ed9a56305862_l3.svg "Rendered by QuickLaTeX.com")
 :
:![\[v=\sqrt{\frac{2qV}{m}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2223019f8c6e6a0e9142c4eab2886f61_l3.svg "Rendered by QuickLaTeX.com")
![\[v=\sqrt{\frac{2(-1.60\times10^{-19}~\mathrm{C})(-100~\mathrm{J/C})}{9.11\times10^{-31}~\mathrm{kg}}}=5.93\times10^6~\mathrm{m/s}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-217ac661377a855f282749eb8305d532_l3.svg "Rendered by QuickLaTeX.com")
![\[U_P=-\int_R^P\vec{\mathbf{F}}\cdot d\vec{\mathbf{l}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-11a352ea87688fd6855f071745688cfa_l3.svg "Rendered by QuickLaTeX.com")
 ), this becomes
), this becomes![\[U_P=-q\int_R^P\vec{\mathbf{E}}\cdot d\vec{\mathbf{l}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-dad1e6c2d35190ed7151a5eefbc74d94_l3.svg "Rendered by QuickLaTeX.com")
 ) to this potential energy, we find that, in general,
) to this potential energy, we find that, in general,
 and
and  , with
, with  and use
and use  . When we evaluate the integral
. When we evaluate the integral![\[V_P=-\int_R^P\vec{\mathbf{E}}\cdot d\vec{\mathbf{l}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-69a0ffa49d5a413d1c45555aaabab07a_l3.svg "Rendered by QuickLaTeX.com")
![\[V_r=-\int_{-\infty}^r\frac{kq}{r^2}\hat{\mathbf{r}}\cdot d\hat{\mathbf{r}}dr,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-32bc666140a74986b60961c2de953d22_l3.svg "Rendered by QuickLaTeX.com")
![\[V_r=-\int_{-\infty}^r\frac{kq}{r^2}dr=\frac{kq}{r}-\frac{kq}{\infty}=\frac{kq}{r}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-83585af2e5ff6d3ae9ab3f36b5e34b59_l3.svg "Rendered by QuickLaTeX.com")
![\[V_r=\frac{kq}{r}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-12e0db04882064d15de1be66d4aa4b02_l3.svg "Rendered by QuickLaTeX.com")

 . (Note that
. (Note that  in magnitude. For a charge that is moved from plate
in magnitude. For a charge that is moved from plate  .)
.)![\[W=-\Delta U=-q\Delta V.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-31954c423fa1754c0d6560efa9131ba8_l3.svg "Rendered by QuickLaTeX.com")
![\[-\Delta V=-(V_B-V_A)=V_A-V_B=V_{BA}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a8798656596d32534fb1e2aa5b6cdbe2_l3.svg "Rendered by QuickLaTeX.com")
![\[W=qV_{AB}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-70c5a7fe4bf9e6ae2ea45ae7fce4f932_l3.svg "Rendered by QuickLaTeX.com")
 ; here
; here  , since the path is parallel to the field. Thus,
, since the path is parallel to the field. Thus,  . Since
. Since  , we see that
, we see that  .
.![\[qEd=qV_{AB}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f783342d409ee1087b240aa36510c12e_l3.svg "Rendered by QuickLaTeX.com")
![\[\left.\begin{array}{l}V_{AB}=Ed\\E=\frac{V_{AB}}{d}\end{array}\right\}~(\mathrm{uniform}~E{\text -}\mathrm{field~only})\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1d8aac87b8d393416f1dbb72cb6c05c8_l3.svg "Rendered by QuickLaTeX.com")
![\[1~\mathrm{N/C}=1~\mathrm{V/m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-913976bbebf9a32088db921f64d0b90e_l3.svg "Rendered by QuickLaTeX.com")
![\[V_{AB}=V_B-V_A=-\int_R^B\vec{\mathbf{E}}\cdot d\vec{\mathbf{l}}+\int_R^A\vec{\mathbf{E}}\cdot d\vec{\mathbf{l}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e61d28c888cf03ad3a18551c65ccb205_l3.svg "Rendered by QuickLaTeX.com")
![\[V_B-V_A=-\int_A^B\vec{\mathbf{E}}\cdot d\vec{\mathbf{l}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-401665def3fe49a773d7175915aa6228_l3.svg "Rendered by QuickLaTeX.com")

 , while using
, while using 
![\[V_B-V_A=-\int_A^B\frac{kq}{r^2}\hat{\mathbf{r}}\cdot r\hat{\pmb{\upphi}}d\phi.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e02bff7de97caf80bc59e8cd1bab0a23_l3.svg "Rendered by QuickLaTeX.com")
 and therefore
and therefore![\[V_B-V_A=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fc9b24a5a1e8e55c2b54348dccec9b4b_l3.svg "Rendered by QuickLaTeX.com")
 . Above that value, the field creates enough ionization in the air to make the air a conductor. This allows a discharge or spark that reduces the field. What, then, is the maximum voltage between two parallel conducting plates separated by
. Above that value, the field creates enough ionization in the air to make the air a conductor. This allows a discharge or spark that reduces the field. What, then, is the maximum voltage between two parallel conducting plates separated by  to calculate the maximum voltage.
to calculate the maximum voltage.![\[V_{AB}=Ed.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ec9f2be58018143f503a42ee16217719_l3.svg "Rendered by QuickLaTeX.com")
![\[V_{AB}=(3.0\times10^6~\mathrm{V/m})(0.025~\mathrm{m})=7.5\times10^4~\mathrm{V}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f35dd871d0a363b27eafd200c0d49e50_l3.svg "Rendered by QuickLaTeX.com")
![\[V_{AB}=75~\mathrm{kV}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b5357ce5510a0f24843b662e91849f87_l3.svg "Rendered by QuickLaTeX.com")
 to make a spark jump across a
to make a spark jump across a  (
( ) gap, or
) gap, or  for a
for a  spark. This limits the voltages that can exist between conductors, perhaps on a power transmission line. A smaller voltage can cause a spark if there are spines on the surface, since sharp points have larger field strengths than smooth surfaces. Humid air breaks down at a lower field strength, meaning that a smaller voltage will make a spark jump through humid air. The largest voltages can be built up with static electricity on dry days (
spark. This limits the voltages that can exist between conductors, perhaps on a power transmission line. A smaller voltage can cause a spark if there are spines on the surface, since sharp points have larger field strengths than smooth surfaces. Humid air breaks down at a lower field strength, meaning that a smaller voltage will make a spark jump through humid air. The largest voltages can be built up with static electricity on dry days (
 and gives electrons
and gives electrons  of energy. (a) What is the electric field strength between the plates? (b) What force would this field exert on a piece of plastic with a
of energy. (a) What is the electric field strength between the plates? (b) What force would this field exert on a piece of plastic with a  charge that gets between the plates?
charge that gets between the plates? . Once we know the electric field strength, we can find the force on a charge by using
. Once we know the electric field strength, we can find the force on a charge by using ![\[E=\frac{V_{AB}}{d}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0032a1e1c42b0a929f883efbe1bee958_l3.svg "Rendered by QuickLaTeX.com")
 . Entering this value for
. Entering this value for  and the plate separation of
and the plate separation of  , we obtain
, we obtain![\[E=\frac{25.0~\mathrm{kV}}{0.0400~\mathrm{m}}=6.25\times10^5~\mathrm{V/m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-304f43658f9e5a4788c0c165a6503b9a_l3.svg "Rendered by QuickLaTeX.com")
![\[F=qE.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4f0bbc020615cee95d3cc31b31d22eb4_l3.svg "Rendered by QuickLaTeX.com")
![\[F=(0.500\times10^{-6}~\mathrm{C})(6.25\times10^5~\mathrm{V/m})=0.313~\mathrm{N}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2dd952a2ee704a217afc7a262154659e_l3.svg "Rendered by QuickLaTeX.com")
 . Because the electric field is uniform between the plates, the force on the charge is the same no matter where the charge is located between the plates.
. Because the electric field is uniform between the plates, the force on the charge is the same no matter where the charge is located between the plates. at the origin, calculate the potential difference between point
at the origin, calculate the potential difference between point  from
from  from
from  between them (
between them (
 and let
and let  and
and  , with
, with  with limits
with limits  , still using
, still using  which computes to
which computes to![\begin{eqnarray*}\Delta V&=&-\int_a^b\frac{kq}{r^2}dr=kq\left[\frac{1}{a}-\frac{1}{b}\right]\\&=&(8.99\times10^{9}~\mathrm{Nm}^2/\mathrm{C}^2)(2.0\times10^{-9}~\mathrm{C})\left[\frac{1}{0.040~\mathrm{m}}-\frac{1}{0.12~\mathrm{m}}\right]\\&=&300~\mathrm{V}.\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-eb4215bbb638c6d89a7311893ad597f8_l3.svg "Rendered by QuickLaTeX.com")
 , but
, but  . Adding the two parts together, we get
. Adding the two parts together, we get  .
. from the electric field
from the electric field  , as in the last section, we can obtain the following result.
, as in the last section, we can obtain the following result.
 is a constant equal to
is a constant equal to  .
.![\[E=\frac{F}{q_t}=\frac{kq}{r^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-be5303da8970404e23b0e71b046e7d7b_l3.svg "Rendered by QuickLaTeX.com")
 away from the center of a
away from the center of a  diameter solid metal sphere that has a
diameter solid metal sphere that has a  static charge?
static charge? .
.![\[V=k\frac{q}{r}=8.99\times10^{9}~\mathrm{N}\cdot\mathrm{m}^2/\mathrm{C}^2\left(\frac{-3.00\times10^{-9}~\mathrm{C}}{5.00\times10^{-2}~\mathrm{m}}\right)=-539~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-751d33ee87dc351c01a9ed9635817b3b_l3.svg "Rendered by QuickLaTeX.com")
 diameter metal sphere that produces a voltage of
diameter metal sphere that produces a voltage of 
 away. (The radius of the sphere is
away. (The radius of the sphere is ![\[V=\frac{kq}{r}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6f7f4b294f2ca29ac79f1d2b09e7103b_l3.svg "Rendered by QuickLaTeX.com")
![\[q=\frac{rV}{k}=\frac{(0.125~\mathrm{m})(100\times10^3~\mathrm{V})}{8.99\times10^{9}~\mathrm{N}\cdot\mathrm{m}^2/\mathrm{C}^2}=1.39\times10^{-6}~\mathrm{C}=1.39~\mu\mathrm{C}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-86679255d1d46729312f778b989e0c83_l3.svg "Rendered by QuickLaTeX.com")
 when considering gravitational potential energy
when considering gravitational potential energy  .
. . What is the net electric potential
. What is the net electric potential  be the electric potentials at
be the electric potentials at  at that point is equal to the sum of these individual electric potentials. You can easily show this by calculating the potential energy of a test charge when you bring the test charge from the reference point at infinity to point
at that point is equal to the sum of these individual electric potentials. You can easily show this by calculating the potential energy of a test charge when you bring the test charge from the reference point at infinity to point ![\[V_P=V_1+V_2+\ldots+V_N=\sum_1^NV_i.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-37a8ef4b85ec3ea280c974066d172368_l3.svg "Rendered by QuickLaTeX.com")
 from the
from the 
![\[U_P=q_tV_P=q_tk\sum_1^Nk\frac{q_i}{r_i},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-279725c5d2a1a781a0e4b80b2f8a7bd1_l3.svg "Rendered by QuickLaTeX.com")

 and separation distance
and separation distance  . What is the potential at the following locations in space? (a)
. What is the potential at the following locations in space? (a)  ; (b)
; (b)  ; (c)
; (c)  .
.
 to each of these three points.
to each of these three points.


 ; for example, when we are interested in the electric potential due to a polarized molecule such as a water molecule. This is not so far (infinity) that we can simply treat the potential as zero, but the distance is great enough that we can simplify our calculations relative to the previous example.
; for example, when we are interested in the electric potential due to a polarized molecule such as a water molecule. This is not so far (infinity) that we can simply treat the potential as zero, but the distance is great enough that we can simplify our calculations relative to the previous example.![\[V_P=V_++V_-=k\left(\frac{q}{r_+}-\frac{q}{r_-}\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fc410545ebb9f83b014a773971f0d214_l3.svg "Rendered by QuickLaTeX.com")
![\[r_{\pm}=\sqrt{x^2+\left(z\mp\frac{d}{2}\right)^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9e755f96aa16fec0594ece1f29e13516_l3.svg "Rendered by QuickLaTeX.com")

 and
and  . This gives us
. This gives us![\[r_{\pm}=\sqrt{r^2\sin^2\theta+\left(r\cos\theta\mp\frac{d}{2}\right)^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f9aad12ac9b0b233d6f4cf32b0da9b90_l3.svg "Rendered by QuickLaTeX.com")
![\[r_{\pm}=r\sqrt{\sin^2\theta\left(\cos\theta\mp\frac{d}{2r}\right)^2}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-874fdf862f0bea6fc8b88ac4cf2e79df_l3.svg "Rendered by QuickLaTeX.com")
![\[r_{\pm}=\sqrt{\sin^2\theta+\cos^2\theta\mp\cos\theta\frac{d}{r}+\left(\frac{d}{2r}\right)^2}=r\sqrt{1\mp\cos\theta\frac{d}{r}+\left(\frac{d}{2r}\right)^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b840481591bdf666f226b45d8b820d1e_l3.svg "Rendered by QuickLaTeX.com")
 is extremely small, effectively zero to the level we will probably be measuring), leaving us with
is extremely small, effectively zero to the level we will probably be measuring), leaving us with![\[r_{\pm}=r\sqrt{1\mp\cos\theta\frac{d}{r}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-64b52272585f1fe21e31ff3a9194de85_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{1}{1\mp\alpha}\approx1\pm\frac{\alpha}{2}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bd9203109a0427fe162bcf1661c6ac6a_l3.svg "Rendered by QuickLaTeX.com")
![\[V_P=k\left[\frac{q}{r}\left(1+\frac{d\cos\theta}{2r}\right)-\frac{q}{r}\left(1-\frac{d\cos\theta}{2r}\right)\right]=k\frac{qd\cos\theta}{r^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3b27e959f296a15427f27aeccb0e491e_l3.svg "Rendered by QuickLaTeX.com")

 . This quantity allows us to write the potential at point
. This quantity allows us to write the potential at point 

![\[V_P=k\sum\frac{q_i}{r_i}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9adf0a5b54027049188d91147b3ff5ad_l3.svg "Rendered by QuickLaTeX.com")

![\[dq=\left\{\begin{array}{ll}\lambda dl&\mathrm{(one~dimension)}\\\sigma dA&\mathrm{(two~dimensions)}\\\rho dV&\mathrm{(three~dimensions)}\\\end{array}\right.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8ec7191ff20337804d8b4b5ec806d40c_l3.svg "Rendered by QuickLaTeX.com")
 . The field point
. The field point 
 . The charge in this cell is
. The charge in this cell is  and the distance from the cell to the field point
and the distance from the cell to the field point  . Therefore, the potential becomes
. Therefore, the potential becomes![\begin{eqnarray*}V_P&\!\!\!=\!\!\!&k\int\frac{dq}{r}=k\int_{-L/2}^{L/2}\frac{\lambda dy}{\sqrt{x^2+y^2}}=k\lambda\left[\ln\left(y+\sqrt{y^2+x^2}\right)\right]_{-L/2}^{L/2}\\&\!\!\!=\!\!\!&k\lambda\left[\ln\left(\left(\frac{L}{2}\right)+\sqrt{\left(\frac{L}{2}\right)^2+x^2}\right)\right]-\ln\left(\left(-\frac{L}{2}\right)+\sqrt{\left(-\frac{L}{2}\right)^2+x^2}\right)\\&\!\!\!=\!\!\!&k\lambda\ln\left[\frac{L+\sqrt{L^2+4x^2}}{-L+\sqrt{L^2+4x^2}}\right].\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-826d320c15de44920efada475b5c56ac_l3.svg "Rendered by QuickLaTeX.com")

 . The element is at a distance of
. The element is at a distance of  from
from 

 shown in
shown in  at the field point has the following expression
at the field point has the following expression![\[dV_P=k\frac{dq}{\sqrt{z^2+r^2}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e0d84610ae8c4dd87497b36478c0d924_l3.svg "Rendered by QuickLaTeX.com")
![\[dq=\sigma2\pi rdr.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a8a4912e365c66ac50b956995d275a45_l3.svg "Rendered by QuickLaTeX.com")

![\[V_P=\lim_{L\rightarrow\infty}k\lambda\ln\left(\frac{L+\sqrt{L^2+4x^2}}{-L+\sqrt{L^2+4x^2}}\right).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6c6d98b8328a3132352aa72a29a3d993_l3.svg "Rendered by QuickLaTeX.com")
![[2/0]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-91e1f28622dbf8a0ffc574c3215ab58f_l3.svg "Rendered by QuickLaTeX.com") as
as 
 and
and  to obtain
to obtain![\[V_P-V_R=-\int_R^P2k\lambda\frac{1}{s}ds=-2k\lambda\lm\frac{s_P}{s_R}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-877605e78c29d586559b770900646d80_l3.svg "Rendered by QuickLaTeX.com")
 at
at  , this simplifies to
, this simplifies to![\[V_P=-2k\lambda\ln s_P.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e2b4a557620953ad7cf829ed58453033_l3.svg "Rendered by QuickLaTeX.com")
 ?
?![\[E=-\frac{\Delta V}{\Delta s}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5ddaced6bb0572cba65cf8536792be7f_l3.svg "Rendered by QuickLaTeX.com")
 is the distance over which the change in potential
is the distance over which the change in potential ![\[E_s=-\frac{dV}{ds}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c7e59dfbb32422a4e1c9e0cf7a979d74_l3.svg "Rendered by QuickLaTeX.com")

 . Note that A and B are assumed to be so close together that the field is constant along
. Note that A and B are assumed to be so close together that the field is constant along 




 , which has a spherical symmetry. Therefore, we use the spherical del operator in the formula
, which has a spherical symmetry. Therefore, we use the spherical del operator in the formula 

![\[\vec{\mathbf{E}}=-kq\left(\hat{\mathbf{r}}\frac{-1}{r^2}+\hat{\pmb{\uptheta}}0+\hat{\pmb{\upphi}}0\right)=-k\frac{q}{r^2}\hat{\mathbf{r}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-dacb05cdb31270a56a095d7234c6587f_l3.svg "Rendered by QuickLaTeX.com")



 found previously.
found previously.![\[E_z=-\frac{\partial}{\partial z}k\frac{q_{\mathrm{tot}}}{\sqrt{z^2+R^2}}=k\frac{q_{\mathrm{tot}}z}{(z^2+R^2)^{3/2}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-76f437dc6bea2931192eb6a281b2a6c7_l3.svg "Rendered by QuickLaTeX.com")
 and thus has the same value at any point that is a given distance
and thus has the same value at any point that is a given distance 
![\[W=-\Delta U=-q\Delta V=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6e050002ec0214199bcf90d2c1b48176_l3.svg "Rendered by QuickLaTeX.com")
![\[W=\vec{\mathbf{F}}\cdot\vec{\mathbf{d}}=q\vec{\mathbf{E}}\cdot\vec{\mathbf{d}}=qEd\cos\theta=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7cb35ff8366c739714af405aad1e4d2c_l3.svg "Rendered by QuickLaTeX.com")






 charge at the origin, what are the equipotential surfaces at which the potential is (a)
charge at the origin, what are the equipotential surfaces at which the potential is (a)  , and (d)
, and (d)  ?
? . Thus, the equipotential surfaces are spheres about the origin. Their locations are:
. Thus, the equipotential surfaces are spheres about the origin. Their locations are:




 .
.![\[E=\frac{\sigma}{\epsilon_0}=\frac{6.81\times10^{-7}~\mathrm{C/m}^2}{8.85\times10^{-12}~\mathrm{C}^2/(\mathrm{N}\cdot\mathrm{m}^2)}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ee7a425753a4bfa2307ba529e6ce1b8e_l3.svg "Rendered by QuickLaTeX.com")
 and the electric field
and the electric field  . The potential difference between the positive plate and the negative plate is then
. The potential difference between the positive plate and the negative plate is then![\[\Delta V=-\intE\cdot dl=E\int dl=El=(7.69\times10^4~\mathrm{V/m})(6.50\times10^{-3}~\mathrm{m})=500~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c17d8b771748bdd5ef7a05a953e0f9aa_l3.svg "Rendered by QuickLaTeX.com")
 , so
, so  of the distance between the plates will be the distance between
of the distance between the plates will be the distance between  potential differences. The distance between the plates is
potential differences. The distance between the plates is  , so there will be
, so there will be  between
between 
![\[\oint_S\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}da=E(r)\oint da=E(r)4\pi r^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8b89c64f1bd80813b5b0e88722d81cf0_l3.svg "Rendered by QuickLaTeX.com")
 , as expected inside a conductor at equilibrium. If
, as expected inside a conductor at equilibrium. If  . From Gauss’s law,
. From Gauss’s law,![\[\begin{array}{lr}E=0&(r<R),\\E=\frac{1}{4\pi\epsilon_0}\frac{q}{r^2}\hat{\mathbf{r}}&(r\geqR).\end{array}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5c2adf84769ffbcab95e6b431c1d679d_l3.svg "Rendered by QuickLaTeX.com")
![\[V(r)=\frac{1}{4\pi r\epsilon_0}\frac{q}{r}~(r\geq R)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b95fe73528cc03334b3bcca6b98c3cb6_l3.svg "Rendered by QuickLaTeX.com")
 is constant in this region. Since
is constant in this region. Since  ,
,![\[V(r)=\frac{1}{4\pi r\epsilon_0}\frac{q}{R}~(r<R)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-323868bcb3ca8d1ae31dcb3aab0ba762_l3.svg "Rendered by QuickLaTeX.com")
![\[\sigma_1R_1=\sigma_2R_2,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a04e74bb1a44d5983dfe661b7f7383e7_l3.svg "Rendered by QuickLaTeX.com")
 and
and  respectively, that are connected by a thin wire, as shown in
respectively, that are connected by a thin wire, as shown in 
![\[V=\frac{1}{4\pi r\epsilon_0}\frac{q}{R}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f03e3746d92dbcf30e931647fadbb140_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{1}{4\pi r\epsilon_0}\frac{q_1}{R_1}=\frac{1}{4\pi r\epsilon_0}\frac{q_2}{R_2},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6f37db5584a35ee79aa9920655684965_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{q_1}{R_1}=\frac{q_2}{R_2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-833602d3065b2478a1427f0c850f0103_l3.svg "Rendered by QuickLaTeX.com")
 . Substituting this equation into the previous one, we find
. Substituting this equation into the previous one, we find![\[\sigma_1 R_1=\sigma_2 R_2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7809fa434ef1da3eafa974597e7762dc_l3.svg "Rendered by QuickLaTeX.com")
 in
in 
 (the
(the 






 or
or 







![\[\Delta V=\frac{\Delta U}{q}~\mathrm{or}~\Delta U=q\Delta V.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-79b9328c3b641f468145c7b5aa0db419_l3.svg "Rendered by QuickLaTeX.com")
![\[1~\mathrm{eV}=(1.60\times10^{-19}~\mathrm{C})(~\mathrm{V})=(1.60\times10^{-19}~\mathrm{C})(~\mathrm{J/C})=1.60\times10^{-19}~\mathrm{J}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b255d40331623ed5c48b064cb9ad7830_l3.svg "Rendered by QuickLaTeX.com")


 at point
at point  which means that as
which means that as  since all of the potential energy gets converted to kinetic.
since all of the potential energy gets converted to kinetic.

 electrons
electrons recall that the electric field inside a conductor is zero. Hence, any path from a point on the surface to any point in the interior will have an integrand of zero when calculating the change in potential, and thus the potential in the interior of the sphere is identical to that on the surface.
recall that the electric field inside a conductor is zero. Hence, any path from a point on the surface to any point in the interior will have an integrand of zero when calculating the change in potential, and thus the potential in the interior of the sphere is identical to that on the surface. again the potential goes to zero due to cancellation.
again the potential goes to zero due to cancellation. separated by a distance
separated by a distance  separated by a distance
separated by a distance  .
. is not sufficient to determine
is not sufficient to determine  What about the other way around?
What about the other way around? apart. What do the distances between the surfaces in a particular region tell you about the strength of the
apart. What do the distances between the surfaces in a particular region tell you about the strength of the  fixed at a site with another charge
fixed at a site with another charge  mass
mass  ) moving in the neighboring space. (a) Evaluate the potential energy of
) moving in the neighboring space. (a) Evaluate the potential energy of  (b) If
(b) If  what will be its speed when it is
what will be its speed when it is  and
and  are placed symmetrically along the
are placed symmetrically along the  Consider a charge
Consider a charge  and mass
and mass  moving along the
moving along the  starts from rest at
starts from rest at  what is its speed when it reaches
what is its speed when it reaches  ?
? the average distance between proton and electron in a hydrogen atom. How much work is done?
the average distance between proton and electron in a hydrogen atom. How much work is done? of energy in
of energy in  ? (b) Considering the high-power output, why doesn’t the defibrillator produce serious burns?
? (b) Considering the high-power output, why doesn’t the defibrillator produce serious burns?
 to accelerate electrons to hit a copper plate and produce X-rays. Non-relativistically, what would be the maximum speed of these electrons?
to accelerate electrons to hit a copper plate and produce X-rays. Non-relativistically, what would be the maximum speed of these electrons? and
and  and having a potential difference (voltage) between them of
and having a potential difference (voltage) between them of  ?
? (a) What is the potential difference between the plates? (b) The plate with the lowest potential is taken to be zero volts. What is the potential
(a) What is the potential difference between the plates? (b) The plate with the lowest potential is taken to be zero volts. What is the potential  from the other?
from the other? and the membrane is
and the membrane is  thick. What is the electric field strength? (The value is surprisingly large, but correct.) You may assume a uniform electric field.
thick. What is the electric field strength? (The value is surprisingly large, but correct.) You may assume a uniform electric field. from the zero volt plate (and
from the zero volt plate (and  from the other) is
from the other) is  ? (b) What is the voltage between the plates?
? (b) What is the voltage between the plates? of air, given the maximum sustainable electric field strength in air to be
of air, given the maximum sustainable electric field strength in air to be 
 (a) What energy in
(a) What energy in  is given to the electron if it is accelerated through
is given to the electron if it is accelerated through  ? (b) Over what distance would it have to be accelerated to increase its energy by
? (b) Over what distance would it have to be accelerated to increase its energy by  ?
? and
and  for a point charge located at the origin. Here
for a point charge located at the origin. Here  where
where  explicitly stating the path over which you conduct the integration for the line integral.
explicitly stating the path over which you conduct the integration for the line integral. . At what temperature will the average kinetic energy of gas molecules be the same as that given these ions?
. At what temperature will the average kinetic energy of gas molecules be the same as that given these ions? -diameter plastic sphere, used in a static electricity demonstration, has a uniformly distributed
-diameter plastic sphere, used in a static electricity demonstration, has a uniformly distributed  charge on its surface. What is the potential near its surface?
charge on its surface. What is the potential near its surface? point charge is the potential
point charge is the potential  ?
? at a distance of
at a distance of  what are the sign and magnitude of the charge?
what are the sign and magnitude of the charge? from a fragment that has
from a fragment that has  protons in it? (b) What is the potential energy in
protons in it? (b) What is the potential energy in  of a similarly charged fragment at this distance?
of a similarly charged fragment at this distance? -diameter metal sphere with a charge of
-diameter metal sphere with a charge of  on it. (a) What is the potential near its surface? (b) At what distance from its center is the potential
on it. (a) What is the potential near its surface? (b) At what distance from its center is the potential  ? (c) An oxygen atom with three missing electrons is released near the Van de Graaff generator. What is its energy in
? (c) An oxygen atom with three missing electrons is released near the Van de Graaff generator. What is its energy in  -diameter metal sphere at a potential of
-diameter metal sphere at a potential of  drop of paint have to arrive at the object with a speed of
drop of paint have to arrive at the object with a speed of  ?
? from a
from a  point charge? (b) To what location should the point at
point charge? (b) To what location should the point at 
 and
and  in the diagram due to the two given charges.
in the diagram due to the two given charges. and
and  from origin at an angle
from origin at an angle  rod with
rod with  charge as a function of the perpendicular distance from the centre. Draw your graph from
charge as a function of the perpendicular distance from the centre. Draw your graph from  to
to  (b) On the same graph, plot the potential of a point charge with a
(b) On the same graph, plot the potential of a point charge with a  charge at the origin. (c) Which potential is stronger near the rod? (d) What happens to the difference as the distance increases? Interpret your result.
charge at the origin. (c) Which potential is stronger near the rod? (d) What happens to the difference as the distance increases? Interpret your result. The surfaces are equally spaced with
The surfaces are equally spaced with  for
for 
 for
for 
 for
for  What is the electric field in this region?
What is the electric field in this region? What is the electric field in this region?
What is the electric field in this region? between them. Consider one plate to be at
between them. Consider one plate to be at  and the other at
and the other at  (a) Sketch the equipotential surfaces for
(a) Sketch the equipotential surfaces for 

 and
and  (b) Next sketch in some electric field lines, and confirm that they are perpendicular to the equipotential lines.
(b) Next sketch in some electric field lines, and confirm that they are perpendicular to the equipotential lines. (a) As the distance from the sheet increases, does the potential increase or decrease? Can you explain why without any calculations? Does the location of your reference point matter? (b) What is the shape of the equipotential surfaces? (c) What is the spacing between surfaces that differ by
(a) As the distance from the sheet increases, does the potential increase or decrease? Can you explain why without any calculations? Does the location of your reference point matter? (b) What is the shape of the equipotential surfaces? (c) What is the spacing between surfaces that differ by  ?
? charge, which spreads on the surface of the sphere uniformly. The metallic sphere stands on an insulated stand and is surrounded by a larger metallic spherical shell, of inner radius
charge, which spreads on the surface of the sphere uniformly. The metallic sphere stands on an insulated stand and is surrounded by a larger metallic spherical shell, of inner radius  Now, a charge of
Now, a charge of  is placed on the inside of the spherical shell, which spreads out uniformly on the inside surface of the shell. If potential is zero at infinity, what is the potential of (a) the spherical shell, (b) the sphere, (c) the space between the two, (d) inside the sphere, and (e) outside the shell?
is placed on the inside of the spherical shell, which spreads out uniformly on the inside surface of the shell. If potential is zero at infinity, what is the potential of (a) the spherical shell, (b) the sphere, (c) the space between the two, (d) inside the sphere, and (e) outside the shell? face each other at a separation of
face each other at a separation of  (a) Find the electric potential everywhere. (b) An electron is released from rest at the negative plate; with what speed will it strike the positive plate?
(a) Find the electric potential everywhere. (b) An electron is released from rest at the negative plate; with what speed will it strike the positive plate? The plates are
The plates are  What is the electric potential outside and inside the pipe? Assume the pipe has a diameter of
What is the electric potential outside and inside the pipe? Assume the pipe has a diameter of 
 respectively. The inner shell has negligible thickness. What is the potential difference between the shells?
respectively. The inner shell has negligible thickness. What is the potential difference between the shells? The inner and outer shell carry net charges
The inner and outer shell carry net charges  respectively, where both
respectively, where both  (b)
(b)  and (c)
and (c)  what is the potential difference between the two conductors?
what is the potential difference between the two conductors? from the centre of the terminal of a Van de Graaff with a
from the centre of the terminal of a Van de Graaff with a  charge, noting that the field is equivalent to that of a point charge at the centre of the terminal? (b) At this distance, what force does the field exert on a
charge, noting that the field is equivalent to that of a point charge at the centre of the terminal? (b) At this distance, what force does the field exert on a  charge on the Van de Graaff’s belt?
charge on the Van de Graaff’s belt? (b) Explain why the electron will not be pulled back to the positive plate once it moves through the hole.
(b) Explain why the electron will not be pulled back to the positive plate once it moves through the hole.
 volts with respect to the outer metal tube. Consider a point
volts with respect to the outer metal tube. Consider a point 

 and find the value of the electric field at a point
and find the value of the electric field at a point  Above this strength, sparking takes place because air begins to ionize. (a) At this electric field strength, how far would a proton travel before hitting the speed of light (ignore relativistic effects)? (b) Is it practical to leave air in particle accelerators?
Above this strength, sparking takes place because air begins to ionize. (a) At this electric field strength, how far would a proton travel before hitting the speed of light (ignore relativistic effects)? (b) Is it practical to leave air in particle accelerators? from the alpha particle and held there while the second electron is brought to
from the alpha particle and held there while the second electron is brought to  each fixed at the corners of a cube of side
each fixed at the corners of a cube of side 
 (b) At what temperature will atoms of a gas have an average kinetic energy equal to this needed electrical potential energy?
(b) At what temperature will atoms of a gas have an average kinetic energy equal to this needed electrical potential energy? (a) Calculate its kinetic energy in joules at
(a) Calculate its kinetic energy in joules at  of the speed of light. (b) What is this in electron-volts? (c) What voltage would be needed to obtain this energy?
of the speed of light. (b) What is this in electron-volts? (c) What voltage would be needed to obtain this energy? The electron enters through a small hole in the negative plate and moves toward the positive plate. At the time the electron is near the negative plate, its speed is
The electron enters through a small hole in the negative plate and moves toward the positive plate. At the time the electron is near the negative plate, its speed is  Assume the electric field between the plates to be uniform, and find the speed of electron at (a)
Assume the electric field between the plates to be uniform, and find the speed of electron at (a)  (b)
(b)  (c)
(c)  and (d)
and (d)  between them, if their potential difference is
between them, if their potential difference is  ?
? if the plates are separated by
if the plates are separated by  and a potential difference of
and a potential difference of  is applied? (b) How close together can the plates be with this applied voltage?
is applied? (b) How close together can the plates be with this applied voltage? -thick membrane if the electric field strength across it is
-thick membrane if the electric field strength across it is  ? You may assume a uniform electric field.
? You may assume a uniform electric field. by the electric field between two parallel conducting plates separated by
by the electric field between two parallel conducting plates separated by  What is the electric field strength between the plates?
What is the electric field strength between the plates? million degrees Celsius
million degrees Celsius  (or kelvin). Through what voltage must a singly charged ion be accelerated to have the same energy as the average kinetic energy of ions at this temperature?
(or kelvin). Through what voltage must a singly charged ion be accelerated to have the same energy as the average kinetic energy of ions at this temperature? of charge through a potential difference of
of charge through a potential difference of  (a) What energy was dissipated? (b) What mass of water could be raised from
(a) What energy was dissipated? (b) What mass of water could be raised from  to the boiling point and then boiled by this energy? (c) Discuss the damage that could be caused to the tree by the expansion of the boiling steam.
to the boiling point and then boiled by this energy? (c) Discuss the damage that could be caused to the tree by the expansion of the boiling steam. from a proton (the average distance between the proton and electron in a hydrogen atom)?
from a proton (the average distance between the proton and electron in a hydrogen atom)? . At what distance from its centre is the potential
. At what distance from its centre is the potential  ? (b) What does your answer imply about the practical aspect of isolating such a large charge?
? (b) What does your answer imply about the practical aspect of isolating such a large charge? at a distance of
at a distance of  ?
? how close to the gold nucleus (
how close to the gold nucleus ( protons) could it come before being deflected?
protons) could it come before being deflected? of glass,
of glass,  of baby formula, and
of baby formula, and  of aluminum from
of aluminum from  to
to  (a) How much charge is moved by the battery? (b) How many electrons per second flow if it takes
(a) How much charge is moved by the battery? (b) How many electrons per second flow if it takes  to warm the formula? (Hint: Assume that the specific heat of baby formula is about the same as the specific heat of water.)
to warm the formula? (Hint: Assume that the specific heat of baby formula is about the same as the specific heat of water.) car from rest to
car from rest to  make it climb a
make it climb a  high hill, and finally cause it to travel at a constant
high hill, and finally cause it to travel at a constant  while climbing with
while climbing with  force for an hour.
force for an hour. of excess positive charge on it. (b) What is unreasonable about this result? (c) Which assumptions are responsible?
of excess positive charge on it. (b) What is unreasonable about this result? (c) Which assumptions are responsible? with respect to zero potential at infinity. How much charge is in the half-ring?
with respect to zero potential at infinity. How much charge is in the half-ring?
 Find the potential at a point
Find the potential at a point  is sprayed with a charged paint so that the charge varies continually with radial distance
is sprayed with a charged paint so that the charge varies continually with radial distance  Find the potential at a point
Find the potential at a point  by a negatively charged Van de Graff terminal? (b) What is unreasonable about this result? (c) Which assumptions are responsible?
by a negatively charged Van de Graff terminal? (b) What is unreasonable about this result? (c) Which assumptions are responsible? How far apart are the equipotential surfaces that represent a potential difference of
How far apart are the equipotential surfaces that represent a potential difference of  ?
? electric field near the surface of the Earth. If
electric field near the surface of the Earth. If  how small does
how small does  limit of the potential of a finite uniformly charged rod and show that it coincides with that of a point charge formula. (b) Why would you expect this result?
limit of the potential of a finite uniformly charged rod and show that it coincides with that of a point charge formula. (b) Why would you expect this result? is painted with a silver paint and then
is painted with a silver paint and then  of charge is placed on it. The charged pith ball is put at the centre of a gold spherical shell of inner radius
of charge is placed on it. The charged pith ball is put at the centre of a gold spherical shell of inner radius  (a) Find the electric potential of the gold shell with respect to zero potential at infinity. (b) How much charge should you put on the gold shell if you want to make its potential
(a) Find the electric potential of the gold shell with respect to zero potential at infinity. (b) How much charge should you put on the gold shell if you want to make its potential  are
are  from it that is between the plates?
from it that is between the plates? Find the electric potential at (a)
Find the electric potential at (a)  (b)
(b)  (c)
(c) 
 downward at its surface. (a) What is the magnitude and sign of the excess charge, noting the electric field of a conducting sphere is equivalent to a point charge at its centre? (b) What acceleration will the field produce on a free electron near Earth’s surface? (c) What mass object with a single extra electron will have its weight supported by this field?
downward at its surface. (a) What is the magnitude and sign of the excess charge, noting the electric field of a conducting sphere is equivalent to a point charge at its centre? (b) What acceleration will the field produce on a free electron near Earth’s surface? (c) What mass object with a single extra electron will have its weight supported by this field? and
and  are placed
are placed  apart. (a) At what point along the line between them is the electric field zero? (b) What is the electric field halfway between them?
apart. (a) At what point along the line between them is the electric field zero? (b) What is the electric field halfway between them? of an electron orbiting a proton in the hydrogen atom, given the radius of the orbit is
of an electron orbiting a proton in the hydrogen atom, given the radius of the orbit is  You may assume that the proton is stationary and the centripetal force is supplied by Coulomb attraction.
You may assume that the proton is stationary and the centripetal force is supplied by Coulomb attraction. in a uniform
in a uniform  electric field. The field accelerates the electron in the direction opposite to its initial velocity. (a) What is the direction of the electric field? (b) How far does the electron travel before coming to rest? (c) How long does it take the electron to come to rest? (d) What is the electron’s velocity when it returns to its starting point?
electric field. The field accelerates the electron in the direction opposite to its initial velocity. (a) What is the direction of the electric field? (b) How far does the electron travel before coming to rest? (c) How long does it take the electron to come to rest? (d) What is the electron’s velocity when it returns to its starting point? and three
and three  ions are placed alternately and equally spaced around a circle of radius
ions are placed alternately and equally spaced around a circle of radius  . Find the electrostatic energy stored.
. Find the electrostatic energy stored.


 of a capacitor is defined as the ratio of the maximum charge
of a capacitor is defined as the ratio of the maximum charge 
 ), named after Michael
), named after Michael ![\[1~\mathrm{F}=\frac{1~\mathrm{C}}{1~\mathrm{V}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-13e431479598a6417f64150f338fd41d_l3.svg "Rendered by QuickLaTeX.com")
 capacitor is able to store
capacitor is able to store  of charge (a very large amount of charge) when the potential difference between its plates is only
of charge (a very large amount of charge) when the potential difference between its plates is only  ) to millifarads (
) to millifarads ( ), which also includes microfarads (
), which also includes microfarads ( ). Capacitors can be produced in various shapes and sizes (
). Capacitors can be produced in various shapes and sizes (

 .
.
![\[\sigma=\frac{Q}{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-72151187fa19a8e15690bc7c1b092b36_l3.svg "Rendered by QuickLaTeX.com")
![\[E=\frac{\sigma}{\epsilon_0},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-daae05bf35dabc530b503421ed7e19fc_l3.svg "Rendered by QuickLaTeX.com")
 . The SI unit of
. The SI unit of  is equivalent to
is equivalent to  . Since the electrical field
. Since the electrical field ![\[V=Ed=\frac{\sigma d}{\epsilon_0}=\frac{Qd}{\epsilon_0A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2fb5411cbae0b7e20c39bfaf0e099327_l3.svg "Rendered by QuickLaTeX.com")

 remains constant.
remains constant. , separated by
, separated by  is applied to it?
is applied to it?![\[C=\epsilon_0\frac{A}{d}=\left(8.85\times10^{-12}~\mathrm{F/m}\right)\frac{1.00~\mathrm{m}^2}{1.00\times10^{-3}~\mathrm{m}}=8.85\times10^{-9}~\mathrm{F}=8.85~\mathrm{nF}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-017eb4192ddb79d19e12636a43d2bd77_l3.svg "Rendered by QuickLaTeX.com")
![\[Q=CV=(8.85\times10^{-9}~\mathrm{F})(3.00\times10^3~\mathrm{V})=26.6~\mu\mathrm{C}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3ecd582c6a7ea5b72738291c86c20d76_l3.svg "Rendered by QuickLaTeX.com")
 , no more charge can be stored on this capacitor by increasing the voltage.
, no more charge can be stored on this capacitor by increasing the voltage. . What area must you use for each plate if the plates are separated by
. What area must you use for each plate if the plates are separated by  ?
?![\[A=\frac{Cd}{\epsilon_0}=\frac{(1.0~\mathrm{F})(1.0\times10^{-3}~\mathrm{m})}{8.85\times10^{-12}~\mathrm{F/m}}=1.1\times10^8~\mathrm{m}^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-67335f51cd007e4fed6b1ae3f7384b15_l3.svg "Rendered by QuickLaTeX.com")
 across. It used to be a common prank to ask a student to go to the laboratory stockroom and request a
across. It used to be a common prank to ask a student to go to the laboratory stockroom and request a  parallel-plate capacitor, until stockroom attendants got tired of the joke.
parallel-plate capacitor, until stockroom attendants got tired of the joke. . If the area of each plate is
. If the area of each plate is  , what is the plate separation?
, what is the plate separation? and
and  have the same physical units.
have the same physical units.![\[\oint_S\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}dA=E(4\pi r^2)=\frac{Q}{\epsilon_0}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e43fcf4a0f3783053cc0178a1238120c_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{E}}=\frac{1}{4\pi\epsilon_0}\frac{Q}{r^2}\hat{\mathbf{r}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d468a58818b0e3c002916a119e29ab1d_l3.svg "Rendered by QuickLaTeX.com")
![\[V=\int_{R_1}^{R_2}\vec{\mathbf{E}}\cdot d\vec{\mathbf{l}}=\int_{R_1}^{R_2}\left(\frac{1}{4\pi\epsilon_0}\frac{Q}{r^2}\hat{\mathbf{r}}\right)\cdot(\hat{\mathbf{r}}dr)=\frac{Q}{4\pi\epsilon_0}\int_{R_1}^{R_2}\frac{dr}{r^2}=\frac{Q}{4\pi\epsilon_0}\left(\frac{1}{R_1}-\frac{1}{R_2}\right).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-238e3983a89a53e329b0db9bc2b21da3_l3.svg "Rendered by QuickLaTeX.com")
 . We substitute this result into Equation
. We substitute this result into Equation 

 .
.![\[V=\int_{R_1}^{+\infty}\vec{\mathbf{E}}\cdot d\vec{\mathbf{l}}=\frac{Q}{4\pi\epsilon_0}\int_{R_1}^{+\infty}\frac{1}{r^2}\hat{\mathbf{r}}\cdot(\hat{\mathbf{r}}dr)=\frac{Q}{4\pi\epsilon_0}\int_{R_1}^{+\infty}\frac{dr}{r^2}=\frac{1}{4\pi\epsilon_0}\frac{Q}{R_1}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-701bb2f3e401aaabec0376550b7fe1e3_l3.svg "Rendered by QuickLaTeX.com")
![\[C=\frac{Q}{V}=Q\frac{4\pi\epsilon_0R_1}{Q}=4\pi\epsilon_0R_1.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-060727e4f803add8a3c801b1b0f221fc_l3.svg "Rendered by QuickLaTeX.com")
 ?
?
 ) and the charge on the inner surface of the outer cylinder is negative (indicated by
) and the charge on the inner surface of the outer cylinder is negative (indicated by  ).
).![\[\oint_S\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}dA=E(2\pi rl)=\frac{Q}{\epsilon_0}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8b9b52cb865681e78d2afbe98e9af6d0_l3.svg "Rendered by QuickLaTeX.com")



![\[\frac{C}{l}=\frac{2\pi\epsilon_0}{\ln(R_2/R_1)}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-da477dcbe42e8d2bb4c52cc8804f35bc_l3.svg "Rendered by QuickLaTeX.com")
 . This can be accomplished with appropriate choices of radii of the conductors and of the insulating material between them.
. This can be accomplished with appropriate choices of radii of the conductors and of the insulating material between them. , a potential difference of
, a potential difference of  is measured between the cylinders. (a) What is the capacitance of this system? (b) If the cylinders are
is measured between the cylinders. (a) What is the capacitance of this system? (b) If the cylinders are 

 . The cell membrane may be
. The cell membrane may be  to
to  thick. Treating the cell membrane as a nano-sized capacitor, the estimate of the smallest electrical field strength across its ‘plates’ yields the value
thick. Treating the cell membrane as a nano-sized capacitor, the estimate of the smallest electrical field strength across its ‘plates’ yields the value  .
.
 (potassium) and
(potassium) and  on one capacitor may be different from the potential drop
on one capacitor may be different from the potential drop  on another capacitor, because, generally, the capacitors may have different capacitances. The series combination of two or three capacitors resembles a single capacitor with a smaller capacitance. Generally, any number of capacitors connected in series is equivalent to one capacitor whose capacitance (called the equivalent capacitance) is smaller than the smallest of the capacitances in the series combination. Charge on this equivalent capacitor is the same as the charge on any capacitor in a series combination: That is, all capacitors of a series combination have the same charge. This occurs due to the conservation of charge in the circuit. When a charge
on another capacitor, because, generally, the capacitors may have different capacitances. The series combination of two or three capacitors resembles a single capacitor with a smaller capacitance. Generally, any number of capacitors connected in series is equivalent to one capacitor whose capacitance (called the equivalent capacitance) is smaller than the smallest of the capacitances in the series combination. Charge on this equivalent capacitor is the same as the charge on any capacitor in a series combination: That is, all capacitors of a series combination have the same charge. This occurs due to the conservation of charge in the circuit. When a charge 
 ,. These potentials must sum up to the voltage of the battery, giving the following potential balance:
,. These potentials must sum up to the voltage of the battery, giving the following potential balance:![\[V=V_1+V_2+V_3.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0987e11487ea66a44a9355323ab9d182_l3.svg "Rendered by QuickLaTeX.com")
 . Entering the expressions for
. Entering the expressions for  , we get
, we get![\[\frac{Q}{C_{\mathrm{S}}}=\frac{Q}{C_1}+\frac{Q}{C_2}+\frac{Q}{C_3}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7028d973968967b515f5b772dae24a47_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{1}{C_{\mathrm{S}}}=\frac{1}{C_1}+\frac{1}{C_2}+\frac{1}{C_3}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c74778a7900da0ff945d93432a90d692_l3.svg "Rendered by QuickLaTeX.com")

 ,
,  , and
, and  .
.
 .
. of the parallel network, we note that the total charge
of the parallel network, we note that the total charge ![\[Q=Q_1+Q_2+Q_3.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-33a7c028d1ae92daa24032bdee3198c0_l3.svg "Rendered by QuickLaTeX.com")
 , which holds for the entire network. On the right-hand side of the equation, we use the relations
, which holds for the entire network. On the right-hand side of the equation, we use the relations  ,
,  , and
, and  for the three capacitors in the network. In this way we obtain
for the three capacitors in the network. In this way we obtain![\[C_{\mathrm{P}}V=C_1V+C_2V+C_3V.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-54dbf6a099dad07cf6c19739950c69cb_l3.svg "Rendered by QuickLaTeX.com")
![\[C_{\mathrm{P}}=C_1+C_2+C_3.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2de49e8e717c480373ebd78d5116a394_l3.svg "Rendered by QuickLaTeX.com")


 ,
,  , and
, and  .
.

 and
and  are in series; their equivalent capacitance is
are in series; their equivalent capacitance is  . Thus, the equivalent capacitance of the entire network is the sum of
. Thus, the equivalent capacitance of the entire network is the sum of  ,
,  ,
,  ). Round your answer to three decimal places.
). Round your answer to three decimal places.![\[\frac{1}{C_{\mathrm{S}}}=\frac{1}{C_1}+\frac{1}{C_2}=\frac{1}{1.000~\mu\mathrm{F}}+\frac{1}{5.000~\mu\mathrm{F}}=\frac{1.200}{\mu\mathrm{F}}\Rightarrow C_{\mathrm{S}}=0.833~\mu\mathrm{F}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-464f1559542c04e596e79fc8e65d3803_l3.svg "Rendered by QuickLaTeX.com")
![\[C=C_{\mathrm{S}}+C_3=0.833~\mu\mathrm{F}+8.000~\mu\mathrm{F}=8.833~\mu\mathrm{F}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c62ff4c42c62c1500ac4f2d3c1fd4237_l3.svg "Rendered by QuickLaTeX.com")
 ,
,  ,
,  . When a
. When a 
 of the parallel connection
of the parallel connection  to find the charges
to find the charges ![\[C_{23}=C_2+C_3=2.0~\mu\mathrm{F}+4.0~\mu\mathrm{F}=6.0~\mu\mathrm{F}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f8d9450095d651afb1a49f1a0cccfd5c_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{1}{C}=\frac{1}{12.0~\mu\mathrm{F}}+\frac{1}{6.0~\mu\mathrm{F}}=\frac{1}{4.0~\mu\mathrm{F}}\Rightarrow C=4.0~\mu\mathrm{F}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a5ec2b11d4719b5dcdfeffcbff61525c_l3.svg "Rendered by QuickLaTeX.com")
 . Also, the capacitors share the
. Also, the capacitors share the ![\[12.0~\mathrm{V}=V_1+V_{23}=\frac{Q_1}{C_1}+\frac{Q_{23}}{C_{23}}=\frac{Q_1}{12.0~\mu\mathrm{F}}}+\frac{Q_{1}}{6.0~\mu\mathrm{F}}}\Rightarrow Q_1=48.0~\mu\mathrm{C}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5c042b49fd3ef8d0d44b5f84ec1382e8_l3.svg "Rendered by QuickLaTeX.com")
![\[V_1=\frac{Q_1}{C_1}=\frac{48.0~\mu\mathrm{C}}{12.0~\mu\mathrm{F}}=4.0~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a5c69213db644a4762908f65b83e8714_l3.svg "Rendered by QuickLaTeX.com")
![\[V_2=V_3=12.0~\mathrm{V}-4.0~\mathrm{V}=8.0~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-84a5de2ce240c8418f59afa6a76fcba3_l3.svg "Rendered by QuickLaTeX.com")
![\[Q_2=C_2V_2=(2.0~\mu\mathrm{F})(8.0~\mathrm{V})=16.0~\mu\mathrm{C},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-77ed5f3929abe1ce220b54d67366b87f_l3.svg "Rendered by QuickLaTeX.com")
![\[Q_3=C_3V_3=(4.0~\mu\mathrm{F})(8.0~\mathrm{V})=32.0~\mu\mathrm{C}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9f498e701fb986d5e6c313f5bc12af24_l3.svg "Rendered by QuickLaTeX.com")
 .
. ,
,  ,
,  ,
,  . Find the charge on each capacitor, assuming there is a potential difference of
. Find the charge on each capacitor, assuming there is a potential difference of  joules this time.” The energy delivered by the defibrillator is stored in a capacitor and can be adjusted to fit the situation. SI units of joules are often employed. Less dramatic is the use of capacitors in microelectronics to supply energy when batteries are charged (
joules this time.” The energy delivered by the defibrillator is stored in a capacitor and can be adjusted to fit the situation. SI units of joules are often employed. Less dramatic is the use of capacitors in microelectronics to supply energy when batteries are charged (
 stored in a capacitor is electrostatic potential energy and is thus related to the charge
stored in a capacitor is electrostatic potential energy and is thus related to the charge  , and it is filled with a uniform electrostatic field
, and it is filled with a uniform electrostatic field  in this space is simply
in this space is simply  . We will learn in
. We will learn in 
 .
. . Because
. Because 
 between its plates. Initially, the charge on the plates is
between its plates. Initially, the charge on the plates is  . As the capacitor is being charged, the charge gradually builds up on its plates, and after some time, it reaches the value
. As the capacitor is being charged, the charge gradually builds up on its plates, and after some time, it reaches the value  that must be done on
that must be done on  .
.![\[W=\int_0^W(Q)dW=\int_0^Q\frac{q}{C}dq=\frac{1}{2}\frac{Q^2}{C}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2f14f2762fbbe48e9ba91c0010813f9b_l3.svg "Rendered by QuickLaTeX.com")
 . When the charge is expressed in coulombs, potential is expressed in volts, and the capacitance is expressed in farads, this relation gives the energy in joules.
. When the charge is expressed in coulombs, potential is expressed in volts, and the capacitance is expressed in farads, this relation gives the energy in joules. , we can now find the energy density
, we can now find the energy density ![\[u_E=\frac{U_C}{Ad}=\frac{1}{2}\frac{Q^2}{C}\frac{1}{Ad}=\frac{1}{2}=\frac{Q^2}{\epsilon_0A/d}\frac{1}{Ad}=\frac{1}{2}\frac{1}{\epsilon_0}\left(\frac{Q}{A}\right)^2=\frac{\sigma^2}{2\epsilon_0}=\frac{(E\epsilon_0)^2}{2\epsilon_0}=\frac{\epsilon_0}{2}E^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-228c765d4835f2c4741c68d6c9d88f55_l3.svg "Rendered by QuickLaTeX.com")
 ,
,  , and
, and  stored in capacitors
stored in capacitors  ,
,  ,
, 

![\[U_C=U_1+U_2+U_3=96~\mu\mathrm{J}+64~\mu\mathrm{J}+130~\mu\mathrm{J}=0.29~\mathrm{mJ}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-783c28cee0952e98e810caf7b09b580e_l3.svg "Rendered by QuickLaTeX.com")
 capacitor, which is found to be equivalent to the entire network. The voltage across the network is
capacitor, which is found to be equivalent to the entire network. The voltage across the network is  .
. capacitor is
capacitor is  . (a) What is the energy stored in this capacitor? (b) The potential difference is now increased to
. (a) What is the energy stored in this capacitor? (b) The potential difference is now increased to  . By what factor is the stored energy increased?
. By what factor is the stored energy increased?
 of energy by discharging a capacitor initially at
of energy by discharging a capacitor initially at  What is its capacitance?
What is its capacitance? .
. when there is air between its plates is charged by a battery to voltage
when there is air between its plates is charged by a battery to voltage  then resides on the plates, and the potential difference between the plates is measured to be
then resides on the plates, and the potential difference between the plates is measured to be  (
( ):
):![\[V=\frac{1}{\kappa}V_0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0df2eb49753ac11b9f8285e52ceb6d85_l3.svg "Rendered by QuickLaTeX.com")

 . In other words, we can say that the dielectric constant of the vacuum is
. In other words, we can say that the dielectric constant of the vacuum is 
 . The schematic indicates the sign of the induced charge that is now present on the surfaces of the dielectric material between the plates.
. The schematic indicates the sign of the induced charge that is now present on the surfaces of the dielectric material between the plates.
 , the energy
, the energy 
 capacitor is charged to a potential difference of
capacitor is charged to a potential difference of  . The charging battery is then disconnected, and a piece of Teflon™ with a dielectric constant of
. The charging battery is then disconnected, and a piece of Teflon™ with a dielectric constant of  is inserted to completely fill the space between the capacitor plates (see
is inserted to completely fill the space between the capacitor plates (see  and the original potential difference
and the original potential difference  between the plates. We combine Equation
between the plates. We combine Equation ![\[C=\kappa C_0=2.1(20.0~\mathrm{pF})=42.0~\mathrm{pF}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0955296b4ff4733e5749300f212b7324_l3.svg "Rendered by QuickLaTeX.com")
![\[Q_0=C_0V_0=(20.0~\mathrm{pF})(40.0~\mathrm{V})=0.800~\mathrm{nC}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d62014af3039872a9c8e8cd4aeccd15c_l3.svg "Rendered by QuickLaTeX.com")
 .
.![\[V=\frac{1}{\kappa}V_0=\frac{1}{2.1}40.0~\mathrm{V}=19.0~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c1188322a08d5ef4d09e585e5cc94b27_l3.svg "Rendered by QuickLaTeX.com")
![\[U_0=\frac{1}{2}C_0V_0^2=\frac{1}{2}(20.0~\mathrm{pF})(40.0~\mathrm{V})^2=16.0~\mathrm{nJ}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fc8d208f9c7b259e0915de43eae027ce_l3.svg "Rendered by QuickLaTeX.com")
![\[U=\frac{1}{\kappa}U_0=\frac{1}{2.1}16.0~\mathrm{nJ}=7.6~\mathrm{nJ}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c7c0c0d637bafac7e24d2158422489ec_l3.svg "Rendered by QuickLaTeX.com")
 of its original value. (a) What is the dielectric constant? (b) How does the capacitance change?
of its original value. (a) What is the dielectric constant? (b) How does the capacitance change?
 , the polar molecules align with the external field, as shown in part (b) of the figure. Opposite charges on adjacent dipoles within the volume of dielectric neutralize each other, so there is no net charge within the dielectric (see the dashed circles in part (b)). However, this is not the case very close to the upper and lower surfaces that border the dielectric (the region enclosed by the dashed rectangles in part (b)), where the alignment does produce a net charge. Since the external electrical field merely aligns the dipoles, the dielectric as a whole is neutral, and the surface charges induced on its opposite faces are equal and opposite. These
, the polar molecules align with the external field, as shown in part (b) of the figure. Opposite charges on adjacent dipoles within the volume of dielectric neutralize each other, so there is no net charge within the dielectric (see the dashed circles in part (b)). However, this is not the case very close to the upper and lower surfaces that border the dielectric (the region enclosed by the dashed rectangles in part (b)), where the alignment does produce a net charge. Since the external electrical field merely aligns the dipoles, the dielectric as a whole is neutral, and the surface charges induced on its opposite faces are equal and opposite. These  and
and  produce an additional electrical field
produce an additional electrical field 
 of the dielectric. Note that, in reality, the individual molecules are not perfectly aligned with an external field because of thermal fluctuations; however, the average alignment is along the field lines as shown.
of the dielectric. Note that, in reality, the individual molecules are not perfectly aligned with an external field because of thermal fluctuations; however, the average alignment is along the field lines as shown.
 on the capacitor.
on the capacitor.


 , of the electrical field at which the molecules of an insulator become ionized is called the
, of the electrical field at which the molecules of an insulator become ionized is called the  , so for an air-filled capacitor with a plate separation of
, so for an air-filled capacitor with a plate separation of  the limit on the potential difference that can be safely applied across its plates without causing dielectric breakdown is
the limit on the potential difference that can be safely applied across its plates without causing dielectric breakdown is  .
. when the same capacitor is filled with Teflon™, whose dielectric strength is about
when the same capacitor is filled with Teflon™, whose dielectric strength is about  . Because of this limit imposed by the dielectric strength, the amount of charge that an air-filled capacitor can store is only
. Because of this limit imposed by the dielectric strength, the amount of charge that an air-filled capacitor can store is only  and the charge stored on the same Teflon™-filled capacitor can be as much as
and the charge stored on the same Teflon™-filled capacitor can be as much as
 times greater than a charge stored on an air-filled capacitor. Typical values of dielectric constants and dielectric strengths for various materials are given in
times greater than a charge stored on an air-filled capacitor. Typical values of dielectric constants and dielectric strengths for various materials are given in 
![E_c[\times10^6~\mathrm{V/m}]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6a03885801014f5e14bfacc7871e6ef2_l3.svg "Rendered by QuickLaTeX.com")
 . In a water molecule, electrons are more likely found around the oxygen nucleus than around the hydrogen nuclei. This makes the oxygen end of the molecule slightly negative and leaves the hydrogens end slightly positive, which makes the molecule easy to align along an external electrical field, and thus water has a large dielectric constant. However, the polar nature of water molecules also makes water a good solvent for many substances, which produces undesirable effects, because any concentration of free ions in water conducts electricity.
. In a water molecule, electrons are more likely found around the oxygen nucleus than around the hydrogen nuclei. This makes the oxygen end of the molecule slightly negative and leaves the hydrogens end slightly positive, which makes the molecule easy to align along an external electrical field, and thus water has a large dielectric constant. However, the polar nature of water molecules also makes water a good solvent for many substances, which produces undesirable effects, because any concentration of free ions in water conducts electricity. and the area of each plate is
and the area of each plate is  . Determine: (a) the electrical field between the plates before and after the Teflon™ is inserted, and (b) the surface charge induced on the Teflon™ surfaces.
. Determine: (a) the electrical field between the plates before and after the Teflon™ is inserted, and (b) the surface charge induced on the Teflon™ surfaces. , so to find the electrical fields we use the relation
, so to find the electrical fields we use the relation  and Equation
and Equation  obtained in
obtained in ![\[E_0=\frac{V_0}{d}=\frac{40~\mathrm{V}}{2.0\times10^{-3}~\mathrm{m}}=2.0\times10^4~\mathrm{V/m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3679fabf5eb600d597d3a3906978eac0_l3.svg "Rendered by QuickLaTeX.com")
![\[E=\frac{1}{\kappa}E_0=\frac{1}{2.1}2.0\times10^4~\mathrm{V/m}=9.5\times10^3~\mathrm{V/m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-113e2e63d4fbeaaf822b008e8da04194_l3.svg "Rendered by QuickLaTeX.com")
![\[E=\frac{1}{\epsilon_0}\sigma=\frac{1}{\epsilon_0}\frac{Q_0-Q_i}{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-52aadb8264f7a717282fb3e286ca7671_l3.svg "Rendered by QuickLaTeX.com")


 . Since the battery is always connected to the capacitor plates, the potential difference between them does not change; hence,
. Since the battery is always connected to the capacitor plates, the potential difference between them does not change; hence,  . Because of that, the electrical field in the filled capacitor is the same as the field in the empty capacitor, so we can obtain directly that
. Because of that, the electrical field in the filled capacitor is the same as the field in the empty capacitor, so we can obtain directly that![\[E=\frac{V}{d}=\frac{V_0}{d}=E_0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-35cdc8555faaa7492885f3b30cd5bcbd_l3.svg "Rendered by QuickLaTeX.com")
![\[Q=CV=(\kappa C_0)V_0=\kappa(C_0V_0)=\kappa Q_0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-dd9463be1b9fdcc035b0430b5164ea4e_l3.svg "Rendered by QuickLaTeX.com")
 (
( , we have
, we have![\[\frac{Q-Q_i}{\epsilon_0A}=\frac{Q_0}{\epsilon_0A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bc35da2e59ba794b1f4ae65abc50fde3_l3.svg "Rendered by QuickLaTeX.com")
![\[Q_i=Q-Q_0=\kappa Q_0-Q_0=(\kappa-1)Q_0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d0e16c27a19652468f7e9e5e5e639336_l3.svg "Rendered by QuickLaTeX.com")
 (larger than the energy
(larger than the energy  found previously for an isolated, charged capacitor.
found previously for an isolated, charged capacitor.















 b.
b. 



 b.
b. 


 b.
b.  times
times b.
b. 

 b.
b. 
 c.
c.  d.
d. 

 capacitors? What is the minimum capacitance?
capacitors? What is the minimum capacitance? )
) capacitor when
capacitor when  is applied to it?
is applied to it? is applied to an
is applied to an  capacitor.
capacitor. capacitor when it holds
capacitor when it holds  of charge.
of charge. capacitor to store
capacitor to store  of charge?
of charge? of charge at a voltage of
of charge at a voltage of  ?
? of charge at a voltage of
of charge at a voltage of  ?
? are
are  vacuum capacitor has a plate area of
vacuum capacitor has a plate area of  What is the separation between its plates?
What is the separation between its plates? and calculate its capacitance.
and calculate its capacitance. what is the ratio of the radii of the two cylinders?
what is the ratio of the radii of the two cylinders? How much charge must leak off its plates before the voltage across them is reduced by
How much charge must leak off its plates before the voltage across them is reduced by  is connected in series with an
is connected in series with an  potential difference is applied across the pair. (a) What is the charge on each capacitor? (b) What is the voltage across each capacitor?
potential difference is applied across the pair. (a) What is the charge on each capacitor? (b) What is the voltage across each capacitor?
 and
and  respectively, are connected in parallel. A 500-V potential difference is applied across the combination. Determine the voltage across each capacitor and the charge on each capacitor.
respectively, are connected in parallel. A 500-V potential difference is applied across the combination. Determine the voltage across each capacitor and the charge on each capacitor. but you have only
but you have only  capacitors at your disposal. What is the smallest number of capacitors you could connect together to achieve your goal, and how would you connect them?
capacitors at your disposal. What is the smallest number of capacitors you could connect together to achieve your goal, and how would you connect them? and a
and a  capacitor?
capacitor? capacitor is charged to a potential difference of
capacitor is charged to a potential difference of  Its terminals are then connected to those of an uncharged
Its terminals are then connected to those of an uncharged  capacitor. Calculate: (a) the original charge on the
capacitor. Calculate: (a) the original charge on the  capacitor and a
capacitor and a  potential. The charged capacitors are then disconnected from the source and connected to each other with terminals of like sign together. Find the charge on each capacitor and the voltage across each capacitor.
potential. The charged capacitors are then disconnected from the source and connected to each other with terminals of like sign together. Find the charge on each capacitor and the voltage across each capacitor. capacitor whose plates are at a potential difference of
capacitor whose plates are at a potential difference of  when connected to a
when connected to a  battery. How much energy is stored in this capacitor?
battery. How much energy is stored in this capacitor? potential?
potential? capacitor of a heart defibrillator charged to
capacitor of a heart defibrillator charged to  ? (b) Find the amount of the stored charge.
? (b) Find the amount of the stored charge. of energy? (b) Find the amount of the stored charge.
of energy? (b) Find the amount of the stored charge. capacitor is used in conjunction with a dc motor. How much energy is stored in it when
capacitor is used in conjunction with a dc motor. How much energy is stored in it when  is applied?
is applied? battery, a
battery, a  capacitor. (a) Find the charge and energy stored if the capacitors are connected to the battery in series. (b) Do the same for a parallel connection.
capacitor. (a) Find the charge and energy stored if the capacitors are connected to the battery in series. (b) Do the same for a parallel connection. and are
and are  apart? (b) What is the voltage between them if opposite charges of magnitude
apart? (b) What is the voltage between them if opposite charges of magnitude  are placed on them? (c) To show that this voltage poses a small hazard, calculate the energy stored. (d) The actual shelves have an area
are placed on them? (c) To show that this voltage poses a small hazard, calculate the energy stored. (d) The actual shelves have an area  on a side and
on a side and  battery. With the battery still connected, the plates are pulled apart to a separation of
battery. With the battery still connected, the plates are pulled apart to a separation of  to
to  by turning a dial, connected to one set of plates by a shaft, from
by turning a dial, connected to one set of plates by a shaft, from  With the dial set at
With the dial set at  (corresponding to
(corresponding to  ), the capacitor is connected to a
), the capacitor is connected to a  source. After charging, the capacitor is disconnected from the source, and the dial is turned to
source. After charging, the capacitor is disconnected from the source, and the dial is turned to  If friction is negligible, how much work is required to turn the dial from
If friction is negligible, how much work is required to turn the dial from  (a) What is the capacitance of this set of plates? (b) If the region between the plates is filled with a material whose dielectric constant is
(a) What is the capacitance of this set of plates? (b) If the region between the plates is filled with a material whose dielectric constant is  what is the new capacitance?
what is the new capacitance? the other with radius
the other with radius  (a) What is the capacitance of this set of conductors? (b) If the region between the conductors is filled with a material whose dielectric constant is
(a) What is the capacitance of this set of conductors? (b) If the region between the conductors is filled with a material whose dielectric constant is  what is the capacitance of the system?
what is the capacitance of the system? on each plate and capacitance
on each plate and capacitance  is inserted between the plates, completely filling the volume between the plates. (a) What is the potential difference between the plates of the capacitor, before and after the dielectric has been inserted? (b) What is the electrical field at the point midway between the plates before and after the dielectric is inserted?
is inserted between the plates, completely filling the volume between the plates. (a) What is the potential difference between the plates of the capacitor, before and after the dielectric has been inserted? (b) What is the electrical field at the point midway between the plates before and after the dielectric is inserted? the cell wall is
the cell wall is  thick, and the cell wall material has a dielectric constant of
thick, and the cell wall material has a dielectric constant of  (a) Find the magnitude of the electric field in the wall between two charge layers. (b) Find the potential difference between the inside and the outside of the cell. Which is at higher potential? (c) A typical cell in the human body has volume
(a) Find the magnitude of the electric field in the wall between two charge layers. (b) Find the potential difference between the inside and the outside of the cell. Which is at higher potential? (c) A typical cell in the human body has volume  Estimate the total electrical field energy stored in the wall of a cell of this size when assuming that the cell is spherical. (Hint: Calculate the volume of the cell wall.)
Estimate the total electrical field energy stored in the wall of a cell of this size when assuming that the cell is spherical. (Hint: Calculate the volume of the cell wall.) when placed across the capacitor. When a dielectric is inserted between the plates, completely filling the space, the voltmeter reads
when placed across the capacitor. When a dielectric is inserted between the plates, completely filling the space, the voltmeter reads  . What is the dielectric constant of the material? (b) What will the voltmeter read if the dielectric is now pulled away out so it fills only one-third of the space between the plates?
. What is the dielectric constant of the material? (b) What will the voltmeter read if the dielectric is now pulled away out so it fills only one-third of the space between the plates? thick with a dielectric constant of
thick with a dielectric constant of  If the electrical field in the dielectric is
If the electrical field in the dielectric is  what are (a) the charge density on the capacitor plates, and (b) the induced charge density on the surfaces of the dielectric?
what are (a) the charge density on the capacitor plates, and (b) the induced charge density on the surfaces of the dielectric? and the spacing between the plates is
and the spacing between the plates is  If the capacitor is connected to a
If the capacitor is connected to a  battery, find (a) the free charge on the capacitor plates, (b) the electrical field in the dielectric, and (c) the induced charge on the dielectric surfaces.
battery, find (a) the free charge on the capacitor plates, (b) the electrical field in the dielectric, and (c) the induced charge on the dielectric surfaces. and separated by
and separated by  of Teflon™.
of Teflon™. that are separated by
that are separated by  of neoprene rubber? (b) What charge does it hold when
of neoprene rubber? (b) What charge does it hold when  When the space is filled with dielectric, the electrical field is
When the space is filled with dielectric, the electrical field is  (a) What is the surface charge density on each surface of the dielectric? (b) What is the dielectric constant?
(a) What is the surface charge density on each surface of the dielectric? (b) What is the dielectric constant? and a dielectric strength of
and a dielectric strength of  The capacitor has to have a capacitance of
The capacitor has to have a capacitance of  and must be able to withstand a maximum potential difference
and must be able to withstand a maximum potential difference  What is the minimum area the plates of the capacitor may have?
What is the minimum area the plates of the capacitor may have? air capacitor is connected to a power supply, the energy stored in the capacitor is
air capacitor is connected to a power supply, the energy stored in the capacitor is  While the capacitor is connected to the power supply, a slab of dielectric is inserted that completely fills the space between the plates. This increases the stored energy by
While the capacitor is connected to the power supply, a slab of dielectric is inserted that completely fills the space between the plates. This increases the stored energy by  (a) What is the potential difference between the capacitor plates? (b) What is the dielectric constant of the slab?
(a) What is the potential difference between the capacitor plates? (b) What is the dielectric constant of the slab? apart. The space between the plates is completely filled with two square slabs of dielectric, each
apart. The space between the plates is completely filled with two square slabs of dielectric, each  thick. One slab is Pyrex glass and the other slab is polystyrene. If the potential difference between the plates is
thick. One slab is Pyrex glass and the other slab is polystyrene. If the potential difference between the plates is  find how much electrical energy can be stored in this capacitor.
find how much electrical energy can be stored in this capacitor. apart. When a charge of
apart. When a charge of  is placed on the plates the potential difference between them is
is placed on the plates the potential difference between them is  . (a) What is the capacitance of the plates? (b) What is the area of each plate? (c) What is the charge on the plates when the potential difference between them is
. (a) What is the capacitance of the plates? (b) What is the area of each plate? (c) What is the charge on the plates when the potential difference between them is  battery and fully charged. It is then disconnected from the battery and its plates are pulled apart to a separation of
battery and fully charged. It is then disconnected from the battery and its plates are pulled apart to a separation of  (a) What is the capacitance of this new capacitor? (b) What is the charge on each plate? (c) What is the electrical field between the plates?
(a) What is the capacitance of this new capacitor? (b) What is the charge on each plate? (c) What is the electrical field between the plates? The potential difference between Earth’s surface and the ionosphere is about
The potential difference between Earth’s surface and the ionosphere is about  (a) Calculate the capacitance of this system. (b) Find the total charge on this capacitor. (c) Find the energy stored in this system.
(a) Calculate the capacitance of this system. (b) Find the total charge on this capacitor. (c) Find the energy stored in this system. capacitor and a
capacitor and a  capacitor are connected in parallel across a
capacitor are connected in parallel across a  supply line. (a) Find the charge on each capacitor and voltage across each. (b) The charged capacitors are disconnected from the line and from each other. They are then reconnected to each other with terminals of unlike sign together. Find the final charge on each capacitor and the voltage across each.
supply line. (a) Find the charge on each capacitor and voltage across each. (b) The charged capacitors are disconnected from the line and from each other. They are then reconnected to each other with terminals of unlike sign together. Find the final charge on each capacitor and the voltage across each.
 respectively, are connected in series across a
respectively, are connected in series across a  potential difference. (a) What is the charge on the
potential difference. (a) What is the charge on the  capacitor? (b) The capacitors are disconnected from the potential difference without allowing them to discharge. They are then reconnected in parallel with each other with the positively charged plates connected together. What is the voltage across each capacitor in the parallel combination?
capacitor? (b) The capacitors are disconnected from the potential difference without allowing them to discharge. They are then reconnected in parallel with each other with the positively charged plates connected together. What is the voltage across each capacitor in the parallel combination?

 are connected in series across a
are connected in series across a  What is the capacitance of the second capacitor? (b) What is unreasonable about this result? (c) Which assumptions are unreasonable or inconsistent?
What is the capacitance of the second capacitor? (b) What is unreasonable about this result? (c) Which assumptions are unreasonable or inconsistent? of electrical energy to start a truck’s engine. Calculate the capacitance of a capacitor that could store that amount of energy at
of electrical energy to start a truck’s engine. Calculate the capacitance of a capacitor that could store that amount of energy at  (b) What is unreasonable about this result? (c) Which assumptions are responsible?
(b) What is unreasonable about this result? (c) Which assumptions are responsible? separated by
separated by  of nylon, and stores
of nylon, and stores  of charge. What is the applied voltage? (b) What is unreasonable about this result? (c) Which assumptions are responsible or inconsistent?
of charge. What is the applied voltage? (b) What is unreasonable about this result? (c) Which assumptions are responsible or inconsistent? capacitor and then tosses it to an unsuspecting victim. The victim’s finger is burned by the discharge of the capacitor through
capacitor and then tosses it to an unsuspecting victim. The victim’s finger is burned by the discharge of the capacitor through  of flesh. Estimate, what is the temperature increase of the flesh? Is it reasonable to assume that no thermodynamic phase change happened?
of flesh. Estimate, what is the temperature increase of the flesh? Is it reasonable to assume that no thermodynamic phase change happened? A potential difference of
A potential difference of  just outside the inner sphere? (c) What is the magnitude of the electrical field at
just outside the inner sphere? (c) What is the magnitude of the electrical field at  just inside the outer sphere? (d) For a parallel-plate capacitor the electrical field is uniform in the region between the plates, except near the edges of the plates. Is this also true for a spherical capacitor?
just inside the outer sphere? (d) For a parallel-plate capacitor the electrical field is uniform in the region between the plates, except near the edges of the plates. Is this also true for a spherical capacitor? potential is applied between points
potential is applied between points  ? (b) What is the potential at point
? (b) What is the potential at point  fraction of a second with an average light power output of
fraction of a second with an average light power output of  (a) If the conversion of electrical energy to light is
(a) If the conversion of electrical energy to light is  efficient (because the rest of the energy goes to thermal energy), how much energy must be stored in the capacitor for one flash? (b) The capacitor has a potential difference between its plates of
efficient (because the rest of the energy goes to thermal energy), how much energy must be stored in the capacitor for one flash? (b) The capacitor has a potential difference between its plates of  when the stored energy equals the value stored in part (a). What is the capacitance?
when the stored energy equals the value stored in part (a). What is the capacitance? just inside the outer sphere? (c) For the parallel-plate capacitor the energy density is uniform in the region between the plates, except near the edges of the plates. Is this also true for the spherical capacitor?
just inside the outer sphere? (c) For the parallel-plate capacitor the energy density is uniform in the region between the plates, except near the edges of the plates. Is this also true for the spherical capacitor? is held in place between two capacitor plates by plastic pegs, as shown below. The effect of the pegs on the capacitance is negligible. The area of each capacitor plate and the area of the top and bottom surfaces of the inserted plate are all
is held in place between two capacitor plates by plastic pegs, as shown below. The effect of the pegs on the capacitance is negligible. The area of each capacitor plate and the area of the top and bottom surfaces of the inserted plate are all  What is the capacitance of this system?
What is the capacitance of this system? show that the capacitance is given by
show that the capacitance is given by 

 separated by
separated by  The space between the plates is filled with polystyrene. (a) Find the maximum permissible voltage across the capacitor to avoid dielectric breakdown. (b) When the voltage equals the value found in part (a), find the surface charge density on the surface of the dielectric.
The space between the plates is filled with polystyrene. (a) Find the maximum permissible voltage across the capacitor to avoid dielectric breakdown. (b) When the voltage equals the value found in part (a), find the surface charge density on the surface of the dielectric.
 times stronger than the strongest conventional electromagnets. These superconducting magnets are used in the construction of magnetic resonance imaging (MRI) devices that can be used to make high-resolution images of the human body. The chapter-opening picture shows an MRI image of the vertebrae of a human subject and the MRI device itself. Superconducting magnets have many other uses. For example, superconducting magnets are used in the Large Hadron Collider (LHC) to curve the path of protons in the ring.
times stronger than the strongest conventional electromagnets. These superconducting magnets are used in the construction of magnetic resonance imaging (MRI) devices that can be used to make high-resolution images of the human body. The chapter-opening picture shows an MRI image of the vertebrae of a human subject and the MRI device itself. Superconducting magnets have many other uses. For example, superconducting magnets are used in the Large Hadron Collider (LHC) to curve the path of protons in the ring. is the rate at which charge flows,
is the rate at which charge flows,


 ,
,
 :
:

 electrons flowing through the area
electrons flowing through the area  of charge in
of charge in  while starting an engine? (b) How long does it take
while starting an engine? (b) How long does it take ![\[I=\frac{\Delta Q}{\Delta t}=\frac{720~\mathrm{C}}{4.00~\mathrm{s}}=180~\mathrm{C/s}=180~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f1fc2fa8c3282ac3d44a187aba152e7b_l3.svg "Rendered by QuickLaTeX.com")
![\[\Delta t=\frac{\Delta Q}{I}=\frac{1.00~\mathrm{C}}{180~\mathrm{C/s}}=5.56\times10^{-3}~\mathrm{s}=5.56~\mathrm{ms}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fdf48576165ef5ff287a3246605e2e14_l3.svg "Rendered by QuickLaTeX.com")
 . Here,
. Here,  is the charge after a long period of time, as time approaches infinity, with units of coulombs, and
is the charge after a long period of time, as time approaches infinity, with units of coulombs, and  is a time constant with units of seconds (see
is a time constant with units of seconds (see 
 . Notice from the figure that the charge increases to
. Notice from the figure that the charge increases to  .
.![\[I=\frac{dQ}{dt}=\frac{d}{dt}[Q_M(1-e^{-t/\tau})]=\frac{Q_M}{\tau}e^{-t/\tau}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-17a502f6d2bf2cae804b8ba8b206b58d_l3.svg "Rendered by QuickLaTeX.com")

 . How long would it take for
. How long would it take for  to
to  , and are used to protect the residents from harm and their appliances from damage due to large currents. A single
, and are used to protect the residents from harm and their appliances from damage due to large currents. A single  circuit breaker may be used to protect several outlets in the living room, whereas a single
circuit breaker may be used to protect several outlets in the living room, whereas a single  circuit breaker may be used to protect the refrigerator in the kitchen. What can you deduce from this about current used by the various appliances?
circuit breaker may be used to protect the refrigerator in the kitchen. What can you deduce from this about current used by the various appliances?

 , a significant fraction of the speed of light. Interestingly, the individual charges that make up the current move much slower on average, typically drifting at speeds on the order of
, a significant fraction of the speed of light. Interestingly, the individual charges that make up the current move much slower on average, typically drifting at speeds on the order of  . How do we reconcile these two speeds, and what does it tell us about standard conductors?
. How do we reconcile these two speeds, and what does it tell us about standard conductors?
 is the average velocity of the free charges. Drift velocity is quite small, since there are so many free charges. If we have an estimate of the density of free electrons in a conductor, we can calculate the drift velocity for a given current. The larger the density, the lower the velocity required for a given current.
is the average velocity of the free charges. Drift velocity is quite small, since there are so many free charges. If we have an estimate of the density of free electrons in a conductor, we can calculate the drift velocity for a given current. The larger the density, the lower the velocity required for a given current.

 where
where  . The value of
. The value of  , so that the number of free charges in the volume is
, so that the number of free charges in the volume is  . The charge
. The charge  in this segment is thus
in this segment is thus  where
where  .) Current is charge moved per unit time; thus, if all the original charges move out of this segment in time
.) Current is charge moved per unit time; thus, if all the original charges move out of this segment in time  , the current is
, the current is![\[I=\frac{dQ}{dt}=qnAv_{\mathrm{d}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e1119a4b4b2d9ccbcc8d3686164f901c_l3.svg "Rendered by QuickLaTeX.com")

 is the drift velocity,
is the drift velocity, 
 (
( diameter) to
diameter) to  (
( diameter) wire. A device used to measure the gauge of wire is shown in
diameter) wire. A device used to measure the gauge of wire is shown in 
 (
( ) carrying a
) carrying a  current, given that there is one free electron per copper atom. (Household wiring often contains
current, given that there is one free electron per copper atom. (Household wiring often contains .) The density of copper is
.) The density of copper is  and the atomic mass of copper is
and the atomic mass of copper is  .
. . The current is
. The current is  and
and  is the charge of an electron. We can calculate the area of a cross-section of the wire using the formula
is the charge of an electron. We can calculate the area of a cross-section of the wire using the formula  where
where  . We are given the density of copper,
. We are given the density of copper,  , and the atomic mass of copper is
, and the atomic mass of copper is  , to determine
, to determine  . We can now find
. We can now find 
![\[A=\pi r^2=\pi\left(\frac{2.05\times10^{-3}~\mathrm{m}}{2}\right)^2=3.30\times10^{-6}~\mathrm{m}^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-012d43f48b05639b65e0fda2ef5d8de5_l3.svg "Rendered by QuickLaTeX.com")

 times faster (about
times faster (about  diameter (
diameter ( diameter (
diameter ( , a vector quantity. The
, a vector quantity. The  is found as
is found as![\[dI=\vec{\mathbf{J}}\cdot d\vec{\mathbf{A}}=JdA\cos\theta,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e4c75c81f2bddee741c09219200d9696_l3.svg "Rendered by QuickLaTeX.com")

![\[J=\frac{I}{A}=\frac{n|q|Av_{\mathrm{d}}}{A}=n|q|v_{\mathrm{d}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d5cb3e522ec4c1f7ed37d3ca701032f2_l3.svg "Rendered by QuickLaTeX.com")
 . If
. If 
 light bulb is
light bulb is  . The lamp is wired using a copper wire with diameter
. The lamp is wired using a copper wire with diameter  (
( . The current is given as
. The current is given as  .
. and the area, found to be
and the area, found to be ![\[J=\frac{I}{A}=\frac{0.87~\mathrm{A}}{5.26\times10^{-6}~\mathrm{m}^2}=1.65\times10^5~\frac{\mathrm{A}}{\mathrm{m}^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1887112b20d32ab9740ec7424f6f2275_l3.svg "Rendered by QuickLaTeX.com")
![\[\vec{\mathbf{J}}=\sigma\vec{\mathbf{E}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-153e8a88b5be6c960ebee1a77a38b6a4_l3.svg "Rendered by QuickLaTeX.com")
 , the units are
, the units are![\[\sigma=\frac{[J]}{[E]}=\frac{\mathrm{A/m}^2}{\mathrm{V/m}}=\frac{\mathrm{A}}{\mathrm{V}\cdot\mathrm{m}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e8d91b1ebe4d57836e44f1efbf1ddf97_l3.svg "Rendered by QuickLaTeX.com")
 . The unit is named after Georg Simon Ohm, whom we will discuss later in this chapter. The
. The unit is named after Georg Simon Ohm, whom we will discuss later in this chapter. The  . The units of electrical conductivity are therefore
. The units of electrical conductivity are therefore  .
.![\[\rho=\frac{1}{\sigma}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f8fbffdbe93e3dedafcde7efef9dd92c_l3.svg "Rendered by QuickLaTeX.com")
 . We can define the resistivity in terms of the electrical field and the current density,
. We can define the resistivity in terms of the electrical field and the current density,

































































 length of copper wire with a diameter of
length of copper wire with a diameter of  .
. , and the definition of current density
, and the definition of current density  , the area, and the resistivity of copper
, the area, and the resistivity of copper  , where
, where  . The resistivity and current density can be used to find the electrical field.
. The resistivity and current density can be used to find the electrical field.![\[J=\frac{I}{A}=\frac{10\times10^{-3}~\mathrm{A}}{3.31\times10^{-6}~\mathrm{m}^2}=3.02\times10^3~\mathrm{A/m}^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fc17245a8d69ebafd96d3224e99c7f64_l3.svg "Rendered by QuickLaTeX.com")
![\[R=\rho\frac{L}{A}=(1.68\times10^{-8}~\Omega\cdot\mathrm{m})\frac{5.00~\mathrm{m}}{3.31\times10^{-6}~\mathrm{m}^2}=0.025~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-429330a92bb7894230037b6a559a4049_l3.svg "Rendered by QuickLaTeX.com")
![\[E=\rho J=(1.68\times10^{-8}~\Omega\cdot\mathrm{m})\left(3.02\times10^3~\mathrm{A/m}^2\right)=5.07\times10^{-5}~\mathrm{V/m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d13f4dae8c6dd66f47a865e0e585fb0b_l3.svg "Rendered by QuickLaTeX.com")
 . A third important characteristic is ductility. Ductility is a measure of a material’s ability to be drawn into wires and a measure of the flexibility of the material, and copper has a high ductility. Summarizing, for a conductor to be a suitable candidate for making wire, there are at least three important characteristics: low resistivity, high tensile strength, and high ductility. What other materials are used for wiring and what are the advantages and disadvantages?
. A third important characteristic is ductility. Ductility is a measure of a material’s ability to be drawn into wires and a measure of the flexibility of the material, and copper has a high ductility. Summarizing, for a conductor to be a suitable candidate for making wire, there are at least three important characteristics: low resistivity, high tensile strength, and high ductility. What other materials are used for wiring and what are the advantages and disadvantages?![\begin{equation*}\rho\approx\rho_0[1+\alpha(T-T_0)],\end{equation*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b4daaa272bc9533736736cde9f73d427_l3.svg "Rendered by QuickLaTeX.com")
 ,
,  , usually taken as
, usually taken as  .
. .
.
 , and the magnitude of the current density is equal to the current divided by the cross-sectional area,
, and the magnitude of the current density is equal to the current divided by the cross-sectional area,  . Using this information and recalling that the electrical field is proportional to the resistivity and the current density, we can see that the voltage is proportional to the current:
. Using this information and recalling that the electrical field is proportional to the resistivity and the current density, we can see that the voltage is proportional to the current:





 .
. or more. A dry person may have a hand-to-foot resistance of
or more. A dry person may have a hand-to-foot resistance of  , whereas the resistance of the human heart is about
, whereas the resistance of the human heart is about  . A meter-long piece of large-diameter copper wire may have a resistance of
. A meter-long piece of large-diameter copper wire may have a resistance of  , and superconductors have no resistance at all at low temperatures. As we have seen, resistance is related to the shape of an object and the material of which it is composed.
, and superconductors have no resistance at all at low temperatures. As we have seen, resistance is related to the shape of an object and the material of which it is composed. is directly proportional to
is directly proportional to 
 ) and
) and  . The color code gives the resistance of the resistor at a temperature of
. The color code gives the resistance of the resistor at a temperature of  .
.
 and
and  for temperature changes greater than
for temperature changes greater than  , for tungsten, the equations work reasonably well for very large temperature changes. A tungsten filament at
, for tungsten, the equations work reasonably well for very large temperature changes. A tungsten filament at  . What would the resistance be if the temperature is increased to
. What would the resistance be if the temperature is increased to  ?
? and the temperature change is
and the temperature change is  .
.![\[R=R_0(1+\alpha\Delta T)=(0.350~\Omega)\left[1+\left(4.5\times10^{-3}~(^{\circ}\mathrm{C})^{-1}\right)(2850~^{\circ}\mathrm{C})\right]=4.8~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1ef51da0e1e5912709061c1e47bf760e_l3.svg "Rendered by QuickLaTeX.com")
 surrounded by a second, outer concentric conductor with radius
surrounded by a second, outer concentric conductor with radius  (
(
 , and integrate.
, and integrate. and then integrate from
and then integrate from 
![\[I\propto V.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-39eda5abe7b183e933fc042042f1ab87_l3.svg "Rendered by QuickLaTeX.com")


 to
to  , increased by
, increased by  increments. A plot shows values of the voltage versus the current typical of what a casual experimenter might find.
increments. A plot shows values of the voltage versus the current typical of what a casual experimenter might find. to
to 
 . (a) What is the resistance of the resistor measured in ohms? (b) If the temperature of the resistor is increased to
. (a) What is the resistance of the resistor measured in ohms? (b) If the temperature of the resistor is increased to  by heating the resistor, what is the current through the resistor?
by heating the resistor, what is the current through the resistor? , so the resistance can be found using
, so the resistance can be found using  .
. .
.![\[R=\frac{V}{I}=\frac{9.00~\mathrm{V}}{3.00\times10^{-3}~\mathrm{A}}=3.00\times10^{3}~\Omega=3.00~\mathrm{k}\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-355c6b6a8e4628d15c7b03d16bb78734_l3.svg "Rendered by QuickLaTeX.com")
 .
.![\[R=R_0(1+\alpha\Delta T)=3.00~\mathrm{k}\Omega(1-0.0005~(^{\circ}\mathrm{C})^{-1}(60~^{\circ}\mathrm{C}-20~^{\circ}\mathrm{C}))=2.94~\mathrm{k}\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4e8039c03fea6e78e51e850c2a3bd174_l3.svg "Rendered by QuickLaTeX.com")
![\[I=\frac{V}{R}=\frac{9.00~\mathrm{V}}{2.94\times10^{3}~\Omega}=3.06\times10^{-3}~\mathrm{A}=3.06~\mathrm{mA}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6c5fdd1981a11f789c8351160195ce3d_l3.svg "Rendered by QuickLaTeX.com")
 resulted in a
resulted in a  . If a resistor is connected across this voltage, will Ohm’s law
. If a resistor is connected across this voltage, will Ohm’s law 
 . The resistance of the diode is close to zero. (This is the reason for the resistor in the circuit; if it were not there, the current would become very large.) You can see from the graph in
. The resistance of the diode is close to zero. (This is the reason for the resistor in the circuit; if it were not there, the current would become very large.) You can see from the graph in 
 comes from the drift velocity of the free electrons in the metal that results from an applied electrical field. As stated earlier, the current density is proportional to the applied electrical field. The reformulation of Ohm’s law is credited to Gustav Kirchhoff, whose name we will see again in the next chapter.
comes from the drift velocity of the free electrons in the metal that results from an applied electrical field. As stated earlier, the current density is proportional to the applied electrical field. The reformulation of Ohm’s law is credited to Gustav Kirchhoff, whose name we will see again in the next chapter. bulb with a
bulb with a  bulb (
bulb (
 to
to  the input power. (credit a: modification of works by “Dickbauch”/Wikimedia Commons and Greg Westfall; credit b: modification of work by “dbgg1979”/Flickr)
the input power. (credit a: modification of works by “Dickbauch”/Wikimedia Commons and Greg Westfall; credit b: modification of work by “dbgg1979”/Flickr) . As discussed in
. As discussed in  , and the charge
, and the charge 
 . This force is necessary to keep the charge moving. This force does not act to accelerate the charge through the entire distance
. This force is necessary to keep the charge moving. This force does not act to accelerate the charge through the entire distance  because of the interactions of the charge with atoms and free electrons in the material. The speed, and therefore the kinetic energy, of the charge do not increase during the entire trip across
because of the interactions of the charge with atoms and free electrons in the material. The speed, and therefore the kinetic energy, of the charge do not increase during the entire trip across  as the charge that passes through area
as the charge that passes through area ![\[E=-\frac{(V_2-V_1)}{\Delta L}=\frac{V}{\Delta L}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fff3c6c708561c714e6415cc4b4ba613_l3.svg "Rendered by QuickLaTeX.com")
![\[W=F\Delta L=(\Delta QE)\Delta L=\left(\Delta Q\frac{V}{\Delta L}\Delta L=\Delta QV=\Delta U.\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8ce9d672917895eb3de5439dd370e6b6_l3.svg "Rendered by QuickLaTeX.com")
![\[P=\frac{\Delta U}{\Delta t}=-\frac{\Delta AV}{\Delta t}=IV.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c42f5e5b03df3c3d92150cecc652b8cd_l3.svg "Rendered by QuickLaTeX.com")
![\[P=IV=I(IR)=I^2R~~~~~\mathrm{or}~~~~~P=IV=\left(\frac{V}{R}\right)V=\frac{V^2}{R}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2127c135f47a56dc6dbbc9e1ce4af054_l3.svg "Rendered by QuickLaTeX.com")
 The power supplied from the battery is equal to current times the voltage,
The power supplied from the battery is equal to current times the voltage,  .
.

 implies that the lower the resistance connected to a given voltage source, the greater the power delivered. Furthermore, since voltage is squared in
implies that the lower the resistance connected to a given voltage source, the greater the power delivered. Furthermore, since voltage is squared in  , burning it out. If the bulb’s resistance remained constant, its power would be exactly
, burning it out. If the bulb’s resistance remained constant, its power would be exactly  . When the motor is running at its maximum power, it can lift an object with a weight of
. When the motor is running at its maximum power, it can lift an object with a weight of  a distance of
a distance of  , in
, in  , at a constant speed. (a) What is the power consumed by the motor? (b) What is the power used in lifting the object? Ignore air resistance. (c) Assuming that the difference in the power consumed by the motor and the power used lifting the object are dissipated as heat by the resistance of the motor, estimate the resistance of the motor?
, at a constant speed. (a) What is the power consumed by the motor? (b) What is the power used in lifting the object? Ignore air resistance. (c) Assuming that the difference in the power consumed by the motor and the power used lifting the object are dissipated as heat by the resistance of the motor, estimate the resistance of the motor? , where the speed is the distance divided by the time. The upward force supplied by the motor is equal to the weight of the object because the acceleration is constant. (c) The resistance of the motor can be found using
, where the speed is the distance divided by the time. The upward force supplied by the motor is equal to the weight of the object because the acceleration is constant. (c) The resistance of the motor can be found using 
![\[P=IV=(20.0~\mathrm{A})(115~\mathrm{V})=2.30\times10^{3}~\mathrm{W}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7558a7de835f4cdfe17d384cccd06e0d_l3.svg "Rendered by QuickLaTeX.com")
 ) and the magnitude of the velocity is
) and the magnitude of the velocity is  ,
,![\[P=Fv=(4.90\times10^3~\mathrm{N})(0.333~\mathrm{m/s})=1.63\times10^{3}~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-14ee0aa273349ad38be97cb716cebb8d_l3.svg "Rendered by QuickLaTeX.com")
 and the resistance can be found using
and the resistance can be found using ![\[R=\frac{P}{I^2}=\frac{0.67\times10^{3}~\mathrm{W}}{(20.0~\mathrm{A})^2}=1.7~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-80fa0e5ddde8b9c9ec81c0b326210f97_l3.svg "Rendered by QuickLaTeX.com")
 motor can have an efficiency of
motor can have an efficiency of  and a
and a  motor can have an efficiency of
motor can have an efficiency of  . Why is it important to use high-performance motors?
. Why is it important to use high-performance motors?
 , we see that
, we see that![\[E=\int Pdt\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-11083dfb6adad12e3f20ebc0c30c6af9_l3.svg "Rendered by QuickLaTeX.com")
 . For example, the more light bulbs burning, the greater
. For example, the more light bulbs burning, the greater  , consistent with the relationship
, consistent with the relationship  .
. of a home’s use of energy goes to lighting, and the number for commercial establishments is closer to
of a home’s use of energy goes to lighting, and the number for commercial establishments is closer to  . Fluorescent lights are about four times more efficient than incandescent lights—this is true for both the long tubes and the compact fluorescent lights (CFLs). (See
. Fluorescent lights are about four times more efficient than incandescent lights—this is true for both the long tubes and the compact fluorescent lights (CFLs). (See  CFL, which has the same brightness and colour. CFLs have a bent tube inside a globe or a spiral-shaped tube, all connected to a standard screw-in base that fits standard incandescent light sockets. (Original problems with colour, flicker, shape, and high initial investment for CFLs have been addressed in recent years.)
CFL, which has the same brightness and colour. CFLs have a bent tube inside a globe or a spiral-shaped tube, all connected to a standard screw-in base that fits standard incandescent light sockets. (Original problems with colour, flicker, shape, and high initial investment for CFLs have been addressed in recent years.) LED bulb. The
LED bulb. The  per kilowatt-hour is the average energy rate charged by the power company? Assume that the bulb is turned on for three hours a day.
per kilowatt-hour is the average energy rate charged by the power company? Assume that the bulb is turned on for three hours a day.

 over the incandescent bulb for one year. The LED bulb can cost
over the incandescent bulb for one year. The LED bulb can cost  and the
and the  , which should be factored into the computation. A typical lifespan of an incandescent bulb is
, which should be factored into the computation. A typical lifespan of an incandescent bulb is  hours and is
hours and is  hours for the LED bulb. The incandescent bulb would last
hours for the LED bulb. The incandescent bulb would last  years at
years at  years. The initial cost of the LED bulb is high, but the cost to the home owner will be
years. The initial cost of the LED bulb is high, but the cost to the home owner will be  for the incandescent bulbs versus
for the incandescent bulbs versus  for the LED bulbs per year. (Note that the LED bulbs are coming down in price.) The cost savings per year is approximately
for the LED bulbs per year. (Note that the LED bulbs are coming down in price.) The cost savings per year is approximately  , and that is just for one bulb.
, and that is just for one bulb. ) is the SI-derived unit of luminous flux and is a measure of the total quantity of visible light emitted by a source. A
) is the SI-derived unit of luminous flux and is a measure of the total quantity of visible light emitted by a source. A  to
to  to
to  LED bulb, all three of which have a light output of approximately
LED bulb, all three of which have a light output of approximately  . A table of light output for some commonly used light bulbs appears in
. A table of light output for some commonly used light bulbs appears in  hours and the incandescent lasts a mere
hours and the incandescent lasts a mere  for the
for the  for the
for the  for the CFL bulb. As mentioned earlier, a major drawback of the CFL bulb is that it contains mercury, a neurotoxin, and must be disposed of as hazardous waste. From these data, it is easy to understand why the LED light bulb is quickly becoming the standard in lighting.
for the CFL bulb. As mentioned earlier, a major drawback of the CFL bulb is that it contains mercury, a neurotoxin, and must be disposed of as hazardous waste. From these data, it is easy to understand why the LED light bulb is quickly becoming the standard in lighting.


















 ,
,  , and
, and 
 line losses. These line losses exist whether the power is generated from conventional power plants (using coal, oil, or gas), nuclear plants, solar plants, hydroelectric plants, or wind farms. These losses can be reduced, but not eliminated, by transmitting using a higher voltage. It would be wonderful if these line losses could be eliminated, but that would require transmission lines that have zero resistance. In a world that has a global interest in not wasting energy, the reduction or elimination of this unwanted thermal energy would be a significant achievement. Is this possible?
line losses. These line losses exist whether the power is generated from conventional power plants (using coal, oil, or gas), nuclear plants, solar plants, hydroelectric plants, or wind farms. These losses can be reduced, but not eliminated, by transmitting using a higher voltage. It would be wonderful if these line losses could be eliminated, but that would require transmission lines that have zero resistance. In a world that has a global interest in not wasting energy, the reduction or elimination of this unwanted thermal energy would be a significant achievement. Is this possible? (
( ), the resistance abruptly went to zero (
), the resistance abruptly went to zero ( for mercury. The sample of mercury entered into a phase where the resistance was absolutely zero. This phenomenon is known as
for mercury. The sample of mercury entered into a phase where the resistance was absolutely zero. This phenomenon is known as  . The resistance of the conductor is not actually zero, it is less than
. The resistance of the conductor is not actually zero, it is less than  .) There are various methods to measure very small resistances, such as the four-point method, but an ohmmeter is not an acceptable method to use for testing resistance in superconductivity.
.) There are various methods to measure very small resistances, such as the four-point method, but an ohmmeter is not an acceptable method to use for testing resistance in superconductivity.
 (
( ) and in 1953, vanadium-silicon was found to become superconductive at
) and in 1953, vanadium-silicon was found to become superconductive at  (
( ). The temperatures for the transition into superconductivity were slowly creeping higher. Strangely, many materials that make good conductors, such as copper, silver, and gold, do not exhibit superconductivity. Imagine the energy savings if transmission lines for electric power-generating stations could be made to be superconducting at temperatures near room temperature! A resistance of zero ohms means no
). The temperatures for the transition into superconductivity were slowly creeping higher. Strangely, many materials that make good conductors, such as copper, silver, and gold, do not exhibit superconductivity. Imagine the energy savings if transmission lines for electric power-generating stations could be made to be superconducting at temperatures near room temperature! A resistance of zero ohms means no  (
( ) The ceramic material, composed of yttrium barium copper oxide (YBCO), was an insulator at room temperature. Although this temperature still seems quite cold, it is near the boiling point of liquid nitrogen, a liquid commonly used in refrigeration. You may have noticed refrigerated trucks traveling down the highway labeled as “Liquid Nitrogen Cooled.”
) The ceramic material, composed of yttrium barium copper oxide (YBCO), was an insulator at room temperature. Although this temperature still seems quite cold, it is near the boiling point of liquid nitrogen, a liquid commonly used in refrigeration. You may have noticed refrigerated trucks traveling down the highway labeled as “Liquid Nitrogen Cooled.” (
( ).
).
 ) The principal quantum number (
) The principal quantum number ( ) describes the energy levels in the subshell, and the electron spin quantum number (
) describes the energy levels in the subshell, and the electron spin quantum number ( ) describes the orientation of the spin of the electron, either up or down. As the material enters a superconducting state, pairs of electrons act more like bosons, which can condense into the same energy level and need not obey the Pauli exclusion principle. The electron pairs have a slightly lower energy and leave an energy gap above them on the order of
) describes the orientation of the spin of the electron, either up or down. As the material enters a superconducting state, pairs of electrons act more like bosons, which can condense into the same energy level and need not obey the Pauli exclusion principle. The electron pairs have a slightly lower energy and leave an energy gap above them on the order of  . This energy gap inhibits collision interactions that lead to ordinary resistivity. When the material is below the critical temperature, the thermal energy is less than the band gap and the material exhibits zero resistivity.
. This energy gap inhibits collision interactions that lead to ordinary resistivity. When the material is below the critical temperature, the thermal energy is less than the band gap and the material exhibits zero resistivity.
 )
) )
) ) 6.30
) 6.30
 (Earth’s magnet field is on the order of
(Earth’s magnet field is on the order of  ).
).
 )
)



![\rho=\rho_0[1+\alpha(T-T_0)]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ed9b305348a931cb15bd450d15068531_l3.svg "Rendered by QuickLaTeX.com")


 is the rate at which charge flows, given by
is the rate at which charge flows, given by 
 is the rate at which charge flows. Taking the limit as the change in time approaches zero, we have
is the rate at which charge flows. Taking the limit as the change in time approaches zero, we have  where
where  is the time derivative of the charge.
is the time derivative of the charge.


 where
where  resistivity is
resistivity is  where
where  where
where  and resistance
and resistance 


 ).
).
 slightly less than an hour. This is quite different from the
slightly less than an hour. This is quite different from the  for the truck battery. The calculator takes a very small amount of energy to operate, unlike the truck’s starter motor. There are several reasons that vehicles use batteries and not solar cells. Aside from the obvious fact that a light source to run the solar cells for a car or truck is not always available, the large amount of current needed to start the engine cannot easily be supplied by present-day solar cells. Solar cells can possibly be used to charge the batteries. Charging the battery requires a small amount of energy when compared to the energy required to run the engine and the other accessories such as the heater and air conditioner. Present day solar-powered cars are powered by solar panels, which may power an electric motor, instead of an internal combustion engine.
for the truck battery. The calculator takes a very small amount of energy to operate, unlike the truck’s starter motor. There are several reasons that vehicles use batteries and not solar cells. Aside from the obvious fact that a light source to run the solar cells for a car or truck is not always available, the large amount of current needed to start the engine cannot easily be supplied by present-day solar cells. Solar cells can possibly be used to charge the batteries. Charging the battery requires a small amount of energy when compared to the energy required to run the engine and the other accessories such as the heater and air conditioner. Present day solar-powered cars are powered by solar panels, which may power an electric motor, instead of an internal combustion engine.  -gauge wire is smaller than the diameter of the
-gauge wire is smaller than the diameter of the  -gauge wire. Since the drift velocity is inversely proportional to the cross-sectional area, the drift velocity in the
-gauge wire. Since the drift velocity is inversely proportional to the cross-sectional area, the drift velocity in the  so the drift velocity would decrease.
so the drift velocity would decrease. the resistance increases as the foil tracks are stretched. When the temperature changes, so does the resistivity of the foil tracks, changing the resistance. One way to combat this is to use two strain gauges, one used as a reference and the other used to measure the strain. The two strain gauges are kept at a constant temperature
the resistance increases as the foil tracks are stretched. When the temperature changes, so does the resistivity of the foil tracks, changing the resistance. One way to combat this is to use two strain gauges, one used as a reference and the other used to measure the strain. The two strain gauges are kept at a constant temperature so the current is also a function of time,
so the current is also a function of time, 
 of the power consumed is wasted, not being used for doing useful work. Most of the
of the power consumed is wasted, not being used for doing useful work. Most of the  drop across a resistor means that there is a change in potential or voltage across the resistor. Is there any change in current as it passes through a resistor? Explain.
drop across a resistor means that there is a change in potential or voltage across the resistor. Is there any change in current as it passes through a resistor? Explain. In this section, we presented Ohm’s law, which is commonly expressed as
In this section, we presented Ohm’s law, which is commonly expressed as  (assume the change in temperature of the material is negligible)? (b) What is the voltage applied is the current measured is
(assume the change in temperature of the material is negligible)? (b) What is the voltage applied is the current measured is  (assume the change in temperature of the material is negligible)? What will happen to the current if the material if the voltage remains constant, but the temperature of the material increases significantly?
(assume the change in temperature of the material is negligible)? What will happen to the current if the material if the voltage remains constant, but the temperature of the material increases significantly? but power companies deliver voltage in the kilovolt range and then step the voltage down using transformers to
but power companies deliver voltage in the kilovolt range and then step the voltage down using transformers to  to be used in homes. You will learn in later chapters that transformers consist of many turns of wire, which warm up as current flows through them, wasting some of the energy that is given off as heat. This sounds inefficient. Why do the power companies transport electric power using this method?
to be used in homes. You will learn in later chapters that transformers consist of many turns of wire, which warm up as current flows through them, wasting some of the energy that is given off as heat. This sounds inefficient. Why do the power companies transport electric power using this method?


 and
and  for use in electrical circuits. If a current of
for use in electrical circuits. If a current of  is accidentally passed through a
is accidentally passed through a  resistor rated at
resistor rated at  what would be the most probable outcome? Is there anything that can be done to prevent such an accident?
what would be the most probable outcome? Is there anything that can be done to prevent such an accident? and a current of
and a current of  produced by the generator. (a) What is the speed of the protons? (b) How many protons are produced each second?
produced by the generator. (a) What is the speed of the protons? (b) How many protons are produced each second? How many electrons strike the screen every minute?
How many electrons strike the screen every minute? if there is a constant current of
if there is a constant current of  ?
? where
where  is the current at time
is the current at time  and
and  is the time constant. How much charge flows through the conductor between
is the time constant. How much charge flows through the conductor between  ?
? What is the current at time
What is the current at time  ?
?![I(t)=I_m\sin[2\pi(60~\mathrm{Hz})t].](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a9fe8e01057fae80f6f3ac49d5e9d673_l3.svg "Rendered by QuickLaTeX.com") Write an equation for the charge as a function of time.
Write an equation for the charge as a function of time. What is the current through the circuit as a function of time?
What is the current through the circuit as a function of time? in diameter (
in diameter ( (a) What is the absolute value of the charge density in the wire? (b) What is the drift velocity of the electrons? (c) What would be the drift velocity if the same gauge copper were used instead of aluminum? The density of copper is
(a) What is the absolute value of the charge density in the wire? (b) What is the drift velocity of the electrons? (c) What would be the drift velocity if the same gauge copper were used instead of aluminum? The density of copper is  and the density of aluminum is
and the density of aluminum is  The molar mass of aluminum is
The molar mass of aluminum is  and the molar mass of copper is
and the molar mass of copper is  Assume each atom of metal contributes one free electron.
Assume each atom of metal contributes one free electron. with a radius of
with a radius of  What is the magnitude of the current density of the beam?
What is the magnitude of the current density of the beam? The beam current is
The beam current is  and is constant. The charge density of the beam is
and is constant. The charge density of the beam is  protons per cubic meter. (a) What is the current density of the beam? (b) What is the drift velocity of the beam? (c) How much time does it take for
protons per cubic meter. (a) What is the current density of the beam? (b) What is the drift velocity of the beam? (c) How much time does it take for  protons to be emitted by the accelerator?
protons to be emitted by the accelerator? The magnitude of the current density is modelled as
The magnitude of the current density is modelled as  What is the current through the inner section of the wire from the centre to
What is the current through the inner section of the wire from the centre to  ?
? amps. The air conditioner is wired using a
amps. The air conditioner is wired using a  Find the magnitude of (a) current density and (b) the drift velocity.
Find the magnitude of (a) current density and (b) the drift velocity. flashlight when its hot resistance is
flashlight when its hot resistance is  ?
? battery and through which
battery and through which  flows.
flows. given that
given that  passes through it?
passes through it? -long piece of
-long piece of  Find the resistance of a
Find the resistance of a  length of such wire used for power transmission.
length of such wire used for power transmission. -diameter tungsten filament in a light bulb is to have a resistance of
-diameter tungsten filament in a light bulb is to have a resistance of  at
at  how long should it be?
how long should it be? and a resistance of
and a resistance of  What is the radius of the rod?
What is the radius of the rod? -diameter rod of pure silicon that is
-diameter rod of pure silicon that is  is applied to it? (Such a rod may be used to make nuclear-particle detectors, for example.)
is applied to it? (Such a rod may be used to make nuclear-particle detectors, for example.) to double its resistance, neglecting any changes in dimensions? (b) Does this happen in household wiring under ordinary circumstances?
to double its resistance, neglecting any changes in dimensions? (b) Does this happen in household wiring under ordinary circumstances? from its value at
from its value at  Over what temperature range can it be used?
Over what temperature range can it be used? greater at
greater at  than at
than at  to
to  contains pure carbon resistors. By what factor does their resistance increase over this range?
contains pure carbon resistors. By what factor does their resistance increase over this range? long with a diameter of
long with a diameter of  at
at  ?
? at
at  at the same temperature. At what temperature are their resistances equal?
at the same temperature. At what temperature are their resistances equal? resistor is connected across a D cell battery (
resistor is connected across a D cell battery ( ). What is the current through the resistor?
). What is the current through the resistor? is connected across two D cell batteries (each
is connected across two D cell batteries (each  ) in series, with a total voltage of
) in series, with a total voltage of  The manufacturer advertises that their resistors are within
The manufacturer advertises that their resistors are within  of the rated value. What are the possible minimum current and maximum current through the resistor?
of the rated value. What are the possible minimum current and maximum current through the resistor? The current measure is
The current measure is  What is the resistance of the resistor?
What is the resistance of the resistor?












 battery is used to supply current to a
battery is used to supply current to a  resistor. Assume the voltage drop across any wires used for connections is negligible. (a) What is the current through the resistor? (b) What is the power dissipated by the resistor? (c) What is the power input from the battery, assuming all the electrical power is dissipated by the resistor? (d) What happens to the energy dissipated by the resistor?
resistor. Assume the voltage drop across any wires used for connections is negligible. (a) What is the current through the resistor? (b) What is the power dissipated by the resistor? (c) What is the power input from the battery, assuming all the electrical power is dissipated by the resistor? (d) What happens to the energy dissipated by the resistor? ?
? using a voltage of
using a voltage of  How long should the engineer make the wire?
How long should the engineer make the wire? LED bulb. Both produce
LED bulb. Both produce  is
is  What are the current through and the voltage drop across the resistor?
What are the current through and the voltage drop across the resistor? automobile battery, rated at
automobile battery, rated at  The driver, knowing there is nothing that can be done, estimates how long the lights will shine, assuming there are two
The driver, knowing there is nothing that can be done, estimates how long the lights will shine, assuming there are two  What did the driver conclude?
What did the driver conclude? and a voltage of
and a voltage of  (a) Assuming the power plant that supplies
(a) Assuming the power plant that supplies  estimate the percentage of the total power supplied by the power company that is lost in the transmission. (b) What would be the result is the power company delivered the electric power at
estimate the percentage of the total power supplied by the power company that is lost in the transmission. (b) What would be the result is the power company delivered the electric power at  ?
?
 resistor carries the maximum current possible without damaging the resistor. If the current were reduced to half the value, what would be the power consumed?
resistor carries the maximum current possible without damaging the resistor. If the current were reduced to half the value, what would be the power consumed? away from a residential area uses
away from a residential area uses  ) wire of copper to transmit power at a current of
) wire of copper to transmit power at a current of  How much more power is dissipated in the copper wires than it would be in superconducting wires?
How much more power is dissipated in the copper wires than it would be in superconducting wires? ) when it is at the same temperature as the patient. What is a patient’s temperature if the thermistor’s resistance at that temperature is
) when it is at the same temperature as the patient. What is a patient’s temperature if the thermistor’s resistance at that temperature is  of its value at
of its value at  (normal body temperature)?
(normal body temperature)? resistor is connected to a
resistor is connected to a  battery and the resistor leads are waterproofed and the resistor is placed in
battery and the resistor leads are waterproofed and the resistor is placed in  of room temperature water
of room temperature water  Current runs through the resistor for
Current runs through the resistor for  minutes. Assuming all the electrical energy dissipated by the resistor is converted to heat, what is the final temperature of the water?
minutes. Assuming all the electrical energy dissipated by the resistor is converted to heat, what is the final temperature of the water? ?
? and an outer radius of
and an outer radius of  and has a length of
and has a length of  separates the two conductors. What is the resistance of the cable?
separates the two conductors. What is the resistance of the cable? -metre long wire cable that is made of copper has a resistance of
-metre long wire cable that is made of copper has a resistance of  ohms. (a) What is the weight if the wire was made of copper? (b) What is the weight of a
ohms. (a) What is the weight if the wire was made of copper? (b) What is the weight of a  and the density of aluminum is
and the density of aluminum is 
 long with a cross-sectional area of
long with a cross-sectional area of  is used for a digital thermometer. (a) What is the resistance at room temperature? (b) What is the resistance at body temperature?
is used for a digital thermometer. (a) What is the resistance at room temperature? (b) What is the resistance at body temperature? and
and  in one summer day. By what percentage will an aluminum wire’s resistance change during the day?
in one summer day. By what percentage will an aluminum wire’s resistance change during the day? is applied across a
is applied across a  -gauge (diameter
-gauge (diameter  ) wire that is
) wire that is  long, the magnitude of the current density is
long, the magnitude of the current density is  What is the resistivity of the wire?
What is the resistivity of the wire? is drawn out through a die so that its new length is twice times its original length. Find the resistance of the longer wire. You may assume that the resistivity and density of the material are unchanged.
is drawn out through a die so that its new length is twice times its original length. Find the resistance of the longer wire. You may assume that the resistivity and density of the material are unchanged. ),
),  resistance?
resistance? turns of insulated
turns of insulated  ) in a single layer on a cylindrical non-conducting core of radius
) in a single layer on a cylindrical non-conducting core of radius  can be potentially fatal. Currents in that range can make the heart fibrillate (beat in an uncontrolled manner). The resistance of a dry human body can be approximately
can be potentially fatal. Currents in that range can make the heart fibrillate (beat in an uncontrolled manner). The resistance of a dry human body can be approximately  (a) What voltage can cause
(a) What voltage can cause  through a dry human body? (b) When a human body is wet, the resistance can fall to
through a dry human body? (b) When a human body is wet, the resistance can fall to  What voltage can cause harm to a wet body?
What voltage can cause harm to a wet body? -ohm,
-ohm,  -watt resistor is placed in series with a power supply. (a) What is the maximum voltage that can be applied to the resistor without harming the resistor? (b) What would be the current through the resistor?
-watt resistor is placed in series with a power supply. (a) What is the maximum voltage that can be applied to the resistor without harming the resistor? (b) What would be the current through the resistor? delivers a constant current of
delivers a constant current of  to an appliance. How much work does the battery do in three minutes?
to an appliance. How much work does the battery do in three minutes? battery has an internal resistance of a tenth of an ohm. (a) What is the current if the battery terminals are momentarily shorted together? (b) What is the terminal voltage if the battery delivers
battery has an internal resistance of a tenth of an ohm. (a) What is the current if the battery terminals are momentarily shorted together? (b) What is the terminal voltage if the battery delivers  amps to a circuit?
amps to a circuit? The density of copper is
The density of copper is  One mole of copper atoms (
One mole of copper atoms ( atoms) has a mass of approximately
atoms) has a mass of approximately  What is the magnitude of the drift velocity of the electrons, assuming that each copper atom contributes one free electron to the current?
What is the magnitude of the drift velocity of the electrons, assuming that each copper atom contributes one free electron to the current?![I(t)=(5.00~\mathrm{A})\sin[2\pi(60~\mathrm{Hz})t].](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-afe7e88a543f4cb97cd3a698ebf4874b_l3.svg "Rendered by QuickLaTeX.com") What is the current density at time
What is the current density at time  ?
? with a current of
with a current of  Each proton has a kinetic energy of
Each proton has a kinetic energy of  (a) What is the velocity of the protons? (b) What is the number (
(a) What is the velocity of the protons? (b) What is the number ( to
to  and the voltage changed linearly from
and the voltage changed linearly from  to
to  where
where  Suppose a voltage source is placed in series with a resistor of
Suppose a voltage source is placed in series with a resistor of  that supplied a current that alternated as a sine wave, for example,
that supplied a current that alternated as a sine wave, for example,  (a) What would a graph of the voltage drop across the resistor
(a) What would a graph of the voltage drop across the resistor  versus time look like? (b) What would a plot of
versus time look like? (b) What would a plot of  for one period look like? (Hint: If you are not sure, try plotting
for one period look like? (Hint: If you are not sure, try plotting  is drawn from a
is drawn from a  seconds. By how much is the chemical energy reduced?
seconds. By how much is the chemical energy reduced? with a current density of
with a current density of  as shown below. Find the current that passes through the face of the rod.
as shown below. Find the current that passes through the face of the rod. of water. A voltage source is connected in series with the resistor and a current of
of water. A voltage source is connected in series with the resistor and a current of  amps flows through the resistor for
amps flows through the resistor for  (a) What is the resistance of the resistor? (b) What is the voltage supplied by the power supply?
(a) What is the resistance of the resistor? (b) What is the voltage supplied by the power supply? (a) What is the initial current through the wire at time
(a) What is the initial current through the wire at time  (c) At what time
(c) At what time  ?
? and the outer radius is
and the outer radius is  The length of the resistor is
The length of the resistor is  The resistivity of the carbon is
The resistivity of the carbon is  (a) Prove that the resistance perpendicular from the axis is
(a) Prove that the resistance perpendicular from the axis is  (b) What is the resistance?
(b) What is the resistance? if the current density is
if the current density is  where
where  ?
?
 radiant heater to heat the student’s dorm room, during the hours between sunset and sunrise,
radiant heater to heat the student’s dorm room, during the hours between sunset and sunrise,  to
to  (a) What current does the heater operate at? (b) How many electrons move through the heater? (c) What is the resistance of the heater? (d) How much heat was added to the dorm room?
(a) What current does the heater operate at? (b) How many electrons move through the heater? (c) What is the resistance of the heater? (d) How much heat was added to the dorm room?
 metres long,
metres long,  (a) What is the current draw by the lamp? (b) How long would it take an electron to get from the battery to the lamp?
(a) What is the current draw by the lamp? (b) How long would it take an electron to get from the battery to the lamp? grams (almost two cups) of water for herbal tea. During the two minutes it takes the water to heat, the physics student becomes bored and decides to figure out the resistance of the heater. The student starts with the assumption that the water is initially at the temperature of the room
grams (almost two cups) of water for herbal tea. During the two minutes it takes the water to heat, the physics student becomes bored and decides to figure out the resistance of the heater. The student starts with the assumption that the water is initially at the temperature of the room  and reaches
and reaches  The specific heat of the water is
The specific heat of the water is  What is the resistance of the heater?
What is the resistance of the heater?



 ) when there is no current flowing. Since the unit for work is the joule and the unit for charge is the coulomb, the unit for emf is the volt (
) when there is no current flowing. Since the unit for work is the joule and the unit for charge is the coulomb, the unit for emf is the volt ( ).
). of a battery is voltage measured across the terminals of the battery when there is no load connected to the terminal. An ideal battery is an emf source that maintains a constant terminal voltage, independent of the current between the two terminals. An ideal battery has no internal resistance, and the terminal voltage is equal to the emf of the battery. In the next section, we will show that a real battery does have internal resistance and the terminal voltage is always less than the emf of the battery.
of a battery is voltage measured across the terminals of the battery when there is no load connected to the terminal. An ideal battery is an emf source that maintains a constant terminal voltage, independent of the current between the two terminals. An ideal battery has no internal resistance, and the terminal voltage is equal to the emf of the battery. In the next section, we will show that a real battery does have internal resistance and the terminal voltage is always less than the emf of the battery.

 and an internal resistance
and an internal resistance 
 .
.
 of the internal resistance.
of the internal resistance.
 , which is equal to the
, which is equal to the  . As with potential energy, it is the change in voltage that is important. When the term “voltage” is used, we assume that it is actually the change in the potential, or
. As with potential energy, it is the change in voltage that is important. When the term “voltage” is used, we assume that it is actually the change in the potential, or  is often omitted for convenience.
is often omitted for convenience.
 ), making the terminal voltage of the battery equal to (
), making the terminal voltage of the battery equal to ( .
. . (a) Calculate its terminal voltage when connected to a
. (a) Calculate its terminal voltage when connected to a  load. (b) What is the terminal voltage when connected to a
load. (b) What is the terminal voltage when connected to a  load? (c) What power does the
load? (c) What power does the ![\[I=\frac{\mathcal{E}}{R+r}=\frac{12.00~\mathrm{V}}{10.10~\Omega}=1.188~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fb28d69e4ccfc26898f4c30d80ed0c23_l3.svg "Rendered by QuickLaTeX.com")
![\[V_{\mathrm{terminal}}=\mathcal{E}-Ir=12.00~\mathrm{V}-(1.188~\mathrm{A})(0.100~\Omega)=11.90~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6c917f86edaf62be84dddd1ea71cc501_l3.svg "Rendered by QuickLaTeX.com")
 , the current is
, the current is![\[I=\frac{\mathcal{E}}{R+r}=\frac{12.00~\mathrm{V}}{0.600~\Omega}=20.00~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d4d2553faf6fd7ca7488b95671f016c8_l3.svg "Rendered by QuickLaTeX.com")
![\[V_{\mathrm{terminal}}=\mathcal{E}-Ir=12.00~\mathrm{V}-(20.00~\mathrm{A})(0.100~\Omega)=10.00~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d96bbdfd50bc61aa3356632e8520927c_l3.svg "Rendered by QuickLaTeX.com")
![\[P=I^2R=(20.0~\mathrm{A})^2(0.500~\Omega)=2.00\times10^2~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f862517c639d3e542d9f7bfe41fda364_l3.svg "Rendered by QuickLaTeX.com")
 or
or  , where
, where  in this case).
in this case).![\[I=\frac{\mathcal{E}}{R+r}=\frac{12.00~\mathrm{V}}{1.00~\Omega}=12.0~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3886cfe082bfbbe7cbcbab6c418fc788_l3.svg "Rendered by QuickLaTeX.com")
![\[V_{\mathrm{terminal}}=\mathcal{E}-Ir=12.00~\mathrm{V}-(12.00~\mathrm{A})(0.500~\Omega)=6.00~\mathrm{V},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-335e451fae1a2e60fd7057471c62294f_l3.svg "Rendered by QuickLaTeX.com")
![\[P=I^2R=(12.00~\mathrm{A})^2(0.500~\Omega)=72.0\times10^2~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b8fbe98a49d867068aaab03c9d1e0620_l3.svg "Rendered by QuickLaTeX.com")

 and
and 

 . Since there is only one path for the charges to flow through, the current is the same through each resistor. The equivalent resistance of a set of resistors in a series connection is equal to the algebraic sum of the individual resistances.
. Since there is only one path for the charges to flow through, the current is the same through each resistor. The equivalent resistance of a set of resistors in a series connection is equal to the algebraic sum of the individual resistances.
![\[\sum_{i=1}^{N}V_i=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e5c09a7ab864952f750a6dad297f68e5_l3.svg "Rendered by QuickLaTeX.com")


 is connected to a circuit consisting of four
is connected to a circuit consisting of four  and one
and one  resistors all in series (
resistors all in series (
 .
.![\[R_{\mathrm{eq}}=R_1+R_2+R_3+R_4+R_5=20~\Omega+20~\Omega+20~\Omega+20~\Omega+10~\Omega=90~\Omega\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0d9ee9ddc74978c5aa7198ce9a756c9a_l3.svg "Rendered by QuickLaTeX.com")
![\[I=\frac{V}{R_{\mathrm{eq}}}=\frac{9~\mathrm{V}}{90~\Omega}=0.1~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d8220dadbe86917fbb2b887c2f5c25e4_l3.svg "Rendered by QuickLaTeX.com")
![\[V_1=V_2=V_3=V_4=(0.1~\mathrm{A})20~\Omega=2~\mathrm{V},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3b4f944a324c9d51106c1337b999a94b_l3.svg "Rendered by QuickLaTeX.com")
![\[V_5=(0.1~\mathrm{A})10~\Omega=1~\mathrm{V},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-16268092a1da0a4988e5bd3e047d26a2_l3.svg "Rendered by QuickLaTeX.com")
![\[V_1+V_2+V_3+V_4+V_5=9~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-129bb515a1080b0b9bdc03dc98db9af7_l3.svg "Rendered by QuickLaTeX.com")
![\[P_1=P_2=P_3=P_4=(0.1~\mathrm{A})^2(20~\Omega)=0.2~\mathrm{W},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ffb3b52291f0a2369bafea6f3d6c8b34_l3.svg "Rendered by QuickLaTeX.com")
![\[P_5=(0.1~\mathrm{A})^2(10~\Omega)=0.1~\mathrm{W},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3be37aeeda2bd12ff3670b392aa3ec20_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{dissipated}}=0.2~\mathrm{W}+0.2~\mathrm{W}+0.2~\mathrm{W}+0.2~\mathrm{W}+0.1~\mathrm{W}=0.9~\mathrm{W},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9928c3f7c451e933ab7c79d9f3e30669_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{source}}=I\mathcal{E}=(0.1~\mathrm{A})(9~\mathrm{V})=0.9~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c6f3dd94304f3ac93e4d7470fd4583eb_l3.svg "Rendered by QuickLaTeX.com")
![\[R_{\mathrm{eq}}=R_1+R_2+R_3+\ldots+R_{N-1}+R_N=\sum_{i=1}^NR_i.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-79963466f98f660c26b542db55c07b7d_l3.svg "Rendered by QuickLaTeX.com")

![\[\sum I_{\mathrm{in}}=\sum I_{\mathrm{out}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6fb514c97ec43b268121fa84165d6642_l3.svg "Rendered by QuickLaTeX.com")
 . There are two loops in this circuit, which leads to the equations
. There are two loops in this circuit, which leads to the equations  and
and  Note the voltage across the resistors in parallel are the same (
Note the voltage across the resistors in parallel are the same ( ) and the current is additive:
) and the current is additive:
 of a parallel connection is related to the individual resistances by
of a parallel connection is related to the individual resistances by
 ,
,  , and
, and  are connected in parallel. The parallel connection is attached to a
are connected in parallel. The parallel connection is attached to a  voltage source. (a) What is the equivalent resistance? (b) Find the current supplied by the source to the parallel circuit. (c) Calculate the currents in each resistor and show that these add together to equal the current output of the source. (d) Calculate the power dissipated by each resistor. (e) Find the power output of the source and show that it equals the total power dissipated by the resistors.
voltage source. (a) What is the equivalent resistance? (b) Find the current supplied by the source to the parallel circuit. (c) Calculate the currents in each resistor and show that these add together to equal the current output of the source. (d) Calculate the power dissipated by each resistor. (e) Find the power output of the source and show that it equals the total power dissipated by the resistors. .
. .
. , since each resistor gets the full voltage. The total current is the sum of the individual currents:
, since each resistor gets the full voltage. The total current is the sum of the individual currents:  .
. , since each resistor gets full voltage.
, since each resistor gets full voltage.![\[R_{\mathrm{eq}}&=&\left(\frac{1}{R_1}+\frac{1}{R_2}+\frac{1}{R_3}\right)^{-1}=\left(\frac{1}{1.00~\Omega}+\frac{1}{2.00~\Omega}+\frac{1}{2.00~\Omega}\right)^{-1}=0.50~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-38dadc683b63855842ecf41abbfdb584_l3.svg "Rendered by QuickLaTeX.com")
 . As predicted,
. As predicted, ![\[I=\frac{V}{R_{\mathrm{eq}}}=\frac{3.00~\mathrm{V}}{0.50~\Omega}=6.00~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-de6604e266f157bebc7a81130bae15de_l3.svg "Rendered by QuickLaTeX.com")
![\[I_1=\frac{V}{R_1}=\frac{3.00~\mathrm{V}}{1.00~\Omega}=3.00~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-de5b67ff8c8539198b754c502c0a2e6e_l3.svg "Rendered by QuickLaTeX.com")
![\[I_2=\frac{V}{R_2}=\frac{3.00~\mathrm{V}}{2.00~\Omega}=1.50~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b0d3445c0b7c71cf473e62311ad40975_l3.svg "Rendered by QuickLaTeX.com")
![\[I_3=\frac{V}{R_3}=\frac{3.00~\mathrm{V}}{2.00~\Omega}=1.50~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fa6615c11a9ad4838183434dd2ef89ea_l3.svg "Rendered by QuickLaTeX.com")
![\[I_1+I_2+I_3=6.00~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-70b7497a5735ad1bd78421a44b3d26e2_l3.svg "Rendered by QuickLaTeX.com")
![\[P_1=\frac{V^2}{R_1}=\frac{(3.00~\mathrm{V})^2}{1.00~\Omega}=9.00~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ebc10da7c6390c79158bd318b9d59cca_l3.svg "Rendered by QuickLaTeX.com")
![\[P_2=\frac{V^2}{R_2}=\frac{(3.00~\mathrm{V})^2}{2.00~\Omega}=4.50~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8b765541a2143dda043be62400f7092e_l3.svg "Rendered by QuickLaTeX.com")
![\[P_3=\frac{V^2}{R_3}=\frac{(3.00~\mathrm{V})^2}{2.00~\Omega}=4.50~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cf1160eb652db759ae0e02d93c0651f2_l3.svg "Rendered by QuickLaTeX.com")
![\[P=IV=(6.00~\mathrm{A})(3.00~\mathrm{V})=18.00~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-929b40d50be1a48b8bdbce4a8dfff562_l3.svg "Rendered by QuickLaTeX.com")
 :
:![\[P_1+P_2+P_3=9.00~\mathrm{W}+4.50~\mathrm{W}+4.50~\mathrm{W}=18.00~\mathrm{W}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c247d02e8b7518578985fa45885a862e_l3.svg "Rendered by QuickLaTeX.com")
 applied to the same three resistors connected in series. Would the equivalent resistance of the series circuit be higher, lower, or equal to the three resistor in parallel? Would the current through the series circuit be higher, lower, or equal to the current provided by the same voltage applied to the parallel circuit? How would the power dissipated by the resistor in series compare to the power dissipated by the resistors in parallel?
applied to the same three resistors connected in series. Would the equivalent resistance of the series circuit be higher, lower, or equal to the three resistor in parallel? Would the current through the series circuit be higher, lower, or equal to the current provided by the same voltage applied to the parallel circuit? How would the power dissipated by the resistor in series compare to the power dissipated by the resistors in parallel?![\[R_{\mathrm{eq}}&=&\left(\frac{1}{R_1}+\frac{1}{R_2}+\frac{1}{R_3}+\ldots+\frac{1}{R_{N-1}}+\frac{1}{R_N}\right)^{-1}=\left(\sum_{i=1}^N\frac{1}{R_i}\right)^{-1},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-365cc2f3bc303b61c609aecfacb3ab1b_l3.svg "Rendered by QuickLaTeX.com")






 are in series and the equivalent resistance is
are in series and the equivalent resistance is  . (c) Step 2: The reduced circuit shows resistors
. (c) Step 2: The reduced circuit shows resistors  are in parallel, with an equivalent resistance of
are in parallel, with an equivalent resistance of  . (d) Step 3: The reduced circuit shows that
. (d) Step 3: The reduced circuit shows that  are in series with an equivalent resistance of
are in series with an equivalent resistance of  , which is the equivalent resistance
, which is the equivalent resistance  with an equivalent resistance of
with an equivalent resistance of  . This results in a current of
. This results in a current of  from the voltage source.
from the voltage source.![\[R_{34}=R_3+R_4=6~\Omega+4~\Omega=10~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b2134820ab43a941b0fa0bac80c10919_l3.svg "Rendered by QuickLaTeX.com")
![\[R_{234}=\left(\frac{1}{R_2}+\frac{1}{R_{34}}\right)^{-1}=\left(\frac{1}{10~\Omega}+\frac{1}{10~\Omega}\right)^{-1}=5~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-09cd84389bd61c63f96175f5af43ee03_l3.svg "Rendered by QuickLaTeX.com")
![\[R_{\mathrm{eq}}=R_{1234}=R_1+R_{234}=7~\Omega+5~\Omega=12~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ed287ba7ea01673d05309c96e7899b65_l3.svg "Rendered by QuickLaTeX.com")
 . This current runs through resistor
. This current runs through resistor ![\[V_1=I_1R_1=(2~\mathrm{A})(7~\Omega)=14~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-011339b3f1b0bd94006a9274d355b1fb_l3.svg "Rendered by QuickLaTeX.com")
 to be dropped across the parallel combination of
to be dropped across the parallel combination of ![\[I_2=\frac{V_2}{R_2}=\frac{10~\mathrm{V}}{10~\Omega}=1~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bb529b1dd83b4e6985bc644bea86fccb_l3.svg "Rendered by QuickLaTeX.com")
 are equal to
are equal to![\[I_3=I_4=I-I_2=2~\mathrm{A}-1~\mathrm{A}=1~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-dd0e53911ca2b0bb5559709b5f6af581_l3.svg "Rendered by QuickLaTeX.com")
 and
and  . The final analysis is to look at the power supplied by the voltage source and the power dissipated by the resistors. The power dissipated by the resistors is
. The final analysis is to look at the power supplied by the voltage source and the power dissipated by the resistors. The power dissipated by the resistors is
 . Analyzing the power supplied to the circuit and the power dissipated by the resistors is a good check for the validity of the analysis; they should be equal.
. Analyzing the power supplied to the circuit and the power dissipated by the resistors is a good check for the validity of the analysis; they should be equal.
 . The voltage across
. The voltage across  .
. , the power dissipated by the resistor can also be found using
, the power dissipated by the resistor can also be found using  .
.![\[R_{\mathrm{eq}}=R_1+\left(\frac{1}{R_2}+\frac{1}{R_3}\right)^{-1}=1.00~\Omega+\left(\frac{1}{6.00~\Omega}+\frac{1}{13.00~\Omega}\right)^{-1}=5.10~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-77ac1c9521674c8f63883f6d64853cb6_l3.svg "Rendered by QuickLaTeX.com")
 and
and  , respectively).
, respectively).![\[I_1=I=\frac{V}{R_{\mathrm{eq}}}=\frac{12.0~\mathrm{V}}{5.10~\Omega}=2.35~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0047e16e5604d9761831860f85ee042d_l3.svg "Rendered by QuickLaTeX.com")
![\[V_1=I_1R_1=(2.35~\mathrm{A})(1~\Omega)=2.35~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-94be43dd4a7e3560230efc0be4d34efd_l3.svg "Rendered by QuickLaTeX.com")
![\[V_2=V_3=V-V_1=12.0~\mathrm{V}-2.35~\mathrm{V}=9.65~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f200efbb224689e4cac47a55eec16c45_l3.svg "Rendered by QuickLaTeX.com")
![\[I_2=\frac{V_2}{R_2}=\frac{9.65~\mathrm{V}}{6.00~\Omega}=1.61~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-52876b72a5cfd67f3eb7afde0c6087fb_l3.svg "Rendered by QuickLaTeX.com")
 that flowed through
that flowed through ![\[P_2=I_2^2R_2=(1.61~\mathrm{A})^2(6.00~\Omega)=15.5~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-36dcac165993f6c29508ac76b3492acc_l3.svg "Rendered by QuickLaTeX.com")

 are connected to two resistors that are connected in parallel
are connected to two resistors that are connected in parallel  . The series-parallel combination is connected to a battery. Each resistor has a resistance of
. The series-parallel combination is connected to a battery. Each resistor has a resistance of  . The wires connecting the resistors and battery have negligible resistance. A current of
. The wires connecting the resistors and battery have negligible resistance. A current of 
 . This parallel combination is in series with the other two resistors, so the equivalent resistance of the circuit is
. This parallel combination is in series with the other two resistors, so the equivalent resistance of the circuit is  . The voltage supplied by the battery is therefore
. The voltage supplied by the battery is therefore  .
.![\[P_{\mathrm{batt}}=IV=100.00~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bf48e16156e320d959617a47fec68e31_l3.svg "Rendered by QuickLaTeX.com")
 ,
, . The power dissipated by the resistors is equal to the sum of the power dissipated by each resistor:
. The power dissipated by the resistors is equal to the sum of the power dissipated by each resistor:




 . In a closed loop, whatever energy is supplied by a voltage source, the energy must be transferred into other forms by the devices in the loop, since there are no other ways in which energy can be transferred into or out of the circuit. Kirchhoff’s loop rule states that the algebraic sum of potential differences, including voltage supplied by the voltage sources and resistive elements, in any loop must be equal to zero. For example, consider a simple loop with no junctions, as in
. In a closed loop, whatever energy is supplied by a voltage source, the energy must be transferred into other forms by the devices in the loop, since there are no other ways in which energy can be transferred into or out of the circuit. Kirchhoff’s loop rule states that the algebraic sum of potential differences, including voltage supplied by the voltage sources and resistive elements, in any loop must be equal to zero. For example, consider a simple loop with no junctions, as in 
 , and
, and  , and the labels help keep track of the voltage differences as we travel around the circuit. Start at point
, and the labels help keep track of the voltage differences as we travel around the circuit. Start at point 
![\[V-IR_1-IR_2-IR_3=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b49fa5c49aaad818fbfb9f5ecafd0c10_l3.svg "Rendered by QuickLaTeX.com")
![\[I=\frac{V}{R_1+R_2+R_3}=\frac{12.00~\mathrm{V}}{1.00~\Omega+2.00~\Omega+3.00~\Omega}=2.00~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-774fe2c8459472a1b46d38392f89e136_l3.svg "Rendered by QuickLaTeX.com")
 . These labels simply help with orientation.
. These labels simply help with orientation.
 . Points
. Points  , and the equation for Junction
, and the equation for Junction  . These are equivalent equations, so it is necessary to keep only one of them.
. These are equivalent equations, so it is necessary to keep only one of them.


 by drawing arrows representing the currents and labeling each arrow, as shown in
by drawing arrows representing the currents and labeling each arrow, as shown in 
 includes the voltage source
includes the voltage source  , starts at point
, starts at point 
 is subtracted. Moving from point
is subtracted. Moving from point  is subtracted. Moving from point
is subtracted. Moving from point ![\[\mathrm{Loop}~abefa\,:~~~-I_1R_1-I_2R_2+V_1=0~~~\mathrm{or}~~~V_1=I_1R_1+I_2R_2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-84481ac099a636031421994340320c70_l3.svg "Rendered by QuickLaTeX.com")
 and
and 
![\[\mathrm{Loop}~ebcde\,\mathrm{:}~~~I_2R_2-I_3(R_3+R_4)-V_2=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8baec4173649deaccc775125914e7fb0_l3.svg "Rendered by QuickLaTeX.com")

![\[(R_1+R_2)I_1-R_2I_3=V_1.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4ee0c63e5d25c5baf865f54db966924d_l3.svg "Rendered by QuickLaTeX.com")
![\[(4)~6~\Omega I_1-3~\Omega I_3=24~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a2a9cae4e760a83029d9166a6eeb2285_l3.svg "Rendered by QuickLaTeX.com")
![\[I_1R_1+I_3(R_3+R_4)=V_1-V_2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fc0189752712d7ed68281f7f01ac9082_l3.svg "Rendered by QuickLaTeX.com")
![\[(5)~3~\Omega I_1+7~\Omega I_3=-5~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-54cbbeb5501ad23b37ac1f257b56ab9b_l3.svg "Rendered by QuickLaTeX.com")
 , or
, or  . Using Eq. (4) results in
. Using Eq. (4) results in  . Finally, Eq. (1) yields
. Finally, Eq. (1) yields  . One way to check that the solutions are consistent is to check the power supplied by the voltage sources and the power dissipated by the resistors:
. One way to check that the solutions are consistent is to check the power supplied by the voltage sources and the power dissipated by the resistors:![\[P_{\mathrm{in}}=I_1V_1+I_3V_2=130~\mathrm{W},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7077e2abf3077e564a6c2fa5da60fa9a_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{out}}=I_1^2R_1+I_2^2R_2+I_3^2R_3+I_3^2R_4=130~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cb100de1e8869221fb9ccfd32bbb9342_l3.svg "Rendered by QuickLaTeX.com")
 and not
and not  .
.


 . The second loop equation can be simplified by dividing both sides by
. The second loop equation can be simplified by dividing both sides by  .
.
![\[I_1=0.20~\mathrm{A},~I_2=0.30~\mathrm{A},~I_3=0.50~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e220319fa57b5107bea3e8a108a396cf_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{R_1}=I_1^2R_1=0.04~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7bd406b0a3005ffd1f460d4f9aa849d6_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{R_2}=I_2^2R_2=0.45~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-38c2af0c252b95ac8787b5e2f3d332ed_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{R_3}=I_3^2R_3=0.25~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3c098b756b18b43ab949326c5219ca93_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{R_4}=I_1^2R_4=0.08~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-85642b3d2a9bd390808855b0040729bb_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{R_5}=I_2^2R_5=0.09~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5f8e5311d273269b3014178238bc2b0c_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{R_6}=I_2^2R_6=0.18~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-880f34fcea9f5b04bd43203b979642fc_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{dissipated}}=1.09~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-03f9750da14c1b52094e24bcbb4fc3d8_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{source}}=I_1V_1+I_2V_3+I_3V_2=0.10~\mathrm{W}+0.69~\mathrm{W}+0.30~\mathrm{W}=1.09~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5e8da703c17c03ea16e7c1136e74ccdd_l3.svg "Rendered by QuickLaTeX.com")

![\[\mathrm{Loop}~abcda\,:~~~-IR_1-V_1-IR_2+V_2-IR_3=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cb6873a422a06cbc4632f30e3cb47f78_l3.svg "Rendered by QuickLaTeX.com")
![\[I(R_1+R_2+R_3)=V_2-V_1.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-53be6d1c17f70d4c3ec7a8dffcce7d02_l3.svg "Rendered by QuickLaTeX.com")
![\[I=\frac{V_2-V_1}{R_1+R_2+R_3}=\frac{24~\mathrm{V}-12~\mathrm{V}}{10.0~\Omega+30.0~\Omega+10.0~\Omega}=0.20~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ef80eb588465d845b0dd63522c2d5167_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{R_1}=I^2R_1=0.40~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e1ca935a88e5c7a42c7438aa1e006d99_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{R_2}=I^2R_2=1.20~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5f99f5dbdcb732a71e2f702cd816d233_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{R_3}=I^2R_3=0.80~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-748a09bb7f737cf35965ed71202f6a48_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{V_1}=I^2V_1=2.40~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-03a76c2e06bb887aebaae0172153c46d_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{dissipated}}=4.80~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e9b33b0061b6f57e7ddb30ba8252caab_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{source}}=IV_2=4.80~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6f60971fa700cc29bad99bc9fa5eb8eb_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{E}_1-Ir_1+\mathcal{E}_2-Ir_2-IR=0,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-903a14078a30ee58320b10ad47c86c36_l3.svg "Rendered by QuickLaTeX.com")
![\[[(\mathcal{E}_1+\mathcal{E}_2)-I(r_1+r_2)]-IR=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ab1f441317c883200f9bcb3a3ea08a20_l3.svg "Rendered by QuickLaTeX.com")

![\[V_{\mathrm{terminal}}=(\mathcal{E}_1-Ir_1)+(\mathcal{E}_2-Ir_2)=[(\mathcal{E}_1+\mathcal{E}_2)-I(r_1+r_2)]=(\mathcal{E}_1+\mathcal{E}_2)-Ir_{\mathrm{eq}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a5db34ef63cb474ef0d5f4f36c295367_l3.svg "Rendered by QuickLaTeX.com")
 to the flashlight.
to the flashlight.
 .
.![\[(\mathcal{E}_1-Ir_1)+(\mathcal{E}_2-Ir_2)=IR,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-93c81cc3a51b54d6b233edf12df78aa8_l3.svg "Rendered by QuickLaTeX.com")
![\[Ir_1+Ir_2+IR=\mathcal{E}_1+\mathcal{E}_2,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1ae6b6210418cc2b34021700d9ab85eb_l3.svg "Rendered by QuickLaTeX.com")
![\[I=\frac{\mathcal{E}_1+\mathcal{E}_2}{r_1+r_2+R}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-52ba342e248d264d52cd258c72209378_l3.svg "Rendered by QuickLaTeX.com")


 .
.
 , where
, where  . The terminal voltage is equal to the potential drop across the load resistor
. The terminal voltage is equal to the potential drop across the load resistor  . The parallel connection reduces the internal resistance and thus can produce a larger current.
. The parallel connection reduces the internal resistance and thus can produce a larger current.
 .
. , while the current output is a function of the amount of sunlight falling on the cell (the incident solar radiation known as the insolation). Under bright noon sunlight, a current per unit area of about
, while the current output is a function of the amount of sunlight falling on the cell (the incident solar radiation known as the insolation). Under bright noon sunlight, a current per unit area of about  of cell surface area is produced by typical single-crystal cells.
of cell surface area is produced by typical single-crystal cells. and
and  cells, with a power output of
cells, with a power output of  to
to  .
.


 , whereas high-precision voltmeters have resistances on the order of
, whereas high-precision voltmeters have resistances on the order of  . The value of the resistance may vary, depending on which scale is used on the meter.
. The value of the resistance may vary, depending on which scale is used on the meter.
 , where the voltage is known and the current is measured, or the current is known and the voltage is measured.
, where the voltage is known and the current is measured, or the current is known and the voltage is measured. circuits
circuits
 . This equation can be used to model the charge as a function of time as the capacitor charges. Capacitance is defined as
. This equation can be used to model the charge as a function of time as the capacitor charges. Capacitance is defined as  , so the voltage across the capacitor is V_C=q/C. Using Ohm’s law, the potential drop across the resistor is
, so the voltage across the capacitor is V_C=q/C. Using Ohm’s law, the potential drop across the resistor is  , and the current is defined as
, and the current is defined as  .
.![\[\mathcal{E}-V_R-V_C=0,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9ba3e366aa0a25134f20b4fbb3bbcebe_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{E}-IR-\frac{q}{C}=0,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-71440c03ab25bf4a66556f6861fe9118_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{E}-r\frac{dq}{dt}-\frac{q}{C}=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a7717e586e909f398171f620e2ebb3bc_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{dq}{dt}=\frac{\mathcal{E}C-q}{RC},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6998259e8a15575caf2bb47c8fad7711_l3.svg "Rendered by QuickLaTeX.com")
![\[\int_0^q\frac{dq}{\mathcal{E}C-q}=\frac{1}{RC}\int_0^tdt.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-91764ac2a1d1b80fd02fffbf3af96351_l3.svg "Rendered by QuickLaTeX.com")
 , then
, then  . The result is
. The result is![\[-\int_0^q\frac{du}{u}=\frac{1}{RC}\int_0^tdt,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bd1437a79410cd2e4961e22671cdf133_l3.svg "Rendered by QuickLaTeX.com")
![\[\ln\left(\frac{\mathcal{E}C-q}{\mathcal{E}C}\right)=-\frac{1}{RC}t,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c8ca7279ab8e730329c2662d6b6d3a9b_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{\mathcal{E}C-q}{\mathcal{E}C}=e^{-t/RC}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0e80ddd7d039f626d768fd9e8aa7f1d9_l3.svg "Rendered by QuickLaTeX.com")

 and has units of coulombs. The units of
and has units of coulombs. The units of 
 the charge is equal to
the charge is equal to  of the maximum charge
of the maximum charge  and approaches zero as time increases.
and approaches zero as time increases.![\[I(t)=\frac{dq}{dt}=\frac{d}{dt}\left[C\mathcal{E}\left(1-e^{-\frac{t}{RC}}\right)\right]=C\mathcal{E}\left(\frac{1}{RC}\right)e^{-\frac{t}{RC}}=\frac{\mathcal{E}}{R}e^{-\frac{t}{RC}}=I_0e^{-\frac{t}{RC}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3f9d717e91d2ce3d576d3a32f35d5114_l3.svg "Rendered by QuickLaTeX.com")

 . As time approaches infinity, the current approaches zero. At time
. As time approaches infinity, the current approaches zero. At time  , the current through the resistor is
, the current through the resistor is  .
.

 .
. , which simplifies to
, which simplifies to  . Using the definition of current
. Using the definition of current  and integrating the loop equation yields an equation for the charge on the capacitor as a function of time:
and integrating the loop equation yields an equation for the charge on the capacitor as a function of time:
 is the time constant of the circuit. As shown in the graph, the charge decreases exponentially from the initial charge, approaching zero as time approaches infinity.
is the time constant of the circuit. As shown in the graph, the charge decreases exponentially from the initial charge, approaching zero as time approaches infinity.

 . When this happens, the neon in the lamp breaks down and allows the capacitor to discharge through the lamp, producing a bright flash. After the capacitor fully discharges through the neon lamp, it begins to charge again, and the process repeats. Assuming that the time it takes the capacitor to discharge is negligible, what is the time interval between flashes?
. When this happens, the neon in the lamp breaks down and allows the capacitor to discharge through the lamp, producing a bright flash. After the capacitor fully discharges through the neon lamp, it begins to charge again, and the process repeats. Assuming that the time it takes the capacitor to discharge is negligible, what is the time interval between flashes? .
. . We can solve the voltage equation for the time it takes the capacitor to reach
. We can solve the voltage equation for the time it takes the capacitor to reach 
 seconds, a frequency of
seconds, a frequency of  . The relaxation oscillator has many other practical uses. It is often used in electronic circuits, where the neon lamp is replaced by a transistor or a device known as a tunnel diode. The description of the transistor and tunnel diode is beyond the scope of this chapter, but you can think of them as voltage controlled switches. They are normally open switches, but when the right voltage is applied, the switch closes and conducts. The “switch” can be used to turn on another circuit, turn on a light, or run a small motor. A relaxation oscillator can be used to make the turn signals of your car blink or your cell phone to vibrate.
. The relaxation oscillator has many other practical uses. It is often used in electronic circuits, where the neon lamp is replaced by a transistor or a device known as a tunnel diode. The description of the transistor and tunnel diode is beyond the scope of this chapter, but you can think of them as voltage controlled switches. They are normally open switches, but when the right voltage is applied, the switch closes and conducts. The “switch” can be used to turn on another circuit, turn on a light, or run a small motor. A relaxation oscillator can be used to make the turn signals of your car blink or your cell phone to vibrate. timer provides timed voltage pulses. The time between pulses is controlled by an
timer provides timed voltage pulses. The time between pulses is controlled by an  capacitor and a
capacitor and a  variable resistor known as a rheostat. A knob connected to the variable resistor allows the resistance to be adjusted from
variable resistor known as a rheostat. A knob connected to the variable resistor allows the resistance to be adjusted from  , the switch closes, energizing an electric motor and discharging the capacitor. The motor causes the windshield wipers to sweep once across the windshield and the capacitor begins to charge again. To what resistance should the rheostat be adjusted for the period of the wiper blades be
, the switch closes, energizing an electric motor and discharging the capacitor. The motor causes the windshield wipers to sweep once across the windshield and the capacitor begins to charge again. To what resistance should the rheostat be adjusted for the period of the wiper blades be  , where
, where  . The capacitance is given as
. The capacitance is given as  . Solving for the resistance yields
. Solving for the resistance yields


 , thermal power is created so rapidly that the cord melts or burns. (b) A schematic of the short circuit.
, thermal power is created so rapidly that the cord melts or burns. (b) A schematic of the short circuit. where
where  is the resistance of the wires and
is the resistance of the wires and  passes through the heart, death may occur. Most electrical shock fatalities occur because a current causes ventricular fibrillation, a massively irregular and often fatal, beating of the heart. On the other hand, a heart attack victim, whose heart is in fibrillation, can be saved by an electric shock from a defibrillator.
passes through the heart, death may occur. Most electrical shock fatalities occur because a current causes ventricular fibrillation, a massively irregular and often fatal, beating of the heart. On the other hand, a heart attack victim, whose heart is in fibrillation, can be saved by an electric shock from a defibrillator. for dc)
for dc) and, although unpleasant, shocks are apparently harmless for currents less than
and, although unpleasant, shocks are apparently harmless for currents less than  . A great number of safety rules take the
. A great number of safety rules take the  value for the maximum allowed shock. At
value for the maximum allowed shock. At  and above, the current can stimulate sustained muscular contractions, much as regular nerve impulses do (
and above, the current can stimulate sustained muscular contractions, much as regular nerve impulses do (
 . If he comes into contact with
. If he comes into contact with  ac, a current
ac, a current![\[I=(120~\mathrm{V})/(200~\mathrm{k}\Omega)=0.6~\mathrm{mA}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-18d64e7bb16c049804431da0203f8845_l3.svg "Rendered by QuickLaTeX.com")
 and the same
and the same  —above the “can’t let go” threshold and potentially dangerous.
—above the “can’t let go” threshold and potentially dangerous.













 where
where 
 at
at 
 then its charge decreases exponentially. The current flows in the opposite direction, compared to when it charges, and the magnitude of the charge decreases with time.
then its charge decreases exponentially. The current flows in the opposite direction, compared to when it charges, and the magnitude of the charge decreases with time. The large current causes a high power to be dissipated by the internal resistance (
The large current causes a high power to be dissipated by the internal resistance ( ). The power is dissipated as heat.
). The power is dissipated as heat. The current is
The current is  If one bulb burns out, the equivalent resistance is
If one bulb burns out, the equivalent resistance is  and the voltage does not change, but the current increases (
and the voltage does not change, but the current increases ( )
) which is higher than the equivalent resistance of the parallel circuit
which is higher than the equivalent resistance of the parallel circuit  The equivalent resistor of any number of resistors is always higher than the equivalent resistance of the same resistors connected in parallel. The current through for the series circuit would be
The equivalent resistor of any number of resistors is always higher than the equivalent resistance of the same resistors connected in parallel. The current through for the series circuit would be  which is lower than the sum of the currents through each resistor in the parallel circuit,
which is lower than the sum of the currents through each resistor in the parallel circuit,  This is not surprising since the equivalent resistance of the series circuit is higher. The current through a series connection of any number of resistors will always be lower than the current into a parallel connection of the same resistors, since the equivalent resistance of the series circuit will be higher than the parallel circuit. The power dissipated by the resistors in series would be
This is not surprising since the equivalent resistance of the series circuit is higher. The current through a series connection of any number of resistors will always be lower than the current into a parallel connection of the same resistors, since the equivalent resistance of the series circuit will be higher than the parallel circuit. The power dissipated by the resistors in series would be  which is lower than the power dissipated in the parallel circuit
which is lower than the power dissipated in the parallel circuit 
 The second voltage source consumes power:
The second voltage source consumes power: 
 instead of
instead of  The sum of the power dissipated and the power consumed would still equal the power supplied.
The sum of the power dissipated and the power consumed would still equal the power supplied.  As the battery ages, the internal resistance triples. How much is the current through the load resistor reduced?
As the battery ages, the internal resistance triples. How much is the current through the load resistor reduced? while normal operation of the truck’s other electrical components utilizes
while normal operation of the truck’s other electrical components utilizes  How would you manipulate
How would you manipulate  is being charged with a current of
is being charged with a current of  Note that in this process, the battery is being charged. (a) What is the potential difference across its terminals? (b) At what rate is thermal energy being dissipated in the battery? (c) At what rate is electric energy being converted into chemical energy?
Note that in this process, the battery is being charged. (a) What is the potential difference across its terminals? (b) At what rate is thermal energy being dissipated in the battery? (c) At what rate is electric energy being converted into chemical energy? emf, whereas alkaline cells have a
emf, whereas alkaline cells have a  emf. The radio has a
emf. The radio has a  resistance. (a) Draw a circuit diagram of the radio and its batteries. Now, calculate the power delivered to the radio (b) when using nicad cells, each having an internal resistance of
resistance. (a) Draw a circuit diagram of the radio and its batteries. Now, calculate the power delivered to the radio (b) when using nicad cells, each having an internal resistance of  and (c) when using alkaline cells, each having an internal resistance of
and (c) when using alkaline cells, each having an internal resistance of  (d) Does this difference seem significant, considering that the radio’s effective resistance is lowered when its volume is turned up?
(d) Does this difference seem significant, considering that the radio’s effective resistance is lowered when its volume is turned up? and is supplied by a
and is supplied by a  internal resistance. (a) What is the current to the motor? (b) What voltage is applied to it? (c) What power is supplied to the motor? (d) Repeat these calculations for when the battery connections are corroded and add
internal resistance. (a) What is the current to the motor? (b) What voltage is applied to it? (c) What power is supplied to the motor? (d) Repeat these calculations for when the battery connections are corroded and add  to the circuit. (Significant problems are caused by even small amounts of unwanted resistance in low-voltage, high-current applications.)
to the circuit. (Significant problems are caused by even small amounts of unwanted resistance in low-voltage, high-current applications.) when the current supplied increases by
when the current supplied increases by  ? (b) Can the emf of the voltage source be found with the information supplied?
? (b) Can the emf of the voltage source be found with the information supplied? power supply. (Do NOT do this!) (a) Draw a circuit diagram to represent the situation. (b) If the internal resistance of the power supply is
power supply. (Do NOT do this!) (a) Draw a circuit diagram to represent the situation. (b) If the internal resistance of the power supply is  what is the current through his body? (c) What is the power dissipated in his body? (d) If the power supply is to be made safe by increasing its internal resistance, what should the internal resistance be for the maximum current in this situation to be
what is the current through his body? (c) What is the power dissipated in his body? (d) If the power supply is to be made safe by increasing its internal resistance, what should the internal resistance be for the maximum current in this situation to be  or less? (e) Will this modification compromise the effectiveness of the power supply for driving low-resistance devices? Explain your reasoning.
or less? (e) Will this modification compromise the effectiveness of the power supply for driving low-resistance devices? Explain your reasoning. when being charged by a current of
when being charged by a current of  (a) What is the battery’s internal resistance? (b) What power is dissipated inside the battery? (c) At what rate (in
(a) What is the battery’s internal resistance? (b) What power is dissipated inside the battery? (c) At what rate (in  ) will its temperature increase if its mass is
) will its temperature increase if its mass is  and it has a specific heat of
and it has a specific heat of  assuming no heat escapes?
assuming no heat escapes? a
a  and a
and a  resistor connected in series? (b) In parallel?
resistor connected in series? (b) In parallel? a
a  and a
and a  resistor together?
resistor together? toaster, a
toaster, a  speaker, and a
speaker, and a  lamp are plugged into the same outlet in a
lamp are plugged into the same outlet in a  starter are ordinarily connected in parallel in a
starter are ordinarily connected in parallel in a  battery and
battery and  and
and  resistors, find the current and power for each when connected in series. (b) Repeat when the resistances are in parallel.
resistors, find the current and power for each when connected in series. (b) Repeat when the resistances are in parallel. In both parts, explicitly show how you follow the steps in the
In both parts, explicitly show how you follow the steps in the  and note how it compares with
and note how it compares with  the wire resistance is
the wire resistance is  and the bulb is nominally
and the bulb is nominally  what power will the bulb dissipate if a total of
what power will the bulb dissipate if a total of  passes through the wires when the motor comes on? Assume negligible change in bulb resistance. (b) What power is consumed by the motor?
passes through the wires when the motor comes on? Assume negligible change in bulb resistance. (b) What power is consumed by the motor? ), (a) their series resistance is very nearly equal to the greater resistance
), (a) their series resistance is very nearly equal to the greater resistance  (a) Find the equivalent resistance of the circuit. (b) Find the current through each resistor. (c) Find the potential drop across each resistor. (d) Find the power dissipated by each resistor. (e) Find the power supplied by the battery.
(a) Find the equivalent resistance of the circuit. (b) Find the current through each resistor. (c) Find the potential drop across each resistor. (d) Find the power dissipated by each resistor. (e) Find the power supplied by the battery.
 and
and 
 and
and 


 and
and  (b) Find the power supplied by the voltage sources. (c) Find the power dissipated by the resistors.
(b) Find the power supplied by the voltage sources. (c) Find the power dissipated by the resistors. in series with a
in series with a  carbon-zinc dry cell having a
carbon-zinc dry cell having a  internal resistance. The load resistance is
internal resistance. The load resistance is  (a) Draw a circuit diagram of the toy and its batteries. (b) What current flows? (c) How much power is supplied to the load? (d) What is the internal resistance of the dry cell if it goes bad, resulting in only
(a) Draw a circuit diagram of the toy and its batteries. (b) What current flows? (c) How much power is supplied to the load? (d) What is the internal resistance of the dry cell if it goes bad, resulting in only  being supplied to the load?
being supplied to the load? in the preceding problem.
in the preceding problem. alkaline cell having an internal resistance of
alkaline cell having an internal resistance of  voltmeter across its terminals (see below). (a) What current flows? (b) Find the terminal voltage. (c) To see how close the measured terminal voltage is to the emf, calculate their ratio.
voltmeter across its terminals (see below). (a) What current flows? (b) Find the terminal voltage. (c) To see how close the measured terminal voltage is to the emf, calculate their ratio. capacitor and a variable resistor. Over what range must
capacitor and a variable resistor. Over what range must  ?
? capacitor is charged (by a battery in series with a resistor) to
capacitor is charged (by a battery in series with a resistor) to  of its full voltage. What is the value of the resistance?
of its full voltage. What is the value of the resistance? for a certain camera. (a) If the resistance of the flash lamp is
for a certain camera. (a) If the resistance of the flash lamp is  during discharge, what is the size of the capacitor supplying its energy? (b) What is the time constant for charging the capacitor, if the charging resistance is
during discharge, what is the size of the capacitor supplying its energy? (b) What is the time constant for charging the capacitor, if the charging resistance is  ?
? capacitor can be connected in series or parallel, as can a
capacitor can be connected in series or parallel, as can a  – and a
– and a  resistor. Calculate the four
resistor. Calculate the four  resistor, an uncharged
resistor, an uncharged  capacitor, and a
capacitor, and a  emf are connected in series. (a) What is the initial current? (b) What is the
emf are connected in series. (a) What is the initial current? (b) What is the  what is the resistance of the path through the patient? (You may neglect the capacitance of the patient and the resistance of the defibrillator.) (b) If the initial voltage is
what is the resistance of the path through the patient? (You may neglect the capacitance of the patient and the resistance of the defibrillator.) (b) If the initial voltage is  how long does it take to decline to
how long does it take to decline to  ?
? to be able to measure variations in voltage over small time intervals. (a) If the resistance of the circuit (due mostly to that of the patient’s chest) is
to be able to measure variations in voltage over small time intervals. (a) If the resistance of the circuit (due mostly to that of the patient’s chest) is  what is the maximum capacitance of the circuit? (b) Would it be difficult in practice to limit the capacitance to less than the value found in (a)?
what is the maximum capacitance of the circuit? (b) Would it be difficult in practice to limit the capacitance to less than the value found in (a)? capacitor through a
capacitor through a  resistor to
resistor to  of its final voltage.
of its final voltage. then a very brief flash of light produced by an
then a very brief flash of light produced by an  capacitor, what is the resistance in the flash tube?
capacitor, what is the resistance in the flash tube? ac through a resistance of
ac through a resistance of  ? (b) What current flows?
? (b) What current flows? short circuit through a
short circuit through a  resistance?
resistance? ; (b) if she is standing barefoot on wet grass and has a resistance of only
; (b) if she is standing barefoot on wet grass and has a resistance of only 
 applied directly to the heart may cause ventricular fibrillation. If the resistance of the exposed heart is
applied directly to the heart may cause ventricular fibrillation. If the resistance of the exposed heart is  what is the smallest voltage that poses this danger? (b) Does your answer imply that special electrical safety precautions are needed?
what is the smallest voltage that poses this danger? (b) Does your answer imply that special electrical safety precautions are needed? ? (b) What would the average power be if the voltage were
? (b) What would the average power be if the voltage were  through a patient’s torso for
through a patient’s torso for  in an attempt to restore normal beating. (a) How much charge passed? (b) What voltage was applied if
in an attempt to restore normal beating. (a) How much charge passed? (b) What voltage was applied if  of energy was dissipated? (c) What was the path’s resistance? (d) Find the temperature increase caused in the
of energy was dissipated? (c) What was the path’s resistance? (d) Find the temperature increase caused in the  of affected tissue.
of affected tissue. of surrounding materials, assuming their specific heat capacity is
of surrounding materials, assuming their specific heat capacity is  and that it takes
and that it takes  for a circuit breaker to interrupt the current. Is this likely to be damaging?
for a circuit breaker to interrupt the current. Is this likely to be damaging? capacitors connected in series. (a) What is the equivalent capacitance of the circuit? (b) What is the
capacitors connected in series. (a) What is the equivalent capacitance of the circuit? (b) What is the  of the initial value once the switch is closed?
of the initial value once the switch is closed? and an internal resistance of
and an internal resistance of  (a) Find the equivalent resistance of the circuit and the current out of the battery. (b) Find the current through each resistor. (c) Find the potential drop across each resistor. (d) Find the power dissipated by each resistor. (e) Find the total power supplied by the batteries.
(a) Find the equivalent resistance of the circuit and the current out of the battery. (b) Find the current through each resistor. (c) Find the potential drop across each resistor. (d) Find the power dissipated by each resistor. (e) Find the total power supplied by the batteries. thick, of the same area and a dielectric constant of
thick, of the same area and a dielectric constant of  The homemade capacitor is connected in series with a
The homemade capacitor is connected in series with a  resistor, a switch, and a
resistor, a switch, and a  voltage source. (a) What is the
voltage source. (a) What is the  The homemade resistor is place in series with a switch, a
The homemade resistor is place in series with a switch, a  power source. (a) What is the
power source. (a) What is the  of circuit (a) in terms of
of circuit (a) in terms of 
 and
and  ? (b) What is the output voltage
? (b) What is the output voltage  and
and  resistors are connect in series with an AAA battery with a rating of
resistors are connect in series with an AAA battery with a rating of  (a) In order for the terminal voltage of the battery to be equal to the emf of the battery, what should the resistance of the variable resistor be adjusted to? (b) In order to get the maximum current from the battery, what should the resistance variable resistor be adjusted to? (c) In order for the maximum power output of the battery to be reached, what should the resistance of the variable resistor be set to?
(a) In order for the terminal voltage of the battery to be equal to the emf of the battery, what should the resistance of the variable resistor be adjusted to? (b) In order to get the maximum current from the battery, what should the resistance variable resistor be adjusted to? (c) In order for the maximum power output of the battery to be reached, what should the resistance of the variable resistor be set to? Show that the total energy supplied by the battery while charging the battery is equal to
Show that the total energy supplied by the battery while charging the battery is equal to 
 are connected in parallel to produce a total resistance of
are connected in parallel to produce a total resistance of  (a) What is the value of the second resistance? (b) What is unreasonable about this result? (c) Which assumptions are unreasonable or inconsistent?
(a) What is the value of the second resistance? (b) What is unreasonable about this result? (c) Which assumptions are unreasonable or inconsistent? are connected in series to produce a total resistance of
are connected in series to produce a total resistance of  (a) What is the value of the second resistance? (b) What is unreasonable about this result? (c) Which assumptions are unreasonable or inconsistent?
(a) What is the value of the second resistance? (b) What is unreasonable about this result? (c) Which assumptions are unreasonable or inconsistent? in the preceding problem.
in the preceding problem. during which it produces an average
during which it produces an average  capacitor charged to
capacitor charged to  resistor. (a) Find the time constant. (b) Calculate the temperature increase of the resistor, given that its mass is
resistor. (a) Find the time constant. (b) Calculate the temperature increase of the resistor, given that its mass is  and its specific heat is
and its specific heat is  noting that most of the thermal energy is retained in the short time of the discharge. (c) Calculate the new resistance, assuming it is pure carbon. (d) Does this change in resistance seem significant?
noting that most of the thermal energy is retained in the short time of the discharge. (c) Calculate the new resistance, assuming it is pure carbon. (d) Does this change in resistance seem significant? capacitors through an equivalent resistance of
capacitors through an equivalent resistance of  (a) What is the current through the external resistor, which has a resistance of
(a) What is the current through the external resistor, which has a resistance of  and gives a full scale reading when a
and gives a full scale reading when a  current runs through it. The galvanometer is to be used to make an ammeter that has a full scale reading of
current runs through it. The galvanometer is to be used to make an ammeter that has a full scale reading of  as shown below. Recall that an ammeter is connected in series with the circuit of interest, so all
as shown below. Recall that an ammeter is connected in series with the circuit of interest, so all  as shown below. Recall that a voltmeter is connected in parallel with the component of interest, so the meter must have a high resistance or it will change the current running through the component. (a) What is the potential drop across the series resistor in the meter? (b) What is the resistance of the parallel resistor?
as shown below. Recall that a voltmeter is connected in parallel with the component of interest, so the meter must have a high resistance or it will change the current running through the component. (a) What is the potential drop across the series resistor in the meter? (b) What is the resistance of the parallel resistor?
 The switch is closed and after a long time the capacitor is fully charged. (a) What is the current through each resistor a long time after the switch is closed? (b) What is the voltage across each resistor a long time after the switch is closed? (c) What is the voltage across the capacitor a long time after the switch is closed? (d) What is the charge on the capacitor a long time after the switch is closed? (e) The switch is then opened. The capacitor discharges through the resistors. How long from the time before the current drops to one fifth of the initial value?
The switch is closed and after a long time the capacitor is fully charged. (a) What is the current through each resistor a long time after the switch is closed? (b) What is the voltage across each resistor a long time after the switch is closed? (c) What is the voltage across the capacitor a long time after the switch is closed? (d) What is the charge on the capacitor a long time after the switch is closed? (e) The switch is then opened. The capacitor discharges through the resistors. How long from the time before the current drops to one fifth of the initial value? seconds. You buy one to use in your dorm room, but you are worried that you will overload the circuit and trip the
seconds. You buy one to use in your dorm room, but you are worried that you will overload the circuit and trip the 
 incandescent lamps and a
incandescent lamps and a  space heater. (a) What is the power rating of the immersion heater? (b) Will it trip the breaker when everything is turned on? (c) If it you replace the incandescent bulbs with
space heater. (a) What is the power rating of the immersion heater? (b) Will it trip the breaker when everything is turned on? (c) If it you replace the incandescent bulbs with  LED, will the breaker trip when everything is turned on?
LED, will the breaker trip when everything is turned on? galvanometer having a
galvanometer having a  sensitivity (the same as the one discussed in the text) to allow it to be used as a voltmeter with a
sensitivity (the same as the one discussed in the text) to allow it to be used as a voltmeter with a  full-scale reading. Include a circuit diagram with your solution.
full-scale reading. Include a circuit diagram with your solution. galvanometer having a
galvanometer having a  sensitivity (the same as the one discussed in the text) to allow it to be used as an ammeter with a
sensitivity (the same as the one discussed in the text) to allow it to be used as an ammeter with a  full-scale reading. Include a circuit diagram with your solution.
full-scale reading. Include a circuit diagram with your solution.

 . But before this useful result can be realised, we must first explore a few nuanced points to explain why the technique works.
. But before this useful result can be realised, we must first explore a few nuanced points to explain why the technique works.
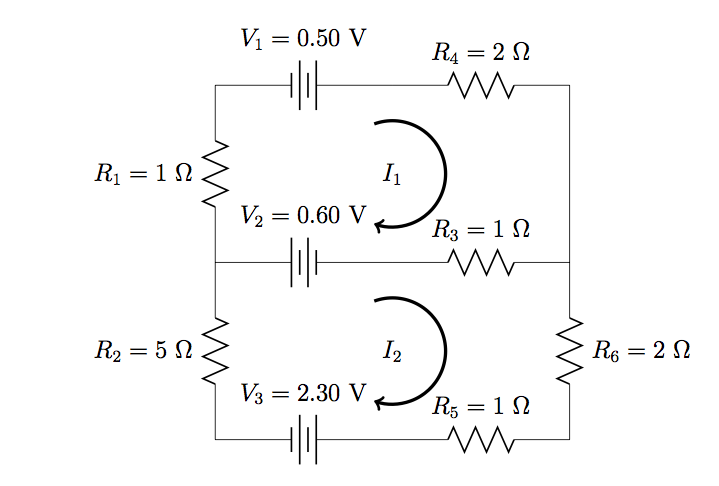
 ), and
), and (there is a voltage drop across
(there is a voltage drop across 


![\[I_1=0.20~\mathrm{A},~~~I_2=-0.30~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9964940c29fa03f8eacf4ac01f641745_l3.svg "Rendered by QuickLaTeX.com")
 to the right, the current in the top branch must be
to the right, the current in the top branch must be  to the right, and the current in the centre branch must be
to the right, and the current in the centre branch must be  to the left.
to the left. for the potential difference with respect to the
for the potential difference with respect to the  , then substituting into our loop rule expressions, we skip right to applying the loop rule for each mesh current and solve the system of fewer equations with fewer unknown variables.
, then substituting into our loop rule expressions, we skip right to applying the loop rule for each mesh current and solve the system of fewer equations with fewer unknown variables.
 , where
, where  are
are  -matrix. When
-matrix. When 
 is the
is the  is the matrix formed by replacing the
is the matrix formed by replacing the ![\[I_1=\frac{\mathrm{det}(\mathbf{R}_1)}{\mathrm{det}(\mathbf{R})}=\frac{\left|\begin{array}{cc}-1.10~\mathrm{V}&1~\Omega\\2.90~\mathrm{V}&-9~\Omega\end{array}\right|}{\left|\begin{array}{cc}-4~\Omega&1~\Omega\\1~\Omega&-9~\Omega\end{array}\right|}=\frac{9.90~\mathrm{V}\cdot\Omega-2.90~\mathrm{V}\cdot\Omega}{36~\Omega^2-1~\Omega^2}=0.20~\mathrm{A},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-48d8fb3aad522bceb6d92cde7618cd6e_l3.svg "Rendered by QuickLaTeX.com")
![\[I_2=\frac{\mathrm{det}(\mathbf{R}_2)}{\mathrm{det}(\mathbf{R})}=\frac{\left|\begin{array}{cc}-4~\Omega&-1.10~\mathrm{V}\\1~\Omega&2.90~\mathrm{V}\end{array}\right|}{\left|\begin{array}{cc}-4~\Omega&1~\Omega\\1~\Omega&-9~\Omega\end{array}\right|}=\frac{-11.6~\mathrm{V}\cdot\Omega+1.10~\mathrm{V}\cdot\Omega}{35~\Omega^2-1~\Omega^2}=-0.30~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4803d966ba6d91bf7b29361aa64d8fd0_l3.svg "Rendered by QuickLaTeX.com")
 , where
, where  was the mesh current in the loop of interest and
was the mesh current in the loop of interest and  was the adjacent mesh current. Indeed, in general when all the mesh current loops of a circuit are defined as pointing in the same direction—i.e. either clockwise or counterclockwise—the potential differences across all resistors
was the adjacent mesh current. Indeed, in general when all the mesh current loops of a circuit are defined as pointing in the same direction—i.e. either clockwise or counterclockwise—the potential differences across all resistors  located between adjacent mesh current loops are
located between adjacent mesh current loops are  , where
, where  the potential difference across every voltage source and resistor will be:
the potential difference across every voltage source and resistor will be: when
when  when only
when only  , and
, and
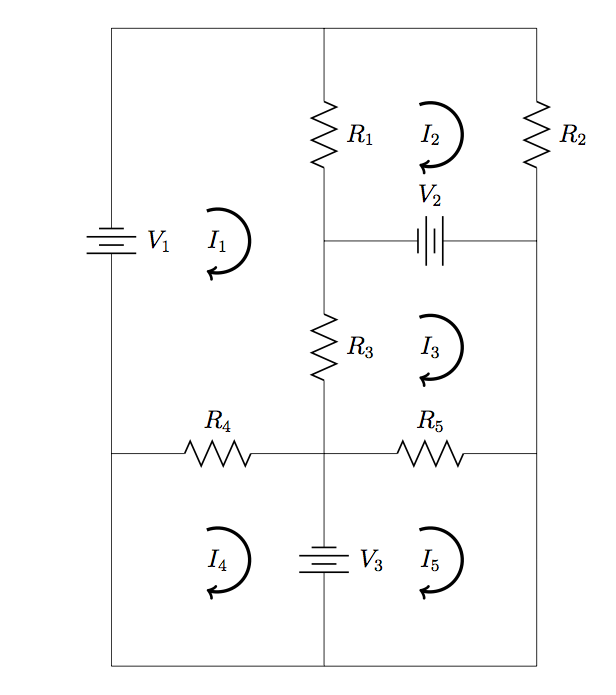

![\[\begin{array}{rccccc}V_1=&-(R_1+R_3+R_4)I_1&+R_1I_2&+R_3I_3&+R_4I_4&+0,\\V_2=&R_1I_1&-(R_1+R_2)I_2&+0&+0&+0,\\-V_2=&R_3I_1&+0&-(R_3+R_5)I_3&+0&+R_5I_5,\\-V_3=&R_4I_1&+0&+0&-R_4I_4&+0,\\V_3=&0&+0&+R_5I_3&+0&-R_5I_5.\end{array}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ade02c9effcc118a2d96258816b33cbb_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathbf{V}=\left(\begin{array}{c}V_1\\V_2\\-V_2\\-V_3\\V_3\end{array}\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-153885c8b26fdeaf4e4b238aa10171b1_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathbf{R}=\left(\begin{array}{ccccc}-(R_1+R_3+R_4)&R_1&R_3&R_4&0\\R_1&-(R_1+R_2)&0&0&0\\R_3&0&-(R_3+R_5)&0&R_5\\R_4&0&0&-R_4&0\\0&0&R_5&0&-R_5\end{array}\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-78a66446908a45f64b15bfc8908179a4_l3.svg "Rendered by QuickLaTeX.com")
 is negative the sum of voltage rises and drops due to voltage sources around each mesh current loop
is negative the sum of voltage rises and drops due to voltage sources around each mesh current loop  is negative the sum of the resistances of the resistors around mesh current loop
is negative the sum of the resistances of the resistors around mesh current loop  is the sum of resistances of the resistors through which any mesh current loop
is the sum of resistances of the resistors through which any mesh current loop  . Similarly, the equation for loop
. Similarly, the equation for loop  for each voltage source
for each voltage source 
 that
that  for each voltage source
for each voltage source 
 that
that  for each resistor
for each resistor 
 that
that 
 is the sum
is the sum  for each resistor
for each resistor 
 passed by a loop
passed by a loop 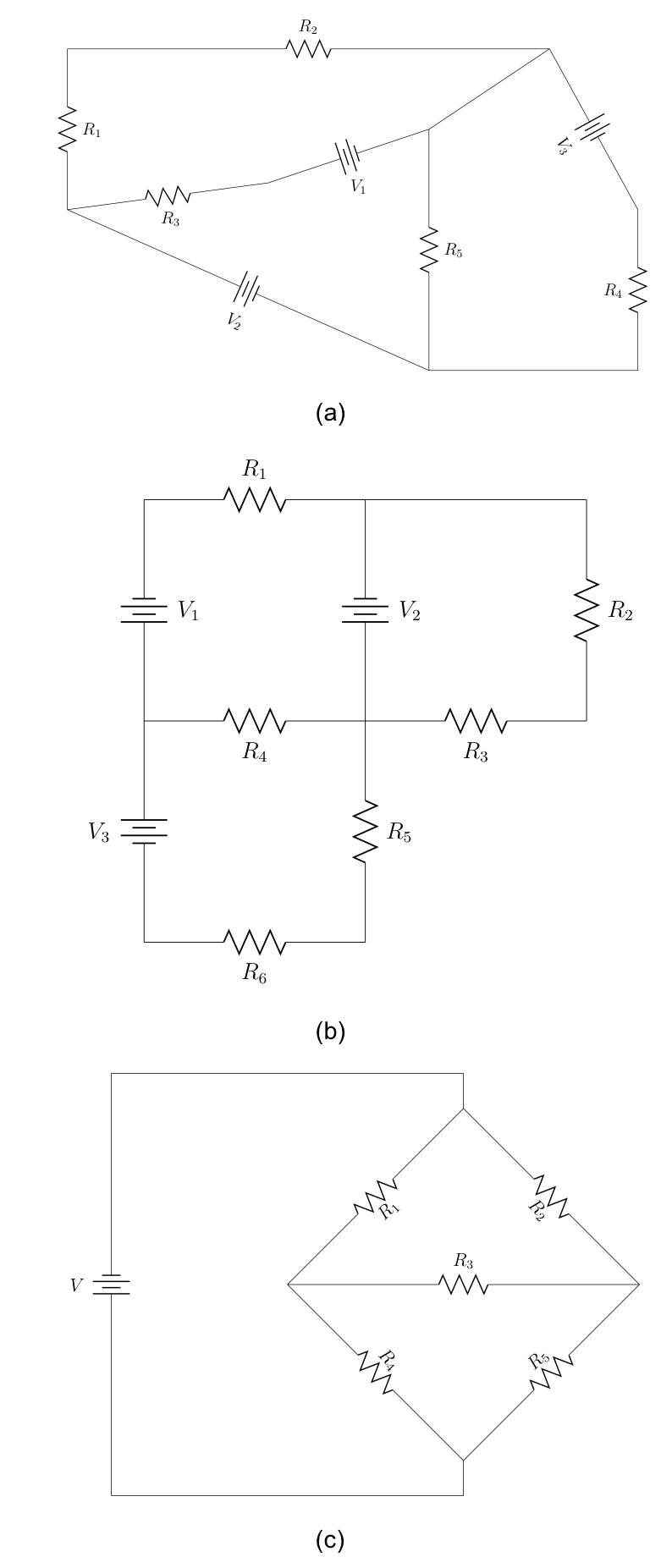

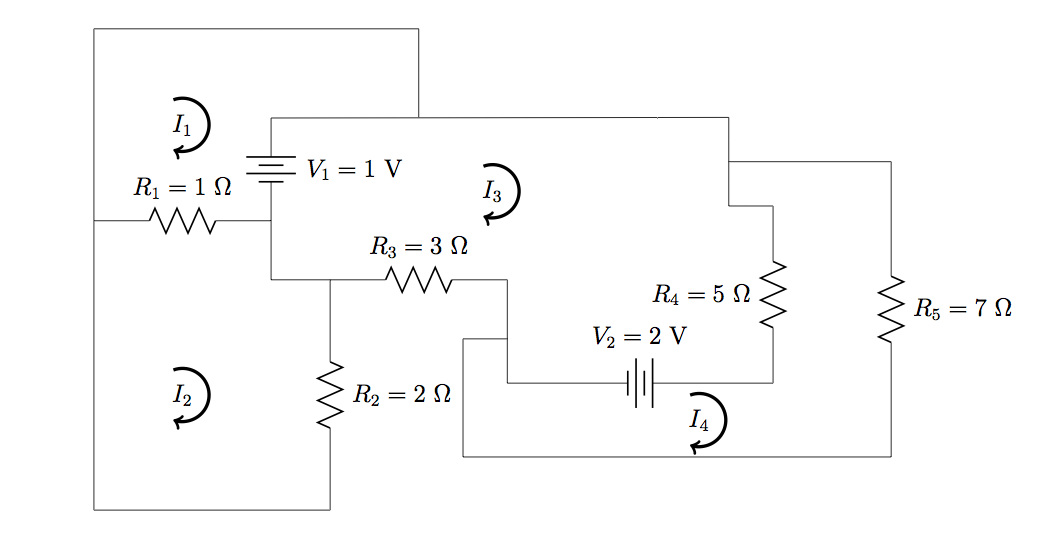

![\[\mathbf{V}=\left(\begin{array}{c}V_1\\0\\-V_1+V_2\\-V_2\end{array}\right)=\left(\begin{array}{c}1\\0\\1\\-2\end{array}\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-62db9f63024cd32fbb40b037c213979e_l3.svg "Rendered by QuickLaTeX.com")



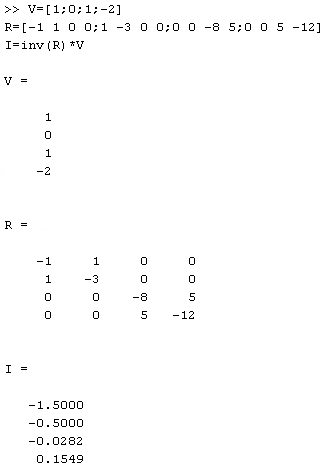
 to the right,
to the right, upward,
upward, to the right,
to the right, upward,
upward, downward,
downward, upward.
upward.![\[P_{\mathrm{supplied}}=\sum_iI_{V_i}V_i=1.4718~\mathrm{W}+0.3662~\mathrm{W}=1.8380~\mathrm{W},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-35b8036ebab70c4bad376dabd7999efa_l3.svg "Rendered by QuickLaTeX.com")



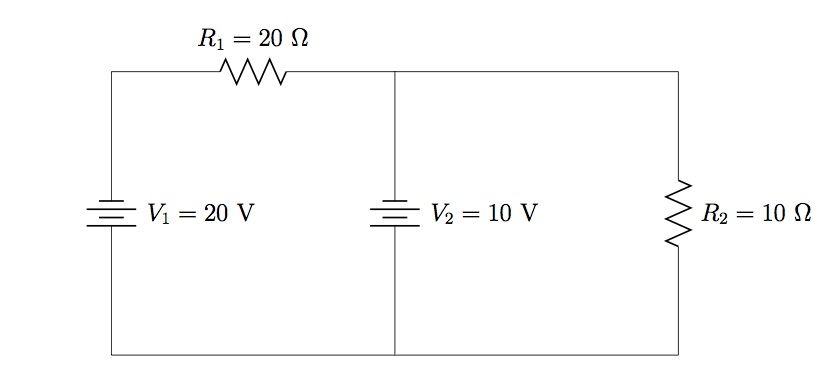
 Thus,
Thus,![\[I_{R_1}(V_1)=\frac{V_1}{R_1}=1~\mathrm{A}~\mathrm{to~left},~~~~~I_{R_2}(V_1)=\frac{0}{R_2}=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-511f4fb3e1b270509237be2c826a7d9e_l3.svg "Rendered by QuickLaTeX.com")
![\[I_{R_1}(V_2)=\frac{V_2}{R_1}=0.5~\mathrm{A}~\mathrm{to~right},~~~~~I_{R_2}(V_2)=\frac{V_2}{R_2}=1~\mathrm{A}~\mathrm{upward}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e5d75353af661681a48637b50bdf20ad_l3.svg "Rendered by QuickLaTeX.com")
![\[I_{R_1}=0.5~\mathrm{A}~\mathrm{to~left},~~~~~I_{R_2}=1~\mathrm{A}~\mathrm{upward}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-85dcd7ebb181d898e5ea241b0b2008f8_l3.svg "Rendered by QuickLaTeX.com")
 and points downwards, since
and points downwards, since 
![\[P_{\mathrm{supplied}}=\sum_iI_{V_i}V_i=(0.5~\mathrm{A})(20~\mathrm{V})+(0.5~\mathrm{A})(10~\mathrm{V})=10~\mathrm{W}+5~\mathrm{W}=15~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ae52e298d504eacd21fc5d1b356b9b2a_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{dissipated}}=\sum_iI_{R_i}^2R_i=(0.5~\mathrm{A})^2(20~\Omega)+(1~\mathrm{A})^2(10~\Omega)=5~\mathrm{W}+10~\mathrm{W}=15~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fef94adfd16f490a22740920f7f3f11c_l3.svg "Rendered by QuickLaTeX.com")
 source were replaced by a short? What if its voltage were doubled to
source were replaced by a short? What if its voltage were doubled to  ? Explain.
? Explain.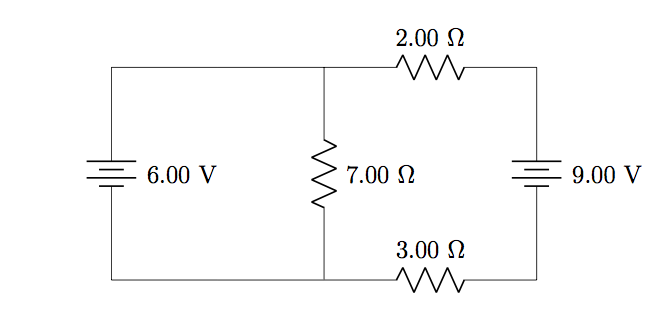

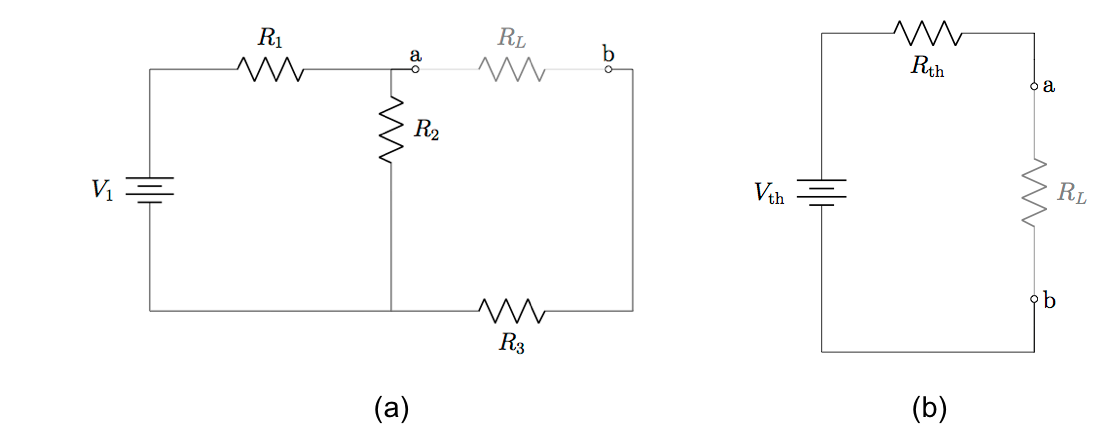



 .
.![\[I=\frac{V_1}{R_1+R_2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b4474e9fabae01d6328552d0691e2706_l3.svg "Rendered by QuickLaTeX.com")
![\[V_{R_2}=R_2I=\frac{R_2V_1}{R_1+R_2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4b23737c06725e9406391e94dd619c11_l3.svg "Rendered by QuickLaTeX.com")
![\[V_{\mathrm{th}}=V_{R_2}=\frac{R_2V_1}{R_1+R_2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-44ad69d22a14ab539dac6ddcb91e5d59_l3.svg "Rendered by QuickLaTeX.com")
 first write
first write![\[R_{12}=\left(\frac{1}{R_1}+\frac{1}{R_2}\right)^{-1}=\frac{R_1R_2}{R_1+R_2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-299b01eb56b9c53bf1097214b1d3af50_l3.svg "Rendered by QuickLaTeX.com")
![\[R_{\mathrm{th}}=R_{12}+R_3=\frac{R_1R_2}{R_1+R_2}+R_3.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5d1fac446c5ea68f8badfbf3b5111d3a_l3.svg "Rendered by QuickLaTeX.com")
![\[-(V_1-R_1I)=-V_1+\frac{R_1V_1}{R_1+R_2}=\frac{R_2V_1}{R_1+R_2}=R_{\mathrm{th}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8846022e45862af5d70c249626aeb5fb_l3.svg "Rendered by QuickLaTeX.com")
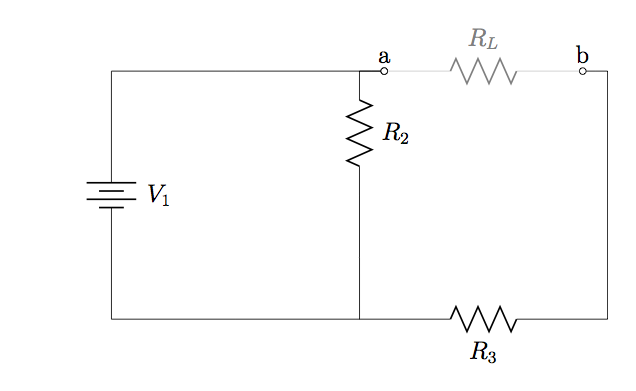
![\[\frac{dP_L}{dR_L}=\frac{V_{\mathrm{th}}^2}{(R_{\mathrm{th}}+R_L)^2}-\frac{2R_LV_{\mathrm{th}}^2}{(R_{\mathrm{th}}+R_L)^3}=0\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3ebddaaadf91ae1a91177836ac53a002_l3.svg "Rendered by QuickLaTeX.com")
![\[\Rightarrow 1-\frac{2R_L}{R_{\mathrm{th}}+R_L}=0\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7a2ab6d0c26305310d89a68c3783e3e8_l3.svg "Rendered by QuickLaTeX.com")
![\[\Rightarrow R_L=R_{\mathrm{th}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e7166167758a811b5213b61c212b9f28_l3.svg "Rendered by QuickLaTeX.com")
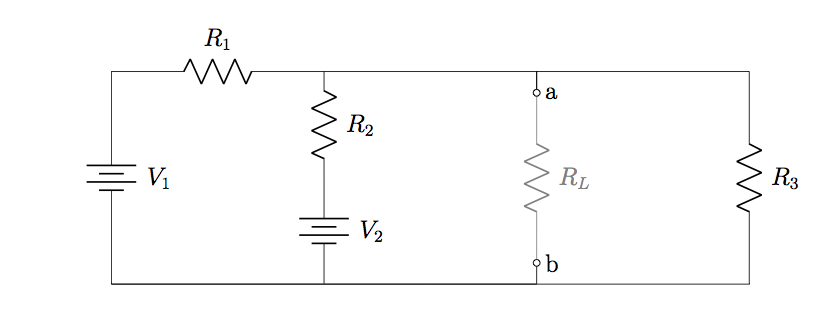
 for the Thévenin equivalent circuit calculated with respect to
for the Thévenin equivalent circuit calculated with respect to  To find this, we first determine
To find this, we first determine  the other, passing through
the other, passing through  using Ohm’s law. Note that we do not actually need to calculate any other currents, since
using Ohm’s law. Note that we do not actually need to calculate any other currents, since  the potential difference between
the potential difference between  regardless which branch is taken.
regardless which branch is taken. (see Equation
(see Equation  (cf. Equation
(cf. Equation ![\[\left(\begin{array}{c}-V_1+V_2\\-V_2\end{array}\right)=\left(\begin{array}{cc}-(R_1+R_2)&R_2\\R_2&-(R_2+R_3)\end{array}\right)\left(\begin{array}{c}I_1\\I_2\end{array}\right),\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f387a8e47d1e532c078948db5516ffb8_l3.svg "Rendered by QuickLaTeX.com")

![\[V_{\mathrm{th}}=R_3I_2=\frac{R_3(V_2R_1+V_1R_2)}{R_1R_2+R_1R_3+R_2R_3}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-265267cad54d2b27094933f31dd5b14c_l3.svg "Rendered by QuickLaTeX.com")
![\[R_{\mathrm{th}}=\left(\frac{1}{R_1}+\frac{1}{R_2}+\frac{1}{R_3}\right)^{-1}=\frac{R_1R_2+R_1R_3+R_2R_3}{R_1R_2R_3}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-463c326f46030c7e20be2c82b21f5735_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{L,\mathrm{max}}=\frac{V_{\mathrm{th}}^2}{4R_{\mathrm{th}}}=\frac{R_1R_2R_3^3(V_2R_1+V_1R_2)^2}{(R_1R_2+R_1R_3+R_2R_3)^3}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1fad99e2ff47b6d39d5850e569528091_l3.svg "Rendered by QuickLaTeX.com")
 is the power dissipated in
is the power dissipated in  The general expression for power dissipated in
The general expression for power dissipated in ![\[I_i=\frac{\mathrm{det}(\mathbf{R}_i)}{\mathrm{det}(\mathbf{R})},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a8ddcf648d0df8c46cfa89e358f47eb4_l3.svg "Rendered by QuickLaTeX.com")



 as the cross product of the velocity and magnetic field, that is,
as the cross product of the velocity and magnetic field, that is,
 —in terms of the force on a charged particle moving in a magnetic field. The magnitude of the force is determined from the definition of the cross product as it relates to the magnitudes of each of the vectors. In other words, the magnitude of the force satisfies
—in terms of the force on a charged particle moving in a magnetic field. The magnitude of the force is determined from the definition of the cross product as it relates to the magnitudes of each of the vectors. In other words, the magnitude of the force satisfies

 ), where
), where  , is sometimes used. The strongest permanent magnets have fields near
, is sometimes used. The strongest permanent magnets have fields near  ; superconducting electromagnets may attain
; superconducting electromagnets may attain  or more. Earth’s magnetic field on its surface is only about
or more. Earth’s magnetic field on its surface is only about  or
or  .
.
 moves through a uniform magnetic field whose magnitude is
moves through a uniform magnetic field whose magnitude is  . The field is directly parallel to the positive
. The field is directly parallel to the positive  (b) in the negative
(b) in the negative  ?
?
 or
or  to calculate the force. The direction of the force is determined by RHR-1.
to calculate the force. The direction of the force is determined by RHR-1.

 degrees. Therefore, the magnitude of the force is:
degrees. Therefore, the magnitude of the force is:
 or
or  direction possible, but not in the
direction possible, but not in the  direction. This should match the mathematical answer. To calculate the force, we use the given charge, velocity, and magnetic field and the definition of the magnetic force in cross-product form to calculate:
direction. This should match the mathematical answer. To calculate the force, we use the given charge, velocity, and magnetic field and the definition of the magnetic force in cross-product form to calculate:
 plane:
plane:



 s—like the tails of arrows). The magnetic force is perpendicular to the velocity, so velocity changes in direction but not magnitude. The result is uniform circular motion. (Note that because the charge is negative, the force is opposite in direction to the prediction of the right-hand rule.)
s—like the tails of arrows). The magnetic force is perpendicular to the velocity, so velocity changes in direction but not magnitude. The result is uniform circular motion. (Note that because the charge is negative, the force is opposite in direction to the prediction of the right-hand rule.) . Noting that the velocity is perpendicular to the magnetic field, the magnitude of the magnetic force is reduced to
. Noting that the velocity is perpendicular to the magnetic field, the magnitude of the magnetic force is reduced to  . Because the magnetic force
. Because the magnetic force  , we have
, we have



 of the helix, which is the distance between adjacent turns. This distance equals the parallel component of the velocity times the period:
of the helix, which is the distance between adjacent turns. This distance equals the parallel component of the velocity times the period:


 bends through a
bends through a  degree region with a uniform magnetic field of
degree region with a uniform magnetic field of  (
(

![\[T=\frac{2\pi m}{qB}=\frac{2\pi\left(6.64\times10^{-27}~\mathrm{kg}\right)}{\left(3.2\times10^{-19}~\mathrm{C}\right)(0.050~\mathrm{T})}=2.6\times10^{-6}~\mathrm{s}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-07379ec3030e1e22c514c3f35d6108ec_l3.svg "Rendered by QuickLaTeX.com")
![\[t=0.25\times2.61\times10^{-6}~\mathrm{s}=6.5\times10^{-7}~\mathrm{s}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-00fce32be7987150ffe2358aee1ba93b_l3.svg "Rendered by QuickLaTeX.com")
 ? (b) Compare this force with the weight
? (b) Compare this force with the weight  of a proton.
of a proton. with a speed of
with a speed of  . At what angle must the magnetic field be from the velocity so that the pitch of the resulting helical motion is equal to the radius of the helix?
. At what angle must the magnetic field be from the velocity so that the pitch of the resulting helical motion is equal to the radius of the helix?

 . The wire is formed from material that contains
. The wire is formed from material that contains  . If the charge carriers move with drift velocity
. If the charge carriers move with drift velocity ![\[I=neAv_d.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d8c0f8973c200f3be1c4b6c87f4559d7_l3.svg "Rendered by QuickLaTeX.com")
 , so the total magnetic force
, so the total magnetic force 




 is suspended in a horizontal plane by a pair of flexible leads (
is suspended in a horizontal plane by a pair of flexible leads ( , which is directed as shown. What are the magnitude and direction of the current in the wire needed to remove the tension in the supporting leads?
, which is directed as shown. What are the magnitude and direction of the current in the wire needed to remove the tension in the supporting leads?
![\[mg=IlB.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-22063141932d6601460ac06e31010577_l3.svg "Rendered by QuickLaTeX.com")
![\[I=\frac{mg}{lB}=\frac{(0.010~\mathrm{kg})(9.8~\mathrm{m/s}^2)}{(0.50~\mathrm{m})(0.50~\mathrm{T})}=0.39~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e3c06843c6b4494c16eed02ed46b2d35_l3.svg "Rendered by QuickLaTeX.com")
 current flowing in the positive
current flowing in the positive  is directed along the positive
is directed along the positive  axis towards the
axis towards the  axis, what is the magnetic force per unit length on the wire?
axis, what is the magnetic force per unit length on the wire? . For part a, since the current and magnetic field are perpendicular in this problem, we can simplify the formula to give us the magnitude and find the direction through the RHR-1. The angle
. For part a, since the current and magnetic field are perpendicular in this problem, we can simplify the formula to give us the magnitude and find the direction through the RHR-1. The angle  . Also, the length can be divided over to the left-hand side to find the force per unit length. For part b, the current times length is written in unit vector notation, as well as the magnetic field. After the cross product is taken, the directionality is evident by the resulting unit vector.
. Also, the length can be divided over to the left-hand side to find the force per unit length. For part b, the current times length is written in unit vector notation, as well as the magnetic field. After the cross product is taken, the directionality is evident by the resulting unit vector.
![\[frac{\vec{\mathbf{F}}}{l}&=&1.5\hat{\mathbf{k}}~\mathrm{N/m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e2da00e9c90a1abfa31c9fdb22fb57af_l3.svg "Rendered by QuickLaTeX.com")

 direction?
direction?
![\[dF=IB\sin\theta dl.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4080c64c4d434a7e477c3678cf1a39ce_l3.svg "Rendered by QuickLaTeX.com")

 . This results in:
. This results in:![\[F=IBR\int_0^{\pi}\sin\theta d\theta=IBR(-\cos\pi+\cos0)=2IBR.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-727d7bdc9cd9727944ccf0b458884c0d_l3.svg "Rendered by QuickLaTeX.com")
![\[F=IBR\int_{\pi}^{0}\sin\theta d\theta=IBR(-\cos0+\cos\pi)=-2IBR.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2b2ef1ffc4c2f3f52159472e9e3908a1_l3.svg "Rendered by QuickLaTeX.com")

 . The magnetic force on a straight current-carrying wire of length
. The magnetic force on a straight current-carrying wire of length  . To find the net force on the loop, we have to apply this equation to each of the four sides. The force on side
. To find the net force on the loop, we have to apply this equation to each of the four sides. The force on side 



 has been obtained for a rectangular loop, it is far more general and holds for current-carrying loops of arbitrary shapes; that is, there is no net force on a current loop in a uniform magnetic field.
has been obtained for a rectangular loop, it is far more general and holds for current-carrying loops of arbitrary shapes; that is, there is no net force on a current loop in a uniform magnetic field.
 and
and  . Since they have the same line of action and are equal and opposite, the sum of their torques about any axis is zero (see
. Since they have the same line of action and are equal and opposite, the sum of their torques about any axis is zero (see  and
and  . Let’s calculate the torques around the axis that passes through point
. Let’s calculate the torques around the axis that passes through point  from side
from side  and
and  , respectively, so the net torque on the loop is
, respectively, so the net torque on the loop is

 is the area of the loop.
is the area of the loop. is known as its
is known as its  . Actually, the magnetic dipole moment is a vector that is defined as
. Actually, the magnetic dipole moment is a vector that is defined as



 . (a) What is the magnitude of its magnetic dipole moment? (b) If the dipole is oriented at
. (a) What is the magnitude of its magnetic dipole moment? (b) If the dipole is oriented at  .
.![\[\mu=IA=(2.0\times10^{-3}~\mathrm{A})(\pi(0.02~\mathrm{m})^2)=2.5\times10^{-6}~\mathrm{A}\cdot\mathrm{m}^2\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5ce0e02d79ec9fbe193369e51c6d458c_l3.svg "Rendered by QuickLaTeX.com")










 and
and  respectively. (a) What must the velocity of the electron beam be to traverse the crossed fields undeflected? If the electric field is turned off, (b) what is the acceleration of the electron beam and (c) what is the radius of the circular motion that results?
respectively. (a) What must the velocity of the electron beam be to traverse the crossed fields undeflected? If the electric field is turned off, (b) what is the acceleration of the electron beam and (c) what is the radius of the circular motion that results?![\[v_{\mathrm{d}}=\frac{E}{B}=\frac{6\times10^3~\mathrm{N/C}}{2\times10^{-3}~\mathrm{T}}=3\times10^6~\mathrm{m/s}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4247acbc1c1e16603570f57a2b633a74_l3.svg "Rendered by QuickLaTeX.com")

![\[r=\frac{mv}{qB}=\frac{(9.1\times10^{-31}~\mathrm{kg})(3\times10^{6}~\mathrm{m/s})}{(1.6\times10^{-19}~\mathrm{C})(2\times10^{-3}~\mathrm{T})}=8.5\times10^{-3}~\mathrm{m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ee68c37d2ab01a09e1b1752993118082_l3.svg "Rendered by QuickLaTeX.com")
 . The ribbon carries a current of
. The ribbon carries a current of  from left to right, and it lies in a uniform magnetic field of magnitude
from left to right, and it lies in a uniform magnetic field of magnitude  electrons per cubic meter for silver, find the Hall potential between the edges of the ribbon.
electrons per cubic meter for silver, find the Hall potential between the edges of the ribbon.
![\[V=\frac{IBl}{neA}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5528b0a212b3a6e8e3c2f442b7441e2c_l3.svg "Rendered by QuickLaTeX.com")

 electrons per cubic meter, which is
electrons per cubic meter, which is  thick. What is the magnetic field when
thick. What is the magnetic field when  and the Hall potential is (a)
and the Hall potential is (a)  and (b)
and (b) 
 since any ion with a different velocity is deflected preferentially by either the electric or magnetic force, and ultimately blocked from the next stage. They then enter a uniform magnetic field
since any ion with a different velocity is deflected preferentially by either the electric or magnetic force, and ultimately blocked from the next stage. They then enter a uniform magnetic field  where they travel in a circular path whose radius
where they travel in a circular path whose radius 
 and the radius
and the radius 
 , measured values of
, measured values of  .
. . The performance of the refrigerator is severely hampered if even a minute leak between its various components occurs. Consequently, before it is cooled down to the desired temperature, the refrigerator is subjected to a leak test. A small quantity of gaseous helium is injected into one of its compartments, while an adjacent, but supposedly isolated, compartment is connected to a high-vacuum pump to which a mass spectrometer is attached. A heated filament ionizes any helium atoms evacuated by the pump. The detection of these ions by the spectrometer then indicates a leak between the two compartments of the dilution refrigerator.
. The performance of the refrigerator is severely hampered if even a minute leak between its various components occurs. Consequently, before it is cooled down to the desired temperature, the refrigerator is subjected to a leak test. A small quantity of gaseous helium is injected into one of its compartments, while an adjacent, but supposedly isolated, compartment is connected to a high-vacuum pump to which a mass spectrometer is attached. A heated filament ionizes any helium atoms evacuated by the pump. The detection of these ions by the spectrometer then indicates a leak between the two compartments of the dilution refrigerator. and
and  , called
, called 
 , where
, where 

 , the polarity of the dees is reversed. When the particle reenters the gap,
, the polarity of the dees is reversed. When the particle reenters the gap, 

 . Above this energy, relativistic effects become important, which causes the orbital period to increase with the radius. Up to energies of several hundred
. Above this energy, relativistic effects become important, which causes the orbital period to increase with the radius. Up to energies of several hundred  long and accelerates electrons and positrons (positively charged electrons) to energies of
long and accelerates electrons and positrons (positively charged electrons) to energies of  . The synchrotron is constructed so that its bending magnetic field increases with particle speed in such a way that the particles stay in an orbit of fixed radius. The world’s highest-energy synchrotron is located at CERN, which is on the Swiss-French border near Geneva. CERN has been of recent interest with the verified discovery of the Higgs Boson. This synchrotron can accelerate beams of approximately
. The synchrotron is constructed so that its bending magnetic field increases with particle speed in such a way that the particles stay in an orbit of fixed radius. The world’s highest-energy synchrotron is located at CERN, which is on the Swiss-French border near Geneva. CERN has been of recent interest with the verified discovery of the Higgs Boson. This synchrotron can accelerate beams of approximately  protons to energies of about
protons to energies of about  .
. ,
,  has a radius of
has a radius of  and a magnetic field of
and a magnetic field of  . (a) What is the period of revolution of the alpha-particles? (b) What is their maximum kinetic energy?
. (a) What is the period of revolution of the alpha-particles? (b) What is their maximum kinetic energy?![\[T=\frac{2\pi m}{qB}=\frac{2\pi\left(6.64\times10^{-27}~\mathrm{kg}\right)}{\left(3.2\times10^{-19}~\mathrm{C}\right)(1.8~\mathrm{T})}=7.3\times10^{-8}~\mathrm{s}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5ca85193aa1b8d6610367e0648ce3779_l3.svg "Rendered by QuickLaTeX.com")

 using a magnetic field of
using a magnetic field of  . What is the required radius of the cyclotron?
. What is the required radius of the cyclotron? unit of the magnetic field strength;
unit of the magnetic field strength; 










 The force is perpendicular to the plane formed by
The force is perpendicular to the plane formed by 



 on a current-carrying loop of any shape in a uniform magnetic field is calculated using
on a current-carrying loop of any shape in a uniform magnetic field is calculated using  is the magnetic dipole moment and
is the magnetic dipole moment and  the current in the loop
the current in the loop  or
or 

 b.
b.  c.
c.  d.
d. 
 toward the south; b.
toward the south; b. 
 b.
b. 


 over Earth’s south magnetic pole, where the
over Earth’s south magnetic pole, where the  magnetic field points straight up. What are the direction and the magnitude of the magnetic force on the plane? (b) Discuss whether the value obtained in part (a) implies this is a significant or negligible effect.
magnetic field points straight up. What are the direction and the magnitude of the magnetic force on the plane? (b) Discuss whether the value obtained in part (a) implies this is a significant or negligible effect. experiences a magnetic force of
experiences a magnetic force of  What is the strength of the magnetic field if there is a
What is the strength of the magnetic field if there is a  in a
in a  magnetic field experiences a magnetic force of
magnetic field experiences a magnetic force of  What angle does the velocity of the electron make with the magnetic field? There are two answers.
What angle does the velocity of the electron make with the magnetic field? There are two answers. What is the greatest the charge can be if it moves at a maximum speed of
What is the greatest the charge can be if it moves at a maximum speed of  in Earth’s field? (b) Discuss whether it would be difficult to limit the charge to less than the value found in (a) by comparing it with typical static electricity and noting that static is often absent.
in Earth’s field? (b) Discuss whether it would be difficult to limit the charge to less than the value found in (a) by comparing it with typical static electricity and noting that static is often absent. perpendicular to Earth’s magnetic field at an altitude where the field strength is
perpendicular to Earth’s magnetic field at an altitude where the field strength is  What is the radius of the circular path the electron follows?
What is the radius of the circular path the electron follows? in a circular path
in a circular path  in radius? Antiprotons have the same mass as protons but the opposite (negative) charge. (b) Is this field strength obtainable with today’s technology or is it a futuristic possibility?
in radius? Antiprotons have the same mass as protons but the opposite (negative) charge. (b) Is this field strength obtainable with today’s technology or is it a futuristic possibility? travels at
travels at  perpendicular to a
perpendicular to a  magnetic field, which makes it move in a circular arc with a
magnetic field, which makes it move in a circular arc with a  radius. What positive charge is on the ion? (b) What is the ratio of this charge to the charge of an electron? (c) Discuss why the ratio found in (b) should be an integer.
radius. What positive charge is on the ion? (b) What is the ratio of this charge to the charge of an electron? (c) Discuss why the ratio found in (b) should be an integer. in a direction perpendicular to Earth’s field, which has a strength of
in a direction perpendicular to Earth’s field, which has a strength of  (a) What strength electric field must be applied perpendicular to the Earth’s field to make the electron moves in a straight line? (b) If this is done between plates separated by
(a) What strength electric field must be applied perpendicular to the Earth’s field to make the electron moves in a straight line? (b) If this is done between plates separated by  what is the voltage applied? (Note that TVs are usually surrounded by a ferromagnetic material to shield against external magnetic fields and avoid the need for such a correction.)
what is the voltage applied? (Note that TVs are usually surrounded by a ferromagnetic material to shield against external magnetic fields and avoid the need for such a correction.) ? (b) Find the radius of curvature of the path of a proton accelerated through this potential in a
? (b) Find the radius of curvature of the path of a proton accelerated through this potential in a  field and compare this with the radius of curvature of an electron accelerated through the same potential.
field and compare this with the radius of curvature of an electron accelerated through the same potential.
 travels in a circular path of radius
travels in a circular path of radius  (a) What is the speed of the particle? (b) What is the kinetic energy in electron-volts? (c) Through what potential difference must the particle be accelerated in order to give it this kinetic energy?
(a) What is the speed of the particle? (b) What is the kinetic energy in electron-volts? (c) Through what potential difference must the particle be accelerated in order to give it this kinetic energy? what is the radius of its circular orbit?
what is the radius of its circular orbit? perpendicular to Earth’s
perpendicular to Earth’s  ? (b) What is the direction of the force if the current is straight up and Earth’s field direction is due north, parallel to the ground?
? (b) What is the direction of the force if the current is straight up and Earth’s field direction is due north, parallel to the ground? at an angle of
at an angle of  to Earth’s
to Earth’s  field. What is the force on a
field. What is the force on a  section of this line? (b) Discuss practical concerns this presents, if any.
section of this line? (b) Discuss practical concerns this presents, if any. current passes between the poles of a strong magnet that is perpendicular to its field and experiences a
current passes between the poles of a strong magnet that is perpendicular to its field and experiences a  force on the
force on the  of their strength? (b) How many percent would the current need to be increased to return the torque to original values?
of their strength? (b) How many percent would the current need to be increased to return the torque to original values? on a side that carries a
on a side that carries a  current in a
current in a  field? (b) What is the torque when
field? (b) What is the torque when  ?
? The loop has
The loop has  square turns that are
square turns that are  on a side and is in a uniform
on a side and is in a uniform  magnetic field.
magnetic field. -turn square loop
-turn square loop  if the loop is carrying
if the loop is carrying 
 must equal units of
must equal units of  Verify this.
Verify this. of maximum? (c)
of maximum? (c)  of maximum?
of maximum? in radius with a current of
in radius with a current of  Find the maximum torque on a proton in a
Find the maximum torque on a proton in a  field. (This is a significant torque on a small particle.)
field. (This is a significant torque on a small particle.) is vertical, with its axis on an east-west line. A current of
is vertical, with its axis on an east-west line. A current of  What are the direction and magnitude of the torque on the loop? (b) Does this device have any practical applications as a motor?
What are the direction and magnitude of the torque on the loop? (b) Does this device have any practical applications as a motor? below the horizontal and with a strength of
below the horizontal and with a strength of 
 The Hall electric field is measured to be
The Hall electric field is measured to be  (a) What is the drift speed of the conduction electrons? (b) Assuming that
(a) What is the drift speed of the conduction electrons? (b) Assuming that  electrons per cubic meter and that the cross-sectional area of the strip is
electrons per cubic meter and that the cross-sectional area of the strip is  calculate the current in the strip. (c) What is the Hall coefficient
calculate the current in the strip. (c) What is the Hall coefficient  ?
? and it is placed in a magnetic field of magnitude
and it is placed in a magnetic field of magnitude  What are the value and polarity of the Hall potential in the copper strip?
What are the value and polarity of the Hall potential in the copper strip? and
and  respectively. (a) What speed must a proton have to pass through the selector? (b) Also calculate the speeds required for an alpha-particle and a singly ionized
respectively. (a) What speed must a proton have to pass through the selector? (b) Also calculate the speeds required for an alpha-particle and a singly ionized  atom to pass through the selector.
atom to pass through the selector. and
and  When the electric field is turned off, the charged particle travels in a circular path of radius
When the electric field is turned off, the charged particle travels in a circular path of radius  Determine the charge-to-mass ratio of the particle.
Determine the charge-to-mass ratio of the particle. for a current of
for a current of  when it is placed in a magnetic field of
when it is placed in a magnetic field of  What is the magnetic field in a region where the reading is
What is the magnetic field in a region where the reading is  for
for  of current?
of current? Determine (a) the rotational period of the circulating protons and (b) the maximum radius of the protons’ orbit.
Determine (a) the rotational period of the circulating protons and (b) the maximum radius of the protons’ orbit. and
and  and the strength of the magnetic field that separates the ions is
and the strength of the magnetic field that separates the ions is  A stream of singly charged
A stream of singly charged  ions is found to bend in a circular arc of radius
ions is found to bend in a circular arc of radius  What is the mass of the
What is the mass of the  and the maximum orbital radius of the circulating protons is
and the maximum orbital radius of the circulating protons is  (a) What is the kinetic energy of the protons when they are ejected from the cyclotron? (b) What is this energy in
(a) What is the kinetic energy of the protons when they are ejected from the cyclotron? (b) What is this energy in  taken from a sample of old glacial ice. (The relative abundance of these oxygen isotopes is related to climatic temperature at the time the ice was deposited.) The ratio of the masses of these two ions is
taken from a sample of old glacial ice. (The relative abundance of these oxygen isotopes is related to climatic temperature at the time the ice was deposited.) The ratio of the masses of these two ions is  and they are singly charged and travel at
and they are singly charged and travel at  and uranium-
and uranium- ions are being separated in a mass spectrometer. (The much rarer uranium-
ions are being separated in a mass spectrometer. (The much rarer uranium- and
and  respectively, and they travel at
respectively, and they travel at  in a
in a  field. What is the separation between their paths when they hit a target after traversing a semicircle? (b) Discuss whether this distance between their paths seems to be big enough to be practical in the separation of uranium-
field. What is the separation between their paths when they hit a target after traversing a semicircle? (b) Discuss whether this distance between their paths seems to be big enough to be practical in the separation of uranium-
 moving with a velocity of
moving with a velocity of  in a magnetic field of
in a magnetic field of 

 with a velocity of
with a velocity of  What is the magnetic force on the electron?
What is the magnetic force on the electron? and
and  respectively. If the droplet is given an initial horizontal velocity of
respectively. If the droplet is given an initial horizontal velocity of  what magnetic field will keep it moving in this direction? Why must gravity be considered here?
what magnetic field will keep it moving in this direction? Why must gravity be considered here?
 and
and 
 passes between parallel plates that are
passes between parallel plates that are  What is the strength of the uniform magnetic field
What is the strength of the uniform magnetic field  enters a region where
enters a region where  and
and  What is the initial force on it?
What is the initial force on it? enters a region where there is a uniform electric field and a uniform magnetic field. The magnetic field is given by
enters a region where there is a uniform electric field and a uniform magnetic field. The magnetic field is given by  If the electron travels through a region without being deflected, what is the electric field?
If the electron travels through a region without being deflected, what is the electric field? Earth’s magnetic field has a horizontal component of
Earth’s magnetic field has a horizontal component of  north and a vertical component of
north and a vertical component of  to a circular orbit of radius
to a circular orbit of radius  to complete eight revolutions in a uniform magnetic field of magnitude
to complete eight revolutions in a uniform magnetic field of magnitude 
 enters a uniform magnetic field that is horizontal and directed from east to west. (a) If the particle is deflected initially to the north in a circular arc, is its charge positive or negative? (b) If
enters a uniform magnetic field that is horizontal and directed from east to west. (a) If the particle is deflected initially to the north in a circular arc, is its charge positive or negative? (b) If  and the charge-to-mass ratio
and the charge-to-mass ratio  of the particle is
of the particle is  what is the radius of the path? (c) What is the speed of the particle after it has moved in the field for
what is the radius of the path? (c) What is the speed of the particle after it has moved in the field for  ? for
? for  ?
? and
and 
 completes
completes  Identify the ion.
Identify the ion. of the radii of their circular orbits?
of the radii of their circular orbits? and travels in a helical path with a radius of
and travels in a helical path with a radius of  (a) What is the value of
(a) What is the value of  after entering the field?
after entering the field? angle with the
angle with the  Calculate the (a) pitch and (b) radius of the trajectory.
Calculate the (a) pitch and (b) radius of the trajectory. -long section of cable carrying current to a car starter motor makes an angle of
-long section of cable carrying current to a car starter motor makes an angle of  field. What is the current when the wire experiences a force of
field. What is the current when the wire experiences a force of  ? (b) If you run the wire between the poles of a strong horseshoe magnet, subjecting
? (b) If you run the wire between the poles of a strong horseshoe magnet, subjecting  what force is exerted on this segment of wire?
what force is exerted on this segment of wire? current and the
current and the  ? (b) What is the force on the wire if it is rotated to make an angle of
? (b) What is the force on the wire if it is rotated to make an angle of  -long segment of wire lies along the
-long segment of wire lies along the  in the positive
in the positive  Find the magnetic force on this segment.
Find the magnetic force on this segment. section of a long, straight wire carries a current of
section of a long, straight wire carries a current of  Calculate the magnitude of the force on the section if the angle between the field and the direction of the current is (a)
Calculate the magnitude of the force on the section if the angle between the field and the direction of the current is (a)  (b)
(b)  (c)
(c)  or (d)
or (d)  passes through the field as shown in the accompanying figure. What is the magnetic force on the wire?
passes through the field as shown in the accompanying figure. What is the magnetic force on the wire? and
and  If the coil is placed in a uniform magnetic field of strength
If the coil is placed in a uniform magnetic field of strength  what is the maximum torque on it?
what is the maximum torque on it? The coil lies in a magnetic field of magnitude
The coil lies in a magnetic field of magnitude  of the maximum possible torque. What is the angle between the magnetic field and the normal to the plane of the coil?
of the maximum possible torque. What is the angle between the magnetic field and the normal to the plane of the coil? by
by  rectangular current loop carries a current of
rectangular current loop carries a current of  What is the magnetic dipole moment of the loop?
What is the magnetic dipole moment of the loop? (a) What current through the coil results in a magnetic dipole moment of
(a) What current through the coil results in a magnetic dipole moment of  ? (b) What is the maximum torque that the coil will experience in a uniform field of strength
? (b) What is the maximum torque that the coil will experience in a uniform field of strength  ? (c) If the angle between
? (c) If the angle between  what is the magnitude of the torque on the coil? (d) What is the magnetic potential energy of coil for this orientation?
what is the magnitude of the torque on the coil? (d) What is the magnetic potential energy of coil for this orientation? magnetic field such that
magnetic field such that  and it is placed in a uniform magnetic field of strength
and it is placed in a uniform magnetic field of strength  (a) What is the maximum torque that the loop will experience if it is square? (b) If it is circular? (c) At what angle relative to
(a) What is the maximum torque that the loop will experience if it is square? (b) If it is circular? (c) At what angle relative to  Show that the magnitudes of the magnetic dipole moment
Show that the magnitudes of the magnetic dipole moment ![\[\frac{\mu}{L}=\frac{e}{2m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-edf87790ecc475f6bb63925a8bd83c8f_l3.svg "Rendered by QuickLaTeX.com")
 electrons per cubic meter. What will be the Hall voltage reading from a probe made up of
electrons per cubic meter. What will be the Hall voltage reading from a probe made up of  copper plate when a current of
copper plate when a current of  is passed through it in a magnetic field of
is passed through it in a magnetic field of  perpendicular to the
perpendicular to the 
 for
for  current is observed in a
current is observed in a  magnetic field for a rectangular sample with length
magnetic field for a rectangular sample with length  width
width  and height
and height  Determine the density of the charge carriers.
Determine the density of the charge carriers. magnetic field. (a) What electric field strength is needed to select a speed of
magnetic field. (a) What electric field strength is needed to select a speed of  proton moving perpendicularly to the
proton moving perpendicularly to the  field of a cyclotron.
field of a cyclotron. -diameter pipe if the Hall voltage is
-diameter pipe if the Hall voltage is  (b) What would the Hall voltage be for the same flow rate through a
(b) What would the Hall voltage be for the same flow rate through a  -diameter pipe with the same field applied?
-diameter pipe with the same field applied? (that of a helium atom) moving at
(that of a helium atom) moving at  perpendicular to a
perpendicular to a  magnetic field travels in a circular path of radius
magnetic field travels in a circular path of radius  (a) What is the charge of the particle? (b) What is unreasonable about this result? (c) Which assumptions are responsible?
(a) What is the charge of the particle? (b) What is unreasonable about this result? (c) Which assumptions are responsible? -long wire perpendicular to Earth’s
-long wire perpendicular to Earth’s  field. (a) Find the speed with which the wire must move. (b) What is unreasonable about this result? (c) Which assumption is responsible?
field. (a) Find the speed with which the wire must move. (b) What is unreasonable about this result? (c) Which assumption is responsible? output for blood moving at
output for blood moving at  in a
in a  -diameter vessel. (a) What magnetic field strength is needed? (b) What is unreasonable about this result? (c) Which premise is responsible?
-diameter vessel. (a) What magnetic field strength is needed? (b) What is unreasonable about this result? (c) Which premise is responsible? pointed in the
pointed in the  -direction as it crosses the
-direction as it crosses the  at a particular time. There is a negative charge
at a particular time. There is a negative charge  pointed in the
pointed in the  -direction. It is found that the particle describes a circle of radius
-direction. It is found that the particle describes a circle of radius  Find
Find  enters a region of uniform magnetic field of
enters a region of uniform magnetic field of  at an angle of
at an angle of  to the magnetic field. In the region of magnetic field proton describes a helical path with radius
to the magnetic field. In the region of magnetic field proton describes a helical path with radius 
 entering a region of uniform magnetic field
entering a region of uniform magnetic field  over a
over a 
 and
and  where
where  a wire of length
a wire of length  Find the magnetic force on the wire at this instant in time.
Find the magnetic force on the wire at this instant in time. A uniform magnetic field of magnitude
A uniform magnetic field of magnitude  a chamber in which a gas discharge is taking place. The ion is accelerated by a potential difference
a chamber in which a gas discharge is taking place. The ion is accelerated by a potential difference  and allowed to enter a region of constant magnetic field
and allowed to enter a region of constant magnetic field  In the uniform magnetic field region, the ion moves in a semicircular path striking a photographic plate at a distance
In the uniform magnetic field region, the ion moves in a semicircular path striking a photographic plate at a distance 

 and
and 

 and the ring rotates about the
and the ring rotates about the  in the positive
in the positive  with
with  and
and 
 carries a current of
carries a current of  At a particular instant, the loop lies in the
At a particular instant, the loop lies in the  As viewed from above the
As viewed from above the 
 due to an element
due to an element 

 produces a magnetic field at point P given by the Biot-Savart law.
produces a magnetic field at point P given by the Biot-Savart law. is known as the
is known as the 
 . The magnitude of
. The magnitude of 
 , then
, then  \vec{\mathbf{0}}
\vec{\mathbf{0}}

 . Another way to think about it is that each of the radius values is nearly the same, no matter where the current element is on the line segment, if
. Another way to think about it is that each of the radius values is nearly the same, no matter where the current element is on the line segment, if  and
and ![\[\theta=\tan^{-1}\left(\frac{1~\mathrm{m}}{0.01~\mathrm{m}}=89.4^{\circ}.\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c2dbd9ba4167b8a6adeabc9d098910ef_l3.svg "Rendered by QuickLaTeX.com")


![\[B=\frac{\mu_0}{4\pi}\int_{\mathrm{wire}}\frac{Id\vec{\mathbf{l}}\times\hat{\mathbf{r}}}{r^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-93380b0bee5cc0004a48cb6eb7620ec4_l3.svg "Rendered by QuickLaTeX.com")
 :
:![\[B=\frac{\mu_0}{4\pi}\int_{\mathrm{wire}}\frac{Ird\theta}{r^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3f384a3127976d3cc3add8a731f7153a_l3.svg "Rendered by QuickLaTeX.com")
![\[B=\frac{\mu_0I}{4\pi r}\int_{\mathrm{wire}}d\theta.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-90f76ff05922d11016e59efada82510a_l3.svg "Rendered by QuickLaTeX.com")
![\[B=\frac{\mu_0I\theta}{4\pi r}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cb4632e378f8939a2cbe19fb0180a029_l3.svg "Rendered by QuickLaTeX.com")

 and
and  .
. located at the position
located at the position  points out of the page for any element along the wire. At point
points out of the page for any element along the wire. At point  , we have from the Biot-Savart law
, we have from the Biot-Savart law
 in terms of
in terms of ![\[r=\sqrt{x^2+R^2}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9d070377a57bc8256787cdf817ed6a1f_l3.svg "Rendered by QuickLaTeX.com")
![\[\sin\theta=\frac{R}{\sqrt{x^2+R^2}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-63c539c3b49166c81d44003f45abf31c_l3.svg "Rendered by QuickLaTeX.com")

![\begin{equation*}B=\frac{\mu_0I}{2\pi R}\left[\frac{x}{(x^2+R^2)^{1/2}}\right]_0^{\infty}.\end{equation*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cd8df5fbf8e0fbfa17418669324a5702_l3.svg "Rendered by QuickLaTeX.com")




![\[B_1=B_3=\frac{\mu_0I}{2\pi R}=\frac{(4\pi\times10^{-7}~\mathrm{T}\cdot\mathrm{m/A})(2~\mathrm{A})}{2\pi(0.01~\mathrm{m})}=4\times10^{-5}~\mathrm{T}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7fa361e942d60f5e3360eab0ede4a2b7_l3.svg "Rendered by QuickLaTeX.com")
![\[B_2=\frac{\mu_0I}{2\pi R}=\frac{(4\pi\times10^{-7}~\mathrm{T}\cdot\mathrm{m/A})(2~\mathrm{A})}{2\pi(0.01414~\mathrm{m})}=3\times10^{-5}~\mathrm{T}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bfe55c504aeff9862e58289b3a3ecb82_l3.svg "Rendered by QuickLaTeX.com")
![\[B_{\mathrm{net}~x}=-4\times10^{-5}~\mathrm{T}-(2.83\times10^{-5}~\mathrm{T})\cos(45^{\circ})=-6\times10^{-5}~\mathrm{T}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-47dc5e6ba94ab48a02bf6cee35fe9706_l3.svg "Rendered by QuickLaTeX.com")
![\[B_{\mathrm{net}~y}=-4\times10^{-5}~\mathrm{T}-(2.83\times10^{-5}~\mathrm{T})\sin(45^{\circ})=-6\times10^{-5}~\mathrm{T}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2f921858e706793efbef4db927b1d05a_l3.svg "Rendered by QuickLaTeX.com")



 with
with 
 .) Since the wires are very long, it is convenient to think in terms of
.) Since the wires are very long, it is convenient to think in terms of  , the force per unit length. Substituting the expression for
, the force per unit length. Substituting the expression for  into Equation
into Equation 

 by definition, and because
by definition, and because  , the force per meter is exactly
, the force per meter is exactly  . This is the basis of the definition of the ampere.
. This is the basis of the definition of the ampere. . For both the ampere and the coulomb, the method of measuring force between conductors is the most accurate in practice.
. For both the ampere and the coulomb, the method of measuring force between conductors is the most accurate in practice. . The first wire is located at
. The first wire is located at  while the other wire is located at
while the other wire is located at  as shown in
as shown in 
![\[r=\sqrt{(3.0~\mathrm{cm})^2+(4.0~\mathrm{cm})^2}=5.0~\mathrm{cm}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-96839640eb509bebaf695a8e1546fe65_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{F}{l}=\frac{\left(4\pi\times10^{-7}~\mathrm{T}\cdot\mathrm{m/A}\right)\left(5\times10^{-3}~\mathrm{A}\right)^2}{2\pi(5\times10^{-2}~\mathrm{m})}=1\times10^{-10}~\mathrm{N/m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7be2ac90f24fcfba799b9e52634636e7_l3.svg "Rendered by QuickLaTeX.com")
![\[\theta=\tan^{-1}\left(\frac{3~\mathrm{cm}}{4~\mathrm{cm}}\right)=36.9^{\circ}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a7e69d862976f03db21ee7eab865cefd_l3.svg "Rendered by QuickLaTeX.com")
![\[\cos(36.9^{\circ})\hat{\mathbf{i}}-\sin(36.9^{\circ})\hat{\mathbf{j}}=0.8\hat{\mathbf{i}}-0.6\hat{\mathbf{j}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-520cf16a5d1e4d57643ee52e6b78a0ae_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{\vec{\mathbf{F}}}{l}=(1\times10^{-10}~\mathrm{N/m})\times(0.8\hat{\mathbf{i}}-0.6\hat{\mathbf{j}})=(8\times10^{-11}\hat{\mathbf{i}}-6\times10^{-11}\hat{\mathbf{j}})~\mathrm{N/m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-10d40e40217a98fdbdf178d9d497d48c_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{\vec{\mathbf{F}}}{l}=(-8\times10^{-11}\hat{\mathbf{i}}+6\times10^{-11}\hat{\mathbf{j}})~\mathrm{N/m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e5009625ac5da5e4b0ca062a099274ba_l3.svg "Rendered by QuickLaTeX.com")
 , respectively. The first wire is located at
, respectively. The first wire is located at  while the other wire is located at
while the other wire is located at  . What is the magnitude of the magnetic force per unit length of the first wire on the second and the second wire on the first?
. What is the magnitude of the magnetic force per unit length of the first wire on the second and the second wire on the first?

 .
. due to the current element
due to the current element  , which is directly opposite
, which is directly opposite 
![\[\cos\theta=\frac{R}{\sqrt{y^2+R^2}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-49a6f21ab20805d81134cb5fbb47a1a2_l3.svg "Rendered by QuickLaTeX.com")

 . As discussed in the previous chapter, the closed current loop is a magnetic dipole of moment
. As discussed in the previous chapter, the closed current loop is a magnetic dipole of moment  . For this example,
. For this example,  and
and  , so the magnetic field at
, so the magnetic field at 
 in Equation
in Equation 
 for a flat coil of n loops per length. It can also be expressed as
for a flat coil of n loops per length. It can also be expressed as
 in Equation
in Equation 

 , but flow in opposite directions as seen in
, but flow in opposite directions as seen in  while the other loop has a radius of
while the other loop has a radius of  . The distance from the first loop to the point where the magnetic field is measured is
. The distance from the first loop to the point where the magnetic field is measured is  . What is the magnitude of the net magnetic field at point
. What is the magnitude of the net magnetic field at point 

 over the closed paths
over the closed paths  is the product of
is the product of  , and
, and![\[\vec{\mathbf{B}}\cdot d\vec{\mathbf{l}}=Brd\theta.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-255a93c54eb608fe523aeefe810ee3cd_l3.svg "Rendered by QuickLaTeX.com")

 equals
equals  and
and 
 and
and
 (see
(see 


 and solve for
and solve for 
 and
and  , are shown at arbitrary points on a circle of radius
, are shown at arbitrary points on a circle of radius  . Therefore, we can apply Ampère’s law to the circular path as shown.
. Therefore, we can apply Ampère’s law to the circular path as shown.![\[\oint\vec{\mathbf{B}}\cdot d\vec{\mathbf{l}}=B_{\theta}\oint dl=B_{\theta(2\pi r).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d29109e897856ee622a4cc55335f17a5_l3.svg "Rendered by QuickLaTeX.com")
![\[B_{\theta}(2\pi r)=\mu_0I.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f0170010a9359f6cdabfa67e3a9f3251_l3.svg "Rendered by QuickLaTeX.com")
![\[B=\frac{\mu_0I}{2\pi r}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-762d302c98721fdf6e3c1ffb77fdb9a2_l3.svg "Rendered by QuickLaTeX.com")
 that is distributed uniformly over its cross-section. Find the magnetic field both inside and outside the wire.
that is distributed uniformly over its cross-section. Find the magnetic field both inside and outside the wire.
![\[\oint\vec{\mathbf{B}}\cdot d\vec{\mathbf{l}}=\oint Bdl=B\oint dl=B(2\pi r).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-690a30253b792a04aec7b678dc609883_l3.svg "Rendered by QuickLaTeX.com")
 such as that shown in part (a) of
such as that shown in part (a) of  times the area enclosed. Since the current is uniform, the current density inside the path equals the current density in the whole wire, which is
times the area enclosed. Since the current is uniform, the current density inside the path equals the current density in the whole wire, which is  . Therefore the current
. Therefore the current ![\[I=\frac{\pi r^2}{\pi a^2}I_0=\frac{r^2}{a^2}I_0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-11e32ecb8e6fa9e54af77c91086ff5aa_l3.svg "Rendered by QuickLaTeX.com")
![\[B(2\pi r)=\mu_0\left(\frac{r^2}{a^2}\right)I_0,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-52c8e7c84133018a45bb672afc88d49d_l3.svg "Rendered by QuickLaTeX.com")
![\[B=\frac{\mu_0I_0}{2\pi}\frac{r}{a^2}~(r\leq a).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0080742212d225a2551c8df65d9e7c38_l3.svg "Rendered by QuickLaTeX.com")
![\[B=\frac{\mu_0I_0}{2\pi r}~(r\geq a).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1085f9d29aacbf00e4974cf09effdc59_l3.svg "Rendered by QuickLaTeX.com")


 where
where  by finding the net current through the loop. Positive currents flow with your right-hand thumb if your fingers wrap around in the direction of the loop. This will tell us the sign of the answer.
by finding the net current through the loop. Positive currents flow with your right-hand thumb if your fingers wrap around in the direction of the loop. This will tell us the sign of the answer. .
. .
. of current going downward and
of current going downward and  going upward. Therefore, the total current is
going upward. Therefore, the total current is  and
and  .
. ; therefore, the number of turns in an infinitesimal length
; therefore, the number of turns in an infinitesimal length  are
are  turns. This produces a current
turns. This produces a current
 is the current through each slice. The magnetic field
is the current through each slice. The magnetic field 


![\begin{eqnarray*}\cos\theta d\theta&=&\left[-\frac{y^2}{(y^2+R^2)^{3/2}}+\frac{1}{\sqrt{y^2+R^2}}\right]dy\\&=&\frac{R^2dy}{(y^2+R^2)^{3/2}}.\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4fbe3d0a263eac5880524c4e54b1f454_l3.svg "Rendered by QuickLaTeX.com")

 . From a practical point of view, the infinite solenoid is one whose length is much larger than its radius
. From a practical point of view, the infinite solenoid is one whose length is much larger than its radius  . In this case,
. In this case,  and
and  . Then from Equation
. Then from Equation ![\[\vec{\mathbf{B}}=\frac{\mu_0IN}{2L}\hat{\mathbf{j}}[\sin(\pi/2)-\sin(-\pi/2)]=\frac{\mu_0IN}{L}\hat{\mathbf{j}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-34c6628910f7faa1c5f3ec5e83aca510_l3.svg "Rendered by QuickLaTeX.com")



 . Therefore, from Ampère’s law,
. Therefore, from Ampère’s law,![\[Bl=\mu_0nlI\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f8eb048ef2cad2ff5cb9e094781fb6a3_l3.svg "Rendered by QuickLaTeX.com")


 turns wound around a cylinder of diameter
turns wound around a cylinder of diameter  and length
and length  . If the current through the coils is
. If the current through the coils is  , what is the magnitude of the magnetic field inside and near the middle of the solenoid?
, what is the magnitude of the magnetic field inside and near the middle of the solenoid?![\[n=\frac{300~\mathrm{turns}}{0.140~\mathrm{m}}=2.14\times10^3~\mathrm{turns/m}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fd7837075862ee45c1cdaf86b83c0dbb_l3.svg "Rendered by QuickLaTeX.com")

 ? (b)
? (b)  ? The solenoid has
? The solenoid has  flowing through the coils
flowing through the coils
 . Actually, this assumption is not precisely correct, for as part (b) of
. Actually, this assumption is not precisely correct, for as part (b) of  ,
,  , and
, and  shown in part (d) of
shown in part (d) of 
![\[\oint B(2\pi r)=0\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a4c0f5469f094c7793473fca51c30581_l3.svg "Rendered by QuickLaTeX.com")

 through the surface. We now find with Ampère’s law,
through the surface. We now find with Ampère’s law,![\[B(2\pi r)=\mu_0NI\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4c7e1d0c97a17d727e7cf6b5aefe10cd_l3.svg "Rendered by QuickLaTeX.com")

 .
.
 )
)

 atoms and ions, each with its magnetic dipole moment. If no external magnetic field is present, the magnetic dipoles are randomly oriented—as many are pointed up as down, as many are pointed east as west, and so on. Consequently, the net magnetic dipole moment of the sample is zero. However, if the sample is placed in a magnetic field, these dipoles tend to align with the field (see
atoms and ions, each with its magnetic dipole moment. If no external magnetic field is present, the magnetic dipoles are randomly oriented—as many are pointed up as down, as many are pointed east as west, and so on. Consequently, the net magnetic dipole moment of the sample is zero. However, if the sample is placed in a magnetic field, these dipoles tend to align with the field (see  . If
. If  (the value of atomic hydrogen) and
(the value of atomic hydrogen) and  , then
, then![\[U_B=1.9\times10^{-23}~\mathrm{J}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-698e9dcd4905a24228af15e0edd07a62_l3.svg "Rendered by QuickLaTeX.com")
 ,
,![\[U_T\approx kT=(1.38\times10^{-23}~\mathrm{J/K})(300~\mathrm{K})=4.1\times10^{-21}~\mathrm{J},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-321c4717d503e6f680051f1bdcf6ac4d_l3.svg "Rendered by QuickLaTeX.com")
 times greater than
times greater than 


 is the field due to the surface current
is the field due to the surface current 
 is a dimensionless quantity called the
is a dimensionless quantity called the 

 . However, since
. However, since 










 )
)

 )
)





 to
to  , and they contain about
, and they contain about  to
to  atoms. Within a domain, the magnetic dipoles are rigidly aligned in the same direction by coupling among the atoms. This coupling, which is due to quantum mechanical effects, is so strong that even thermal agitation at room temperature cannot break it. The result is that each domain has a net dipole moment. Some materials have weaker coupling and are ferromagnetic only at lower temperatures.
atoms. Within a domain, the magnetic dipoles are rigidly aligned in the same direction by coupling among the atoms. This coupling, which is due to quantum mechanical effects, is so strong that even thermal agitation at room temperature cannot break it. The result is that each domain has a net dipole moment. Some materials have weaker coupling and are ferromagnetic only at lower temperatures.
 to
to  , and it also depends on the history of the magnetic field to which the material has been subject. A typical plot of
, and it also depends on the history of the magnetic field to which the material has been subject. A typical plot of  ,
,  , and
, and  ; (2) for
; (2) for  ,
,  , and
, and  .
.
 (i.e., when the current in the solenoid is turned off). The iron stays magnetized, which means that it has become a permanent magnet.
(i.e., when the current in the solenoid is turned off). The iron stays magnetized, which means that it has become a permanent magnet.


 turns per centimetre, what is the applied field
turns per centimetre, what is the applied field  ? (b) What is the net magnetic field for this same current? (c) What is the magnetic susceptibility in this case?
? (b) What is the net magnetic field for this same current? (c) What is the magnetic susceptibility in this case?
 . Notice that the internal field of the aligned atoms is much larger than the externally applied field.
. Notice that the internal field of the aligned atoms is much larger than the externally applied field.![\[\chi=\frac{B}{B_0}-1=\frac{1.4~\mathrm{T}}{5.0\times10^{-4}~\mathrm{T}}-1=2.8\times10^3.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8887f48a392350fd4a88ec82e39deb17_l3.svg "Rendered by QuickLaTeX.com")
 .
. measure of the ability of a material, in this case free space, to support a magnetic field
measure of the ability of a material, in this case free space, to support a magnetic field




 (at Center of loop)
(at Center of loop)




 produces a magnetic field a distance
produces a magnetic field a distance  is the permeability of free space.
is the permeability of free space.
![\[B=\mu_0nI\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3c099d16e33bd664ab77eb91c279a8d4_l3.svg "Rendered by QuickLaTeX.com")
![\[B=\frac{\mu_0NI}{2\pi r}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fa334311233b7d0a929661a29fff96ec_l3.svg "Rendered by QuickLaTeX.com")





 b.
b. 
 b.
b.  c.
c. 
 inside a long, hollow copper pipe that is carrying an electric current parallel to the axis. Is
inside a long, hollow copper pipe that is carrying an electric current parallel to the axis. Is  current flows through the wire shown. What is the magnitude of the magnetic field due to a
current flows through the wire shown. What is the magnitude of the magnetic field due to a  segment of wire as measured at (a) point A and (b) point B?
segment of wire as measured at (a) point A and (b) point B? segment that connects the longer wires as shown. Calculate the magnitude of the magnetic field at the center of the loop.
segment that connects the longer wires as shown. Calculate the magnitude of the magnetic field at the center of the loop. are positioned as shown in the accompanying figure. If both wires carry a current
are positioned as shown in the accompanying figure. If both wires carry a current  Estimate the magnetic field
Estimate the magnetic field  What is the current through the long wire?
What is the current through the long wire? above the ground carries a current of
above the ground carries a current of  What is the magnetic field on the ground directly below the wire? Compare your answer with the magnetic field of Earth.
What is the magnetic field on the ground directly below the wire? Compare your answer with the magnetic field of Earth. If the wire is placed in a uniform magnetic field of magnitude
If the wire is placed in a uniform magnetic field of magnitude  that is directed vertically downward, what is the resultant magnitude of the magnetic field
that is directed vertically downward, what is the resultant magnitude of the magnetic field  and
and  what is the magnetic field at point P?
what is the magnetic field at point P? in the same direction, what is the magnetic force per meter exerted on each wire? (b) Does the force pull the wires together or push them apart? (c) What happens if the currents flow in opposite directions?
in the same direction, what is the magnetic force per meter exerted on each wire? (b) Does the force pull the wires together or push them apart? (c) What happens if the currents flow in opposite directions? the other a current of
the other a current of  as shown in the accompanying figure. Each wire has a mass per unit length of
as shown in the accompanying figure. Each wire has a mass per unit length of  and they carry the same current in opposite directions. What is the current if the cords hang at
and they carry the same current in opposite directions. What is the current if the cords hang at  with respect to the vertical?
with respect to the vertical? The rectangular loop, whose long sides are parallel to the wire, carries a current
The rectangular loop, whose long sides are parallel to the wire, carries a current  What are the magnitude and direction of the force on the rectangular loop due to the magnetic field of the wire?
What are the magnitude and direction of the force on the rectangular loop due to the magnetic field of the wire? the magnetic field at its center is
the magnetic field at its center is  What is the radius of the loop?
What is the radius of the loop? ?
? At what distance along the axis of the loop is the magnetic field one-half its value at the center of the loop?
At what distance along the axis of the loop is the magnetic field one-half its value at the center of the loop? for the paths
for the paths  and
and 
 Evaluate
Evaluate  carries a current of
carries a current of  What is the magnetic field just outside the wire?
What is the magnetic field just outside the wire? and outer radius
and outer radius  A
A  current distributed uniformly over the cross-section flows into the page. Calculate the magnetic field at
current distributed uniformly over the cross-section flows into the page. Calculate the magnetic field at 

 (b)
(b)  (c)
(c)  and (d)
and (d)  Assume that the current is distributed uniformly over the cross sections of the two parts of the cable.
Assume that the current is distributed uniformly over the cross sections of the two parts of the cable. what is the magnetic field within the solenoid?
what is the magnetic field within the solenoid? within the solenoid?
within the solenoid? within it?
within it? long, has a diameter of
long, has a diameter of  and is wound with
and is wound with  turns. If the current through the windings is
turns. If the current through the windings is  what is the magnetic field at a point on the axis of the solenoid that is (a) at the center of the solenoid, (b)
what is the magnetic field at a point on the axis of the solenoid that is (a) at the center of the solenoid, (b) 
 is wrapped with
is wrapped with  turns per centimeter carries a current
turns per centimeter carries a current  what is
what is  and
and  and
and  ?
? has an inner radius of
has an inner radius of  It is wound with
It is wound with  By how much will this magnetic field decrease if the air is pumped out of the core while the current is held constant?
By how much will this magnetic field decrease if the air is pumped out of the core while the current is held constant? turns per metre, and
turns per metre, and  If
If  what is
what is  (a) Calculate the maximum magnetic dipole moment of a domain consisting of
(a) Calculate the maximum magnetic dipole moment of a domain consisting of  iron atoms. (b) What current would have to flow through a single circular loop of wire of diameter
iron atoms. (b) What current would have to flow through a single circular loop of wire of diameter  The toroid has a mean radius of
The toroid has a mean radius of  what is the magnetic field within it?
what is the magnetic field within it? the magnetic field inside it is
the magnetic field inside it is  For this current, what is the permeability of the iron? If the current is turned off and then restored to
For this current, what is the permeability of the iron? If the current is turned off and then restored to  are positioned as shown in the accompanying figure. What is the magnitude of the magnetic field at the point
are positioned as shown in the accompanying figure. What is the magnitude of the magnetic field at the point  What is the magnetic field at the point P that is a distance
What is the magnetic field at the point P that is a distance  ? Describe qualitatively the subsequent motion of the electron.
? Describe qualitatively the subsequent motion of the electron. on either side of the sheet. What is the direction of
on either side of the sheet. What is the direction of  is tightly wound with one layer of wire that has a diameter of
is tightly wound with one layer of wire that has a diameter of  (a) How many turns are there on the toroid? (b) If the current through the toroid windings is
(a) How many turns are there on the toroid? (b) If the current through the toroid windings is 
 where
where  are the cross-sectional area and volume of the element, respectively. Use this, the Biot-Savart law, and
are the cross-sectional area and volume of the element, respectively. Use this, the Biot-Savart law, and  to show that the magnetic field of a moving point charge
to show that the magnetic field of a moving point charge ![\[\vec{\mathbf{B}}=\frac{\mu_0}{4\pi}\frac{q\vec{\mathbf{v}}\times\hat{\mathbf{r}}}{r^2}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2d972a9cf73a02678c6fd0c15d026ce2_l3.svg "Rendered by QuickLaTeX.com")
 and
and  are both zero at
are both zero at  (These vanishing derivatives demonstrate that the magnetic field varies only slightly near
(These vanishing derivatives demonstrate that the magnetic field varies only slightly near  is distributed uniformly around a thin ring of insulating material. The ring has a radius of
is distributed uniformly around a thin ring of insulating material. The ring has a radius of  and rotates at
and rotates at  around the axis that passes through its center and is perpendicular to the plane of the ring. What is the magnetic field at the center of the ring?
around the axis that passes through its center and is perpendicular to the plane of the ring. What is the magnetic field at the center of the ring? If the disk rotates at a constant angular velocity
If the disk rotates at a constant angular velocity  what is the magnetic field at its center?
what is the magnetic field at its center? of the circular current loop shown below. (a) Evaluate
of the circular current loop shown below. (a) Evaluate  Also show that
Also show that  (b) Can you deduce this limit without evaluating the integral? (Hint: See the accompanying figure.)
(b) Can you deduce this limit without evaluating the integral? (Hint: See the accompanying figure.) where
where  where
where  is a constant and
is a constant and  in the cavity by superimposing the field of a solid cylindrical conductor with radius
in the cavity by superimposing the field of a solid cylindrical conductor with radius  onto the field of a solid cylindrical conductor with radius
onto the field of a solid cylindrical conductor with radius  Then use the fact that the appropriate azimuthal unit vectors can be expressed as
Then use the fact that the appropriate azimuthal unit vectors can be expressed as  and
and  to show that everywhere inside the cavity the magnetic field is given by the constant
to show that everywhere inside the cavity the magnetic field is given by the constant  where
where  and
and  is the position of
is the position of  is the position of
is the position of  for each side of the loop then find the entire
for each side of the loop then find the entire  Can you think of an Ampère loop that would make the problem easier? Do those results match these?
Can you think of an Ampère loop that would make the problem easier? Do those results match these? where
where 
 are connected to a battery of voltage
are connected to a battery of voltage  The tubes are then disconnected from the battery and rotated in the same direction at angular speed of
The tubes are then disconnected from the battery and rotated in the same direction at angular speed of  and (b) at a point between the tubes
and (b) at a point between the tubes  and (c) at a point outside the tubes
and (c) at a point outside the tubes  (Hint: Think of copper tubes as a capacitor and find the charge density based on the voltage applied,
(Hint: Think of copper tubes as a capacitor and find the charge density based on the voltage applied, 

![\vec{\mathbf{B}}=C\left[\left(x/y^2\right)\hat{\mathbf{i}}+\left(1/y\right)\hat{\mathbf{j}}\right]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6fc69d910f26331bc999c44a15c5ca93_l3.svg "Rendered by QuickLaTeX.com") in the rectangular region of the
in the rectangular region of the  (a) Find the magnetic field produced at a point on the axis a distance
(a) Find the magnetic field produced at a point on the axis a distance 

 and
and  and compare it with the magnitude of magnetic field of Earth, which is about
and compare it with the magnitude of magnetic field of Earth, which is about 



 per unit time. Any change in the magnetic field or change in orientation of the area of the coil with respect to the magnetic field induces a voltage (emf).
per unit time. Any change in the magnetic field or change in orientation of the area of the coil with respect to the magnetic field induces a voltage (emf).


 of part (b) of the figure.
of part (b) of the figure.
 ),
),![\[1~\mathrm{Wb}=1~\mathrm{T}\cdot\mathrm{m}^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-46afa62c5cf4196835633c269cf9d510_l3.svg "Rendered by QuickLaTeX.com")
 ) instead of teslas, based on this definition. In many practical applications, the circuit of interest consists of a number
) instead of teslas, based on this definition. In many practical applications, the circuit of interest consists of a number 
 long and is tightly wound with
long and is tightly wound with  turns of wire. The resistance of the coil is
turns of wire. The resistance of the coil is  . The coil is placed in a spatially uniform magnetic field that is directed perpendicular to the face of the coil and whose magnitude is decreasing at a rate
. The coil is placed in a spatially uniform magnetic field that is directed perpendicular to the face of the coil and whose magnitude is decreasing at a rate  . (a) What is the magnitude of the emf induced in the coil? (b) What is the magnitude of the current circulating through the coil?
. (a) What is the magnitude of the emf induced in the coil? (b) What is the magnitude of the current circulating through the coil?
![\[\Phi_{\mathrm{m}}=BA=Bl^2,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2601b3658ef51c45922c720087c90e3b_l3.svg "Rendered by QuickLaTeX.com")

![\[I=\frac{\mathcal{E}}{R}=\frac{0.50~\mathrm{V}}{5.0~\Omega}=0.10~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-97a97d7b2cbef07487bd9db544c71c37_l3.svg "Rendered by QuickLaTeX.com")
 , and a total resistance of
, and a total resistance of  . At what rate must a magnetic field perpendicular to the face of the coil change in order to produce Joule heating in the coil at a rate of
. At what rate must a magnetic field perpendicular to the face of the coil change in order to produce Joule heating in the coil at a rate of  ?
? . The magnitude of
. The magnitude of  . Finally, you can apply Lenz’s law to determine the sense of
. Finally, you can apply Lenz’s law to determine the sense of 

 (
( , where
, where  ,
,  , and
, and  . (b) Determine the current in the coil at these three times if its resistance is
. (b) Determine the current in the coil at these three times if its resistance is  .
.

![\[\mathcal{E}=\left|\frac{d\Phi_{\mathrm{m}}}{dt}\right|=\left|\frac{d}{dt}\left(1.2e^{-(5.0~\mathrm{s}^{-1})t}~\mathrm{Wb}\right)\right|=6.0e^{-(5.0~\mathrm{s}^{-1})t}~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3da2bf615cfb184f17d6dd7500ac4142_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{E}(t_1)=6.0~\mathrm{V};~~\mathcal{E}(t_2)=4.7~\mathrm{V};~~\mathcal{E}(t_3)=0.040~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9dfc09701c628fb8f143b075f8666eae_l3.svg "Rendered by QuickLaTeX.com")
![\[I(t_1)=\frac{\mathcal{E}(t_1)}{R}=\frac{6.0~\mathrm{V}}{10~\Omega}=0.60~\mathrm{A};\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6daf58b330a3ab422b9ad9bd98316a35_l3.svg "Rendered by QuickLaTeX.com")
![\[I(t_2)=\frac{\mathcal{E}(t_2)}{R}=\frac{4.7~\mathrm{V}}{10~\Omega}=0.47~\mathrm{A};\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-84950018f5205f313c6160fc60d7336d_l3.svg "Rendered by QuickLaTeX.com")
![\[I(t_1)=\frac{\mathcal{E}(t_3)}{R}=\frac{0.040~\mathrm{V}}{10~\Omega}=4.0\times10^{-3}~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-763d6994a01843ba413fc88af4c63240_l3.svg "Rendered by QuickLaTeX.com")
 turns per meter is changing at a rate
turns per meter is changing at a rate  (See
(See  long and has a cross-sectional diameter of
long and has a cross-sectional diameter of  closely wound turns wrapped in a circle of diameter
closely wound turns wrapped in a circle of diameter  . This field is producing a maximum magnetic flux through the coil as it is directed along the length of the solenoid. Therefore, the magnetic flux through the coil is the product of the solenoid’s magnetic field times the area of the coil. Faraday’s law involves a time derivative of the magnetic flux. The only quantity varying in time is the current, the rest can be pulled out of the time derivative. Lastly, we include the number of turns in the coil to determine the induced emf in the coil.
. This field is producing a maximum magnetic flux through the coil as it is directed along the length of the solenoid. Therefore, the magnetic flux through the coil is the product of the solenoid’s magnetic field times the area of the coil. Faraday’s law involves a time derivative of the magnetic flux. The only quantity varying in time is the current, the rest can be pulled out of the time derivative. Lastly, we include the number of turns in the coil to determine the induced emf in the coil.![\[\Phi_{\mathrm{m}}=\mu_0nI\left(\frac{\pi d^2}{4}\right),\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3a110c904a2e10959713b2f1b3c82cf0_l3.svg "Rendered by QuickLaTeX.com")



 ‘ of
‘ of  and is perpendicular to the magnetic field, so we can simplify the integration of
and is perpendicular to the magnetic field, so we can simplify the integration of 
 we can now restate Faraday’s law,
we can now restate Faraday’s law, 
![\[I=\frac{Blv}{R}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1628f097383e9693fc310b8cfa2cb971_l3.svg "Rendered by QuickLaTeX.com")
 holds for any change in flux caused by the motion of a conductor. We saw in
holds for any change in flux caused by the motion of a conductor. We saw in 
 produces power
produces power  , and the resistor dissipates power
, and the resistor dissipates power  must balance the magnetic force
must balance the magnetic force  on the rod when it is carrying the induced current
on the rod when it is carrying the induced current 


 . Differentiating this equation, we obtain
. Differentiating this equation, we obtain

 perpendicular to the Earth’s field gives
perpendicular to the Earth’s field gives![\[\mathrm{emf}=B\ell v=(5.0\times10^{-5}~\mathrm{T})(1.0~\mathrm{m})(3.0~\mathrm{m/s})=150~\mu\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-41f64e02d1aac58a8ac1a15334c7f422_l3.svg "Rendered by QuickLaTeX.com")
 length of wire, as shown in
length of wire, as shown in  emf by moving at orbital speed through Earth’s field. This emf could be used to convert some of the shuttle’s kinetic and potential energy into electrical energy if a complete circuit could be made. To complete the circuit, the stationary ionosphere was to supply a return path through which current could flow. (The ionosphere is the rarefied and partially ionized atmosphere at orbital altitudes. It conducts because of the ionization. The ionosphere serves the same function as the stationary rails and connecting resistor in
emf by moving at orbital speed through Earth’s field. This emf could be used to convert some of the shuttle’s kinetic and potential energy into electrical energy if a complete circuit could be made. To complete the circuit, the stationary ionosphere was to supply a return path through which current could flow. (The ionosphere is the rarefied and partially ionized atmosphere at orbital altitudes. It conducts because of the ionization. The ionosphere serves the same function as the stationary rails and connecting resistor in  does the work that reduces the shuttle’s kinetic and potential energy, and allows it to be converted into electrical energy. Both tests were unsuccessful. In the first, the cable hung up and could only be extended a couple of hundred meters; in the second, the cable broke when almost fully extended. Example 10.3.1 indicates feasibility in principle.
does the work that reduces the shuttle’s kinetic and potential energy, and allows it to be converted into electrical energy. Both tests were unsuccessful. In the first, the cable hung up and could only be extended a couple of hundred meters; in the second, the cable broke when almost fully extended. Example 10.3.1 indicates feasibility in principle.
 conductor moving at an orbital speed of
conductor moving at an orbital speed of  perpendicular to Earth’s
perpendicular to Earth’s  .
.
 value is the maximum emf obtained when
value is the maximum emf obtained when  and so
and so  that is rotating in a horizontal plane around point
that is rotating in a horizontal plane around point  of radius
of radius  ? Assume that the resistor
? Assume that the resistor 
 . When finding the emf through Faraday’s law, all variables are constant in time but
. When finding the emf through Faraday’s law, all variables are constant in time but  . To calculate the work per unit time, we know this is related to the torque times the angular velocity. The torque is calculated by knowing the force on a rod and integrating it over the length of the rod.
. To calculate the work per unit time, we know this is related to the torque times the angular velocity. The torque is calculated by knowing the force on a rod and integrating it over the length of the rod. . Hence, the magnetic flux through the loop is
. Hence, the magnetic flux through the loop is![\[\Phi_{\mathrm{m}}=BA=B\frac{r^2\theta}{2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0721ffdf59ea831dce6495ff20d24d9a_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{E}=\left|\frac{d\Phi_{\mathrm{m}}}{dt}\right|=\frac{Br^2\omega}{2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-543df5e158fc6781784176a4f4901b28_l3.svg "Rendered by QuickLaTeX.com")
![\[I=\frac{\mathcal{E}}{R}=\frac{Br^2\omega}{2R}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7be7bf729c389d8b0057d85690415659_l3.svg "Rendered by QuickLaTeX.com")
 , so the magnetic torque on this segment is
, so the magnetic torque on this segment is![\[d\tau_{\mathrm{m}}=x\cdot dF_{\mathrm{m}}=IBxdx.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-83071c3467bef42cb47957fdffb58250_l3.svg "Rendered by QuickLaTeX.com")
![\[\tau_{\mathrm{m}}=\int_0^rd\tau_{\mathrm{m}}=IB\int_0^rxdx=\frac{1}{2}IBr^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ccf2e6bfd284ef0a3be0d4725b7ef48a_l3.svg "Rendered by QuickLaTeX.com")
 , and the work that you do when the rod rotates through an angle
, and the work that you do when the rod rotates through an angle  . Hence, the work per unit time that you do on the rod is
. Hence, the work per unit time that you do on the rod is![\[\frac{dW}{dt}=\tau\frac{d\theta}{dt}=\frac{1}{2}IBr^2\frac{d\theta}{dt}=\frac{1}{2}\left(\frac{Br^2\omega}{2R}\right)Br^2\omega=\frac{B^2r^4\omega^2}{4R},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-665f2543780b651e959ff4b8515f94d3_l3.svg "Rendered by QuickLaTeX.com")
![\[P=\left(\frac{Br^2\omega}{2R}\right)^2R=\frac{B^2r^4\omega^2}{4R}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d95a043f8849ade3c06b2fcb4202e41e_l3.svg "Rendered by QuickLaTeX.com")
![\[P=\frac{dW}{dt}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-01840ec556ca32137e9a840ce2c14357_l3.svg "Rendered by QuickLaTeX.com")
![\[|\mathcal{E}|=\int Bvdl.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-734d52d45e4157d427db081f65b60a51_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{E}=B\int vdr=B\omega\int_0^lrdr=\frac{1}{2}B\omega l^2,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bb2678987336e326037d0613f7058af1_l3.svg "Rendered by QuickLaTeX.com")
 . as shown in
. as shown in 
 is
is  simplifies to only the
simplifies to only the ![\[\Phi_{\mathrm{m}}=\int_{S}\vec{\mathbf{B}}\cdot\hat{\mathbf{n}}dA=BA\cos\theta.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d7a14ea0c0ed51685b9b54de3f584040_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{E}=-N\frac{d\Phi_{\mathrm{m}}}{dt}=NBA\sin\theta\frac{d\theta}{dt}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fec011ba8b69f1f61463ea5e7fa0839d_l3.svg "Rendered by QuickLaTeX.com")
 . The angle
. The angle  . This is changes the function to time space rather than
. This is changes the function to time space rather than ![\[\mathcal{E}=\mathcal{E}_0\sin\omega t,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9af5461d98631d6f780625f1d85b9d56_l3.svg "Rendered by QuickLaTeX.com")
 .
. . Assuming that the rod is in a uniform magnetic field
. Assuming that the rod is in a uniform magnetic field  perpendicularly through a
perpendicularly through a  magnetic field. What is the potential difference between the ends of the rod?
magnetic field. What is the potential difference between the ends of the rod?
 represents the line integral around the circuit. Faraday’s law can be written in terms of the
represents the line integral around the circuit. Faraday’s law can be written in terms of the 


![\[\oint\vec{\mathbf{E}}\cdot d\vec{\mathbf{l}}=\oint Edl=2\pi rE.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a04c08ef8adbae8b539daac8f340836e_l3.svg "Rendered by QuickLaTeX.com")
![\[E=\frac{\mathcal{E}}{2\pi r}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bb3b496636dd7b5e89a2e0b371ca8bd5_l3.svg "Rendered by QuickLaTeX.com")

 in free space where there isn’t a conducting path? The answer is that this case can be treated as if a conducting path were present; that is, nonconservative electric fields are induced wherever
in free space where there isn’t a conducting path? The answer is that this case can be treated as if a conducting path were present; that is, nonconservative electric fields are induced wherever  at
at  at
at  , etc. The existence of induced electric fields is certainly not restricted to wires in circuits.
, etc. The existence of induced electric fields is certainly not restricted to wires in circuits. . What is the magnitude of the induced electric field at a point a distance
. What is the magnitude of the induced electric field at a point a distance 
![\[B=\mu_0nI=\mu_0nI_0e^{-\alpha t}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-90bf8b35e19f84a2c9ae216f43c17f28_l3.svg "Rendered by QuickLaTeX.com")
![\[\Phi_{\mathrm{m}}=BA=\mu_0nI_0\pi R^2e^{-\alpha t}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-46315c18a11683cf078bb5082e41f5ba_l3.svg "Rendered by QuickLaTeX.com")


![\[E(2\pi r)=\left|\frac{d}{dt}(\mu_0nI_0\pi r^2e^{-\alpha t})\right|=\alpha\mu_0nI_0\pir^2e^{-\alpha t},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e88973c29d0cb76681506cb430158fc0_l3.svg "Rendered by QuickLaTeX.com")
![\[E=\frac{\alpha\mu_0nI_0\pi r}{2}e^{-\alpha t}~~~(r<R).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-187719a1c735d6763a1da12d4b0529d5_l3.svg "Rendered by QuickLaTeX.com")
 increases with
increases with 
 ,
,  ,
,  , and
, and  ?
? .
. is wound with
is wound with  ? (b) What is the electric field induced in the coil?
? (b) What is the electric field induced in the coil?





 to
to  , but another form of braking is needed to completely stop the vehicle. Generally, powerful rare-earth magnets such as neodymium magnets are used in roller coasters.
, but another form of braking is needed to completely stop the vehicle. Generally, powerful rare-earth magnets such as neodymium magnets are used in roller coasters. 
 to
to  . The
. The  radius and is in a uniform
radius and is in a uniform  magnetic field. What is the emf induced?
magnetic field. What is the emf induced?
![\[\mathcal{E}=-N\frac{d\Phi_{\mathrm{m}}}{dt}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c559d2559c152c167b9084340d206a0d_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{E}=NBA\sin\theta\frac{d\theta}{dt}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a75d8ed90cf9956e8a34fce41a859d8f_l3.svg "Rendered by QuickLaTeX.com")
 ,
,  ,
,  , and
, and  . The area of the loop is
. The area of the loop is![\[A=\pi r^2=\pi(0.0500~\mathrm{m})^2=7.85\times10^{-3}~\mathrm{m}^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9f54e25cacdb965203f9ee97efe9f1b1_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{E}=(200)(0.80~\mathrm{T})(7.85\times10^{-3}~\mathrm{m}^2)\sin(90^{\circ})\frac{\pi/2}{15.0\times10^{-3}~\mathrm{s}}=131~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ab5a65856adaa6302493ee1b40aa6e9f_l3.svg "Rendered by QuickLaTeX.com")

 , where the velocity
, where the velocity  (see
(see  , and they are in the same direction. The total emf around the loop is then
, and they are in the same direction. The total emf around the loop is then
 , so that
, so that
 . Here,
. Here,  , so that
, so that  , and
, and
 , and allowing for
, and allowing for 


 . Note that the frequency of the oscillation is
. Note that the frequency of the oscillation is  and the period is
and the period is  .
. 



 and are driven by an emf of
and are driven by an emf of  . Shortly after being turned on, they draw a current
. Shortly after being turned on, they draw a current![\[I=V/R=(48.0~\mathrm{V})/(0.400~\Omega)=120~\mathrm{A}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a2e48319e4ade331e6cc115c4812cd75_l3.svg "Rendered by QuickLaTeX.com")
 of energy as heat transfer. Under normal operating conditions for this motor, suppose the back emf is
of energy as heat transfer. Under normal operating conditions for this motor, suppose the back emf is  (
(![\[I=V/R=(8.0~\mathrm{V})/(0.400~\Omega)=20~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-94085f7935f5fb44fd62ceb5ad275941_l3.svg "Rendered by QuickLaTeX.com")
 . This does not cause a problem for this motor, whereas the former
. This does not cause a problem for this motor, whereas the former  would burn out the coils if sustained.
would burn out the coils if sustained. of a series-wound dc motor is
of a series-wound dc motor is  (
( ), the motor draws
), the motor draws  ? (b) What is the mechanical power output of the motor? (c) How much power is dissipated in the resistance of the coils? (d) What is the power output of the
? (b) What is the mechanical power output of the motor? (c) How much power is dissipated in the resistance of the coils? (d) What is the power output of the  . Answer parts (a) through (d) for this situation.
. Answer parts (a) through (d) for this situation.
![\[\mathcal{E}_i=\mathcal{E}_s-I(R_f+R_a)=120~\mathrm{V}-(10~\mathrm{A})(2.0~\Omega)=100~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2f00d61e2e95cfda0b229a4a8f1859d2_l3.svg "Rendered by QuickLaTeX.com")
![\[P_\mathrm{m}=\mathcal{E}_iI=(100~\mathrm{V})(10~\mathrm{A})=1.0\times10^3~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-39ebe840fad719b17a0286b586383b41_l3.svg "Rendered by QuickLaTeX.com")
![\[P_R=I^2R=(10~\mathrm{A})^2(2.0~\Omega)=2.0\times10^2~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d884b36ac23975ebacdd5da6f619b673_l3.svg "Rendered by QuickLaTeX.com")
![\[P_s=\mathcal{E}_sI=(120~\mathrm{V})(10~\mathrm{A})=1.2\times10^3~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-eebb2dd3b98305b457f58ac8c2120101_l3.svg "Rendered by QuickLaTeX.com")
 , we find
, we find![\[\mathcal{E}_i=80~\mathrm{V},~~~P_{\mathrm{m}}=1.6\times10^3~\mathrm{W},~~~P_R=8.0\times10^2~\mathrm{W},~\mathrm{and}~P_s=2.4\times10^3~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bb1af8b23b0eda46eb4ba41c382738e4_l3.svg "Rendered by QuickLaTeX.com")
 .
. or
or  are written upon the spinning hard drive. Therefore, most hard drive readout devices do not work on the principle of induction, but use a technique known as
are written upon the spinning hard drive. Therefore, most hard drive readout devices do not work on the principle of induction, but use a technique known as 
 electric vehicles is that the lifetime of the battery is not as long as the time you get to drive on a full tank of gas. To increase the amount of charge in the battery during driving, the motor can act as a generator whenever the car is braking, taking advantage of the back emf produced. This extra emf can be newly acquired stored energy in the car’s battery, prolonging the life of the battery.
electric vehicles is that the lifetime of the battery is not as long as the time you get to drive on a full tank of gas. To increase the amount of charge in the battery during driving, the motor can act as a generator whenever the car is braking, taking advantage of the back emf produced. This extra emf can be newly acquired stored energy in the car’s battery, prolonging the life of the battery.





 where
where 

 , with
, with  a more complicated relationship that can’t be simplified as shown in the example.
a more complicated relationship that can’t be simplified as shown in the example.


 where
where  The coil is placed in a spatially uniform magnetic field of magnitude
The coil is placed in a spatially uniform magnetic field of magnitude  (b)
(b)  and (c)
and (c) 
 with the plane of the coil making an angle of (a)
with the plane of the coil making an angle of (a)  (b)
(b)  and (c)
and (c)  If a magnetic field perpendicular to the loop is changing at a rate of
If a magnetic field perpendicular to the loop is changing at a rate of  what is the current in the loop?
what is the current in the loop? The magnetic field at all points inside the coil varies according to
The magnetic field at all points inside the coil varies according to  where
where  and
and  What is the current induced in the coil at (a)
What is the current induced in the coil at (a)  (b)
(b)  (c)
(c)  turns per centimetre has a cross-sectional area of
turns per centimetre has a cross-sectional area of  and carries a current of
and carries a current of  A coil with five turns encircles the solenoid. When the current through the solenoid is turned off, it decreases to zero in
A coil with five turns encircles the solenoid. When the current through the solenoid is turned off, it decreases to zero in  What is the average emf induced in the coil?
What is the average emf induced in the coil? with
with  in tesla. Determine the emf induced in the loop as a function of time.
in tesla. Determine the emf induced in the loop as a function of time. How much charge moves through the wire while the field is changing?
How much charge moves through the wire while the field is changing? lies in a plane perpendicular to a spatially uniform magnetic field. During a
lies in a plane perpendicular to a spatially uniform magnetic field. During a  time interval, the magnitude of the field increases uniformly from
time interval, the magnitude of the field increases uniformly from  (a) Determine the emf induced in the loop. (b) If the magnetic field is directed out of the page, what is the direction of the current induced in the loop?
(a) Determine the emf induced in the loop. (b) If the magnetic field is directed out of the page, what is the direction of the current induced in the loop? where
where  (c)
(c)  (d)
(d)  and (e)
and (e)  where
where  resistor at (a)
resistor at (a)  and (c)
and (c)  in a location where the Earth’s horizontal magnetic field is
in a location where the Earth’s horizontal magnetic field is  What is the maximum possible emf induced in the antenna due to this motion?
What is the maximum possible emf induced in the antenna due to this motion? What then is the emf induced in the loop when its trailing side is a distance d from the right edge of the magnetic field region?
What then is the emf induced in the loop when its trailing side is a distance d from the right edge of the magnetic field region? It is rotated in
It is rotated in  from a position where its plane is perpendicular to Earth’s magnetic field to one where its plane is parallel to the field. If the strength of the field is
from a position where its plane is perpendicular to Earth’s magnetic field to one where its plane is parallel to the field. If the strength of the field is  what is the average emf induced in the coil?
what is the average emf induced in the coil? The velocity is in the same plane as the rails and directed at an angle
The velocity is in the same plane as the rails and directed at an angle  with a constant velocity of magnitude
with a constant velocity of magnitude  What is the potential difference between the ends of the rod? Which end of the rod is at a higher potential?
What is the potential difference between the ends of the rod? Which end of the rod is at a higher potential? rod moves at
rod moves at  in a plane perpendicular to a magnetic field of strength
in a plane perpendicular to a magnetic field of strength  The rod moves to the left at
The rod moves to the left at  If
If  everywhere in the region, what is the current in the circuit (a) when
everywhere in the region, what is the current in the circuit (a) when  ? (b) when
? (b) when  ? Specify also the sense of the current flow.
? Specify also the sense of the current flow. resistor? Does the current circulate clockwise or counterclockwise?
resistor? Does the current circulate clockwise or counterclockwise? which is directly into the page. The rod is pulled to the right at a constant speed of
which is directly into the page. The rod is pulled to the right at a constant speed of  The only significant resistance in the circuit comes from the
The only significant resistance in the circuit comes from the  resistor shown. (a) What is the emf induced in the circuit? (b) What is the induced current? Does it circulate clockwise or counter clockwise? (c) What is the magnitude of
resistor shown. (a) What is the emf induced in the circuit? (b) What is the induced current? Does it circulate clockwise or counter clockwise? (c) What is the magnitude of  seconds. Assume that the magnetic field is cylindrically symmetric with respect to the central axis of the coil.
seconds. Assume that the magnetic field is cylindrically symmetric with respect to the central axis of the coil. Calculate the induced electric field as a function of distance
Calculate the induced electric field as a function of distance 
 after which it decreases at a constant rate to zero in
after which it decreases at a constant rate to zero in  (a) What is the electric field in the regions where
(a) What is the electric field in the regions where  interval? (b) Assume that
interval? (b) Assume that  How much work is done by the electric field on a proton that is carried once clock wise around a circular path of radius
How much work is done by the electric field on a proton that is carried once clock wise around a circular path of radius  ? (d) At the instant when
? (d) At the instant when  a proton enters the magnetic field at
a proton enters the magnetic field at  as shown. What are the electric and magnetic forces on the proton at that instant?
as shown. What are the electric and magnetic forces on the proton at that instant? and decreases uniformly to zero in
and decreases uniformly to zero in  What is the electric field (both magnitude and direction) as a function of
What is the electric field (both magnitude and direction) as a function of  A circular loop of wire of radius
A circular loop of wire of radius  surrounds the solenoid. Find the electrical current induced in the loop.
surrounds the solenoid. Find the electrical current induced in the loop. is varied with time at a rate of
is varied with time at a rate of  will produce an emf
will produce an emf  where
where  and
and 
 that has sides of length
that has sides of length  If the maximum emf produced in the coil is
If the maximum emf produced in the coil is  what is the angular velocity of the coil?
what is the angular velocity of the coil? rectangular coil with dimensions
rectangular coil with dimensions  rotates in a uniform magnetic field of magnitude
rotates in a uniform magnetic field of magnitude  at
at  (a) Determine the emf induced in the coil as a function of time. (b) If the coil is connected to a
(a) Determine the emf induced in the coil as a function of time. (b) If the coil is connected to a  resistor, what is the power as a function of time required to keep the coil turning at
resistor, what is the power as a function of time required to keep the coil turning at  ? (c) Answer part (b) if the coil is connected to a
? (c) Answer part (b) if the coil is connected to a  resistor.
resistor. and is
and is  its peak output voltage is
its peak output voltage is  (a) What is the frequency of the output voltage? (b) What is the strength of the magnetic field in which the coil is turning?
(a) What is the frequency of the output voltage? (b) What is the strength of the magnetic field in which the coil is turning? wound with fine conducting wire. The coil is attached to a ballistic galvanometer, a device that measures the total charge that passes through it. The coil is placed in a magnetic field
wound with fine conducting wire. The coil is attached to a ballistic galvanometer, a device that measures the total charge that passes through it. The coil is placed in a magnetic field  and the total charge
and the total charge  of copper wire. The total resistance of the coil and ballistic galvanometer is
of copper wire. The total resistance of the coil and ballistic galvanometer is  When the coil is flipped through
When the coil is flipped through  a change of
a change of  flows through the ballistic galvanometer. (a) Assuming that
flows through the ballistic galvanometer. (a) Assuming that  what is the reading of the galvanometer?
what is the reading of the galvanometer? series-wound motor has a field resistance of
series-wound motor has a field resistance of  and an armature resistance of
and an armature resistance of  When it is operating at full speed, a back emf of
When it is operating at full speed, a back emf of  is generated. (a) What is the initial current drawn by the motor? When the motor is operating at full speed, where are (b) the current drawn by the motor, (c) the power output of the source, (d) the power output of the motor, and (e) the power dissipated in the two resistances?
is generated. (a) What is the initial current drawn by the motor? When the motor is operating at full speed, where are (b) the current drawn by the motor, (c) the power output of the source, (d) the power output of the motor, and (e) the power dissipated in the two resistances? What is the back emf when the motor is operating normally?
What is the back emf when the motor is operating normally? what is the time rate of change of the current in the wire?
what is the time rate of change of the current in the wire? slides outward at a constant speed of
slides outward at a constant speed of  over two parallel rails separated by a distance of
over two parallel rails separated by a distance of  find the magnitude and direction of the induced current if resistance of the loop is
find the magnitude and direction of the induced current if resistance of the loop is 
 (a) Determine the induced emf between the ends of the rod when it is not moving. (b) Determine the emf when the rod is moving perpendicular to its length and magnetic field with a speed of
(a) Determine the induced emf between the ends of the rod when it is not moving. (b) Determine the emf when the rod is moving perpendicular to its length and magnetic field with a speed of 
 magnetic field. If the coil is flipped over (rotated through
magnetic field. If the coil is flipped over (rotated through  what is the average emf induced in it?
what is the average emf induced in it? planer loop of flexible wire is placed inside a long solenoid of
planer loop of flexible wire is placed inside a long solenoid of  The area
The area 
 and
and  what is the emf induced in the loop when
what is the emf induced in the loop when  ?
? which is directed into the page. The resistances of the rod and the rails are negligible, but the section PQ has a resistance of
which is directed into the page. The resistances of the rod and the rails are negligible, but the section PQ has a resistance of  (a) What is the emf (including its sense) induced in the rod when it is moving to the right with a speed of
(a) What is the emf (including its sense) induced in the rod when it is moving to the right with a speed of  due to the changing current through the electromagnet. Determine the electric field at a distance
due to the changing current through the electromagnet. Determine the electric field at a distance  where
where  (see the following figure). Find the magnitude and direction of current induced in the outer loops at time
(see the following figure). Find the magnitude and direction of current induced in the outer loops at time 
 from its power source when operating at full speed, and it draws
from its power source when operating at full speed, and it draws  When connected to a
When connected to a  (a) How large is the back emf? (b) What current will the motor draw just after it is turned on? Can you suggest a way to avoid this large initial current?
(a) How large is the back emf? (b) What current will the motor draw just after it is turned on? Can you suggest a way to avoid this large initial current? copper sheet drops through a uniform horizontal magnetic field of
copper sheet drops through a uniform horizontal magnetic field of  and it reaches a terminal velocity of
and it reaches a terminal velocity of  (a) What is the net magnetic force on the sheet after it reaches terminal velocity? (b) Describe the mechanism responsible for this force. (c) How much power is dissipated as Joule heating while the sheet moves at terminal velocity?
(a) What is the net magnetic force on the sheet after it reaches terminal velocity? (b) Describe the mechanism responsible for this force. (c) How much power is dissipated as Joule heating while the sheet moves at terminal velocity? rotates at
rotates at  around the axis through its centre and perpendicular to its face. The disk is in a uniform magnetic field
around the axis through its centre and perpendicular to its face. The disk is in a uniform magnetic field  that is directed along the axis. What is the potential difference between the rim and the axis of the disk?
that is directed along the axis. What is the potential difference between the rim and the axis of the disk? respectively, and the current in each solenoid is changing such that
respectively, and the current in each solenoid is changing such that  What are the currents in the resistors of the circuit?
What are the currents in the resistors of the circuit? The current through the solenoid increases according to
The current through the solenoid increases according to  where
where  and
and  What is the emf induced in the coil when (a)
What is the emf induced in the coil when (a)  and (c)
and (c)  ?
? length
length  mass
mass  and resistance
and resistance  (b) Calculate the work per unit time done by the force of gravity. (c) Compare this with the power dissipated in the Joule heating of the bar. (d) What would happen if
(b) Calculate the work per unit time done by the force of gravity. (c) Compare this with the power dissipated in the Joule heating of the bar. (d) What would happen if  while in a uniform magnetic field directed parallel to the rotational axis. The brush leads of a voltmeter are connected to the dark’s inner and outer surfaces as shown. What is the reading of the voltmeter?
while in a uniform magnetic field directed parallel to the rotational axis. The brush leads of a voltmeter are connected to the dark’s inner and outer surfaces as shown. What is the reading of the voltmeter? is placed inside a copper ring such that both objects have the same central axis. The radius of the ring is
is placed inside a copper ring such that both objects have the same central axis. The radius of the ring is  and the radius of the solenoid is
and the radius of the solenoid is  and changing at a rate of
and changing at a rate of  ? (b) What is the emf induced in the ring when
? (b) What is the emf induced in the ring when  and
and  ? (c) What is the electric field inside the ring for these two cases? (d) Suppose the ring is moved so that its central axis and the central axis of the solenoid are still parallel but no longer coincide. (You should assume that the solenoid is still inside the ring.) Now what is the emf induced in the ring? (e) Can you calculate the electric field in the ring as you did in part (c)?
? (c) What is the electric field inside the ring for these two cases? (d) Suppose the ring is moved so that its central axis and the central axis of the solenoid are still parallel but no longer coincide. (You should assume that the solenoid is still inside the ring.) Now what is the emf induced in the ring? (e) Can you calculate the electric field in the ring as you did in part (c)? where
where  and
and  ? The resistance of the loop is
? The resistance of the loop is  coil with a
coil with a  area is spun in Earth’s
area is spun in Earth’s  maximum emf. (a) At what angular velocity must the coil be spun? (b) What is unreasonable about this result? (c) Which assumption or premise is responsible?
maximum emf. (a) At what angular velocity must the coil be spun? (b) What is unreasonable about this result? (c) Which assumption or premise is responsible? perpendicular to the axis of rotation. (a) Find an expression for the time-dependent flux through the ring (b) Determine the time-dependent current through the ring if it has a resistance of
perpendicular to the axis of rotation. (a) Find an expression for the time-dependent flux through the ring (b) Determine the time-dependent current through the ring if it has a resistance of  where
where  Find the magnitude and direction of current induced in the outer loops at time
Find the magnitude and direction of current induced in the outer loops at time  and resistance
and resistance  is in a region of uniform magnetic field that is perpendicular to the area enclosed by the ring and horizontal to Earth’s surface (see below). The loop is let go from rest when it is at the edge of the nonzero magnetic field region. (a) Find an expression for the speed when the loop just exits the region of uniform magnetic field. (b) If it was let go at
is in a region of uniform magnetic field that is perpendicular to the area enclosed by the ring and horizontal to Earth’s surface (see below). The loop is let go from rest when it is at the edge of the nonzero magnetic field region. (a) Find an expression for the speed when the loop just exits the region of uniform magnetic field. (b) If it was let go at 


 ? Assume that the magnetic field of the induced current is negligible compared to
? Assume that the magnetic field of the induced current is negligible compared to  It is found to slow down. How far does the bar go before coming to rest? Assume that the magnetic field of the induced current is negligible compared to
It is found to slow down. How far does the bar go before coming to rest? Assume that the magnetic field of the induced current is negligible compared to  is confined in a cylindrical region of radius
is confined in a cylindrical region of radius  is placed in the region, as shown below. Show that the emf between the ends of the rod is given by
is placed in the region, as shown below. Show that the emf between the ends of the rod is given by  (Hint: To find the emf between the ends, we need to integrate the electric field from one end to the other. To find the electric field, use Faraday’s law as “Ampère’s law for E.”)
(Hint: To find the emf between the ends, we need to integrate the electric field from one end to the other. To find the electric field, use Faraday’s law as “Ampère’s law for E.”)
 and
and  turns and carry currents
turns and carry currents  , whereas the flux through a single turn of coil 1 due to the magnetic field of
, whereas the flux through a single turn of coil 1 due to the magnetic field of  .
.
 of coil 2 with respect to coil 1 is the ratio of the flux through the
of coil 2 with respect to coil 1 is the ratio of the flux through the 

 ) in honour of Joseph
) in honour of Joseph  . From Equation
. From Equation  , so we usually drop the subscripts associated with mutual inductance and write
, so we usually drop the subscripts associated with mutual inductance and write
 is the total flux through coil 2 due to
is the total flux through coil 2 due to 

 and
and  do not necessarily represent the total emfs in the respective coils. Each coil can also have an emf induced in it because of its self-inductance (self-inductance will be discussed in more detail in a later section).
do not necessarily represent the total emfs in the respective coils. Each coil can also have an emf induced in it because of its self-inductance (self-inductance will be discussed in more detail in a later section).
 , radius
, radius  ,
,  ,
,  ,
,  and the current in the solenoid is changing at a rate of
and the current in the solenoid is changing at a rate of  , what is the emf induced in the surrounding coil?
, what is the emf induced in the surrounding coil?
 and is directed parallel to the solenoid’s axis. We can use this magnetic field to find the magnetic flux through the surrounding coil and then use this flux to calculate the mutual inductance for part (a), using Equation
and is directed parallel to the solenoid’s axis. We can use this magnetic field to find the magnetic flux through the surrounding coil and then use this flux to calculate the mutual inductance for part (a), using Equation ![\[\Phi_{21}=B_1\piR_1^2=\frac{\mu_0N_1I_1}{l_1}\piR_1^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4a59d9f5e34ba0eb89c148b96a9e5ccb_l3.svg "Rendered by QuickLaTeX.com")
![\[M=\frac{N_2\Phi_{21}}{I_1}=\left(\frac{N_2}{I_1}\right)\left(\frac{\mu_0N_1I_1}{l_1}\piR_1^2=\frac{\mu_0N_1N_2\pi R_1^2}{l_1}.\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-95f7c8f99d707bac8f45e0239d6c00f9_l3.svg "Rendered by QuickLaTeX.com")


 , we do know the result of this calculation.
, we do know the result of this calculation. flows through the solenoid of part (b) of Example 11.1.1. What is the maximum emf induced in the surrounding coil?
flows through the solenoid of part (b) of Example 11.1.1. What is the maximum emf induced in the surrounding coil?




 , so the induced emf may be written in terms of the self-inductance as
, so the induced emf may be written in terms of the self-inductance as
 and calculate
and calculate ![\[L=\frac{|\mathcal{E}|}{|dI/dt|}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2ca32df7982ca5a21f1f49279c8d58c9_l3.svg "Rendered by QuickLaTeX.com")




 is measured across a coil of
is measured across a coil of  to
to  . (a) What is the self-inductance of the coil? (b) With the current at
. (a) What is the self-inductance of the coil? (b) With the current at ![\[L=\frac{\mathcal{E}}{dI/dt}=\frac{2.0~\mathrm{V}}{5.0~\mathrm{A}/0.10~\mathrm{s}}4.0\times10^{-2}~\mathrm{H}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8b06fa1b86ec2c6100086348cf9c8100_l3.svg "Rendered by QuickLaTeX.com")
 , so
, so ![\[\Phi_{\mathrm{m}}=\frac{(4.0\times10^{-2}~\mathrm{H})(5.0\mathrm{A})}{50~\mathrm{turns}}=4.0\times10^{-3}~\mathrm{Wb}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ea0f680c20a74349efcccb9e50aad972_l3.svg "Rendered by QuickLaTeX.com")
 inductor. What is the rate at which the current is changing?
inductor. What is the rate at which the current is changing? .
.


 is the number of turns per unit length of the solenoid, we may write Equation
is the number of turns per unit length of the solenoid, we may write Equation 
 is the volume of the solenoid. Notice that the self-inductance of a long solenoid depends only on its physical properties (such as the number of turns of wire per unit length and the volume), and not on the magnetic field or the current. This is true for inductors in general.
is the volume of the solenoid. Notice that the self-inductance of a long solenoid depends only on its physical properties (such as the number of turns of wire per unit length and the volume), and not on the magnetic field or the current. This is true for inductors in general.
 shown in
shown in 


 , and is
, and is  in
in  when a current of
when a current of  flows through it? Assume that the solenoid has
flows through it? Assume that the solenoid has  and is wound from wire of diameter
and is wound from wire of diameter 


 , so the power absorbed by the inductor is
, so the power absorbed by the inductor is


![\[\oint\vec{\mathbf{B}}\cdot d\vec{\mathbf{l}}=B(2\pi r)=\mu_0I.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a6b098b527364d0e0d2329bd784b884e_l3.svg "Rendered by QuickLaTeX.com")
 , since no net current crosses the area bounded by a circular path where
, since no net current crosses the area bounded by a circular path where ![\[u_{\mathrm{m}}=\frac{B^2}{2\mu_0}=\frac{\mu_0I^2}{8\pi^2r^2},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e07199432ba3bc8933b58e6d81812a69_l3.svg "Rendered by QuickLaTeX.com")
![\[u_{\mathrm{m}}=\frac{B^2}{2\mu_0}=\frac{\mu_0I^2}{8\pi^2r^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-600cc5552fe06da4a60faf9656a3bd3b_l3.svg "Rendered by QuickLaTeX.com")
![\[U=\int_{R_1}^{R_2}dU=\int_{R_1}^{R_2}\frac{\mu_0I^2}{8\pi^2r^2}(2\pi rl)dr=\frac{\mu_0I^2l}{4\pi}\ln\frac{R_2}{R_1},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-20debdd1464f85e8cde351cd0b53c9cb_l3.svg "Rendered by QuickLaTeX.com")
 .
.![\[U=\frac{1}{2}LI^2,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-13c37a90e52f893ef988004566984cb0_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{L}{l}\frac{\mu_0}{2\pi}\ln\frac{R_2}{R_1}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a48c9d33786e1f3df2f4b118016db3a4_l3.svg "Rendered by QuickLaTeX.com")
 circuit.
circuit.  and
and  . When
. When 
 . However, from Faraday’s law, the increasing current produces an emf
. However, from Faraday’s law, the increasing current produces an emf  across the inductor. In accordance with Lenz’s law, the induced emf counteracts the increase in the current and is directed as shown in the figure. As a result,
across the inductor. In accordance with Lenz’s law, the induced emf counteracts the increase in the current and is directed as shown in the figure. As a result, 


 is directly proportional to
is directly proportional to 

 .
. tells us how rapidly the current increases to its final value. At
tells us how rapidly the current increases to its final value. At  , the current in the circuit is, from Equation
, the current in the circuit is, from Equation 
 of the final value
of the final value  , the more rapidly the current approaches
, the more rapidly the current approaches  and Equation
and Equation 
 is
is 
 of its initial value after one time constant. The shorter the time constant
of its initial value after one time constant. The shorter the time constant  . With Kirchhoff’s loop rule, we obtain
. With Kirchhoff’s loop rule, we obtain


 , and it decays to zero like the current. The energy stored in the magnetic field of the inductor,
, and it decays to zero like the current. The energy stored in the magnetic field of the inductor,  , also decreases exponentially with time, as it is dissipated by Joule heating in the resistance of the circuit.
, also decreases exponentially with time, as it is dissipated by Joule heating in the resistance of the circuit.
 ,
,  , and
, and 
 , and as
, and as ![\[\tau_L\frac{L}{R}=\frac{4.0~\mathrm{H}}{4.0~\Omega}=1.0~\mathrm{s}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5282e406e4cfb1311ce999b6f758915f_l3.svg "Rendered by QuickLaTeX.com")
![\[I(t)=\frac{\mathcal{E}}{R}(1-e^{-t/\tau_L}}).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-801fca968a0ca12284f94454ae6dc07a_l3.svg "Rendered by QuickLaTeX.com")
![\[(1-e^{-t/\tau_L})=(1-1)=0;~\mathrm{so}~I(0)=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e105b8564d3f81366da1469b9232faec_l3.svg "Rendered by QuickLaTeX.com")
![\[I(2.0\tau_L)=\frac{\mathcal{E}}{R}(1-e^{-2.0})=(0.50~\mathrm{A})(0.86)=0.43~\mathrm{A},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-549794999b08e81b7c9b64f5a9aa4c25_l3.svg "Rendered by QuickLaTeX.com")
![\[I(\infty)=\frac{\mathcal{E}}{R}=0.50~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a2c321e6b816f2f566d3d680cdffa021_l3.svg "Rendered by QuickLaTeX.com")
![\[|V_L(t)|=\mathcal{E}e^{-t/\tau_L}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cf04ee14ed82f37074ed99d8d1f87515_l3.svg "Rendered by QuickLaTeX.com")
![\[|V_L(0)|=\mathcal{E}=2.0~\mathrm{V},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7bc3cc6baf377084546faed9f5a143c9_l3.svg "Rendered by QuickLaTeX.com")
![\[|V_L(2.0\tau_L)|=(2.0~\mathrm{V})e^{-2.0}=0.27~\mathrm{V},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b8e40ec94ffe5526cb0435879680dcdf_l3.svg "Rendered by QuickLaTeX.com")
![\[|V_L(\infty)|=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b6c4b81cf6764f59dc6a8ec173d17367_l3.svg "Rendered by QuickLaTeX.com")

 of its maximum value?
of its maximum value?![\[I(t)=\frac{\mathcal{E}}{R}e^{-t/\tau_L}=I(0)e^{-t/\tau_L}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1df939422396c14b0d237851efa0a3cc_l3.svg "Rendered by QuickLaTeX.com")
![\[I(t)=0.50I(0)~\mathrm{so}~e^{-t/\tau_L}=0.50,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-11cafc7ac702967350c856e6a48e1072_l3.svg "Rendered by QuickLaTeX.com")
![\[t=-\ln(0.50)\tau_L=0.69(1.0~\mathrm{s})=0.69~\mathrm{s},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bee095054dc6f5713c19cb19d9e5b314_l3.svg "Rendered by QuickLaTeX.com")
![\[U_L(t)=\frac{1}{2}L[I(t)]^2=\frac{1}{2}L\left(\frac{\mathcal{E}}{R}e^{-t/\tau_L}\right)^2=\frac{L\mathcal{E}^2}{2R^2}e^{-2t/\tau_L}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-db0926d2da58fd0d9b91e7610104b6d7_l3.svg "Rendered by QuickLaTeX.com")
![\[U_L(t)=(0.010)U_L(0)~\mathrm{or}~\frac{L\mathcal{E}^2}{2R^2}e^{-2t/\tau_L}=(0.010)\frac{L\mathcal{E}^2}{2R^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ceef765f76d90e172aa14297dbc8c778_l3.svg "Rendered by QuickLaTeX.com")
![\[-\frac{2t}{\tau_L}=\ln(0.010),\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1a8c3b2fbc39ed30de0820ea11fb961a_l3.svg "Rendered by QuickLaTeX.com")
![\[t=-\frac{1}{2}\tau_L\ln(0.010).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6269a325ac1270a45cafe688b192deb8_l3.svg "Rendered by QuickLaTeX.com")
 , the time it takes for the energy stored in the inductor to decrease to
, the time it takes for the energy stored in the inductor to decrease to ![\[t=-\frac{1}{2}(1.0~\mathrm{s})\ln(0.010)=2.3~\mathrm{s}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5dc5fd53bc57927c920d9e354a5af9f5_l3.svg "Rendered by QuickLaTeX.com")
 have the dimensions of time.
have the dimensions of time. , what is the inductive time constant? (b) If
, what is the inductive time constant? (b) If  resister, what is the time taken for the current to reach
resister, what is the time taken for the current to reach 
 circuit is shown in
circuit is shown in  before the switch is closed, then all the energy of the circuit is initially stored in the electric field of the capacitor (
before the switch is closed, then all the energy of the circuit is initially stored in the electric field of the capacitor (



 and the current is
and the current is  , the total energy
, the total energy ![\[\frac{q^2(t)}{2C}+\frac{Li^2(t)}{2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3e8df56200842641da511529b5dab303_l3.svg "Rendered by QuickLaTeX.com")

 , and the spring, which has potential energy
, and the spring, which has potential energy  . With the absence of friction in the mass-spring system, the oscillations would continue indefinitely. Similarly, the oscillations of an
. With the absence of friction in the mass-spring system, the oscillations would continue indefinitely. Similarly, the oscillations of an  , the total electromagnetic energy
, the total electromagnetic energy 
 , the total mechanical energy
, the total mechanical energy 
 , and
, and  is given by
is given by




 .
. and the capacitance is
and the capacitance is  . At
. At  . (a) What is the angular frequency of the oscillations in the circuit? (b) What is the maximum current flowing through circuit? (c) How long does it take the capacitor to become completely discharged? (d) Find an equation that represents
. (a) What is the angular frequency of the oscillations in the circuit? (b) What is the maximum current flowing through circuit? (c) How long does it take the capacitor to become completely discharged? (d) Find an equation that represents ![\[\omega=\sqrt{\frac{1}{LC}}=\sqrt{\frac{1}{(2.0\times10^{-2}~\mathrm{H})(8.0\times10^{-6}~\mathrm{F})}}=2.5\times10^3~\mathrm{rad/s}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f2fbf0809ae2b3c2b17828e923beffc5_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{1}{2}LI_0^2=\frac{1}{2}\frac{q_0^2}{C},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1b3e77f3c4ae9ab77604ea3a8726c0be_l3.svg "Rendered by QuickLaTeX.com")
![\[I_0=\sqrt{\frac{1}{LC}}q_0=(2.5\times10^3~\mathrm{rad/s})(1.2\times10^{-5}~\mathrm{C})=3.0\times10^{-2}~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5fbae5f24487be0d912b7adb5f70dc73_l3.svg "Rendered by QuickLaTeX.com")
 , where
, where ![\[T=\frac{2\pi}{\omega}=\frac{2\pi}{2.5\times10^3~\mathrm{rad/s}}=2.5\times10^{-3}~\mathrm{s},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a255c78dfac4db513316272909a68851_l3.svg "Rendered by QuickLaTeX.com")
 .
.
![\[q(0)=q_0=q_0\cos\phi.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fe9ee07a540f1f8a14a575cb5d4e1a49_l3.svg "Rendered by QuickLaTeX.com")
![\[q(t)=(1.2\times10^{-5}~\mathrm{C})\cos(2.5\times10^3t).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-650a83ce3443e4b5c792d849cafac717_l3.svg "Rendered by QuickLaTeX.com")
 . (a) If
. (a) If  what is
what is  ) series circuit
) series circuit
 . With
. With 


![\[m\frac{d^2x}{dt^2}+b\frac{dx}{dt}+kx=0,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a757c8977f84bbab7e2eaa7a5ddaade6_l3.svg "Rendered by QuickLaTeX.com")
 . Therefore, the result can be underdamped (
. Therefore, the result can be underdamped ( ), critically damped (
), critically damped ( ), or overdamped (
), or overdamped ( ). By analogy, the solution
). By analogy, the solution  , we obtain
, we obtain

 ,
,  , and
, and  . (a) Is the circuit underdamped, critically damped, or overdamped? (b) If the circuit starts oscillating with a charge of
. (a) Is the circuit underdamped, critically damped, or overdamped? (b) If the circuit starts oscillating with a charge of  on the capacitor, how much energy has been dissipated in the resistor by the time the oscillations cease?
on the capacitor, how much energy has been dissipated in the resistor by the time the oscillations cease? ; it is also expressed as a volt second per ampere
; it is also expressed as a volt second per ampere












 in one circuit induces an emf
in one circuit induces an emf  in the second:
in the second: ![\[\mathcal{E}_2=-M\frac{dI_1}{dt},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cb700bc16e52451c33221ed1051acddf_l3.svg "Rendered by QuickLaTeX.com")
 through the second circuit induces an emf
through the second circuit induces an emf  in the first:
in the first: ![\[\mathcal{E}_1=-M\frac{dI_2}{dt},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ed0bdb36a56b8d1b0647bc9c1ed8a4b3_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{E}=-L\frac{dI}{dt},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d9ff090d59d4b2452a656fde23da78bd_l3.svg "Rendered by QuickLaTeX.com")
 ), where
), where 
![\[L=\frac{\mu_0N^2A}{l},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4a36533aabedd2b0deb2977da147f5ab_l3.svg "Rendered by QuickLaTeX.com")
![\[L=\frac{\mu_0N^2h}{2\pi}\ln\frac{R_2}{R_1},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4c39c319ab8d4017bfbaac1081f1ac12_l3.svg "Rendered by QuickLaTeX.com")
![\[U=\frac{1}{2}LI^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-08df6f35d5f31dd17670116bf9477dae_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{L}{l}=\frac{\mu_0}{2\pi}\ln\frac{R_2}{R_1}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ad0865208c23a3cb201c02e81db14b4c_l3.svg "Rendered by QuickLaTeX.com")
![\[I(t)=\frac{\mathcal{E}}{R}(1-e^{-Rt/L})=\frac{\mathcal{E}}{R}(1-e^{-t/\tau_L})~~~(\mathrm{turning~on})\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-de82a06582fb7ed9ae27b798ea478efa_l3.svg "Rendered by QuickLaTeX.com")

 where
where  the current rises from zero to
the current rises from zero to  and to
and to 
![\[I(t)=\frac{\mathcal{E}}{R}e^{-t/\tau_L}~~~(\mathrm{turning~off}).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6ff7b7ce80decf5f914ffbcfa3be20aa_l3.svg "Rendered by QuickLaTeX.com")
 in the first time interval
in the first time interval  of the remainder toward zero in each subsequent time
of the remainder toward zero in each subsequent time 
![\[q(t)=q_0\cos(\omega t+\phi),\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b99d3ea3cc22d3454302d706a20426d7_l3.svg "Rendered by QuickLaTeX.com")
![\[i(t)=-\omega q_0\sin(\omega t+\phi).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0d20bfbd4b539aa6ce49253f2f1cdb32_l3.svg "Rendered by QuickLaTeX.com")
![\[q(t)=q_0e^{-Rt/2L}\cos(\omega't+\phi).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-772771027a5cb27ae0ac367d054a6077_l3.svg "Rendered by QuickLaTeX.com")
![\[\omega'=\sqrt{\frac{1}{LC}-\left(\frac{R}{2L}\right)^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-af10dd99e7b6ffd87997ff30e95eb5cc_l3.svg "Rendered by QuickLaTeX.com")


 ; b.
; b. 
 b.
b. 

 ; b.
; b.  ; c.
; c. 
 ; b.
; b.  or
or  ; c.
; c. 

 and
and  which are both expressions for self-inductance, have the same units.
which are both expressions for self-inductance, have the same units. inductor carries a current of
inductor carries a current of 
 what is the voltage across the inductor? Across the resistor?
what is the voltage across the inductor? Across the resistor? by how much does the steady-state energy stored in the magnetic field of the inductor change?
by how much does the steady-state energy stored in the magnetic field of the inductor change? What problems might you encounter?
What problems might you encounter? an emf of
an emf of  is induced in a second, nearby coil. What is the mutual inductance of the two coils?
is induced in a second, nearby coil. What is the mutual inductance of the two coils? is induced in a coil while the current in a nearby coil is decreasing at a rate of
is induced in a coil while the current in a nearby coil is decreasing at a rate of  What is the mutual inductance of the two coils?
What is the mutual inductance of the two coils? If the current in one coil decays according to
If the current in one coil decays according to  where
where  and
and  what is the emf induced in the second coil immediately after the current starts to decay? At
what is the emf induced in the second coil immediately after the current starts to decay? At  ?
? The solenoid is
The solenoid is  (a) What is the mutual inductance of this system? (b) The outer coil is replaced by a coil of
(a) What is the mutual inductance of this system? (b) The outer coil is replaced by a coil of  solenoid is
solenoid is  long and
long and  in diameter. Inside the solenoid, a small
in diameter. Inside the solenoid, a small  single-turn rectangular coil is fixed in place with its face perpendicular to the long axis of the solenoid. What is the mutual inductance of this system?
single-turn rectangular coil is fixed in place with its face perpendicular to the long axis of the solenoid. What is the mutual inductance of this system? and a cross-sectional area of
and a cross-sectional area of  ; it is wound uniformly with
; it is wound uniformly with  A second toroidal coil of
A second toroidal coil of  is wound uniformly over the first coil. Ignoring the variation of the magnetic field within a toroid, determine the mutual inductance of the two coils.
is wound uniformly over the first coil. Ignoring the variation of the magnetic field within a toroid, determine the mutual inductance of the two coils. and radius
and radius  in
in  What is the self-inductance of the coil?
What is the self-inductance of the coil? coil is changing if an emf of
coil is changing if an emf of  is induced across the coil?
is induced across the coil? current through a
current through a  inductor be switched on or off to induce a
inductor be switched on or off to induce a  carries a current that varies with time according to
carries a current that varies with time according to  Find an expression for the emf induced in the coil.
Find an expression for the emf induced in the coil. of wire. The cross-sectional area of the coil is
of wire. The cross-sectional area of the coil is  What is the self-inductance of the solenoid?
What is the self-inductance of the solenoid? carries a current that decreases at a uniform rate
carries a current that decreases at a uniform rate  What is the emf induced in the coil? Describe the polarity of the induced emf.
What is the emf induced in the coil? Describe the polarity of the induced emf. inductor varies with time, as shown below. The resistance of the inductor is
inductor varies with time, as shown below. The resistance of the inductor is  Calculate the voltage across the inductor at
Calculate the voltage across the inductor at 
 and
and 
 has a radius of
has a radius of  (a) Neglecting end effects, what is the self-inductance per unit length of the solenoid? (b) If the current through the solenoid changes at the rate
(a) Neglecting end effects, what is the self-inductance per unit length of the solenoid? (b) If the current through the solenoid changes at the rate  what is the emf induced per unit length?
what is the emf induced per unit length? windings and a self-inductance of
windings and a self-inductance of  If
If  what is the ratio of its outer radius to its inner radius?
what is the ratio of its outer radius to its inner radius? and whose outer radius is
and whose outer radius is  ?
? is flowing through a coil of wire, the energy stored in its magnetic field is
is flowing through a coil of wire, the energy stored in its magnetic field is  What is the self-inductance of the coil?
What is the self-inductance of the coil? ?
? could be melted by the energy stored in the magnetic field of the inductor? (Hint: Use the value
could be melted by the energy stored in the magnetic field of the inductor? (Hint: Use the value  for ice.)
for ice.) carries a steady current of
carries a steady current of  is flowing in a coaxial cable whose outer radius is five times its inner radius. What is the magnetic field energy stored in a
is flowing in a coaxial cable whose outer radius is five times its inner radius. What is the magnetic field energy stored in a  length of the cable?
length of the cable?
 and
and  Determine (a) the time constant of the circuit, (b) the initial current through the resistor, (c) the final current through the resistor, (d) the current through the resistor when
Determine (a) the time constant of the circuit, (b) the initial current through the resistor, (c) the final current through the resistor, (d) the current through the resistor when  and (e) the voltages across the inductor and the resistor when
and (e) the voltages across the inductor and the resistor when 

 and
and  and (c) the voltages across
and (c) the voltages across 
 What is the time constant of the circuit?
What is the time constant of the circuit? after the switch
after the switch 

 and
and  Find the values of
Find the values of  after the switch is reopened.
after the switch is reopened. is equal to the total energy eventually dissipated in the resistor,
is equal to the total energy eventually dissipated in the resistor, 
 capacitor is charged to
capacitor is charged to  inductor. Determine (a) the maximum energy stored in the magnetic field of the inductor, (b) the peak value of the current, and (c) the frequency of oscillation of the circuit.
inductor. Determine (a) the maximum energy stored in the magnetic field of the inductor, (b) the peak value of the current, and (c) the frequency of oscillation of the circuit. and
and  What is the angular frequency at which the circuit oscillates?
What is the angular frequency at which the circuit oscillates? when the capacitance is
when the capacitance is  ?
? and the maximum current through the inductor is
and the maximum current through the inductor is  (a) What is the period of the oscillations? (b) How much time elapses between an instant when the capacitor is uncharged and the next instant when it is fully charged?
(a) What is the period of the oscillations? (b) How much time elapses between an instant when the capacitor is uncharged and the next instant when it is fully charged? and
and  respectively. (a) What is the frequency of the oscillations? (b) If the maximum potential difference between the plates of the capacitor is
respectively. (a) What is the frequency of the oscillations? (b) If the maximum potential difference between the plates of the capacitor is  what is the maximum current in the circuit?
what is the maximum current in the circuit? Determine the charge on the capacitor and the current through the inductor when energy is shared equally between the electric and magnetic fields. Express your answer in terms of
Determine the charge on the capacitor and the current through the inductor when energy is shared equally between the electric and magnetic fields. Express your answer in terms of 
 and a variable capacitor. If the natural frequency of the circuit is to be adjustable over the range
and a variable capacitor. If the natural frequency of the circuit is to be adjustable over the range  to
to  (the AM broadcast band), what range of capacitance is required?
(the AM broadcast band), what range of capacitance is required?
 and
and  What is the angular frequency of the oscillations?
What is the angular frequency of the oscillations?
 and
and  how much time elapses before the amplitude of the oscillations drops to half its initial value?
how much time elapses before the amplitude of the oscillations drops to half its initial value? inductor of the resulting
inductor of the resulting  of its initial value in
of its initial value in  and the distance between the centres of the wires is
and the distance between the centres of the wires is ![\[L=\frac{\mu_0 l}{\pi}\ln\frac{d-a}{a}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-67acf0ff074c0a7afd204cd7e34cd75b_l3.svg "Rendered by QuickLaTeX.com")
 )
) Using
Using  where
where  (a) If a current of
(a) If a current of  outer radius
outer radius  height
height  and
and  is filled with an iron core of magnetic susceptibility
is filled with an iron core of magnetic susceptibility  (a) What is the self-inductance of the toroid? (b) If the current through the toroid is
(a) What is the self-inductance of the toroid? (b) If the current through the toroid is  current, what is the effective surface current formed by the aligned atomic current loops in the iron core?
current, what is the effective surface current formed by the aligned atomic current loops in the iron core?
 Initially, the capacitor has a charge of
Initially, the capacitor has a charge of  and the current is zero. Calculate the charge on the capacitor (a) five cycles later and (b)
and the current is zero. Calculate the charge on the capacitor (a) five cycles later and (b)  inductor has
inductor has  (a) What voltage is induced to oppose this? (b) What is unreasonable about this result? (c) Which assumption or premise is responsible?
(a) What voltage is induced to oppose this? (b) What is unreasonable about this result? (c) Which assumption or premise is responsible? in the circuit decreases according to the following equation.
in the circuit decreases according to the following equation.![\[\frac{dU}{dt}=-2\beta U,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-86f926bbdbc70e15a42c2ebe6ed73f57_l3.svg "Rendered by QuickLaTeX.com")

![\[Q\equiv\frac{U_{\mathrm{begin}}}{\Delta U_{\mathrm{one~cycle}}}=\frac{1}{R}\sqrt{\frac{L}{C}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f8d3851b2bfd97de4c8bbe2feff177c1_l3.svg "Rendered by QuickLaTeX.com")
 divide
divide  over the next cycle.)
over the next cycle.) Find currents through (a)
Find currents through (a)  as shown below. (a) Use Ampère’s law and find the magnetic field as a function of time from the current in the wire. (b) Determine the magnetic flux through the loop. (c) If the loop has a resistance of
as shown below. (a) Use Ampère’s law and find the magnetic field as a function of time from the current in the wire. (b) Determine the magnetic flux through the loop. (c) If the loop has a resistance of  how much induced current flows in the loop?
how much induced current flows in the loop? is in a region of uniform magnetic field that is perpendicular to the area enclosed by the ring and horizontal to Earth’s surface. The ring is let go from rest when it is at the edge of the nonzero magnetic field region (see below). (a) Find its speed when the ring just exits the region of uniform magnetic field. (b) If it was let go at
is in a region of uniform magnetic field that is perpendicular to the area enclosed by the ring and horizontal to Earth’s surface. The ring is let go from rest when it is at the edge of the nonzero magnetic field region (see below). (a) Find its speed when the ring just exits the region of uniform magnetic field. (b) If it was let go at  and an amplitude of
and an amplitude of  or
or  depending on whether you live in North America or Europe, respectively. Most people know the potential difference for electrical outlets is
depending on whether you live in North America or Europe, respectively. Most people know the potential difference for electrical outlets is  in North America or Europe, but as explained later in the chapter, these voltages are not the peak values given here but rather are related to the common voltages we see in our electrical outlets.
in North America or Europe, but as explained later in the chapter, these voltages are not the peak values given here but rather are related to the common voltages we see in our electrical outlets. 

 and
and  whereas in Europe,
whereas in Europe,  and
and 
 so the
so the 
 For this example, the voltage and current are said to be in phase, meaning that their sinusoidal functional forms have peaks, troughs, and nodes in the same place. They oscillate in sync with each other, as shown in
For this example, the voltage and current are said to be in phase, meaning that their sinusoidal functional forms have peaks, troughs, and nodes in the same place. They oscillate in sync with each other, as shown in 

 If the resistor is a fluorescent light bulb, for example, it brightens and dims
If the resistor is a fluorescent light bulb, for example, it brightens and dims  times per second as the current repeatedly goes through zero. A
times per second as the current repeatedly goes through zero. A  flicker is too rapid for your eyes to detect, but if you wave your hand back and forth between your face and a fluorescent light, you will see the stroboscopic effect of ac.
flicker is too rapid for your eyes to detect, but if you wave your hand back and forth between your face and a fluorescent light, you will see the stroboscopic effect of ac.![\[v(t)=V_0\sin\omega t,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-35ab389c71c8c044c2d7914efc26c0fa_l3.svg "Rendered by QuickLaTeX.com")
 at a time of
at a time of 
 of an ac generator. (b) Symbol used to represent an ac voltage source in a circuit diagram.
of an ac generator. (b) Symbol used to represent an ac voltage source in a circuit diagram.![\[v_R(t)=V_0\sin\omega t\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8da50701dbadfa59df21eafa47ef92de_l3.svg "Rendered by QuickLaTeX.com")
![\[i_R(t)=\frac{v_R(t)}{R}=\frac{V_0}{R}\sin\omega t=I_0\sin\omega t.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-65e8bf2d50987fe9cbb8143abb7c2aef_l3.svg "Rendered by QuickLaTeX.com")

 through the resistor and the voltage
through the resistor and the voltage  across the resistor. The two quantities are in phase.
across the resistor. The two quantities are in phase. is the amplitude of the time-varying current. Plots of
is the amplitude of the time-varying current. Plots of  so we are viewing it at one instant in time. If the length of the arrow corresponds to the current amplitude
so we are viewing it at one instant in time. If the length of the arrow corresponds to the current amplitude  the projection of the rotating arrow onto the vertical axis is
the projection of the rotating arrow onto the vertical axis is  which is the instantaneous current.
which is the instantaneous current.

![\[v_C(t)=V_0\sin\omegat.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9d1ceec36cfaa36d0db415157d46d99a_l3.svg "Rendered by QuickLaTeX.com")

![\[q(t)=Cv_C(t)=CV_0\sin\omega t.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-09396019d3c9762ca9d2290932acfdc4_l3.svg "Rendered by QuickLaTeX.com")
![\[i_C(t)=\frac{dq(t)}{dt}=\omega CV_0\cos\omega t=I_0\cos\omega t,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-247f660fcf0bf45fcd7f689f1c8f84f0_l3.svg "Rendered by QuickLaTeX.com")


![\[i_C(t)=I_0\sin\left(\omega t+\frac{\pi}{2}\right).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-52143ae480f1cf6c8e6207b384050538_l3.svg "Rendered by QuickLaTeX.com")

 is analogous to resistance in a dc circuit in the sense that both quantities are a ratio of a voltage to a current. As a result, they have the same unit, the ohm. Keep in mind, however, that a capacitor stores and discharges electric energy, whereas a resistor dissipates it. The quantity
is analogous to resistance in a dc circuit in the sense that both quantities are a ratio of a voltage to a current. As a result, they have the same unit, the ohm. Keep in mind, however, that a capacitor stores and discharges electric energy, whereas a resistor dissipates it. The quantity 
 through the capacitor and the voltage
through the capacitor and the voltage  across the capacitor. Notice that
across the capacitor. Notice that 
 or a quarter of a cycle.
or a quarter of a cycle.
 However, if we average out the values of current or voltage, these values are zero. Therefore, we often use a second convention called the root mean square value, or rms value, in discussions of current and voltage. The rms operates in reverse of the terminology. First, you square the function, next, you take the mean, and then, you find the square root. As a result, the rms values of current and voltage are not zero. Appliances and devices are commonly quoted with rms values for their operations, rather than peak values. We indicate rms values with a subscript attached to a capital letter (such as
However, if we average out the values of current or voltage, these values are zero. Therefore, we often use a second convention called the root mean square value, or rms value, in discussions of current and voltage. The rms operates in reverse of the terminology. First, you square the function, next, you take the mean, and then, you find the square root. As a result, the rms values of current and voltage are not zero. Appliances and devices are commonly quoted with rms values for their operations, rather than peak values. We indicate rms values with a subscript attached to a capital letter (such as  ).
).


 however, the potential difference across the inductor is
however, the potential difference across the inductor is  because if we consider that the voltage around the loop must equal zero, the voltage gained from the ac source must dissipate through the inductor. Therefore, connecting this with the ac voltage source, we have
because if we consider that the voltage around the loop must equal zero, the voltage gained from the ac source must dissipate through the inductor. Therefore, connecting this with the ac voltage source, we have![\[\frac{di_L(t)}{dt}=\frac{V_0}{L}\sin\omega t.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-08956c78fc08e3e648033b20634e40c4_l3.svg "Rendered by QuickLaTeX.com")

 through the inductor and the voltage
through the inductor and the voltage  across the inductor. Here
across the inductor. Here 
 The relationship between
The relationship between 
 is known as the
is known as the 
 Determine the voltages across and the currents through the circuit elements when the generator is connected to (a) a
Determine the voltages across and the currents through the circuit elements when the generator is connected to (a) a  capacitor, and (c) a
capacitor, and (c) a  inductor.
inductor. of each device and solving for the peak current using
of each device and solving for the peak current using 
![\[v(t)=V_0\sin\omega t=(10~\mathrm{V})\sin(120\pi t),\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4fe3b4d205a2d33bad9dc462dc8b3d9f_l3.svg "Rendered by QuickLaTeX.com")
 is the angular frequency. Since
is the angular frequency. Since  is also the voltage across each of the elements, we have
is also the voltage across each of the elements, we have![\[v(t)=v_R(t)=v_C(t)=v_L(t)=(10~\mathrm{V})\sin(120\pi t).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-3a0b7df1484919b6c410e9a6933c6c21_l3.svg "Rendered by QuickLaTeX.com")
 the amplitude of the current through the resistor is
the amplitude of the current through the resistor is![\[I_0=V_0/R=10~\mathrm{V}/100~\Omega=0.10~\mathrm{A},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-97ea0d7f3f5ae208a863d3034cdd18ab_l3.svg "Rendered by QuickLaTeX.com")
![\[i_R(t)=(0.10~\mathrm{A})\sin(120\pi t).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-996e35794848c0ca39ce29e6ee8631ec_l3.svg "Rendered by QuickLaTeX.com")
![\[X_C=\frac{1}{\omega C}=\frac{1}{(120\pi~\mathrm{rad/s})(10\times10^{-6}~\mathrm{F})}=265~\Omega,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-17771a2ff011b1e7b479100aa592e7b8_l3.svg "Rendered by QuickLaTeX.com")
![\[I_0=\frac{V_0}{X_C}=\frac{10~\mathrm{V}}{265~\Omega}=3.8\times10^{-2}~\mathrm{A}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a99d3bda0deb3691a42871366d6d4a81_l3.svg "Rendered by QuickLaTeX.com")
![\[i_C(t)=(3.8\times10^{-2}~\mathrm{A})\sin\left(120\pi t+\frac{\pi}{2}\right).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2051f32d48122e309cba0d37ee0d128d_l3.svg "Rendered by QuickLaTeX.com")
![\[X_L=\omega L=(120\pi~\mathrm{rad/s})(15\times10^{-3}~\mathrm{H})=5.7~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-96a3638c2ebe30d2fe12b4b198fa8464_l3.svg "Rendered by QuickLaTeX.com")
![\[I_0=\frac{10~\mathrm{V}}{5.7~\Omega}=1.8~\mathrm{A}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a6511148877a552a3c088c8b1a8676eb_l3.svg "Rendered by QuickLaTeX.com")
![\[i_L(t)=(1.8~\mathrm{A})\sin\left(120\pi t-\frac{\pi}{2}\right).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5c0d31b1784fba0e2405f0139897ff17_l3.svg "Rendered by QuickLaTeX.com")

![\[v(t)=V_0\sin\omega t.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cfeed2ffdb3c9836d1e8e88782f14fab_l3.svg "Rendered by QuickLaTeX.com")


![\[i(t)=I_0\sin(\omega t-\phi),\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2173697f297a27945f990fae5c30c565_l3.svg "Rendered by QuickLaTeX.com")



 and
and  its amplitude is
its amplitude is  The
The  The phasor for
The phasor for 

 the emf of the source. Since a component of a sum of vectors is the sum of the components of the individual vectors—for example,
the emf of the source. Since a component of a sum of vectors is the sum of the components of the individual vectors—for example,  —the projection of the vector sum of phasors onto the vertical axis is the sum of the vertical projections of the individual phasors. Hence, if we add vectorially the phasors representing
—the projection of the vector sum of phasors onto the vertical axis is the sum of the vertical projections of the individual phasors. Hence, if we add vectorially the phasors representing 
![\[v_R(t)+v_L(t)+v_C(t)=v(t)=V_0\sin\omega t.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a54722c8829f1052d80e4da73b7df9d7_l3.svg "Rendered by QuickLaTeX.com")

![\[\phi=\tan^{-1}\frac{V_L-V_C}{V_R}=\tan^{-1}\frac{I_0X_L-I_0X_C}{I_0R},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0baf85af0bc3a3c74edac19bdf63bca4_l3.svg "Rendered by QuickLaTeX.com")

![\[V_0\sqrt{{V_R}^2+(V_L-V_C)^2}=\sqrt{(I_0R)^2+(I_0X_L-I_0X_C)^2}=I_0\sqrt{R^2+(X_L-X_C)^2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-75582a336bf3430d749dee94077b7e7b_l3.svg "Rendered by QuickLaTeX.com")





 and an amplitude of
and an amplitude of  If
If 
 and
and  what are (a) the capacitive reactance, (b) the inductive reactance, (c) the impedance, (d) the current amplitude, and (e) the phase difference between the current and the emf of the generator?
what are (a) the capacitive reactance, (b) the inductive reactance, (c) the impedance, (d) the current amplitude, and (e) the phase difference between the current and the emf of the generator?![\[X_C=\frac{1}{\omega C}=\frac{1}{2\pi(200~\mathrm{Hz})(8.00\times10^{-4}~\mathrm{F})}=0.995\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f960897ec67439a58339326d321abd6d_l3.svg "Rendered by QuickLaTeX.com")
![\[X_L=\omega L=2\pi(200~\mathrm{Hz})(3.00\times10^{-3}~\mathrm{H})=3.77~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-636d6152686301cc81e843eb9a76bb91_l3.svg "Rendered by QuickLaTeX.com")
 and
and ![\[Z=\sqrt{(4.00~\Omega)^2+(3.77~\Omega-0.995~\Omega)^2}=4.87~\Omega.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f7fae31ed82adf65c73b43826ffbdab1_l3.svg "Rendered by QuickLaTeX.com")
![\[I_0=\frac{V_0}{Z}=\frac{0.100~\mathrm{V}}{4.87~\Omega}=2.05\times10^{-2}~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a1bb1aea025a479d0830661ec7866725_l3.svg "Rendered by QuickLaTeX.com")
![\[\phi=\tan^{-1}\frac{X_L-X_C}{R}=\tan^{-1}\frac{2.77~\Omega}{4.00~\Omega}=0.607~\mathrm{rad}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0b01d6493e791c45d1e57c3bcfa2e8a2_l3.svg "Rendered by QuickLaTeX.com")
 where
where  is also time dependent. A plot of
is also time dependent. A plot of  for various circuit elements is shown in
for various circuit elements is shown in 
 whereas for (b) the capacitor and (c) the inductor,
whereas for (b) the capacitor and (c) the inductor,  (d) For the source,
(d) For the source,  which may be positive, negative, or zero, depending on
which may be positive, negative, or zero, depending on ![\[P_{\mathrm{ave}}=\frac{1}{T}\int_0^Tp(t)dt,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-32a8622564f6ac7a6da29d64fad959a1_l3.svg "Rendered by QuickLaTeX.com")
 is the period of the oscillations. With the substitutions
is the period of the oscillations. With the substitutions  and
and  this integral becomes
this integral becomes![\[P_{\mathrm{ave}}=\frac{I_0V_0}{T}\int_0^T\sin(\omega t-\phi)\sin\omega t\,dt,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e39000056ffe94e2f0da38a9eb963e31_l3.svg "Rendered by QuickLaTeX.com")
 we obtain
we obtain![\[P_{\mathrm{ave}}=\frac{I_0V_0\cos\phi}{T}\int_0^T\sin\omega t\,dt-\frac{I_0V_0\sin\phi}{T}\int_0^T\sin^2\omega t\,\cos\omega t\,\,dt.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cefbd522e47a958fa447bad7ca89017a_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{1}{T}\int_0^T\sin^2\omega t\,dt=\frac{1}{2}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-018adde0f028f8b75c3411d6ecbe195b_l3.svg "Rendered by QuickLaTeX.com")
![\[\frac{1}{T}\int_0^T\sin\omega t\cos\omega t\,dt=0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-25a8d7e20f0d9a7a81d792be8d7be66d_l3.svg "Rendered by QuickLaTeX.com")

 is known as the
is known as the  so the average power dissipated is
so the average power dissipated is![\[P_{\mathrm{ave}}=\frac{1}{2}I_0V_0\cos\phi.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ce27b2210c78b2048333104609273b4b_l3.svg "Rendered by QuickLaTeX.com")
 is shown in ??(d). To make
is shown in ??(d). To make  look like its dc counterpart, we use the rms values
look like its dc counterpart, we use the rms values  of the current and the voltage. By definition, these are
of the current and the voltage. By definition, these are![\[I_{\mathrm{rms}}=\sqrt{{i_{\mathrm{ave}}}^2~~\mathrm{and}~~V_{\mathrm{rms}}=\sqrt{{v_{\mathrm{ave}}}^2}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-0394c17f9213f4d8364dd59245747921_l3.svg "Rendered by QuickLaTeX.com")
![\[{i_{\mathrm{ave}}}^2=\frac{1}{T}\int_0^Ti^2(t)dt~~\mathrm{and}~~{v_{\mathrm{ave}}}^2=\frac{1}{T}\int_0^Tv^2(t)dt.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-76ca23624bf78cec02eb23af2d50feab_l3.svg "Rendered by QuickLaTeX.com")
 and
and ![\[I_{\mathrm{rms}}=\frac{1}{\sqrt{2}}I_0~~\mathrm{and}~~V_{\mathrm{rms}}=\frac{1}{\sqrt{2}}V_0.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e5d99ee5f782738fbab40379628a4f3a_l3.svg "Rendered by QuickLaTeX.com")

 is not necessary.
is not necessary. Because most ac meters are calibrated in terms of rms values, a typical ac voltmeter placed across a household outlet will read
Because most ac meters are calibrated in terms of rms values, a typical ac voltmeter placed across a household outlet will read 
 and
and  respectively. Since
respectively. Since  we find from Equation
we find from Equation  the generator produces power; if
the generator produces power; if  it absorbs power. In terms of rms values, the average power of an ac generator is written as
it absorbs power. In terms of rms values, the average power of an ac generator is written as![\[P_{\mathrm{ave}}=I_{\mathrm{rms}}V_{\mathrm{rms}}\cos\phi.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d8c98ef0f48cdc817b40d2e137f78ef9_l3.svg "Rendered by QuickLaTeX.com")
![\[\tan\phi=\frac{X_L-X_C}{R}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-daaca51dc2f91cc5e492420561cc770b_l3.svg "Rendered by QuickLaTeX.com")
![\[\cos\phi=\frac{R}{\sqrt{R^2+(X_L-X_C)^2}}=\frac{R}{Z}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7329c0aa5a5e7eea1462dc5936ae3f9f_l3.svg "Rendered by QuickLaTeX.com")

![\[P_{\mathrm{ave}}={I_{\mathrm{rms}}}^2R,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a2f46bce8db68a96c0867803c483f636_l3.svg "Rendered by QuickLaTeX.com")
![\[v(t)=(4.00~\mathrm{V})\sin[(1.00\times10^4~\mathrm{rad/s})t]\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-902e86fbdbb4432eb5aa59145bf55259_l3.svg "Rendered by QuickLaTeX.com")

 and
and  (a) What is the rms voltage across the generator? (b) What is the impedance of the circuit? (c) What is the average power output of the generator?
(a) What is the rms voltage across the generator? (b) What is the impedance of the circuit? (c) What is the average power output of the generator? The impedance of the circuit involves the resistance and the reactances of the capacitor and the inductor. The average power is calculated by Equation
The impedance of the circuit involves the resistance and the reactances of the capacitor and the inductor. The average power is calculated by Equation  the rms voltage
the rms voltage  and the resistance
and the resistance  the rms voltage across the generator is
the rms voltage across the generator is![\[V_{\mathrm{rms}}=\frac{1}{\sqrt{2}}(4.00~\mathrm{V})=2.83~\mathrm{V}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-de73093e2b469d80ac30a5cdbb241970_l3.svg "Rendered by QuickLaTeX.com")
![\begin{eqnarray*}Z&\!\!\!=\!\!\!&\sqrt{R^2+(X_L-X_C)^2}\\&\!\!\!=\!\!\!&\left((5.00~\Omega)^2+\left[(10^4~\mathrm{rad/s})(2.00~\mathrm{mH})-\frac{1}{(10^4~\mathrm{rad/s})(4.00~\mu\mathrm{F})}\right]^2\right)^{1/2}\\&\!\!\!=\!\!\!&7.07~\Omega.\end{eqnarray*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-4a2f8429a05ab058bb71da840455de04_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{ave}}=\frac{{V_{\mathrm{rms}}}^2R}{Z^2}=\frac{(2.83~\mathrm{V})^2(5.00~\Omega)}{(7.07~\Omega)^2}=0.801~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bf255268dca8b435e1f48627217e2c39_l3.svg "Rendered by QuickLaTeX.com")
 where
where  ac generator reads
ac generator reads  Write an expression for the emf of the generator.
Write an expression for the emf of the generator.
 and
and  respectively. Determine these values for the components of the
respectively. Determine these values for the components of the 

 the current amplitude is at its maximum value.
the current amplitude is at its maximum value.
![\[L\frac{d^2q}{dt^2}+R\frac{dq}{dt}+\frac{1}{C}q=V_0\sin\omega t,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c18a3565ffdb8504891eeec4f285c121_l3.svg "Rendered by QuickLaTeX.com")
 for
for  Equation
Equation  of the
of the  at which the impedance
at which the impedance  in Equation
in Equation ![\[\omega_0L=\frac{1}{\omega_0C}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-52bbf4cb05705cb6333d7d5cc6cc3a5a_l3.svg "Rendered by QuickLaTeX.com")

![\[\phi=\tan^{-1}(0)=0,~~~~~I_0=V_0/R,~~~~~\mathrm{and}~~~~~Z=R.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-16438154287c89714381ee7377531e53_l3.svg "Rendered by QuickLaTeX.com")
 and
and  Thus, at resonance, the average power output of the source in an
Thus, at resonance, the average power output of the source in an 
 of the resonance peak is defined as the range of angular frequencies
of the resonance peak is defined as the range of angular frequencies  The sharpness of the peak is described by a dimensionless quantity known as the
The sharpness of the peak is described by a dimensionless quantity known as the 
 is the resonant angular frequency. A high
is the resonant angular frequency. A high 

 that are tuned by an inductor-capacitor circuit. One of the most common applications of capacitors is their use in ac-timing circuits, based on attaining a resonant frequency. A metal detector also uses a shift in resonance frequency in detecting metals (
that are tuned by an inductor-capacitor circuit. One of the most common applications of capacitors is their use in ac-timing circuits, based on attaining a resonant frequency. A metal detector also uses a shift in resonance frequency in detecting metals (

![\[I_0=\frac{0.100~\mathrm{V}}{4.00~\Omega}=2.50\times10^{-2}~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-16fdfd0b0491346d0f4bc7b864f3f888_l3.svg "Rendered by QuickLaTeX.com")

 and
and  ? (b) If an ac source of constant amplitude
? (b) If an ac source of constant amplitude  is set to this frequency, what is the average power transferred to the circuit? (c) Determine
is set to this frequency, what is the average power transferred to the circuit? (c) Determine 
![\[P_{\mathrm{ave}}=\frac{{V_{\mathrm{ave}}}^2}{R}=\frac{[(1/\sqrt{2})(4.00~\mathrm{V})]^2}{0.200~\Omega}=40.0~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c1bcc2f35a86a0c23a4de6a7e7ebf016_l3.svg "Rendered by QuickLaTeX.com")
![\[Q=\frac{\omega_0L}{R}=\frac{(1.12\times10^4~\mathrm{rad/s})(4.00\times10^{-3}~\mathrm{H})}{0.200~\Omega}=224.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-66a280dcb494df1dc154ee53cc190e02_l3.svg "Rendered by QuickLaTeX.com")
![\[\Delta\omega=\frac{\omega_0}{Q}=\frac{1.12\times10^4~\mathrm{rad/s}}{224}=50.0~\mathrm{rad/s}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ef7493ce47521361f1c4fa3bfea236ae_l3.svg "Rendered by QuickLaTeX.com")

 and
and  (a) What is the resonant frequency? (b) What is the impedance of the circuit at resonance? (c) If the voltage amplitude is
(a) What is the resonant frequency? (b) What is the impedance of the circuit at resonance? (c) If the voltage amplitude is  what is
what is  Calculate the phase difference between the current and the emf of the generator.
Calculate the phase difference between the current and the emf of the generator. An ac source operating at this frequency transfers an average power of
An ac source operating at this frequency transfers an average power of  to the circuit. The resistance of the circuit is
to the circuit. The resistance of the circuit is  Write an expression for the emf of the source.
Write an expression for the emf of the source. ). The same power can be transmitted at different voltages because power is the product
). The same power can be transmitted at different voltages because power is the product  (For simplicity, we ignore the phase factor
(For simplicity, we ignore the phase factor  ) A particular power requirement can therefore be met with a low voltage and a high current or with a high voltage and a low current. The advantage of the high-voltage/low-current choice is that it results in lower
) A particular power requirement can therefore be met with a low voltage and a high current or with a high voltage and a low current. The advantage of the high-voltage/low-current choice is that it results in lower  ohmic losses in the transmission lines, which can be significant in lines that are many kilometres long (
ohmic losses in the transmission lines, which can be significant in lines that are many kilometres long (
 to
to  so that it can be safely introduced into a home. A high-voltage transmission line allows a low current to be transmitted via a substation over long distances.
so that it can be safely introduced into a home. A high-voltage transmission line allows a low current to be transmitted via a substation over long distances. or
or 
 loops, or turns, and is connected to an alternating voltage
loops, or turns, and is connected to an alternating voltage  The secondary winding has
The secondary winding has  turns and is connected to a load resistor
turns and is connected to a load resistor  We assume the ideal case for which all magnetic field lines are confined to the core so that the same magnetic flux permeates each turn of both the primary and the secondary windings. We also neglect energy losses to magnetic hysteresis, to ohmic heating in the windings, and to ohmic heating of the induced eddy currents in the core. A good transformer can have losses as low as
We assume the ideal case for which all magnetic field lines are confined to the core so that the same magnetic flux permeates each turn of both the primary and the secondary windings. We also neglect energy losses to magnetic hysteresis, to ohmic heating in the windings, and to ohmic heating of the induced eddy currents in the core. A good transformer can have losses as low as  of the transmitted power, so this is not a bad assumption.
of the transmitted power, so this is not a bad assumption.
 is equal to the potential difference induced across the primary winding. From Faraday’s law, the induced potential difference is
is equal to the potential difference induced across the primary winding. From Faraday’s law, the induced potential difference is  where
where ![\[v_P(t)=-N_P\frac{d\Phi}{dt}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bbd8c595ca3f1a77e8df7165ad6a1aea_l3.svg "Rendered by QuickLaTeX.com")


![\[v_S(t)=-N_S\frac{d\Phi}{dt}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ce2265f851b1c44e45cdede7dd1cace9_l3.svg "Rendered by QuickLaTeX.com")

 the input voltage
the input voltage  or “stepped down”
or “stepped down”  to
to  the output voltage. This is often abbreviated as the
the output voltage. This is often abbreviated as the 
![\[i_P(t)v_P(t)=i_S(t)v_S(t).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-22c53200f9e11c11c30060bcdca84aa1_l3.svg "Rendered by QuickLaTeX.com")

 along with Equation
along with Equation ![\[v_P(t)=i_P\left[\left(\frac{N_P}{N_S}\right)^2R_S\right],\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6cb6223dd448e560782eb7ef6ba5474f_l3.svg "Rendered by QuickLaTeX.com")
 but rather a resistance
but rather a resistance![\[R_P=\left(\frac{N_P}{N_S}\right)^2R_S.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1eb3b3c471b5cf769e81f1e9b8d2101e_l3.svg "Rendered by QuickLaTeX.com")
 (a) What is the ratio of the number of secondary turns to the number of primary turns? (b) If the input current to the transformer is
(a) What is the ratio of the number of secondary turns to the number of primary turns? (b) If the input current to the transformer is  (d) What would the power loss have been if the transmission line was at
(d) What would the power loss have been if the transmission line was at  we have
we have![\[\frac{N_S}{N_P}=\frac{240~\mathrm{V}}{12\times10^3~\mathrm{V}}=\frac{1}{50},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2b53053e50d8cc093979e8d4b5f6ac24_l3.svg "Rendered by QuickLaTeX.com")
 is found using the transformer equation with current
is found using the transformer equation with current
![\[I_S=\frac{N_P}{N_S}I_P=(50)(2.0~\mathrm{A})=100~\mathrm{A}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-918b63c22b1b4c8dd7193b3f06fe0717_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{loss}}{I_P}^2R=(2.0~\mathrm{A})^2(200~\Omega)=800~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-053ec0f4489b6a0bd014d361ec61186e_l3.svg "Rendered by QuickLaTeX.com")
![\[P_{\mathrm{loss}}={I_S}^2R=(100~\mathrm{A})^2(200~\Omega)=2\times10^6~\mathrm{W}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-bee3c055ee38358169f639facb9262ee_l3.svg "Rendered by QuickLaTeX.com")
 so that a current of
so that a current of  source?
source?















 to
to 
 ,
,  ; b.
; b.  ; c.
; c. 
 ;
;  ;
; 

 ;
; 
 ; b.
; b.  ; d.
; d. 

 ; b.
; b.  ; c.
; c. 
 capacitor at (a)
capacitor at (a)  (b)
(b)  and (c)
and (c) 
 capacitor equal to that of a
capacitor equal to that of a  inductor?
inductor? the reactance of a
the reactance of a  resistor is connected across the emf
resistor is connected across the emf  Write an expression for the current through the resistor.
Write an expression for the current through the resistor. capacitor is connected to an emf given by
capacitor is connected to an emf given by  (a) What is the reactance of the capacitor? (b) Write an expression for the current output of the source.
(a) What is the reactance of the capacitor? (b) Write an expression for the current output of the source. inductor is connected across the emf of the preceding problem. (a) What is the reactance of the inductor? (b) Write an expression for the current through the inductor.
inductor is connected across the emf of the preceding problem. (a) What is the reactance of the inductor? (b) Write an expression for the current through the inductor. ?
? where
where 
 and
and  (a) What is the impedance of the circuit? (b) What is the amplitude of the current through the resistor? (c) Write an expression for the current through the resistor. (d) Write expressions representing the voltages across the resistor and across the capacitor.
(a) What is the impedance of the circuit? (b) What is the amplitude of the current through the resistor? (c) Write an expression for the current through the resistor. (d) Write expressions representing the voltages across the resistor and across the capacitor. and
and  ; also,
; also,  and
and  (a) What is the impedance of the circuit? (b) What is the amplitude of the current through the resistor? (c) Write an expression for the current through the resistor. (d) Write expressions representing the voltages across the resistor and across the inductor.
(a) What is the impedance of the circuit? (b) What is the amplitude of the current through the resistor? (c) Write an expression for the current through the resistor. (d) Write expressions representing the voltages across the resistor and across the inductor. respectively, an
respectively, an 
 and
and  (a) What is the impedance of the circuit? (b) What is the amplitude of the current from the source? (c) If the emf of the source is given by
(a) What is the impedance of the circuit? (b) What is the amplitude of the current from the source? (c) If the emf of the source is given by  how does the current vary with time? (d) Repeat the calculations with
how does the current vary with time? (d) Repeat the calculations with 

 and
and  is driven by an ac source whose frequency and voltage amplitude are
is driven by an ac source whose frequency and voltage amplitude are  and
and  and
and  Calculate the average power output of the source if it is connected across (a) a
Calculate the average power output of the source if it is connected across (a) a  inductor, and (c) a
inductor, and (c) a  when connected across (a) a
when connected across (a) a  inductor is connected to a
inductor is connected to a  AC source whose voltage amplitude is
AC source whose voltage amplitude is  If an AC voltmeter is placed across the inductor, what does it read?
If an AC voltmeter is placed across the inductor, what does it read? ; and
; and  Find the average power dissipated in the resistor for the following values for the capacitance: (a)
Find the average power dissipated in the resistor for the following values for the capacitance: (a)  and (b)
and (b)  when its current output is
when its current output is  What is the phase angle
What is the phase angle  and a power factor of
and a power factor of  with the voltage lagging the current. (a) Should a capacitor or an inductor be placed in series with the elements to raise the power factor of the circuit? (b) What is the value of the capacitance or self-inductance that will raise the power factor to unity?
with the voltage lagging the current. (a) Should a capacitor or an inductor be placed in series with the elements to raise the power factor of the circuit? (b) What is the value of the capacitance or self-inductance that will raise the power factor to unity?
 and
and  If the self-inductance in the circuit is
If the self-inductance in the circuit is  what is the capacitance in the circuit?
what is the capacitance in the circuit? and
and  ? (b) What is the impedance of the circuit at resonance?
? (b) What is the impedance of the circuit at resonance? and
and  (a) If an ac source of variable frequency is connected to the circuit, at what frequency is maximum power dissipated in the resistor? (b) What is the quality factor of the circuit?
(a) If an ac source of variable frequency is connected to the circuit, at what frequency is maximum power dissipated in the resistor? (b) What is the quality factor of the circuit?
 (a) Plot the current through the resistor as a function of the frequency
(a) Plot the current through the resistor as a function of the frequency  and
and  ? (b) If this combination is connected to a
? (b) If this combination is connected to a  and a resistance of
and a resistance of  and a
and a  (rms) when the primary winding is connected to a
(rms) when the primary winding is connected to a  in the primary winding, how many turns are there in the secondary winding? (b) If a resistor connected across the secondary winding draws an rms current of
in the primary winding, how many turns are there in the secondary winding? (b) If a resistor connected across the secondary winding draws an rms current of  what is the current in the primary winding?
what is the current in the primary winding? (rms). The tube dissipates
(rms). The tube dissipates  of power. (a) What is the ratio of the number of turns in the secondary winding to the number of turns in the primary winding? (b) What are the rms currents in the primary and secondary windings? (c) What is the effective resistance seen by the
of power. (a) What is the ratio of the number of turns in the secondary winding to the number of turns in the primary winding? (b) What are the rms currents in the primary and secondary windings? (c) What is the effective resistance seen by the  of power at an rms current of
of power at an rms current of  (a) What are the voltage across the primary coil and the current through the secondary coil? (b) What is the ratio of secondary to primary turns for the transformer?
(a) What are the voltage across the primary coil and the current through the secondary coil? (b) What is the ratio of secondary to primary turns for the transformer? how many turns does the secondary winding have? (b) If the radio operates at a current of
how many turns does the secondary winding have? (b) If the radio operates at a current of  what is the current through the primary winding?
what is the current through the primary winding? resistor.
resistor. capacitor is connected across an ac source with a voltage amplitude of
capacitor is connected across an ac source with a voltage amplitude of  and a frequency of
and a frequency of  (a) Determine the capacitive reactance of the capacitor and the amplitude of the output current of the source. (b) If the frequency is changed to
(a) Determine the capacitive reactance of the capacitor and the amplitude of the output current of the source. (b) If the frequency is changed to  what are the capacitive reactance and the current amplitude?
what are the capacitive reactance and the current amplitude? (a) Determine the reactance of the circuit and the maximum current through the inductor when the frequency is set at
(a) Determine the reactance of the circuit and the maximum current through the inductor when the frequency is set at 
 capacitor is connected across a
capacitor is connected across a  inductor is connected across a
inductor is connected across a  ?
? drives an
drives an  (a) Determine the rms current through the circuit. (b) What are the rms voltages across the three elements? (c) What is the phase angle between the emf and the current? (d) What is the power output of the source? (e) What is the power dissipated in the resistor?
(a) Determine the rms current through the circuit. (b) What are the rms voltages across the three elements? (c) What is the phase angle between the emf and the current? (d) What is the power output of the source? (e) What is the power dissipated in the resistor?


 What is the power output of the source?
What is the power output of the source? (rms). A transformer is used to step up the transmission line voltage to
(rms). A transformer is used to step up the transmission line voltage to  what is the power loss per meter in the line? (c) What would the power loss per meter be if the line voltage were
what is the power loss per meter in the line? (c) What would the power loss per meter be if the line voltage were  outside a town delivering
outside a town delivering  of power to the town. The transmission lines are made of aluminum cables with a
of power to the town. The transmission lines are made of aluminum cables with a  cross-sectional area. Find the loss of power in the transmission lines if it is transmitted at (a)
cross-sectional area. Find the loss of power in the transmission lines if it is transmitted at (a)  (rms) and (b)
(rms) and (b)  for their operation. A transformer is to be used to change the voltage from
for their operation. A transformer is to be used to change the voltage from  (rms) ac to
(rms) ac to  ? (c) How much power is used by the neon sign when it is drawing the maximum current allowed by the fuse in the primary winding?
? (c) How much power is used by the neon sign when it is drawing the maximum current allowed by the fuse in the primary winding? ac electricity from a power transmission line is fed into the primary winding of a transformer. The ratio of the number of turns in the secondary winding to the number in the primary winding is
ac electricity from a power transmission line is fed into the primary winding of a transformer. The ratio of the number of turns in the secondary winding to the number in the primary winding is  (a) What voltage is induced in the secondary winding? (b) What is unreasonable about this result? (c) Which assumption or premise is responsible?
(a) What voltage is induced in the secondary winding? (b) What is unreasonable about this result? (c) Which assumption or premise is responsible? resistor and
resistor and  inductor are connected in series, as shown below, across a
inductor are connected in series, as shown below, across a  capacitor, and
capacitor, and  (a) What is the impedance of the circuit? (b) What is the amplitude of the current in the circuit? (c) What is the phase constant of the current? Is it leading or lagging the source voltage? (d) Write voltage drops across the resistor, capacitor, and inductor and the source voltage as a function of time. (e) What is the power factor of the circuit? (f) How much energy is used by the resistor in
(a) What is the impedance of the circuit? (b) What is the amplitude of the current in the circuit? (c) What is the phase constant of the current? Is it leading or lagging the source voltage? (d) Write voltage drops across the resistor, capacitor, and inductor and the source voltage as a function of time. (e) What is the power factor of the circuit? (f) How much energy is used by the resistor in  ?
? capacitor, and
capacitor, and  inductor are connected in series with an ac source of amplitude
inductor are connected in series with an ac source of amplitude  ? (b) What is the amplitude of the current if
? (b) What is the amplitude of the current if  ? (c) What is the phase constant of the current when
? (c) What is the phase constant of the current when  (e) What is the power factor of the circuit when
(e) What is the power factor of the circuit when  inductor with a frequency
inductor with a frequency  of the ac circuit; (c)
of the ac circuit; (c)  of the ac circuit; (d)
of the ac circuit; (d)  capacitor with a frequency
capacitor with a frequency  and has a mismatch with a low-impedance
and has a mismatch with a low-impedance  loudspeaker. You are asked to insert an appropriate transformer to match the impedances. What turns ratio will you use, and why? Use the simplified circuit shown below.
loudspeaker. You are asked to insert an appropriate transformer to match the impedances. What turns ratio will you use, and why? Use the simplified circuit shown below. and a resistance of
and a resistance of  is connected to an ac source whose frequency can be varied. At what frequency will the voltage across the coil lead the current through the coil by
is connected to an ac source whose frequency can be varied. At what frequency will the voltage across the coil lead the current through the coil by  capacitor, and a
capacitor, and a  inductor whose coil has a resistance of
inductor whose coil has a resistance of  The source for the circuit has an rms emf of
The source for the circuit has an rms emf of  capacitor, and a
capacitor, and a  inductor. A
inductor. A  and the output voltage is
and the output voltage is  (a) Show that for the capacitor circuit,
(a) Show that for the capacitor circuit,  and for the inductor circuit,
and for the inductor circuit,  (b) Show that for high frequencies,
(b) Show that for high frequencies,  but for low frequencies,
but for low frequencies, 


 Surface
Surface ![\[\oint_C\vec{\mathbf{B}}\cdot d\vec{\mathbf{s}}=\left\{\begin{array}{lc}\mu_0I&\mathrm{if~surface~}S_1~\mathrm{is~used}\\0&\mathrm{if~surface~}S_2~\mathrm{is~used}\end{array}\right..\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6a5fa7f9ad01d455a7a5de4e66dd68bc_l3.svg "Rendered by QuickLaTeX.com")

 to the real current
to the real current 

 is the
is the ![\[\Phi_{\mathrm{E}}=\iint_{\mathrm{Surface}~S}\vec{\mathbf{E}}\cdot d\vec{\mathbf{A}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ad22a3bffebfee5f7c309dee11e9e34f_l3.svg "Rendered by QuickLaTeX.com")

 corresponding to the flux
corresponding to the flux 
 through which no actual current flows, the displacement current leads to the same value
through which no actual current flows, the displacement current leads to the same value ![\begin{equation*}\oint_C\vec{\mathbf{B}}\cdot d\vec{\mathbf{s}}=\mu_0\frac{d}{dt}\left[\epsilon_0\iint_{\mathrm{Surface}~S_2}\vec{\mathbf{E}}\cdot d\vec{\mathbf{A}}\right].\end{equation*}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-5a76e68c94cc2cdd442440c82ca1eb72_l3.svg "Rendered by QuickLaTeX.com")
 the flux contribution through
the flux contribution through 
 and apply Gauss’s law to obtain
and apply Gauss’s law to obtain
 (b) From the properties of the capacitor, find the corresponding real current
(b) From the properties of the capacitor, find the corresponding real current ![\[V_C=\frac{1}{C}Q(t)=V_0\left(1-e^{-t/RC}\right).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-55c959bb1c46c175e1da6026da975177_l3.svg "Rendered by QuickLaTeX.com")
![\[E_z(t)=\frac{V_0}{d}\left(1-e^{-t/RC}\right).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8960d1b97b2525d87c6ffa9da7cb7d57_l3.svg "Rendered by QuickLaTeX.com")
 between the plates is
between the plates is![\[I_{\mathrm{d}}=\epsilon_0A\frac{\partial E_z(t)}{\partial t}=\epsilon_0A\frac{V_0}{d}\times\frac{1}{RC}e^{-t/RC}=\frac{V_0}{R}e^{-t/RC},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-160b22fa496a41ba8ae2d673eee3628d_l3.svg "Rendered by QuickLaTeX.com")
 the charge on the capacitor is
the charge on the capacitor is![\[Q(t)=CV_C=CV_0\left(1-e^{-t/RC}\right).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-228d9d45602ae365b3229ffe660c0607_l3.svg "Rendered by QuickLaTeX.com")
![\[I=\frac{dQ}{dt}=\frac{V_0}{R}e^{-t/RC}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6cf7afc532c549bd9a5ae57bc5140176_l3.svg "Rendered by QuickLaTeX.com")





 enclosed by the surface. Gauss’s law [Equation
enclosed by the surface. Gauss’s law [Equation  produced by the high-frequency alternating current seen in
produced by the high-frequency alternating current seen in  at the boundary of that surface. The displacement current source for the electric field, like the Faraday’s law source for the magnetic field, produces only closed loops of field lines, because of the mathematical symmetry involved in the equations for the induced electric and induced magnetic fields. A field line representation of
at the boundary of that surface. The displacement current source for the electric field, like the Faraday’s law source for the magnetic field, produces only closed loops of field lines, because of the mathematical symmetry involved in the equations for the induced electric and induced magnetic fields. A field line representation of  according to the modified Ampère’s law. This changing field induces
according to the modified Ampère’s law. This changing field induces  which induces
which induces  and so on. We then have a self-continuing process that leads to the creation of time-varying electric and magnetic fields in regions farther and farther away from
and so on. We then have a self-continuing process that leads to the creation of time-varying electric and magnetic fields in regions farther and farther away from  This process may be visualized as the propagation of an electromagnetic wave through space.
This process may be visualized as the propagation of an electromagnetic wave through space.
 and connected it to a loop of wire, as shown in
and connected it to a loop of wire, as shown in 
 where
where  ), is named in his honour.
), is named in his honour. the
the  etc. Because we are assuming free space, there are no free charges or currents, so we can set
etc. Because we are assuming free space, there are no free charges or currents, so we can set  and
and  in Maxwell’s equations.
in Maxwell’s equations. as shown in
as shown in  is constant over the face of the box with area
is constant over the face of the box with area  that is constant over the opposite face of the box. Applying Gauss’s law gives
that is constant over the opposite face of the box. Applying Gauss’s law gives
 is the area of the front and back faces of the rectangular surface. But the charge enclosed is
is the area of the front and back faces of the rectangular surface. But the charge enclosed is  so this component’s net flux is also zero, and Equation
so this component’s net flux is also zero, and Equation  for any
for any  Therefore, if there is an
Therefore, if there is an  for this wave. Therefore, the only nonzero components of the electric field are
for this wave. Therefore, the only nonzero components of the electric field are  and
and  perpendicular to the direction of propagation of the wave.
perpendicular to the direction of propagation of the wave.
 is our Gaussian surface. The electric field shown is from an electromagnetic wave propagating along the
is our Gaussian surface. The electric field shown is from an electromagnetic wave propagating along the  we have
we have![\[\oint\vec{\mathbf{E}}\cdot d\vec{\mathbf{s}}=-E_y(x,t)l+E_y(x+\Delta x,t)l.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f41bf13422e9a5651c7fe17e8fd2235a_l3.svg "Rendered by QuickLaTeX.com")
 is small and approximating
is small and approximating  by
by![\[E_y(x+\Delta x,t)=E_y(x,t)+\frac{\partial E_y(x,t)}{\partial x}\Delta x,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b361a2d86f4d6b7db1de037a8a77028d_l3.svg "Rendered by QuickLaTeX.com")
![\[\oint\vec{\mathbf{E}}\cdot d\vec{\mathbf{s}}=\frac{\partial E_y(x,t)}{\partial x}(l\Delta x).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9000d72598104f1f64685002b04bd481_l3.svg "Rendered by QuickLaTeX.com")

 along the rectangular edge of Side 3 in the direction indicated, taking the
along the rectangular edge of Side 3 in the direction indicated, taking the  The flux of the
The flux of the 

.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d25fc0ab45dafccaa368de65a996ba86_l3.svg "Rendered by QuickLaTeX.com")
 and taking the limit as
and taking the limit as  we are left with
we are left with

![\[\oint\vec{\mathbf{B}}\cdot d\vec{\mathbf{s}}=\mu_0\epsilon_0\frac{d}{dt}\int_S\vec{\mathbf{E}}\cdot\hat{\mathbf{n}}da\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c64f25ef1cd2f0f4314aaae9412161cf_l3.svg "Rendered by QuickLaTeX.com")


![\[\frac{\partial^2E_y}{\partial x^2}=\frac{\partial}{\partial x}\left(\frac{\partial E_y}{\partial x}\right)=-\frac{\partial}{\partial x}\left(\frac{\partial B_z}{\partial t}\right)=-\frac{\partial}{\partial t}\left(\frac{\partial B_z}{\partial x}\right)=\frac{\partial}{\partial t}\left(\epsilon_0\mu_0\frac{\partial E_y}{\partial t}\right)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6ca458929bb89beee574b8b057e39659_l3.svg "Rendered by QuickLaTeX.com")

 we can assume the field components are each functions of
we can assume the field components are each functions of  for the wave traveling in the
for the wave traveling in the 
![\[1=\epsilon_0\mu_0c^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f4ae3f281f00f31ad2ff62e516496333_l3.svg "Rendered by QuickLaTeX.com")

 and
and  The same type of analysis with Equation
The same type of analysis with Equation 
 we find that
we find that![\[c=\frac{1}{\sqrt{\left(8.85\times10^{-12}~\frac{\mathrm{C}^2}{\mathrm{N}\cdot\mathrm{m}^2}\right)\left(4\pi\times10^{-7}~\frac{\mathrm{T}\cdot\mathrm{m}}{\mathrm{A}}\right)}}=3.00\times10^8~\mathrm{m/s},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-384ac8d29e6022846f23b6fcf5993336_l3.svg "Rendered by QuickLaTeX.com")
 We next show what Maxwell’s equations imply about the ratio of the
We next show what Maxwell’s equations imply about the ratio of the 
 and
and  and similarly, the
and similarly, the  and
and  The amplitude of the wave is the maximum value of
The amplitude of the wave is the maximum value of  The period of oscillation
The period of oscillation  The wavelength
The wavelength ![\[\omega=2\pi f,~~~~~f=\frac{1}{T},~~~~~k=\frac{2\pi}{\lambda},~~~~~\mathrm{and}~~~~~c=f\lambda=\omega/k.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-54e585d2b05def98435dced2aff1533a_l3.svg "Rendered by QuickLaTeX.com")
 has the form shown in Equation
has the form shown in Equation  must obey
must obey
 Thus, we conclude from Equation
Thus, we conclude from Equation ![\[B_z(x,t)=\frac{k}{\omega}E_0\cos(kx-\omega t)=\frac{1}{c}E_0\cos(kx-\omega t).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-56fc2bac2e73971a91819c006f10be5c_l3.svg "Rendered by QuickLaTeX.com")



 ?
?![\[B=\frac{E}{c}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ab6e8fb494995d9be843485b9243f157_l3.svg "Rendered by QuickLaTeX.com")
 and
and ![\[B=\frac{1000~\mathrm{V/m}}{3.00\times10^8~\mathrm{m/s}}=3.33\times10^{-6}~\mathrm{T}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-58e87f4c060c6f077f6a65595dde7a4b_l3.svg "Rendered by QuickLaTeX.com")


 and the energy flux
and the energy flux 
![\[E_y(x,t)=E_0\cos(kx-\omega t)\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-351dd1fa1fdfe5432aa3679309b47bb4_l3.svg "Rendered by QuickLaTeX.com")
![\[B_z(x,t)=B_0\cos(kx-\omega t).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-6016e83078201884203c8258d94058f1_l3.svg "Rendered by QuickLaTeX.com")
 is the sum of the energy density from the electric field and the energy density from the magnetic field. Expressions for both field energy densities were discussed earlier (
is the sum of the energy density from the electric field and the energy density from the magnetic field. Expressions for both field energy densities were discussed earlier ( in
in ![\[u(x,t)=u_E+u_B=\frac{1}{2}\epsilon_0E^2+\frac{1}{2\mu_0}B^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-85add944c800e9f60d97a71afcf017ce_l3.svg "Rendered by QuickLaTeX.com")
 then shows that the magnetic energy density
then shows that the magnetic energy density 
 and cross-sectional area
and cross-sectional area 
 contained in the electric and magnetic fields of the electromagnetic wave in the volume
contained in the electric and magnetic fields of the electromagnetic wave in the volume  passes through the area
passes through the area ![\[u\times\mathrm{volume}=uAc\Delta t.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-fbe1ce24866fb8db72a84764332fd678_l3.svg "Rendered by QuickLaTeX.com")
![\[S=\frac{\mathrm{Energy~passing~area}~A~\mathrm{in time}~\Delta t}{A\Delta t}=uc=\epsilon_0cE^2=\frac{1}{\mu_0}EB.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-7d64512baeea067a83de52814dc39297_l3.svg "Rendered by QuickLaTeX.com")
 , called the
, called the 
 The electric field is decreasing with increasing
The electric field is decreasing with increasing  is specifically in the direction of propagation of the electromagnetic wave.
is specifically in the direction of propagation of the electromagnetic wave.
 the energy flux for visible light through any area is an extremely rapidly varying quantity. Most measuring devices, including our eyes, detect only an average over many cycles. The time average of the energy flux is the
the energy flux for visible light through any area is an extremely rapidly varying quantity. Most measuring devices, including our eyes, detect only an average over many cycles. The time average of the energy flux is the 
 is the same as for
is the same as for  to obtain
to obtain![\[\langle\cos^2\xi\rangle=\frac{1}{2}\left[\langle\cos^2\xi\rangle+\langle\sin^2\xi\rangle\right]\frac{1}{2}\langle1\rangle=\frac{1}{2}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-e7446cf488d546ac6c4db59e606ab9c6_l3.svg "Rendered by QuickLaTeX.com")
 stand for the time-averaging operation. The intensity of light moving at speed
stand for the time-averaging operation. The intensity of light moving at speed 
 which is also the electric field amplitude. Algebraic manipulation produces the relationship
which is also the electric field amplitude. Algebraic manipulation produces the relationship
 in terms of both electric and magnetic field strengths is useful. Substituting the fact that
in terms of both electric and magnetic field strengths is useful. Substituting the fact that  the previous expression becomes
the previous expression becomes

 Assuming that the beam is composed of plane waves, calculate the amplitudes of the electric and magnetic fields in the beam.
Assuming that the beam is composed of plane waves, calculate the amplitudes of the electric and magnetic fields in the beam.![\[I=\frac{1}{2}c\epsilon_0E_0^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9e62efc1aac13e7364f0f2b47f08812c_l3.svg "Rendered by QuickLaTeX.com")

![\[B_0=\frac{E_0}{c}=2.9\times10^{-9}~\mathrm{T}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8530eacaa85ad56d36062af40904ac1c_l3.svg "Rendered by QuickLaTeX.com")
 of power as visible light. What are the average electric and magnetic fields from the light at a distance of
of power as visible light. What are the average electric and magnetic fields from the light at a distance of  ?
?![\[I=\frac{P}{4\pi r^2}=\frac{c\epsilon_0E_0^2}{2},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ff1c6d77beafc8e954d5277ad3540740_l3.svg "Rendered by QuickLaTeX.com")

![\[B_0=E_0/c=1.92\times10^{-8}~\mathrm{T}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-127fc13f62b0985f591bc3dfb6ef2024_l3.svg "Rendered by QuickLaTeX.com")
 radio transmitter on Earth sends its signal to a satellite
radio transmitter on Earth sends its signal to a satellite  away (
away ( ?
?
 ) and change the area by the same factor to keep
) and change the area by the same factor to keep  the same. Then use the proportion of area
the same. Then use the proportion of area ![\[\frac{r_2^2}{r_1^2}=\frac{A_2}{A_1}=\frac{90~\mathrm{W}}{60~\mathrm{W}},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-31315dd55703adffff0ed07446b1bcf1_l3.svg "Rendered by QuickLaTeX.com")
![\[r_2=\sqrt{\frac{90}{60}}(100~\mathrm{km})=122~\mathrm{km}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-f02a96468d252e6ed9fde56099e3822f_l3.svg "Rendered by QuickLaTeX.com")


 applied by an electromagnetic wave on a perfectly absorbing surface turns out to be equal to the energy density of the wave:
applied by an electromagnetic wave on a perfectly absorbing surface turns out to be equal to the energy density of the wave:

![\[[u]=\frac{\mathrm{J}}{\mathrm{m}^3}=\frac{\mathrm{N}\cdot\mathrm{m}}{\mathrm{m}^3}=\frac{\mathrm{N}}{\mathrm{m}^2}=\mathrm{units~of~pressure.}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cae1ba663dab05affcb72c836f4c91d9_l3.svg "Rendered by QuickLaTeX.com")


 from the centre of the Sun. The average power output of the Sun is
from the centre of the Sun. The average power output of the Sun is 
 breaks loose from the comet. Calculate the force on this chunk due to the solar radiation. Compare this force with the gravitational force of the Sun.
breaks loose from the comet. Calculate the force on this chunk due to the solar radiation. Compare this force with the gravitational force of the Sun.![\[I=S_{\mathrm{avg}}\frac{3.8\times10^{26}~\mathrm{W}}{4\pi(9.0\times10^{10}~\mathrm{m})^2}=3.7\times10^3~\mathrm{W/m}^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-760799d382ac16f0d48771d65f7d5348_l3.svg "Rendered by QuickLaTeX.com")
![\[p=\frac{2I}{c}=\frac{2(3.7\times10^3~\mathrm{W/m}^2)}{3.00\times10^8~\mathrm{m/s}}=2.5\times10^{-5}~\mathrm{N/m}^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-1c9d7441000048922748ed025c23aaaf_l3.svg "Rendered by QuickLaTeX.com")
![\[F=pA=(2.5\times10^{-5}~\mathrm{N/m}^2)(4.0\times10^{-2}~\mathrm{m}^2)=1.0\times10^{-6}~\mathrm{N},\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-a92ddd1c48e52ed2ff92169d0849e9c6_l3.svg "Rendered by QuickLaTeX.com")
![\[F_g=\frac{GMm}{r^2}=\frac{(6.67\times10^{-11}~\mathrm{N}\cdot\mathrm{m}^2.\mathrm{kg}^2)(2.0\times10^{30}~\mathrm{kg})(10~\mathrm{kg})}{(9.0\times10^{10}~\mathrm{m})^2}=0.16~\mathrm{N}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-ee94df5bfb448aae1fc090cc4dd36b87_l3.svg "Rendered by QuickLaTeX.com")
 and is about the size as a loaf of bread. Its sails are made of very thin Mylar and open after launch to have a surface area of
and is about the size as a loaf of bread. Its sails are made of very thin Mylar and open after launch to have a surface area of 

 from the Sun is
from the Sun is  The LightSail spacecraft has sails with total area of
The LightSail spacecraft has sails with total area of  and a total mass of
and a total mass of  Calculate the maximum acceleration LightSail spacecraft could achieve from radiation pressure when it is about
Calculate the maximum acceleration LightSail spacecraft could achieve from radiation pressure when it is about ![\[F=pA=2uA=\frac{2I}{c}A=\frac{2(1370~\mathrm{W/m}^2)(32~\mathrm{m}^2)}{(3.00\times10^8~\mathrm{m/s})}=2.92\times10^{-4}~\mathrm{N}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-921b3dbb6477a4d337092b58e62c820a_l3.svg "Rendered by QuickLaTeX.com")
![\[a=\frac{F}{m}=\frac{2.92\times10^{-4}~\mathrm{N}}{5.0~\mathrm{kg}}=5.8\times10^{-5}~\mathrm{m/s}^2.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-654d161de6c4957a4262a0ee19b6bf27_l3.svg "Rendered by QuickLaTeX.com")
 or
or 

 between frequency
between frequency 
 Radio waves are commonly used for audio communications (i.e., for radios), but the term is used for electromagnetic waves in this range regardless of their application. Radio waves typically result from an alternating current in the wires of a broadcast antenna. They cover a very broad wavelength range and are divided into many subranges, including microwaves, electromagnetic waves used for AM and FM radio, cellular telephones, and TV signals.
Radio waves are commonly used for audio communications (i.e., for radios), but the term is used for electromagnetic waves in this range regardless of their application. Radio waves typically result from an alternating current in the wires of a broadcast antenna. They cover a very broad wavelength range and are divided into many subranges, including microwaves, electromagnetic waves used for AM and FM radio, cellular telephones, and TV signals. to
to  The accelerating charge in the ac currents of electrical power lines produce electromagnetic waves in this range. ELF waves are able to penetrate sea water, which strongly absorbs electromagnetic waves of higher frequency, and therefore are useful for submarine communications.
The accelerating charge in the ac currents of electrical power lines produce electromagnetic waves in this range. ELF waves are able to penetrate sea water, which strongly absorbs electromagnetic waves of higher frequency, and therefore are useful for submarine communications. In FM radio transmission, the frequency of the wave is modulated to carry this information, as illustrated in
In FM radio transmission, the frequency of the wave is modulated to carry this information, as illustrated in  on each side of its carrier frequency. The electromagnetic wave produces a current in a receiving antenna, and the radio or television processes the signal to produce the sound and any image. The higher the frequency of the radio wave used to carry the data, the greater the detailed variation of the wave that can be carried by modulating it over each time unit, and the more data that can be transmitted per unit of time. The assigned frequencies for AM broadcasting are
on each side of its carrier frequency. The electromagnetic wave produces a current in a receiving antenna, and the radio or television processes the signal to produce the sound and any image. The higher the frequency of the radio wave used to carry the data, the greater the detailed variation of the wave that can be carried by modulating it over each time unit, and the more data that can be transmitted per unit of time. The assigned frequencies for AM broadcasting are  and for FM are
and for FM are  to
to 

 to nearly
to nearly  Their high frequencies correspond to short wavelengths compared with other radio waves—hence the name “microwave.” Microwaves also occur naturally as the cosmic background radiation left over from the origin of the universe. Along with other ranges of electromagnetic waves, they are part of the radiation that any object above absolute zero emits and absorbs because of
Their high frequencies correspond to short wavelengths compared with other radio waves—hence the name “microwave.” Microwaves also occur naturally as the cosmic background radiation left over from the origin of the universe. Along with other ranges of electromagnetic waves, they are part of the radiation that any object above absolute zero emits and absorbs because of  are commonly used in microwave ovens. The electrons in a water molecule tend to remain closer to the oxygen nucleus than the hydrogen nuclei (
are commonly used in microwave ovens. The electrons in a water molecule tend to remain closer to the oxygen nucleus than the hydrogen nuclei (
 times per second. Interactions between the molecules distributes the energy being pumped into them. The
times per second. Interactions between the molecules distributes the energy being pumped into them. The  and
and  denote the charge distribution on the molecules.
denote the charge distribution on the molecules. microwave oven?
microwave oven?![\[d=\frac{1}{2}\lambda=\frac{1}{2}\frac{c}{f}=\frac{3.00\times10^8~\mathrm{m/s}}{2(2.45\times10^9~\mathrm{Hz})}=6.02~\mathrm{cm}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d445af0c6528ab7532c87683a7d2270d_l3.svg "Rendered by QuickLaTeX.com")
 to
to  range.
range. range between nearby devices, for example, to link to headphones and audio earpieces to devices such as radios, or a driver’s cell phone to a hands-free device to allow answering phone calls without fumbling directly with the cell phone.
range between nearby devices, for example, to link to headphones and audio earpieces to devices such as radios, or a driver’s cell phone to a hands-free device to allow answering phone calls without fumbling directly with the cell phone. of the solar energy is absorbed in the atmosphere, about 48% is absorbed at Earth’s surface, and about
of the solar energy is absorbed in the atmosphere, about 48% is absorbed at Earth’s surface, and about  is reflected back into space.
is reflected back into space. and about
and about  to which the normal human eye responds. Visible light is produced by vibrations and rotations of atoms and molecules, as well as by electronic transitions within atoms and molecules. The receivers or detectors of light largely utilize electronic transitions.
to which the normal human eye responds. Visible light is produced by vibrations and rotations of atoms and molecules, as well as by electronic transitions within atoms and molecules. The receivers or detectors of light largely utilize electronic transitions.
 ) is the lowest frequency, then UV-B (
) is the lowest frequency, then UV-B ( ) and UV-C (
) and UV-C ( ). Most UV-B and all UV-C are absorbed by ozone (
). Most UV-B and all UV-C are absorbed by ozone ( ) molecules in the upper atmosphere. Consequently,
) molecules in the upper atmosphere. Consequently,  to
to  They have shorter wavelengths, and higher frequencies, than ultraviolet, so that the energy they transfer at an atomic level is greater. As a result, X-rays have adverse effects on living cells similar to those of ultraviolet radiation, but they are more penetrating. Cancer and genetic defects can be induced by X-rays. Because of their effect on rapidly dividing cells, X-rays can also be used to treat and even cure cancer.
They have shorter wavelengths, and higher frequencies, than ultraviolet, so that the energy they transfer at an atomic level is greater. As a result, X-rays have adverse effects on living cells similar to those of ultraviolet radiation, but they are more penetrating. Cancer and genetic defects can be induced by X-rays. Because of their effect on rapidly dividing cells, X-rays can also be used to treat and even cure cancer. ray), was later found to be an extremely high-frequency electromagnetic wave.
ray), was later found to be an extremely high-frequency electromagnetic wave. ray frequency range overlaps the upper end of the X-ray range. Gamma rays have characteristics identical to X-rays of the same frequency—they differ only in source. The name “gamma rays” is generally used for electromagnetic radiation emitted by a nucleus, while X-rays are generally produced by bombarding a target with energetic electrons in an X-ray tube. At higher frequencies,
ray frequency range overlaps the upper end of the X-ray range. Gamma rays have characteristics identical to X-rays of the same frequency—they differ only in source. The name “gamma rays” is generally used for electromagnetic radiation emitted by a nucleus, while X-rays are generally produced by bombarding a target with energetic electrons in an X-ray tube. At higher frequencies,  to
to 
 to
to 









 which implies that the magnetic field
which implies that the magnetic field 
![\[I=\frac{c\epsilon_0E_0^2}{2}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2feda28b56c67b6d3b66da924e440c19_l3.svg "Rendered by QuickLaTeX.com")

![\[I=\frac{cB_0^2}{2\mu_0}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-b2d55a03d957abbf88fb2623c2ac3b37_l3.svg "Rendered by QuickLaTeX.com")
![\[I=\frac{E_0B_0}{2\mu_0}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d6da73c36d9177f49cafaa508ab4ac4d_l3.svg "Rendered by QuickLaTeX.com")
 so that for electromagnetic waves,
so that for electromagnetic waves,  where
where  independent of frequency. c. The ratio of electric and magnetic field amplitudes is
independent of frequency. c. The ratio of electric and magnetic field amplitudes is 
 helium-neon laser transmits a continuous beam of red light of cross-sectional area
helium-neon laser transmits a continuous beam of red light of cross-sectional area  If the beam does not diverge appreciably, how would its rms electric field vary with distance from the laser? Explain.
If the beam does not diverge appreciably, how would its rms electric field vary with distance from the laser? Explain.
 (b)
(b) 
 (d)
(d) 
 ac current?
ac current? on the plates is
on the plates is![\[B_{\mathrm{ind}}=\frac{\mu_0}{2\pi r}\frac{dQ(t)}{dt}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-aa92c4c987c4545a9ba2f85309ef9ff3_l3.svg "Rendered by QuickLaTeX.com")
 is maintained across a parallel-plate capacitor with capacitance
is maintained across a parallel-plate capacitor with capacitance  in the thin wire. Use these results to obtain an expression for the current
in the thin wire. Use these results to obtain an expression for the current  in the wires connected to the capacitor.
in the wires connected to the capacitor. and resistor current
and resistor current  What is the induced magnetic field at a distance of
What is the induced magnetic field at a distance of  What is the displacement current between the plates if the separation of the plates is
What is the displacement current between the plates if the separation of the plates is  ?
? and a separation of
and a separation of  What must be must be the angular frequency
What must be must be the angular frequency  and separation
and separation  varies sinusoidally as
varies sinusoidally as  where
where  where
where  away?
away? (about
(about  What is its wavelength in vacuum?
What is its wavelength in vacuum? being zero at
being zero at  and
and  (a) When are the field strengths next equal to zero? (b) When do they reach their most negative value? (c) How much time is needed for them to complete one cycle?
(a) When are the field strengths next equal to zero? (b) When do they reach their most negative value? (c) How much time is needed for them to complete one cycle?![\[\vec{\mathbf{E}}=(5.00~\mathrm{V/m})\cos\left[kx-\left(6.00\times10^9~\mathrm{s}^{-1}\right)t+0.40\right]\hat{\mathbf{j}}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-c05c5b0b5722f8871db341a9bc662fd9_l3.svg "Rendered by QuickLaTeX.com")



 moves in the positive
moves in the positive  The start of time is chosen so that at
The start of time is chosen so that at  at the origin. (a) Write the wave function that will describe the electric field wave. (b) Find the wave function that will describe the associated magnetic field wave.
at the origin. (a) Write the wave function that will describe the electric field wave. (b) Find the wave function that will describe the associated magnetic field wave.![\[E_x=0;~E_y=E_0\cos(kx-\omega t);~E_z=0,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-cbabccec7520f88708aed0f659f34bbe_l3.svg "Rendered by QuickLaTeX.com")
![\[B_x=0;~B_y=0; B_z=B_0\cos(kx-\omega t).\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-d34e444392eb857c939e6c4656e3c76c_l3.svg "Rendered by QuickLaTeX.com")
 and points eastward. What are the magnitude and direction of the magnetic field at this instant?
and points eastward. What are the magnitude and direction of the magnetic field at this instant?![\[E=(6.0\times10^{-3}~\mathrm{V/m})\sin\left[2\pi\left(\frac{x}{18~\mathrm{m}}-\frac{t}{6.0\times10^{-8}~\mathrm{s}}\right)\right]\hat{\mathbf{j}}.\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-00344adb252adf631d3317543a5c165e_l3.svg "Rendered by QuickLaTeX.com")
 At a receiver some distance from the antenna, the maximum magnetic field of the electromagnetic wave detected is
At a receiver some distance from the antenna, the maximum magnetic field of the electromagnetic wave detected is 
 Model the glass part of the bulb as a sphere of radius
Model the glass part of the bulb as a sphere of radius  and calculate the amount of electromagnetic energy from visible light inside the bulb.
and calculate the amount of electromagnetic energy from visible light inside the bulb. of its power as visible light. What is the rms electric field of the emitted light at a distance of
of its power as visible light. What is the rms electric field of the emitted light at a distance of  lightbulb emits
lightbulb emits  What is the electromagnetic energy in a
What is the electromagnetic energy in a 
 from the Sun and that sunlight is composed of electromagnetic plane waves.
from the Sun and that sunlight is composed of electromagnetic plane waves. where
where  and
and 
 ?
? (a) If such a laser beam is projected onto a circular spot
(a) If such a laser beam is projected onto a circular spot  of power uniformly in all directions. (a) Assuming all of the radio waves that strike the ground are completely absorbed, and that there is no absorption by the atmosphere or other objects, what is the intensity
of power uniformly in all directions. (a) Assuming all of the radio waves that strike the ground are completely absorbed, and that there is no absorption by the atmosphere or other objects, what is the intensity  away? (Hint: Half the power will be spread over the area of a hemisphere.) (b) What is the maximum electric field strength at this distance?
away? (Hint: Half the power will be spread over the area of a hemisphere.) (b) What is the maximum electric field strength at this distance? (a) If a radar unit leaks
(a) If a radar unit leaks  of microwaves (other than those sent by its antenna) uniformly in all directions, how far away must you be to be exposed to an intensity considered to be safe? Assume that the power spreads uniformly over the area of a sphere with no complications from absorption or reflection. (b) What is the maximum electric field strength at the safe intensity? (Note that early radar units leaked more than modern ones do. This caused identifiable health problems, such as cataracts, for people who worked near them.)
of microwaves (other than those sent by its antenna) uniformly in all directions, how far away must you be to be exposed to an intensity considered to be safe? Assume that the power spreads uniformly over the area of a sphere with no complications from absorption or reflection. (b) What is the maximum electric field strength at the safe intensity? (Note that early radar units leaked more than modern ones do. This caused identifiable health problems, such as cataracts, for people who worked near them.) -diameter university communications satellite dish receives TV signals that have a maximum electric field strength (for one channel) of
-diameter university communications satellite dish receives TV signals that have a maximum electric field strength (for one channel) of  (see below). (a) What is the intensity of this wave? (b) What is the power received by the antenna? (c) If the orbiting satellite broadcasts uniformly over an area of
(see below). (a) What is the intensity of this wave? (b) What is the power received by the antenna? (c) If the orbiting satellite broadcasts uniformly over an area of  (a large fraction of North America), how much power does it radiate?
(a large fraction of North America), how much power does it radiate? for a time of
for a time of  (a) What is the maximum magnetic field strength in the wave? (b) What is the intensity of the beam? (c) What energy does it deliver on an
(a) What is the maximum magnetic field strength in the wave? (b) What is the intensity of the beam? (c) What energy does it deliver on an  area?
area? if
if  and mass
and mass  is moving in outer space at a constant speed of
is moving in outer space at a constant speed of  A wave of light strikes it from the opposite direction of its motion and gets absorbed. Assuming the particle decelerates uniformly to zero speed in one second, what is the average electric field amplitude in the light?
A wave of light strikes it from the opposite direction of its motion and gets absorbed. Assuming the particle decelerates uniformly to zero speed in one second, what is the average electric field amplitude in the light? and mass
and mass  is to be suspended by the radiation pressure in a vacuum tube in a lab. How much intensity will be required if the light is completely absorbed the ball?
is to be suspended by the radiation pressure in a vacuum tube in a lab. How much intensity will be required if the light is completely absorbed the ball? for sunlight at a point on the surface of Earth is
for sunlight at a point on the surface of Earth is  (a) If sunlight falls perpendicularly on a kite with a reflecting surface of area
(a) If sunlight falls perpendicularly on a kite with a reflecting surface of area  what is the average force on the kite due to radiation pressure? (b) How is your answer affected if the kite material is black and absorbs all sunlight?
what is the average force on the kite due to radiation pressure? (b) How is your answer affected if the kite material is black and absorbs all sunlight? A sunbather has a body surface area of
A sunbather has a body surface area of  facing the sun while reclining on a beach chair on a clear day. (a) How much energy from direct sunlight reaches the sunbather’s skin per second? (b) What pressure does the sunlight exert if it is absorbed?
facing the sun while reclining on a beach chair on a clear day. (a) How much energy from direct sunlight reaches the sunbather’s skin per second? (b) What pressure does the sunlight exert if it is absorbed? blue light?
blue light? ) with electromagnetic radiation, it must have a wavelength of about this size. (a) What is its frequency? (b) What type of electromagnetic radiation might this be?
) with electromagnetic radiation, it must have a wavelength of about this size. (a) What is its frequency? (b) What type of electromagnetic radiation might this be? to
to 
 (b) Do the same for the FM frequency range of
(b) Do the same for the FM frequency range of  to
to  broadcasts a time synchronization signal whose range covers the entire continental US. The timing of the synchronization signal is controlled by a set of atomic clocks to an accuracy of
broadcasts a time synchronization signal whose range covers the entire continental US. The timing of the synchronization signal is controlled by a set of atomic clocks to an accuracy of  and repeats every
and repeats every  (
( ) from Fort Collins, Colorado.
) from Fort Collins, Colorado. output and a range of about
output and a range of about  What output power would reduce its range to
What output power would reduce its range to  for use with the same devices as before? Assume there are no obstacles in the way and that microwaves into the ground are simply absorbed.
for use with the same devices as before? Assume there are no obstacles in the way and that microwaves into the ground are simply absorbed. ) and “kilo” (
) and “kilo” ( ), when referring to amounts of computer data, refer to factors of
), when referring to amounts of computer data, refer to factors of  or
or  rather than
rather than  rather than
rather than  for the prefix mega. If a wireless (WiFi) router transfers
for the prefix mega. If a wireless (WiFi) router transfers  of data, how many bits per second is that in decimal arithmetic?
of data, how many bits per second is that in decimal arithmetic? (megabits per second). Compare the average time to transmit one bit of data with the time difference between the wifi signal reaching an observer’s cell phone directly and by bouncing back to the observer from a wall
(megabits per second). Compare the average time to transmit one bit of data with the time difference between the wifi signal reaching an observer’s cell phone directly and by bouncing back to the observer from a wall  past the observer.
past the observer. ) of the electromagnetic radiation being sent out. If a new radio station has such an antenna that is
) of the electromagnetic radiation being sent out. If a new radio station has such an antenna that is  high, what frequency does it broadcast most efficiently? Is this in the AM or FM band? (b) Discuss the analogy of the fundamental resonant mode of an air column closed at one end to the resonance of currents on an antenna that is one-fourth their wavelength.
high, what frequency does it broadcast most efficiently? Is this in the AM or FM band? (b) Discuss the analogy of the fundamental resonant mode of an air column closed at one end to the resonance of currents on an antenna that is one-fourth their wavelength. ? (b) Yellow light of frequency
? (b) Yellow light of frequency  ? (c) Gamma rays of frequency
? (c) Gamma rays of frequency  ?
? what are
what are  What is the maximum magnitude of the oscillating magnetic field at that location? How does it compare with Earth’s magnetic field?
What is the maximum magnitude of the oscillating magnetic field at that location? How does it compare with Earth’s magnetic field? and
and  Calculate the wavelength of each. (b) Which frequency would produce smaller hot spots in foods due to interference effects?
Calculate the wavelength of each. (b) Which frequency would produce smaller hot spots in foods due to interference effects? potential across
potential across  of a person’s chest, creating a
of a person’s chest, creating a  electromagnetic wave. (a) What is the maximum electric field strength created? (b) What is the corresponding maximum magnetic field strength in the electromagnetic wave? (c) What is the wavelength of the electromagnetic wave?
electromagnetic wave. (a) What is the maximum electric field strength created? (b) What is the corresponding maximum magnetic field strength in the electromagnetic wave? (c) What is the wavelength of the electromagnetic wave? away? (c) The most distant galaxy yet discovered is
away? (c) The most distant galaxy yet discovered is  away. How far is this in meters?
away. How far is this in meters? ac power line radiates an electromagnetic wave having a maximum electric field strength of
ac power line radiates an electromagnetic wave having a maximum electric field strength of  (a) What is the wavelength of this very-low-frequency electromagnetic wave? (b) What type of electromagnetic radiation is this wave (b) What is its maximum magnetic field strength?
(a) What is the wavelength of this very-low-frequency electromagnetic wave? (b) What type of electromagnetic radiation is this wave (b) What is its maximum magnetic field strength? ultraviolet radiation used in laser eye surgery? (b) Assuming the accuracy with which this electromagnetic radiation can ablate (reshape) the cornea is directly proportional to wavelength, how much more accurate can this UV radiation be than the shortest visible wavelength of light?
ultraviolet radiation used in laser eye surgery? (b) Assuming the accuracy with which this electromagnetic radiation can ablate (reshape) the cornea is directly proportional to wavelength, how much more accurate can this UV radiation be than the shortest visible wavelength of light?![\[E-x=(10~\mathrm{N/C})\sin(20x-500t),~~~E_y=E_z=0,\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-8c66946fe01f8a71e9d8d5a295228530_l3.svg "Rendered by QuickLaTeX.com")
 Find the displacement current through a circle of radius
Find the displacement current through a circle of radius  to heat foods. The waves reflect from the inside walls of the oven to produce an interference pattern of standing waves whose antinodes are hot spots that can leave observable pit marks in some foods. The pit marks are measured to be
to heat foods. The waves reflect from the inside walls of the oven to produce an interference pattern of standing waves whose antinodes are hot spots that can leave observable pit marks in some foods. The pit marks are measured to be  ?
?![\[\frac{\partial^2f}{\partial x^2}=\frac{1}{v^2}\frac{\partial^2f}{\partial t^2}\]](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-35d4227b4f9839c1619fd33449c517dc_l3.svg "Rendered by QuickLaTeX.com")
 or
or 
 of spaghetti by
of spaghetti by  (a) What was the rate of energy absorption by the spaghetti, given that its specific heat is
(a) What was the rate of energy absorption by the spaghetti, given that its specific heat is  ? Assume the spaghetti is perfectly absorbing. (b) Find the average intensity of the microwaves, given that they are absorbed over a circular area
? Assume the spaghetti is perfectly absorbing. (b) Find the average intensity of the microwaves, given that they are absorbed over a circular area  of microwaves onto a
of microwaves onto a  area. (a) What is its intensity in
area. (a) What is its intensity in  laser is concentrated on a
laser is concentrated on a  electric charge is in the beam. What is the maximum electric force it experiences? (c) If the electric charge moves at
electric charge is in the beam. What is the maximum electric force it experiences? (c) If the electric charge moves at  what maximum magnetic force can it feel?
what maximum magnetic force can it feel? flat coil of wire
flat coil of wire  in diameter acts as an antenna for FM radio at a frequency of
in diameter acts as an antenna for FM radio at a frequency of  The magnetic field of the incoming electromagnetic wave is perpendicular to the coil and has a maximum strength of
The magnetic field of the incoming electromagnetic wave is perpendicular to the coil and has a maximum strength of  (a) What power is incident on the coil? (b) What average emf is induced in the coil over one-fourth of a cycle? (c) If the radio receiver has an inductance of
(a) What power is incident on the coil? (b) What average emf is induced in the coil over one-fourth of a cycle? (c) If the radio receiver has an inductance of  what capacitance must it have to resonate at
what capacitance must it have to resonate at  ?
? What would be the intensity of this signal if it is received on a planet orbiting Proxima Centuri, the closest star to our Sun, at
What would be the intensity of this signal if it is received on a planet orbiting Proxima Centuri, the closest star to our Sun, at  away?
away? Assume as a model approximation that all of the light is absorbed. (Actually, about
Assume as a model approximation that all of the light is absorbed. (Actually, about  of the light intensity is reflected out into space.)
of the light intensity is reflected out into space.)
 ? (b) What percent accuracy is this, given the average distance to the Moon is
? (b) What percent accuracy is this, given the average distance to the Moon is  ?
? ? (b) What is the echo time for a car
? (b) What is the echo time for a car  from a highway police radar unit? (c) How accurately (in nanoseconds) must you be able to measure the echo time to an airplane
from a highway police radar unit? (c) How accurately (in nanoseconds) must you be able to measure the echo time to an airplane  away to determine its distance within
away to determine its distance within  )
) compare with the wavelength of the lowest audible sound waves (of
compare with the wavelength of the lowest audible sound waves (of  ). The speed of sound in air at
). The speed of sound in air at 
 (see below).
(see below).
 for
for  obtain an expression in terms of
obtain an expression in terms of  for the rate at which electromagnetic field energy enters the region between the plates.
for the rate at which electromagnetic field energy enters the region between the plates. (a) Assuming the dust particles are spherical and light absorbing, and are at the same distance as Earth from the Sun, determine the particle size for which radiation pressure from sunlight is equal to the Sun’s force of gravity on the dust particle. (b) Explain how the forces compare if the particle radius is smaller. (c) Explain what this implies about the sizes of dust particle likely to be present in the inner solar system compared with outside the Oort cloud.
(a) Assuming the dust particles are spherical and light absorbing, and are at the same distance as Earth from the Sun, determine the particle size for which radiation pressure from sunlight is equal to the Sun’s force of gravity on the dust particle. (b) Explain how the forces compare if the particle radius is smaller. (c) Explain what this implies about the sizes of dust particle likely to be present in the inner solar system compared with outside the Oort cloud.






















































































































































































 and the temperature is
and the temperature is 



































































































 (exact)
(exact)








 (exact)
(exact)


 at
at 



 then
then 


































![\frac{d}{dx}[af(x)]=a\frac{d}{dx}f(x)](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-50647542d18321f3c725bc97355e58e9_l3.svg "Rendered by QuickLaTeX.com")
![\frac{d}{dx}[f(x)+g(x)]=\frac{d}{dx}f(x)+\frac{d}{dx}g(x)](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-9bb9159eb33c9d46f229ea3e26613701_l3.svg "Rendered by QuickLaTeX.com")
![\frac{d}{dx}[f(x)g(x)]=f(x)\frac{d}{dx}g(x)+g(x)\frac{d}{dx}f(x)](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-2e897271e2fb63839ac3e3c56b296ab1_l3.svg "Rendered by QuickLaTeX.com")
![\frac{d}{dx}f(u)=\left[\frac{d}{du}f(u)\right]\frac{du}{dx}](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-20f40bc184eab21f36200f451daec656_l3.svg "Rendered by QuickLaTeX.com")













![\int[f(x)+g(x)]\,dx=\int f(x)\,dx+\int g(x)\,dx](https://openpress.usask.ca/app/uploads/quicklatex/quicklatex.com-10535217ae624c4e07fbf560df28e10c_l3.svg "Rendered by QuickLaTeX.com")





































