Differential Equations

Differential Equations Copyright © 2024 by Amir Tavangar is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License, except where otherwise noted.
eCampus Ontario
Differential Equations Copyright © 2024 by Amir Tavangar is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License, except where otherwise noted.
1
This open-access textbook is designed to make the study of Differential Equations accessible and engaging for everyone. Differential Equations is a resource primarily intended for engineering students, but it’s versatile and beneficial for learners from any discipline. It serves as a comprehensive tool, whether you’re approaching differential equations for the first time or revisiting the topic for a refresher. Instead of delving into theorem proofs or formula derivations, the focus is on offering a step-by-step guide for solving differential equations.
Each chapter in this resource introduces essential concepts and provides illustrative examples with detailed solutions. Following these examples, there are ‘Try An Example’ questions to evaluate your comprehension. These questions are generated dynamically through MyOpenMath, enabling the generation of similar questions and providing immediate feedback to aid your learning process.
Incorporating interactive elements such as videos, dynamic problems, and graphs, the textbook is optimized for web viewing through Pressbook. This enables full interaction with its multimedia content, from watching instructional videos to engaging with dynamic graphs and problem sets. While a downloadable PDF version is available, it does not include the interactive features found in the web format.
This project has received support and funding from the Government of Ontario and eCampusOntario. The views expressed in this publication are the views of the author(s) and do not necessarily reflect those of the Government of Ontario.
![]()
![]()
2
I am grateful for the support and contributions that have made this resource possible. First and foremost, my thanks go to the Government of Ontario and eCampusOntario, whose funding and belief in the importance of accessible educational resources have been instrumental in bringing this project to fruition.
I am profoundly grateful to Dr. Mohammad Reza Peyghami for his expertise and thoughtful feedback, which have been instrumental in shaping this resource.
Special thanks are also due to two remarkable Engineering students, Jazel Paco and Minh Khanh Truong, for their keen insights and diligent review, which have significantly enhanced the quality and accuracy of this work.
I extend my gratitude to the myriad of scientists, mathematicians, and educators whose foundational work underpins the concepts and methods presented in this book. While citing all their contributions individually within the text is impractical, their collective efforts have been indispensable. The References section lists key resources that have been instrumental in shaping the content of this book.
3
The web version of this textbook is fully compliant with the Accessibility for Ontarians with Disabilities Act (AODA) requirements and adheres to the Web Content Accessibility Guidelines (WCAG) 2.0, Level AA standards. Furthermore, it aligns with the comprehensive checklist provided in Appendix A: Checklist for Accessibility of the Accessibility Toolkit – 2nd Edition, ensuring it meets the highest standards of accessibility.
Designed with interactivity at its core, the textbook incorporates videos, dynamic problems, graphs, and simulations, making it ideally suited for online learning through Pressbook. Key accessibility features have been integrated into the web version to accommodate diverse learning needs:
This holistic approach to accessibility ensures that all learners, regardless of their physical abilities, can effectively engage with and benefit from the rich educational content provided in this textbook.
I
This chapter provides an overview of fundamental concepts in differential equations along with an introduction to direction fields for first-order differential equations.
1.1 Introduction: This section covers basic definitions concerning differential equations, including their order, various classifications, and the nature of their solutions.
1.2 Direction Fields: This section briefly introduces direction fields, a tool for visually representing the behavior of solutions to first-order differential equations without needing an exact solution formula.

Émilie du Châtelet, born in Paris in 1706, was a woman of exceptional intellect and determination who carved her unique path in the male-dominated world of science and mathematics during the Enlightenment. Despite societal norms restricting women’s access to formal education, Du Châtelet educated herself in mathematics and physics, often through creative means such as disguising herself as a man to attend lectures. Her most significant work, a translation and commentary on Isaac Newton’s ‘Principia Mathematica’, remains the standard French translation to this day. In it, she clarified Newton’s ideas and expanded on them, particularly in her elucidation of the principle of conservation of energy. Émilie du Châtelet’s work laid the groundwork for future developments in physics and mathematics, including those in differential equations. Her tenacity and brilliance broke through the constraints of her time, paving the way for future generations of women in science, and her legacy continues to inspire and challenge norms in the scientific community.
Differential equations (DEs) are mathematical equations that describe the relationship between a function and its derivatives, either ordinary derivatives or partial derivatives. In its simplest form, it describes the rate at which a quantity changes in terms of the quantity itself and its derivatives. Differential equations are powerful tools in mathematics and science as they enable the modeling of a wide range of real-world phenomena across various disciplines, including physics, engineering, biology, economics, and many others. Here are a few examples of differential equations.
/(dt)=aP")
/dt=-kQ")
/(dt)=-k(T-T_m)")
/(dx^2 )=-g")
/(dt)+RI=E(t)")
/(dt^2 )+RI+1/C I=(dE)/dt")
/(del t) =beta (del^2 u)/(del x^2)")
The order of a differential equation is the order of the highest derivative that appears in the equation. For example, if the highest derivative is a second derivative, the equation is of second order. Here are a few examples:

/dt^2 -2dy/dt + y= -5x")

/(del t)=5(del^2 u)/(del t^2)")
The order of a differential equation often determines the methods used to solve it. The order of a differential equation is independent of the type of derivatives involved, whether they are ordinary or partial derivatives.
Throughout this book, our focus will primarily be on first- and second-order differential equations. As you’ll discover, the methods used to solve second-order differential equations can often be easily extended to tackle higher-order equations.
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=5
An Ordinary Differential Equation (ODE) is a differential equation involving a function of one independent variable and its derivatives. All the above examples except the heat equation are ordinary differential equations.
A Partial Differential Equation (PDE) is a differential equation that contains unknown multivariable functions and their partial derivatives. PDEs are used to formulate problems involving functions of several variables.
In this textbook, our primary focus will be on ordinary differential equations, which involve functions of a single variable. We will only delve into partial differential equations in the final chapter.
A linear differential equation is one in which the dependent variable 
")
")
 (d^ny)/dx^n+a_(n-1)(x) (d^(n-1) y)/dx^(n-1)+")
where is the dependent variable, is the independent variable, are functions of (which can be constants or zeros), and is a function of .
A nonlinear differential equation is one in which the dependent variable or its derivatives appear to a power greater than one, or they are multiplied together, or in any way that does not fit the linear form. For example, 

One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=5
A differential equation is termed homogeneous if every term in the equation is a function of the dependent variable and its derivatives. For linear differential equations, an equation is homogeneous if the function ")
For example, the linear equation /(dx^2 )+3 (dy)/(dx)+2y=0")
A differential equation is nonhomogeneous if it includes terms that are not solely functions of the dependent variable and its derivatives. For linear equations, this typically means there is a non-zero function on the right-hand side of the equation. For example, the linear equation /(dx^2 )+3 (dy)/(dx)+2y=xe^x")

A solution of a differential equation is a function that satisfies the equation on some open interval. This means that when the function and its derivatives are plugged into the differential equation, the equation holds true for all values within the interval. Often there are a set of solutions.
Verify  + x^2")

First, we find 
+2x")

+2")
By substituting
which is equal to the right-hand side of the equation. Since the given
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=5
Now, consider the differential equation 


An explicit solution explicitly expresses the dependent variable in terms of the independent variable(s). For example, 
Initial condition(s) refer to the values specified for the dependent variable and possibly its derivatives at a specific point. Initial conditions are used to determine the specific (or particular) solution of a differential equation from the general solution, which typically contains arbitrary constants. For example, =y_0")



th")
An Initial Value Problem (IVP) is a differential equation with initial condition(s) that nails down one particular solution. A solution might not be valid for all real numbers – there is the “interval of validity” or the domain of the solution.

=2")



Although having an explicit formula for the solution of a differential equation is useful for understanding the nature of the solution, determining where it increases or decreases, and identifying its maximum or minimum values, finding such a formula is often impossible for most real-world differential equations. Consequently, alternative methods are employed to gain insights into these questions. One effective approach for visualizing the solution of a first-order differential equation is to create a direction field for the equation. This method provides a graphical representation of the solution’s behavior without requiring an explicit formula.
We assume that the first-order differential equation ")
")
For the equation 
")

The general solution of the equation is 
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=89
Figure 1.2.1 Direction field for and solutions to
The arrows in the direction fields represent tangents to the actual solutions of the differential equations. We can use these arrows as guides to sketch the graphs of the solutions to the differential equation, providing a visual representation of how the solutions behave. By following these arrows, we can visually trace the trajectory of a solution over time, which can indicate its long-term behavior.
II
This chapter delves into first-order differential equations, vital in science and engineering for modeling rates of change in numerous phenomena. It covers their structure, solution techniques, and real-world applications in fields like population dynamics, thermal processes, and electrical circuits.
2.1 Separable First-Order Differential Equations: This section addresses separable differential equations, a category of first-order equations where each variable can be separated on different sides of the equation.
2.2 Linear First-Order Differential Equations: This section covers the solution to first-order nonhomogeneous linear equations.
2.3 Exact Differential Equations: This part explains the criteria for an equation to be exact and outlines methods for solving these equations.
2.4 Integrating Factors: This section explores the techniques of utilizing integrating factors to transform a non-exact equation into an exact equation that can be solved.
2.5 Applications of First-Order Differential Equations: The final section illustrates the use of first-order differential equations in modeling growth and decay, substance mixing, temperature changes, motion under gravity, and circuit behaviors.

Mary Cartwright, born in 1900 in Aynho, Northamptonshire, England, emerged as a pioneering mathematician in an era when female academics were a rarity. Her journey in mathematics began at Oxford University, leading her to Cambridge, where she initially focused on classical analysis. However, it was during World War II, while investigating the problem of radio waves and their interference patterns, that Cartwright made a groundbreaking discovery. Collaborating with J.E. Littlewood, she delved into nonlinear differential equations, and their work laid the foundational stones for what would later be known as chaos theory. Cartwright’s foray into this field produced seminal results, including the Cartwright-Littlewood theorem and her study of the Van der Pol oscillator, a concept critical in the understanding of oscillatory systems. Her extraordinary contributions not only advanced the field of mathematics but also broke gender barriers, setting a precedent for women in STEM. Mary Cartwright’s life was a blend of intellectual rigor and quiet resilience, inspiring a legacy that continues to encourage mathematicians, especially women, to explore and reshape the boundaries of mathematical knowledge.
Separable equations are a type of first-order differential equations that can be rearranged so all terms involving one variable are on one side of the equation and all terms involving the other variable are on the opposite side. This characteristic makes them easier to solve compared to other types of differential equations. Often, these equations represent nonlinear relationships.
Understanding and applying integration techniques is crucial for solving separable equations. Therefore, reviewing and familiarizing yourself with standard integration methods is recommended before attempting to solve these equations.
A first-order differential equation is called separable if it can be written in the form of
where ")

")
For example, the equation /y^2")
/y^2)=g(x)p(y)")

To solve the equation  p(y)")
1. Separate variables: multiply both sides by 
=1/(p(y))")
2. Integrate both sides:dy=intg(x)dx")
=G(x) +C")
3. Solve for
Solve the nonlinear equation
/y^2")
1. Multiplying both sides by
2. Integrating both sides, we get
3. Multiplying by 3 and taking the cubic root of both sides, we obtain
By substituting constant 
Solve the differential equation
")
This is a separable differential equation as it can be expressed in the form
1. Multiplying both sides by 
2. Integrating both sides, we get
3. Exponentiating both sides yields
-6x)")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=138
When solving nonlinear differential equations using the separable method, it is crucial to consider the interval of validity, which is the range of the independent variable, typically
Additionally, due to the nature of nonlinear equations, certain initial conditions might lead to no solution or multiple solutions, emphasizing the need to carefully select and verify the range of
Solve the initial value problem

Find the general solution:
After factoring out 
1. Multiplying both sides by ")
2. Integrating both sides, we get
3. Multiplying by 7 and exponentiating both sides, we obtain
By rearranging the equation and substituting ")
Applying the initial condition:
The solution to the IVP problem is then
There is no restriction on the domain of ")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=138
Solve the initial value problem and find the interval of validity of the solution.
/(dx)=(5y^2)/(sqrt(x))")
Find the general solution:
This is a separable differential equation as it can be expressed in the form  dy=g(x) dx.")
1. Multiplying both sides by ")
2. Integrating both sides, we get
3. Multiplying by -1 and taking the reciprocal of both sides, we obtain the explicit solution
Applying the initial condition:
The solution to the IVP problem is then
Find the interval of validity:
To establish the interval of validity for the solution, we need to consider two constraints:
 =0" title="x>=0" class="asciimath mathjax">).
=0" title="x>=0" class="asciimath mathjax">).-55!=0") , it implies that
, it implies that  .
.The interval of validity is the range of
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=138
 sqrt(1-y^2)")
explicitly as a function of .

=3")
/(dx) = (3 y^2)/sqrt(x), \ \ \ y(4) = 1/42")
Interval of validity:
A first-order differential equation is classified as linear if it can be written as
A first-order differential equation that cannot be expressed in that form is called nonlinear. If =0")
")

Some equations may not appear to be linear at first, such as  y = 2sin(x)")
/x^3 y = (2sin(x))/x^3")
Theorem: If ")
")
In our discussions within this text, we will not always explicitly mention the interval when seeking the general solution of a specific linear first-order equation. By default, this implies that we are looking for the general solution on every open interval where the functions and in the equation are continuous.
To solve Equation 2.2.1, we start by assuming that the solution can be expressed as , where is a known solution to the corresponding homogeneous equation (called complementary equation), and ")
By simplifying and rearranging, we obtain
Since is a solution to the complementary equation, , simplifying the expression to . Integrating both sides allows us to determine =int(q(x))/(y_1(x))dx+C")
Now that we understand the derivation of the solution, let’s outline the solution process in the following steps.
1. Write the equation in the standard form.
2. Calculate the integrating factor letting the constant of integration be zero for convenience.
3. Integrate the right-hand side equation and simplify where possible. Ensure you properly deal with the constant of integration.
Occasionally, the function ")
Find the general solution to
/x^2=xcosx")

1. First, we multiply by
So =-2/x")
2. Thus, the integrating factor is
3. Substituting into the general formula, we obtain
Figure 2.2.1 depicts the sketches of the solutions for various values of constant
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=144
Figure 2.2.1 Graph of 
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=144
Theorem – Existence and Uniqueness of solution: If ")
a) The general solution to the nonhomogeneous equation is
b) If 
Solve the initial problem
+4x^2+4x")
Find the general solution:
1. First, we rearrange the equation to put it in the standard form:
Therefore, =-1/(x+1)")
=4x(x+1)")
2. The integrating factor is
3. Substituting into the general formula for the solution, we obtain
Apply the initial condition to find C:
=-6")
(2(1^2)+C)=-6")
=-6")


The solution to the IVP problem then is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=144
") of equation
of equation y+xsec(x)") .
.
")

 with the initial condition
with the initial condition  = 3")
+4t^2+4t\ ,")
=7")
Exact differential equations are a class of first-order differential equations that can be solved using a particular integrability condition. This section will discuss what makes an equation exact, how to verify this condition, and the methodology for solving such equations.
We begin by introducing a foundational theorem followed by an illustrative example to demonstrate its application. Following that, we delve into the concept of exact equations and explore a method for solving them.
Theorem: If function ")


=c")
 dx + F_y(x,y) dy = 0")
The theorem can be proven by using implicit differentiation.
Show that 
To apply the theorem effectively, we need to define 
letting =")

We observe that 
We now shift our focus to a broader understanding of exact differential equations. Consider a differential equation expressed as
which can also be represented as
 + N(x,y) (dy)/(dx) = 0")
An equation of this form is called exact if there is a function ")
")
=c")
For instance, the equations 
/(dx)=0")
Now the pertinent questions are
and thus a solution?with partial derivatives and that match and , respectively. If and its partial derivatives  and
and  are continuous, then the cross partial derivatives of must be equal:
are continuous, then the cross partial derivatives of must be equal:
=")
or equivalently,
This relationship is summarized in the theorem below.
Theorem. Consider that the first derivatives of ")

is exact in ")
To address the second question of solving an exact differential equation, follow the step-by-step procedure outlined below.
1*. Find /(delx) (x,y)=M")
2. Determine the Arbitrary Function:
a. To find ")
")
b. After isolating
3. Form the general Solution: The solution to dx + N(x,y) dy = 0")
where
*Note: As an alternative method, you might also start by integrating /(dely) (x,y)=N")
Determine if the equation is exact and if so find the solution:
1) Test for Exactness:


Since 
2) Find the solution:
1. We know 
2a. To find
Since =9xy^2")
By comparing, we determine that  = 0")
2b. By integrating = C")
=0")

3. Thus, an implicit solution to the differential equation is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=146
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=146
a) Solve the initial value problem and find the explicit solution ")
e^x dx+9y^2(e^x-3)dy = 0,")
a)
1) Test for Exactness:
e^x")
")
Since
2) Find the general solution:
We have the option to integrate
1.
It is important to note that we include an arbitrary function of ")
2a. To find
Since =(3y^3-1)e^x")
")
=")
2b. By integrating = -e^x+C_1")
=-e^x")
3. Thus, an implicit solution to the differential equation is
Apply the initial condition:
The solution to the IVP problem then is
We need to find the explicit solution, so we rearrange the equation to solve for
b) Find the interval of validity:
To establish the interval of validity for the solution, we need to ensure the denominator of the rational function is not equal to zero to avoid undefined expressions:
Therefore, the interval of validity for the solution is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=146
(dy)/(dx) = 0") .
.
/(dx) = (-10 e^xcos(y)-3y^2/x)/(-10 e^xsin(y)+6yln(x)+2y^2)") .
.
e^x dx+6y^2(e^x+3)dy = 0") ,
, =-2") .
.
When faced with a non-exact first-order differential equation, the method of integrating factors provides a systematic way to transform it into an exact equation that can be solved. This section explores the techniques of utilizing integrating factors for solving differential equations.
Sometimes a differential equation that is not initially exact can be transformed into an exact one by multiplying through by an appropriate function, ")
dx+2xydy=0")
It is not exact because 

 = x")
dx+2x^2ydy=0")
This equation is now exact as 
The function
makes it exact, then
When you encounter a first-order differential equation in the form 
1. Compute partial derivatives: Compute 

2. Check for exactness:
, then the equation is already exact, and no integrating factor is needed. , the equation is not exact, and you may proceed to find an integrating factor.
, the equation is not exact, and you may proceed to find an integrating factor.3. Find a special integrating factor:
/N") (i). If (i) is a function of only, then an integrating factor is given by
(i). If (i) is a function of only, then an integrating factor is given by =e^(int (M_y-N_x)/N dx") . only, compute the expression
. only, compute the expression /M") (ii). If (ii) is a function of only, then an integrating factor is given by
(ii). If (ii) is a function of only, then an integrating factor is given by =e^(int (N_x-M_y)/M dy") .
.4. Apply the integrating factor: Multiply the entire differential equation by the integrating factor 
5. Solve the exact equation: Once the equation is made exact, solve it using the method outlined in Section 2.3 for exact equations.
Solve
A quick inspection shows that the equation is neither separable nor linear nor exact. Therefore, we check if a special integrating factor exists:
Since (i) is the function of only
Multiplying =x^(-2)")
Solving the equation using the exact method, we get the implicit solution
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=148
dx + (x+1)dy = 0")
a)
b)
dx+(-4x^2y+x)dy = 0")
a)
b)
Mathematical modeling is the process of translating real-world problems into mathematical language. This involves formulating, developing, and rigorously testing models to represent and solve complex issues. Differential equations, including both ordinary and partial types, are instrumental in these models. They relate some function with its derivatives, representing rates of change. This makes them particularly suited to modeling dynamic systems where understanding how things evolve is crucial.
In this section, we will explore how first-order differential equations are applied across various domains, including growth and decay processes, substance mixing, Newton’s law of cooling, the dynamics of falling objects, and the analysis of electrical circuits.
One of the most common applications of first-order differential equations is in modeling population growth or decline. The models provide insights into how populations change over time due to births, deaths, immigration, and emigration. The simplest model for population growth is the Exponential Growth Model, which assumes an unlimited resource environment. It is represented by the differential equation:
where 

where 

If 

When dealing with problems where there are different rates of population entering and exiting a region, the key is to understand that the overall rate of change of the population is the result of the difference between the rate of population entering (immigration or birth) and the rate of population leaving (emigration or death). This can be represented as a differential equation that models the net change in population over time. The general approach is to set up a balance equation reflecting these rates:
Here ")
")
A fish population in a lake grows at a rate proportional to its current size. Without outside factors, the fish population doubles in 10 days. However, each day, 5 fish migrate into the area, 16 are caught by fishermen, and 7 die of natural causes. Determine if the population will survive over time and, if not, when the population will become extinct. The initial population is 200 fish.
/(dt)=R_(\"in\")-R_(\"out\")")
/(dt)=(rP(t)+5)-(16+7)")
/(dt)=rP(t)-18,")
Before we solve this IVP, we need to find
/(dt)=rP(t),")
The general solution to this separable differential equation is
Applying the initial condition, we obtain
Now, we return to the original differential equation.
/(dt)=ln(2)/10 P-18,")
This is a linear differential equation. we write it in standard form:
The integrating factor is
The general solution is
Applying the initial condition gives
Thus the specific solution is
The exponential term has a positive exponent and thus grows exponentially. However, since the coefficient of the exponential term is negative, the whole population declines and becomes extinct eventually. To determine when the population will become extinct, we set 


One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=150
Mixing problems involve combining substances or quantities and observing how they interact over time. This can refer to pollutants in a lake, different chemicals in a reactor, or even sugar dissolving in coffee. The common element in these scenarios is the change in concentration of substances in a mixture over time. Through differential equations, specifically first-order ones, we can model and solve these dynamic situations.
In mixing problems, ")
/(dt)")
For a typical mixing problem, you might have a tank that contains a certain amount of fluid into which another substance is being mixed. The concentration of the substance in the tank changes as more of the substance is added or removed. The general first-order differential equation for such a scenario is similar to what we discussed for the population change of a region.
Here ")
")
Consider a tank holding 2000 liters of fresh water. Starting at 

Given information
 ) is constant since water inflow and outflow are equal:
) is constant since water inflow and outflow are equal: 



a) Our task is to determine the rate at which salt enters the tank (
The rate at which salt enters the tank is the product of the salt concentration of the incoming water and the water inflow rate:
The rate at which salt leaves the tank is the concentration of salt in the tank (ratio of the salt in the tank to the volume of water in the tank), multiplied by the water outflow rate. At any time, the quantity of salt in the tank is
The tank initially has pure fresh water without any salt, so =0")
/(dt)=0.8-(Q(t))/250")
The differential equation is separable (and linear) and can be solved easily. The solution to the IVP is
This equation gives us the amount of salt in the tank
b) To determine when the concentration of salt in the tank reaches ")
Now, we need to solve for t when =0.04 \ \"kg/L\"")
The concentration of salt in the tank will reach 0.04 kg/L approximately at 
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=150
Newton’s Law of Cooling describes the rate at which an object’s temperature changes when it is exposed to a surrounding environment with a different, constant temperature. The fundamental principle is that the rate of change of temperature (/(dt)")


Here, 

This differential equation is separable (and linear), which has the solution
The negative sign in the exponent indicates that the temperature difference between the object and its surroundings decreases exponentially over time. This formula applies whether the object is initially hotter or cooler than the surroundings, depicting both cooling and warming processes under the law’s assumptions.
Consider a microprocessor that operates in an environment where the room temperature is constant at 25 ◦C. After a long period of operation, the microprocessor’s temperature is at 75 ◦C. Once the device is turned off, the microprocessor begins to cool down to room temperature. Suppose the characteristic cooling constant
Given information:



a) Plugging the given values into the solution to Newton’s Law of Cooling equation, Equation 2.5.1, gives the formula for ")
b) To find the temperature of the microprocessor 10 minutes after the device is turned off, plug in 
c) To find the time when the temperature is 35 ◦C, rearrange the formula when =35^@C")

It takes 23 minutes for the microprocessor to cool down to 35 ◦C.
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=150
The dynamics of falling objects represent a classic example of how differential equations model real-world situations. This phenomenon is directly connected to Newton’s Second Law of Motion, which states that the force acting on an object is equal to the mass of the object times its acceleration.
In this equation, the force may depend on time (


")
Solving this equation yields
The simplest model of a falling object applies Newton’s Second Law by considering gravity as the only force acting on the object. Here, the force due to gravity is, leading to the differential equation
where is the acceleration due to gravity, and the mass is assumed to be constant. This model assumes no air resistance and that the gravitational field is uniform. The approximate value of 



In reality, as an object falls, it encounters air resistance, which opposes the motion of the object. The net force on the object then becomes a combination of gravity and air resistance, modifying the equation to
where 
The force of air resistance is often proportional to the velocity of the object and thus 
As the object falls, air resistance increases with velocity until it balances the gravitational force. At this equilibrium point, the net force is zero, and the object no longer accelerates, reaching a constant velocity, known as terminal velocity.
Consider an object that has a mass of 25 kg and is initially moving downward with a velocity of -29 m/s. The object is falling through the atmosphere, which exerts a resistive force against its motion. This resistive force is proportional to the object’s velocity. Specifically, when the object’s velocity is 2 m/s, the resistive force is known to be 20 N. a) Write the differential equation that describes the motion of the object in terms of its velocity and time. b) Solve the differential equation to find the velocity of the object as a function of time, ")
Given information


a) Downward velocity is expressed as a negative value. Therefore, the upward direction is positive and the downward direction is negative.

Two primary forces acting on the object are gravity and air resistance. The force of gravity always acts downward, which we consider negative in our coordinate system, and is given by 
On the other hand, air resistance acts in the opposite direction of the object’s motion, providing an upward force when the object is falling downward. This force is represented as 
Combining these forces, the equation of motion is
we can use the information about the magnitude of air resistance to be 

Plugging in the values with initial condition =-29\ \"m/s\"")
b) This is a separable (and linear) differential equation. The general solution of the equation is
Applying the initial condition yields
c) The terminal velocity is

One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=150
Electrical circuits are integral to technological advancements, functioning based on the interplay of components such as resistors, inductors, and capacitors. In this section, we specifically discuss the application of first-order differential equations to analyze electrical circuits composed of a voltage source with either a resistor and inductor (RL) or a resistor and capacitor (RC), as illustrated in Fig. 2.5.1 Circuits containing both an inductor and a capacitor, known as RLC circuits, are governed by second-order differential equations, a topic we will revisit in the following chapter.
(a) (b)
(b) 
Figure 2.5.1 (a) RL Series circuit and (b) RC series circuit
Kirchhoff’s laws—current law and voltage law—form the foundational principles governing electrical circuits. Kirchhoff’s current law states that the total current entering a junction must equal the total current leaving, implying that the algebraic sum of currents in a node is zero. Kirchhoff’s voltage law asserts that the algebraic sum of all voltages around any closed loop in a circuit must equal zero.
Kirchhoff’s current law implies that the same current passes through all elements in circuits in Figure 2.5.1. To apply Kirchhoff’s voltage law, understanding the voltage drop across each component is crucial:
a) Ohm’s law dictates that the voltage drop 


b) Faraday’s law, complemented by Lenz’s law, describes that the voltage drop 
/(dt)")

c) The voltage drop 

In this section, we derive the mathematical model for an RL circuit as shown in Figure 2.5.1, while the model derivation for an RC circuit is left as an exercise. Consider ")
")
where /dt")
or in the standard form
To solve this linear differential equation. we use an integrating factor
The general solution for the current ")
With specific ")
Consider an RL circuit with a resistor of 

=sin(10t)\ V")
Given information:


=0 \ A")
a) Finding the current
The differential equation for an RL series circuit using Kirchhoff’s voltage law is
Plugging in the given values, we obtain
This is a first-order linear non-homogeneous differential equation.
Equation 2.5.3 gives the solution to this differential equation.
The right-hand side involves an integral with the exponential and sinusoidal terms that is typically solved using integration by parts. We only provide the final solution of the integral, leaving the detailed integration steps as an exercise for further exploration.
Which further simplifies to
Applying the initial condition yields
Therefore, the current is
b) Finding the voltage across the inductor
To find the voltage across the inductor, we first need to differentiate
Therefore, the voltage across the inductor is
c) Finding the voltage across the resistor
Similarly, the voltage across the resistor is found by
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=150
denote the quantity (kg) of salt at time (min). a) Write a differential equation for . b) Find the quantity of salt in the tank at time . c) Determine when the concentration of the salt in the tank will reach 0.1 kg/L. Round to the nearest minute.a)
b)
c) 146 min
denote the temperature, in Celsius, at time , in minutes. (a) Find the temperature of the fluid for  0" title="t > 0" class="asciimath mathjax">. (b) Find the temperature of the fluid 15 minutes after it is placed outside. Round your answer to two decimal places.
0" title="t > 0" class="asciimath mathjax">. (b) Find the temperature of the fluid 15 minutes after it is placed outside. Round your answer to two decimal places.a) =-30+165 (9/11)^t")
b) =-21.87^@C")
 has an initial downward velocity of
has an initial downward velocity of  . Assume that the atmosphere exerts a resistive force with a magnitude proportional to the speed. The resistance is when the velocity is
. Assume that the atmosphere exerts a resistive force with a magnitude proportional to the speed. The resistance is when the velocity is  . Use
. Use  . a) Write a differential equation in terms of the velocity , and acceleration
. a) Write a differential equation in terms of the velocity , and acceleration  . b) Find the velocity of the object.
. b) Find the velocity of the object.a)
b)  = -64-5e^(-5/32*t)")
 resistor and a
resistor and a  inductor is driven by the voltage
inductor is driven by the voltage =e^(4 t) \ V") . If the initial resistor current is
. If the initial resistor current is =0 A") , find the current
, find the current  , the voltages across the inductor and the resistor in terms of time . Find the current .
, the voltages across the inductor and the resistor in terms of time . Find the current .III
This chapter discusses linear second-order differential equations, a fundamental class of equations in the study of mathematics, physics, and engineering. It explores their structure and techniques for solving them and discusses how they model real-world systems such as mechanical vibratory systems and electrical circuits.
3.1. Homogeneous Equations: This section discusses homogeneous linear second-order differential equations, where there is no external forcing function. The general solution involves finding two linearly independent solutions, which form the foundation of all possible solutions.
3.2 Constant Coefficient Equations: This section focuses on constant coefficient homogeneous equations.
3.3. Non-Homogeneous Equations: This section explores nonhomogeneous equations, which model systems influenced by external forces or inputs.
The chapter proceeds to introduce various methods for solving equations with variable coefficients and nonhomogeneous structures.
3.4 Method of Undetermined Coefficients: This method is effective for non-homogeneous equations with constant coefficients.
3.5 Variation of Parameters: A versatile technique for more general cases.
3.6 Reduction of Order: Useful for finding a second solution when one solution is already known.
3.7 Cauchy-Euler Equation: Specifically for equations with variable coefficients in a particular form.
The chapter concludes by applying these concepts to physical and engineering scenarios.
3.8 Mechanical Systems: This section examines the behavior of spring-mass systems, including free, forced, damped, and undamped vibrations.
3.9 Electrical Circuits: This section discusses the analysis of RLC circuits, which incorporate a resistor, inductor, and capacitor.

Elbert Frank Cox, born in 1895 in Evansville, Indiana, holds a monumental place in history as the first African-American to earn a Ph.D. in mathematics. Overcoming the pervasive racial barriers of his time, Cox’s unwavering determination led him to earn his doctoral degree from Cornell University in 1925. His groundbreaking dissertation, “The Polynomial Solutions of the Difference Equation,” laid the foundation for significant advancements in the field of differential equations. Cox’s academic journey was not just a personal achievement but a beacon of inspiration, symbolizing the potential for extraordinary accomplishment despite systemic obstacles. After earning his Ph.D., he dedicated his life to education, teaching at historically black colleges and universities and mentoring the next generation of mathematicians. Elbert Frank Cox’s legacy transcends his mathematical contributions; it is a testament to resilience and intellectual brilliance in the face of societal challenges, paving the way for future scholars of diverse backgrounds.
A linear second-order differential equation takes the form:
Here, =0")
Unique Solution Theorem. If ")
Linear Combination Theorem. Suppose ")
")

The set of solutions,

Theorem on Linear Independence. If
Abel’s Theorem. If ")
Abel’s Theorem is a powerful tool for analyzing the solutions’ behavior across an interval, affirming that if the Wronskian is non-zero at one point and
Equivalence Theorem: For
is 
 is a fundamental set of solutions of the equation on is linearly independent on is nonzero at some point in is nonzero at all points in
is a fundamental set of solutions of the equation on is linearly independent on is nonzero at some point in is nonzero at all points in With these foundational theorems, we have the necessary tools to start solving homogeneous linear second-order differential equations and prepare for the complexities of non-homogeneous cases.
Two solutions to the differential equation 
")
")
a) Find the Wronskian of the solutions and determine if they are linearly independent.
b) Write the general solution to the differential equation.
c) Find the solution satisfying the initial conditions  = -5, \ y'(0) = -32")
a) To find Wronskian, we use Equation 3.1.3. We first need to find the first derivatives of the solutions


!=0")
The Wronskian =-e^(11t)")
b) Since the solutions are linearly independent, we can express the general solution to the differential equation as a combination of these solutions.
Here, 

c) We apply the initial conditions to find constants
Applying the initial condition to
Applying the initial condition to 
To determine
Solving the system yields

Therefore the solution to the initial value problem is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=167
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=167
") and
and ") . Determine if the functions are linearly independent for all real numbers.
. Determine if the functions are linearly independent for all real numbers.
=2 e^(1/3x)")
!=0")
 are
are ") ,
, ") .
.  = 2, \ y'(0) = -11") .
.
a)
b)
 are
are sin(4t)") ,
, cos(4t)") .
.  = -5, \ y'(0) = 9") .
.
a)
b)
We first consider the homogenous equation with constant coefficients:
To solve this, we recognize that a solution to this equation must have the property that its second derivative can be expressed as a linear combination of the first derivative and the function itself, suggesting that the solution form is ")
Since ")
Equation 3.2.2 is known as the auxiliary equation or characteristic equation (characteristic polynomial) of the homogeneous Equation 3.2.1. To determine the general solution of Equation 3.2.1, we solve for
The roots of the characteristic equation determine the nature of the solution, leading to three possible cases based on whether the roots are real and distinct, real and repeated, or complex conjugate.
The General Solution to the Second-Order Linear DE with Constant Coefficients
Case 1: Two Distinct Real Roots
If the characteristic equation (Equation 3.2.2) has two real roots 

")
")
Case 2: Repeated Root
If the characteristic equation has a repeated root ")
")
Case 3: Complex Conjugate Roots
If the characteristic equation has complex conjugate roots of the form 
(cos(betax)+-i sin (betax))")
In this form, ")
Find the general solution to the differential equation
The auxiliary equation is
The equation is factorable to
The roots are 

")
")
Solve the following initial value problem (IVP).

Finding the general solution:
The auxiliary equation is
The equation is factorable to
The roots are 

")
")
Applying the initial conditions:
Applying the initial condition to
Applying the initial condition to
To determine
Solving the system yields

Therefore the solution to the initial value problem is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=169
Find the general solution to the differential equation
The auxiliary equation is
The equation is factorable to
The equation has a repeated root 
")
")
Solve the following initial value problem (IVP).

Finding the general solution:
The auxiliary equation is
The equation is factorable to
The equation has a repeated root 
")
")
Applying the initial conditions:
Applying the initial condition to
Applying the initial condition to
Plugging in 

Therefore the solution to the initial value problem is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=169
Find the general solution to the differential equation
The auxiliary equation is
Using the quadratic formula, we obtain
)/2=")
The equation has complex conjugate roots with a real part 

Solve the following initial value problem (IVP).

Finding the general solution:
The auxiliary equation is
Alternative to using the quadratic formula that we used in the previous example, we can find the roots by completing the square. For variety, we use completing the square this time.
The equation has complex conjugate roots with a real part 

Applying the initial conditions:
Applying the initial condition to
Applying the initial condition to
=-e^(-x)(c_1 cos(5x)+c_2 sin(5x))+")
Plugging in 

Therefore the solution to the initial value problem is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=169



In this section, we explore the nonhomogeneous linear second-order differential equation of the form:
Uniqueness Theorem. If ")
To solve Equation 3.3.1, we first need the solutions to the associated homogeneous equation
We refer to Equation 3.3.2 as the complementary equation for Equation 3.3.1.
General Solution Theorem. 

Here 

The superposition principle is a powerful tool that allows us to simplify solving nonhomogeneous equations. It works by dividing the forcing function into simpler components, finding a particular solution for each component, and then adding those solutions together to form a complete solution to the original equation.
Theorem. If ")
and ")
Then for any constants 

+k_2y_(p2)")
Given =3x/2-9/4")

=e^(3x)/2")
")
")
=3x")
=10e^(3x)")
=12x-20e^(3x)")
Looking at the right-hand side of the equations, we notice that =4f_1(x)-2f_2(x)")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=172
=1/3 e^(-5 x)") is a particular solution to
is a particular solution to ") , and
, and  = -5/8x+15/32") is a particular solution to
is a particular solution to  , use the method of superposition to find a particular solution to
, use the method of superposition to find a particular solution to
=-2/15 e^(3x)") is a particular solution to
is a particular solution to ") , and
, and  = 1/20sin(2x)-1/40cos(2x)") is a particular solution to
is a particular solution to ") , use the principle of superposition to find a particular solution to
, use the principle of superposition to find a particular solution to
The method of undetermined coefficients is a technique for finding particular solutions,
To apply this method, we first identify the form of the forcing function 
Polynomial Forcing Functions: For 


Exponential Forcing Functions: For ")
")
")
")
Adjusting the Guess Based on Complementary Equation Solutions: If the complementary equation has a solution matching part of = (3x-2)e^(4x)")
e^(4x)")
xe^(4x)")
x^2e^(4x)")
Note that we use 
Find the general solution to the following equation.
/(dx^2) + 10(dy)/(dx) +25y = 3e^(-2 x)")
Finding the complementary solution:
While it’s not necessary to know the complementary solution to find the particular solution, knowing it is beneficial. Understanding the complementary solution helps us make better initial guesses for the particular solution and adjust them accordingly before we proceed with the algebra needed to determine the undetermined coefficients.
The auxiliary equation associated with the complementary equation is 
,xe^(-5x)}")
Guessing the form of the particular solution:
Since
Plugging in the guess into the equation to find A:
Next, we plug in the guess and its derivatives into the differential equation to determine the undetermined coefficient A.
")
")
Therefore, the particular solution to the differential equation is
Finding the general solution:
The general solution of a nonhomogenous equation is

where
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=174
Find the general solution to the following equation.
/(dx^2) + 10(dy)/(dx) +25y = e^(-5 x)")
Finding the complementary solution:
The complementary equation is similar to the one in Example 3.4.2. Thus, +c_2xe^(-5x)")
Guessing the form of the particular solution:
Our initial guess is ")

Plugging in the guess into the equation to find A:
Next, we plug in the guess and its derivatives into the differential equation to determine the undetermined coefficient A.
")
 (2x-5x^2)")
(25x^2-20x+2)+")
 (2x-5x^2)+")
Factoring the exponential term and collecting the like terms yields
Therefore, the particular solution to the differential equation is
Finding the general solution:
The general solution is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=174
Solve the following initial value problem.
/(dx^2) + 10(dy)/(dx) +25y = e^(-5 x),")
=2,\ y'(0)=-3")
Finding the general solution:
The equation is similar to the one in Example 3.4.3. Therefore, the general solution is
Applying the initial conditions:
Applying the initial condition to
Applying the initial condition to
Plugging in 

Therefore, the solution to the initial value problem is
Note that the initial conditions must satisfy the entire solution of the nonhomogeneous equation, not just the complementary part. Therefore, we apply the initial conditions directly to the general solution of the given nonhomogeneous equation to determine the constants.
The following section summarizes the appropriate forms of guesses for various types of forcing functions and explains how to modify these guesses if any part of the forcing function
)To find a particular solution to the differential equation
| |
Guess |
") degree polynomial degree polynomial |
x^(n-1)+...+A_1x+A_0") |
") |
") |
") |
+Bsin(betax)") |
") |
|
+bsin(betax)") |
|
Remarks
1. Exponential and Polynomial Products: If
2. Complex Roots: If 
3. Exponential and Trigonometric/Polynomial Products: If
4. Polynomial and Trigonometric Products: If
Find the form of a particular solution to
where
a) ")
")
 cos(8x)")
")
The auxiliary equation associated with the equation is 
a)
b) This function contains the product of polynomials (second degree) and trig functions. Using Remark 4, first, we guess the polynomial and multiply it by the proper cosine. We then add it to the product of another guessed polynomial with different coefficients and a sine.
c) This function contains the product of exponential, polynomial (first degree), and trig functions. Using Remarks 3 and 4, first, we guess the polynomial and multiply it by the proper cosine. We then add it to the product of another guessed polynomial with different coefficients and a sine. Finally, we multiply the exponential part.
d) Since 
")
")
e) This function contains the product of exponential and polynomial (second degree). Using Remark 3, first, we guess the polynomial and multiply the exponential part. The polynomial guess will be 
")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=174
")
")

The method of variation of parameters is another technique used to find particular solutions to nonhomogeneous linear differential equations. It is especially useful for equations with both constant and variable coefficients and is applicable when the forcing function,
Unlike the method of undetermined coefficients where the complementary solution aids in guessing the form of the particular solution, variation of parameters requires the complementary solution to determine the particular solution.
We first focus on applying the method of variation of parameters to nonhomogeneous constant-coefficient equations. Consider the nonhomogeneous linear second-order equation
Let ")
")
We aim to substitute 

Since we have more parameters than we have equations, we impose that 

We then find 
After substituting
)_(=0) + u_2 underbrace((ay_2''+by_2'+cy_2 ))_(=0) +")
The expressions multiplied by
)/a")
Combining (i) and (ii) yields a system of equations
Solving the system for 

 y_2)/(a(y_1 y_2'- y_1' y_2))")
Notice that the term in the parenthesis in the denominator is the Wronskian (
 y_2)/(a W(y_1,y_2))")
To find a particular solution to Equation 3.5.1,
1. Find a Solution to the Homogeneous Equation: Determine a fundamental set of solutions
2. Determine
 y_2)/(a W(y_1,y_2)) dx")
3. Construct the Particular Solution: Combine
Find a particular solution to
To find a particular solution using the method of variation of parameters, we should first find a solution to the associated homogeneous equation:
1. The characteristic polynomial of the complementary equation 
So the solution is a repeated root ")
The Wronskian of the fundamental set is
2. Next substituting =e^(-3x)arctan(x)")
=e^(-6x)")
Finding
This integral can be evaluated using the technique of integration by parts.
Finding
This integral can be evaluated using the technique of integration by parts.
Since we only need one particular solution, we set the constant of integrations to zero in
3. We substitute
 +1/2(x-arctan(x)) )e^(-3x)+")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=176
Find (a) a particular and then (b) a general solution to
a) To find a general solution, we first need to find a particular solution. To find a particular solution using the variation of parameters method, we should first find a set of fundamental solutions to the associated homogenous equation:
1. The characteristic polynomial of the complementary equation 
So the solutions are 

")
")
2. Next we find =1/(e^x+1)")
=-e^(-3x)")
 e^(-2x))/(-e^(-3x)) dx")
 dx")
and
 e^(-x))/(-e^(-3x)) dx")
/(1+e^x) dx")
Since we only need one particular solution, we take both constants of integration as zero for simplicity.
3. We substitute
b) To find a general solution we add the general solution to the homogeneous equation and a particular solution:
+c_2e^(-2x)+")
Notice that the terms ")
")
e^(-x)")

=c_3e^(-x)+c_2e^(-2x)")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=176
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=176
Having discussed solving homogeneous and nonhomogeneous second-order differential equations with constant coefficients, we now turn our attention to equations where the coefficients are functions of the independent variable. The method of variation of parameters is suitable for such equations.
For a differential equation of the form
valid solutions are expected on an open interval where all four governing functions, , \ a_1(x),\ a_0(x)")
")
Existence and Uniqueness Theorem: If 

")
y'+q(x)y=f(x),")
The methodological steps for variable-coefficient equations mirror those for constant coefficients except the equation should be in the standard form.
Method of Variation of Parameters for Variable-Coefficient Equations
1. Standardize the equation: Divide the equation by the coefficient of
2. Linearly Independent Solutions: Find two linearly independent solutions,
3. Determine 

 y_2)/(W(y_1,y_2)) dx")
4. Construct the Particular Solution: Combine
Find a particular solution to the following differential equation given  = x^2")
 = x^-1")
1. First, divide the equation by the coefficient of
, \ \(xgt0)")
2. To find a particular solution using the method of variation of parameters, we need a fundamental set of solutions to the associated homogeneous equation. the provided solutions
The Wronskian of the solution set is
The Wronskian is never zero. Therefore, the solution set is the fundamental solution set.
3. Next substituting 

=x^-1(1+3x^2)")
=-3")
Finding
Letting 
Finding
Letting
4. Substitute
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=176
. or for variable-coefficient equations.
and satisfy the corresponding homogeneous equation.
The method of Reduction of Order is a technique for finding a second solution to a second-order linear differential equation when one solution is already known. It is useful for both homogeneous and nonhomogeneous equations.
Generally, to apply the reduction of order method for the nonhomogeneous equation
we assume the second solution 


We can then solve this first-order differential equation using standard techniques, integrate it to find
For a homogeneous equation with a known solution
1. Standardize the equation: Divide the equation by the coefficient of
2. Determine ")
3. Find the second Solution
4. Form the General Solution: The general solution is then a combination of both solutions.
Note that constant
Given  = e^(2 x)")
1. First, standardize the equation by dividing it by the coefficient of
2. Identify

=e^(-int p(x)dx)=e^(4int (x+1)/xdx)")
)=x^4e^(4x)")
3. The second solution is given by
We are looking for the simplest ")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=178
While primarily detailed for homogeneous equations, its principles apply to nonhomogeneous situations by initially solving the associated homogeneous equation and then finding a particular solution using the standard methods discussed for nonhomogeneous equations.
Given  = x")
a. Finding the second solution of the complementary equation:
We follow the steps for the reduction of orders method to find the second linearly independent solution to the complementary equation.
1a. First, standardize the equation by dividing it by the coefficient of
2a. Identify

=e^(-int p(x)dx)=e^(-int x^-1dx)")
)=x^-1")
3a. The second solution is given by
4a. The general solution to the complementary equation is
Constant 
b. Finding a particular solution of the nonhomogeneous equation:
We use the method of variation of parameters to find the particular solution
1b. Standardize the original differential equation.
2b. The solutions to the homogeneous equation are now known: 
The Wronskian of the fundamental set is
3b. Next substituting =x^-2(x^2+1)")
=-2x^-1")
Finding
Finding
4b. Substitute
c. Finding the General Solution
The general solution to the nonhomogeneous equation is the sum of the particular solution and complementary solution.
d. Applying the initial conditions
Applying the initial condition to
Applying the initial condition to
To determine
Solving the system yields

Therefore the solution to the initial value problem is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=178
 = e^(4 x)") is a solution to the given equation, use the Method of Reduction of Order to find a second solution.
is a solution to the given equation, use the Method of Reduction of Order to find a second solution.
satisfies the complementary equation.
satisfies the complementary equation.
The Cauchy-Euler equation, also known as the Euler-Cauchy equation or simply Euler’s equation, is a type of second-order linear differential equation with variable coefficients that appear in many applications in physics and engineering. These equations are particularly noteworthy because they have variable coefficients that are powers of the independent variable.
A second-order Cauchy-Euler equation is generally of the form:
Here 


To solve a homogeneous Cauchy-Euler Equation 3.7.1,
1. Substitute and Transform: Let 
")
x^(r-2)")
x^r+brx^r+cx^r=0")
+br+c=0")
which yields the characteristic equation.
2. Solve the Characteristic Equation: Similar to the equations with constant coefficients, we solve the quadratic equation for
Case 1: Two Distinct Real Roots
The general solution will be the linear combination of ")
")
Case 2: Repeated Root
The general solution will be the linear combination of 

Case 3: Complex Conjugate Roots
The general solution will be the linear combination of  cos(beta lnx)")
 sin(beta lnx)")
Solve the initial value problem

The equation is Cauchy-Euler.
1. So first we find its characteristic polynomial given 


The equation has a repeated root
2. Therefore, the general solution of the equation is
3. We use the initial values to find
^4+c_2(1)^4ln(1)=-4")
^3+4c_2(1)^3ln(1)+c_2(1)^3=-1")
Therefore, the solution to the IVP is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=180
For a nonhomogeneous Cauchy-Euler equation, the method of variation of parameters or undetermined coefficients (if applicable) is used.

As we progress from first-order to second-order ordinary differential equations, we encounter a variety of applications that can be modeled by these higher-order equations. In this section and next, we focus on mechanical vibrations and electrical circuits (RLC circuits) as two primary areas where second-order differential equations are extensively applied. These areas are fundamental in engineering and physics, providing rich contexts for understanding dynamic system behavior.
Studying mechanical vibrations is crucial for designing and analyzing systems that experience oscillatory motion. Understanding vibrations helps engineers reduce noise, prevent catastrophic failure due to resonance, and optimize the performance of various mechanical systems ranging from buildings and bridges to vehicle suspensions and electronic components. Modeling these systems allows engineers to predict responses to various stimuli, ensuring safety and functionality.
To model a vibratory system, we often use a simplified representation involving masses, springs, and dampers. These elements capture the essential dynamics of more complex real-world systems. Using Newton’s laws of motion or energy methods, we develop a mathematical model that typically results in a second-order differential equation.
This system consists of a mass, typically denoted as 

")
 when unstretched. When we attach a mass to the spring, it stretches by a length
when unstretched. When we attach a mass to the spring, it stretches by a length  . This point where the mass comes to rest and the spring ceases to stretch further is known as the equilibrium position. At this point, the system is stable, and the mass hangs motionless until disturbed. In this system, we define as the displacement of the mass from its equilibrium position, where positive values indicate upward movement.
. This point where the mass comes to rest and the spring ceases to stretch further is known as the equilibrium position. At this point, the system is stable, and the mass hangs motionless until disturbed. In this system, we define as the displacement of the mass from its equilibrium position, where positive values indicate upward movement.
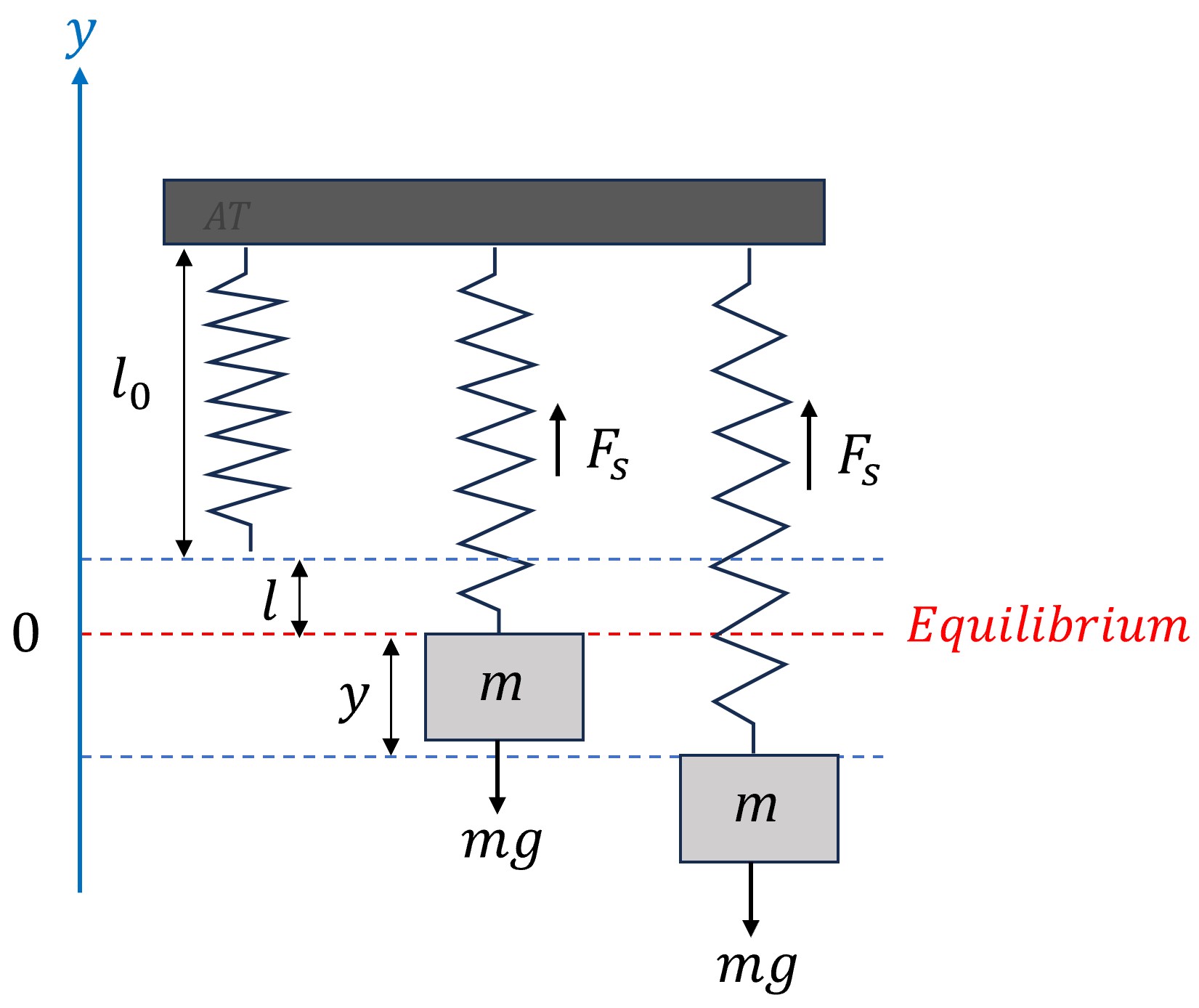
To derive the equation governing the motion of a spring-mass-damper system, we apply Newton’s second law of motion, which relates the net force acting on the mass to its acceleration. The primary forces acting on the mass in a spring-mass system include:
 acting downward.
acting downward.") , where is the spring constant. This force is governed by Hooke’s law and is typically proportional to the displacement from the spring’s natural length () and opposite in direction.
, where is the spring constant. This force is governed by Hooke’s law and is typically proportional to the displacement from the spring’s natural length () and opposite in direction. , where is the damping coefficient. If present, the damping force is proportional to the velocity of the mass and acting in the opposite direction of motion.. It includes any external force acting on the system, which might be periodic or random, leading to forced vibrations.
, where is the damping coefficient. If present, the damping force is proportional to the velocity of the mass and acting in the opposite direction of motion.. It includes any external force acting on the system, which might be periodic or random, leading to forced vibrations.According to Newton’s second law,
Substituting all the forces and writing acceleration as the second derivative of displacement yields
At equilibrium, the sum of all forces acting on the mass equals zero. Therefore,
Simplify the equation by incorporating 
Here, =y_0")
=y'_0")
Depending on which forces act on the system, there are several special cases:
=0") ): The simplest form of vibration occurs when there is no damping and no external force. The system oscillates at its natural frequency, determined by the mass and spring constant.
): The simplest form of vibration occurs when there is no damping and no external force. The system oscillates at its natural frequency, determined by the mass and spring constant.=0") ): When damping is present but there is no external force, the system experiences damped vibrations leading to a gradual decrease in oscillation amplitude over time. The nature of the damping (underdamped, critically damped, or overdamped) depends on the values of , , and .
): When damping is present but there is no external force, the system experiences damped vibrations leading to a gradual decrease in oscillation amplitude over time. The nature of the damping (underdamped, critically damped, or overdamped) depends on the values of , , and .ne0") ): When an external force acts on the system, the system experiences forced vibrations. If the frequency of the external force is close to the system’s natural frequency, resonance can occur, leading to large amplitude oscillations.
): When an external force acts on the system, the system experiences forced vibrations. If the frequency of the external force is close to the system’s natural frequency, resonance can occur, leading to large amplitude oscillations.ne0") ): This is the most general case, combining the effects of damping and external forcing, leading to complex oscillatory behavior.
): This is the most general case, combining the effects of damping and external forcing, leading to complex oscillatory behavior.The simplest form of vibration occurs when there is no damping (
=0")

This equation is a homogeneous second-order linear differential equation. By solving the characteristic equation 
The term ")

It is often convenient to represent the displacement in the amplitude-phase form with a single trigonometric function
Here ")


=c_1/R=c_1/(sqrt(c_1^2+c_2^2))")
=c_2/R=c_2/(sqrt(c_1^2+c_2^2))")
The motion described by Equation 3.8.4 is known as simple harmonic motion, characterized by its sinusoidal nature and constant frequency. The period of the motion is /(omega_0)")
is typically given as  , and lengths should be in meters with mass in kilograms. In the Imperial system, is about
, and lengths should be in meters with mass in kilograms. In the Imperial system, is about  , with lengths in feet and mass in slugs. in the interval
, with lengths in feet and mass in slugs. in the interval ") ensures a unique solution within one complete cycle. The signs of and determine the quadrant in which lies.
ensures a unique solution within one complete cycle. The signs of and determine the quadrant in which lies.
 , is in the first quadrant
, is in the first quadrant , is in the second quadrant.
, is in the second quadrant. , is in the third quadrant.
, is in the third quadrant. , is in the fourth quadrant.
, is in the fourth quadrant.
A 150 cm long vertical spring hangs from a fixed ceiling. A 2-kg object is attached to the lower end of the spring, and the length of the spring becomes 155 cm where the object is in equilibrium. The object is then pulled down an additional 3 cm and released with an initial upward velocity of 20 cm/s. Assuming no damping and no external forces other than gravity are acting on the system:
a) Find the displacement of the object as a function of time.
b) Determine the natural frequency, period, amplitude, and phase angle of the motion.
c) Rewrite the equation of motion in the amplitude-phase form  = R cos(omega_0 t - phi)")
Express your answers in the cgs unit where 
Given information:



=-3 \ \"cm\"")
=20\ \"cm\"//\"s\"")
a)
Calculating the spring constant
At equilibrium, the forces acting on the object are balanced, meaning 

Calculating the natural frequency:
The natural frequency is
It is important to note that to find
Finding the general solution:
Given there is no damping force and an external force, the initial value problem is

=-3,")
The general solution to this equation is given by Equation 3.8.3.
Applying the initial conditions:
The equation of the object displacement is then
b)
Natural frequency:
Period:
Amplitude
Phase angle:
The reference phase angle is determined by
Since 
lt0")

gt0")

c) The equation of motion can be written as
The graph of the displacement is shown for the first 7 seconds.

One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=182
In free, damped vibration, there is no external force (
This equation is a homogeneous second-order linear differential equation. By solving the characteristic equation 
Depending on the discriminant 
1. Critically damped (
In this case, there is a repeated root ")
The motion in this case is said to be critically damped as the damping is just enough to prevent oscillation. This level of damping is achieved when the damping coefficient
")
")
It is important to note that as time progresses (
")
2. Overdamped (
In this case, there are two real distinct roots =(-c+-sqrt(c^2-4mk))/(2m)")
Given both ")
3. Underdamped (
In this case, the roots of the characteristic equation are complex conjugates given by
Thus the solution to the differential Equation 3.8.5 is
The term )/(2m)")
Here again
=(c_1)/R")
An underdamped system is characterized by a damping coefficient ")
t)")
")
Such behavior is often preferred in various applications. In musical instruments, for example, the underdamped vibrations of strings or membranes contribute to a sustained, resonant sound. Similarly, seismic dampers in buildings employ a controlled underdamped response to safely dissipate energy from earthquakes, allowing structures to sway and reduce stress without collapsing.
A 1-kg mass is attached to a string with a stiffness of 64 N/m and a dashpot with a damping constant 16 N.s/m. The object is compressed 20 cm above its equilibrium and released with an initial upward velocity of 2 m/s. Find the displacement of the object as a function of time.
Given information:



=20 \ \"cm\"=")

=2\ \"m\"//\"s\"")
The initial value problem for this system is

=0.2,")
Before solving the IVP, we can calculate the critical damping coefficient to determine the type of damping.
The damping coefficient equals the critical damping coefficient (=16")
Finding the general solution:
The general solution for a critically damped system is given by Equation 3.8.6.
Applying the initial conditions:
The equation of the object’s displacement is then
The graph of the displacement is shown for the first 3 seconds. As expected, the system smoothly and quickly returns to its equilibrium position without oscillation.

One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=182
Find the displacement of the object in Example 3.8.2, if the spring is now attached to a dashpot with a damping constant 34 N.s/m.
Given information:

The initial value problem for this system is

In the previous example, we determined the critical damping coefficient to be =16")

Finding the general solution:
The characteristic equation for the differential equation has two distinct real roots.

The general solution to an overdamped system is given by Equation 3.8.7.
Applying the initial conditions:
Solving the system for constants
The equation of the object’s displacement is then
The below graph displays the displacement for the first 3 seconds. It confirms that the system gradually returns to its equilibrium position smoothly and without any oscillation. When compared to the critically damped system in Example 3.8.2, this overdamped system takes a longer time to settle down. This slower behavior underscores that the increased damping force in the overdamped system delays the return to equilibrium.

One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=182
Find the displacement of the object in Example 3.8.2, if the spring is now attached to a dashpot with a damping constant 4 N.s/m.
Given information:

The initial value problem for this system is

In Example 3.8.2, we determined the critical damping coefficient to be =16")
Finding the general solution:
The characteristic equation for the differential equation has complex conjugates.
The general solution to an underdamped system is given by Equation 3.8.8.
Applying the initial conditions:
=e^(-2t)(-2c_1cos(2sqrt(15)t)-2c_2sin(2sqrt(15)t)-")
The equation of the object’s displacement is then
The amplitude-phase form of the equation is
The graph illustrates the displacement of the system over the initial 3 seconds. This underdamped system lacks enough damping to stop oscillations, leading to a pattern of diminishing swings around the equilibrium position. These oscillations decrease in amplitude for approximately 2 seconds before the system finally settles at the equilibrium position.

One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=182
Forced undamped vibration occurs in systems subject to a continuous external force, typically modeled as a periodic function like =F_0 cos(omega t)")
=F_0 sin(omega t)")
The solution to the differential equation is
Here, the solution comprises a complementary part ")
")

To determine the particular solution, we typically use methods like undetermined coefficients or variation of parameters. As we seek the particular solution, depending on the driving frequency omega, we consider two cases:
1. Non-Resonant (
=Acos(omegat)+Bsin(omegat).")
To find the specific values of the coefficients A and B, we use the method of undetermined coefficients. After determining these coefficients, the particular solution can be expressed as
and the general solution is
=F_0/(m(omega_0^2-omega^2))cos(omega t)+")
+c_2sin(omega_0t)")
The displacement function consists of sine and cosine components with bounded amplitude.
2. Resonant (
=t(Acos(omegat)+Bsin(omegat))")
using the method of undetermined coefficients and after determining the coefficients, the particular solution can be expressed as
The general solution is then
In this case, the particular solution includes a time factor
The amplitude of oscillation in forced vibration is sensitive to the relationship between the driving frequency and the natural frequency of the system. As the driving frequency approaches the natural frequency, the amplitude increases, peaking at resonance. This sensitivity is a key factor in designing structures and systems to ensure their natural frequencies are not aligned with frequencies of common environmental forces, like wind or traffic. Such alignment could trigger resonance, risking structural integrity.
On the other hand, there are specific applications where inducing resonance is advantageous, for instance, in mechanical filters and sensors, where resonance can enhance sensitivity or signal strength.
A 32 lb object is suspended from a spring, stretching it by 6 inches to reach equilibrium. This undamped system is subjected to an external force  = 2cos(8t)")
Given information:


 = 2 cos(8t)")
=-3\ \"in\"=")

=1\ \"ft\"//\"s\"")
Calculating the spring constant
In the British system, weight is typically measured in pounds. To find the spring constant, we first convert weight to mass using the formula
At equilibrium

Calculating the natural frequency:
The natural frequency is
Alternatively, if the system resonates at a driving frequency of 

Finding the general solution:
The initial value problem for this system is
,")
=-0.25,")
The general solution for a system undergoing resonance is given by Equation 3.8.11.
=2/(2(1)(8))t sin(8 t)+c_1cos(8t)+c_2sin(8t)")
=1/8t sin(8 t)+c_1cos(8t)+c_2sin(8t)")
Applying the initial conditions:


The equation of the object’s displacement is then
=1/8t sin(8 t)-1/4cos(8t)+1/8sin(8t)")
We can write the complementary solution in the amplitude-phase form, combining the last two terms.
The graph shows how the system’s displacement changes during the first 10 seconds. Since the particular solution includes a time factor (t), the displacement’s amplitude tends to become infinitely large as time progresses towards infinity. However, in reality, most systems experience some damping. Even a small amount of damping can significantly affect the system’s amplitude and behavior, especially around resonance frequencies, preventing the unlimited growth in amplitude predicted by ideal models.

One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=182
This is the most general case, combining the effects of damping and external forcing. The motion of such a system is governed by
The solution to the differential equation is the sum of complementary and particular solutions.
The complementary solution is the solution to the free, damped behavior, while the particular solution is found using the method of undetermined coefficients or variation of parameters.
Based on our understanding of free-damped vibrations, we know that as time progresses toward infinity, the complementary solution approaches zero. Consequently, the system’s displacement increasingly reflects the behavior of the particular solution. Therefore, in vibrational analysis, the complementary solution is commonly referred to as the transient solution, reflecting the initial response, while the particular solution is known as the steady-state solution, indicating the ongoing response to the external force.
Find the displacement of the object in Example 3.8.5, if the system is now attached to a dashpot with a damping constant 34 lb.s/ft.
Given information:

In the previous example, we determined the spring constant: 
,")
Given the characteristic equation has distinct real roots 

Finding the particular solution:
To find the particular solution, we use undetermined coefficients. Given the forcing cosine function, we guess the form of the particular solution to be
The derivatives are
Substituting
-64Bsin(8t)+20(-8Asin(8t)+8Bcos(8t))")
Simplifying it gives
By matching coefficients of sine and cosine terms, we get


Therefore, the particular solution is
Combining the particular and complementary solutions gives the general solution
=1/80sin(8t)+")
Applying the initial conditions:
Solving the system, we find the constants to be
The equation of the object’s displacement is then
=1/80sin(8t)-")
The graph depicts the change in the system’s displacement over the first 6 seconds. Initially, for about the first second, the displacement is primarily influenced by the complementary solution, reflecting the transient phase. After this initial period, the displacement increasingly aligns with the periodic particular solution, representing the steady-state behavior of the system.

One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=182
where 





 = c_1 cos(omega t) + c_2 sin(omega t)")
a) 
b)
 object is attached to a spring with spring constant
object is attached to a spring with spring constant  . It is also attached to a dashpot with damping constant
. It is also attached to a dashpot with damping constant  . The object is initially displaced
. The object is initially displaced  above equilibrium and released. a) Find its displacement for 0" title="t > 0" class="asciimath mathjax">. b) Describe the motion.
above equilibrium and released. a) Find its displacement for 0" title="t > 0" class="asciimath mathjax">. b) Describe the motion.
a)
b) Free underdamped vibration
 object is attached to a spring with spring constant
object is attached to a spring with spring constant 
 . It is also attached to a dashpot with damping constant
. It is also attached to a dashpot with damping constant 
 . The object is pulled down
. The object is pulled down  and released with an initial upward velocity of . Find the displacement of the object. Assume displacement and velocity are positive upward.
and released with an initial upward velocity of . Find the displacement of the object. Assume displacement and velocity are positive upward.
In Section 2.5F, we explored first-order differential equations for electrical circuits consisting of a voltage source with either a resistor and inductor (RL) or a resistor and capacitor (RC). Now, equipped with the knowledge of solving second-order differential equations, we are ready to delve into the analysis of more complex RLC circuits, which incorporate a resistor, inductor, and capacitor.
Previously, we established that:
across a resistor is proportional to the current I flowing through it, expressed as , where is the resistance. across an inductor is proportional to the rate of change of current, given as , where is the inductance. across a capacitor is proportional to the electric charge  stored on it, represented as , with being the capacitance
stored on it, represented as , with being the capacitance
Figure 3.9.1 Schematic of an RLC series circuit
With these foundations, consider
Substituting
Differentiating this equation with respect to time and substituting /dt")
/(dt^2)+R (dI)/dt+1/CI=(dE)/dt")
Alternatively, Equation 3.9.1 can be expressed in terms of charge ")
/(dt^2)+R(dq)/(dt)+1/Cq=E(t)")
Given ")
Consider an RLC series circuit with a resistor of 


=0.1sin(10t)\ \"V\"")
Given information:



=0 \ \"A\"")
=I'(0)=0 \ C")
The differential equation for an RLC series circuit is given by Equation 3.9.1.
The initial value problem is then
/(dt^2)+0.06 (dI)/dt+89/50I=cos(10t),")
Multiplying the equation by 100, we get
/(dt^2)+6 (dI)/dt+178I=100cos(10t),")
Given the characteristic equation has complex conjugates =-3+-13i")
Finding the particular solution:
To find the particular solution, we use undetermined coefficients. Given the forcing cosine function, we guess the form of the particular solution to be
The derivatives are
Substituting 
-100Bsin(10t) +6(-10Asin(10t)+10Bcos(10t) )")
+Bsin(10t))=")
Simplifying gives
By matching coefficients of sine and cosine terms and solving the system of two equations in unknowns 

Therefore, the particular solution is
Combining the particular and complementary solutions gives the general solution
=650/807cos(10t)+500/807sin(10t) +")
Applying the initial conditions:


The equation of the object’s displacement is then
As with forced mechanical vibration scenarios, the current in an RLC circuit is composed of two distinct parts: the transient current, represented by the complementary solution that diminishes to zero as time progresses to infinity, and the steady-state current, described by the particular solution which is sinusoidal and persists over time.
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=184
 resistor, a
resistor, a  inductor, and a
inductor, and a  capacitor driven by the voltage
capacitor driven by the voltage  = 0.06sin(3t)V") . a) Write the differential equation associated with this circuit in terms of current . b) If the initial charge and initial current on the capacitor are both zero, find the current and the voltages across the resistor in terms of time .
. a) Write the differential equation associated with this circuit in terms of current . b) If the initial charge and initial current on the capacitor are both zero, find the current and the voltages across the resistor in terms of time .
a)
b) =0.0205 e^(-31t)-0.1071 e^(-3t)+")
c) =0.34(0.0205 e^(-31t)-0.1071 e^(-3t)+")
 resistor, a inductor, and a
resistor, a inductor, and a  capacitor driven by the voltage
capacitor driven by the voltage  = 0.09t^2\ V") . a) Write the differential equation associated with this circuit in terms of current . b) If the initial charge and initial current on the capacitor are both zero, find the current .
. a) Write the differential equation associated with this circuit in terms of current . b) If the initial charge and initial current on the capacitor are both zero, find the current .
a)
b)
IV
This chapter focuses on the Laplace Transform, an integral operator widely used to simplify the solution of differential equations by transforming them into algebraic equations in a different domain.
4.1 Definitions: This section introduces the concept and integral operator of the Laplace Transform.
4.2 Properties of Laplace Transform: This section discusses key properties of the Laplace Transform, essential for efficient function transformation and manipulation.
4.3 Inverse Laplace Transform: This section covers the process of converting functions back from the Laplace domain to the original domain, known as the inverse Laplace Transform.
4.4 Solving Initial Value Problems: This section demonstrates the application of the Laplace Transform and its inverse in solving initial value problems (IVP).
4.5 Laplace Transform of Piecewise Functions: This section explores the application of the Laplace Transform to piecewise continuous functions, using tools like the Heaviside (Unit Step) function.
4.6 Initial Value Problems with Piecewise Forcing Functions: This section discusses solving IVPs for second-order differential equations with constant coefficients and piecewise continuous forcing functions.
4.7 Impulse and Dirac Delta Function: This section introduces the Dirac Delta function and its application in solving differential equations with impulse forcing functions, which are characterized by high magnitudes over very short intervals.
4.8 Table of Laplace Transform: This section provides a table summarizing the Laplace Transform and some of its properties for quick reference.

Oliver Heaviside, born in 1850 in Camden Town, London, was a self-taught electrical engineer, mathematician, and physicist whose unconventional approach to academia did not hinder his profound impact on the field. Largely self-educated due to financial constraints, Heaviside pursued his interest in electromagnetic theory, making substantial contributions that were both innovative and contentious at the time. His most significant achievement was the development of operational calculus, a powerful tool in the application of differential equations to physical problems, particularly in the field of electrical engineering. Heaviside’s methods simplified Maxwell’s complex equations of electromagnetism, making them more accessible and practically applicable, a feat that had a lasting impact on telecommunications and electrical engineering. Despite facing criticism and limited recognition during his lifetime, Heaviside’s work was later acknowledged as groundbreaking, influencing not only the theoretical underpinnings of electrical engineering but also the practical aspects of signal transmission and circuit design. Oliver Heaviside’s story is one of perseverance and brilliance, showcasing how a relentless pursuit of knowledge can lead to discoveries that shape the world, irrespective of the conventional academic path.
In this section, we delve into an integral operator known as the Laplace Transform. This powerful tool is employed to convert initial value problems described by differential equations in one domain (e.g., t domain) into algebraic equations in another domain (s domain). Doing so facilitates a more efficient solution process, particularly for linear differential equations with constant coefficients and discontinuous or impulsive forcing terms. For instance, consider an initial value problem in the time domain
t-Domain: +5y(t)=f(t),")
Applying the Laplace Transform, the differential equation is transmuted into an algebraic equation in the s domain:
s-Domain: -10+5Y(s)")
This algebraic representation in the s domain is often simpler to solve, and the solution can then be transformed back to the original t domain.
Let ")
")


The Laplace transform of 
harrF(s)")
The improper integral in the definition 4.1.1 is more precisely defined as
f(t)dt")

The integral converges, meaning it results in a finite number when this limit exists and is finite.
Find the Laplace transform of the constant function =2")
Substituting =1")
=int_0^ooe^(-st)(2)dt")




Note that the integral diverges for 
")



=2/s")

In general, the Laplace transform of the constant function =C")

Find the Laplace transform of function=e^(at)")
Substituting
=int_0^ooe^(-st)(e^(at))dt")




Note that the integral diverges for 

=1/(s-a)")
harr1/(s-a)")
In practice, while the definition of the Laplace Transform involves an integral, it is rarely computed directly via integration due to the complexity and time-consuming nature of the process. Instead, we typically use precomputed tables of Laplace Transforms. These tables list common functions and their corresponding transforms, allowing for quick and accurate application of the Laplace Transform to solve differential equations and analyze systems. Table 4.1.1 includes the Laplace Transform of some common functions. A more comprehensive table can be found in Section 4.8.
Table 4.1.1: Brief Table of Laplace Transform
| |
=") |
Domain of |
|
 |
0" title="s>0" class="asciimath mathjax"> |
| |
 |
0" title="s>0" class="asciimath mathjax"> |
  |
/s^(n+1)") |
0" title="s>0" class="asciimath mathjax"> |
") |
") |
a" title="s>a" class="asciimath mathjax"> |
,") |
/(s-a)^(n+1)") |
a" title="s>a" class="asciimath mathjax"> |
") |
") |
0" title="s>0" class="asciimath mathjax"> |
") |
") |
0" title="s>0" class="asciimath mathjax"> |
sin(bt)") |
^2+b^2)") |
a" title="s>a" class="asciimath mathjax"> |
cos(bt)") |
/((s-a)^2+b^2)") |
a" title="s>a" class="asciimath mathjax"> |
") |
") |
 b" title="s>b" class="asciimath mathjax"> b" title="s>b" class="asciimath mathjax"> |
") |
") |
b" title="s>b" class="asciimath mathjax"> |
Use the table of Laplace Transform to determine the Laplace Transform of the following function:
a)
b)
a) From the table
}")
")
Recognizing that 
}")
")

b) From the table
}")
")
Recognizing that 
}")
")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=210
, of the function  = e^(4t) , quad t gt 0") .
.
, of the function  = cos(4t) , quad t gt 0") .
.
=6 cosh(2 t)")
 .
.
Understanding the properties of the Laplace Transform is crucial as it provides tools for efficiently transforming and manipulating functions. These properties greatly simplify the analysis and solution of differential equations and complex systems.
The Laplace transform exists for any function that is (1) piecewise-continuous and (2) of exponential order (i.e., does not grow faster than an exponential function). A function |<=Me^(at),")

=e^(7t)cos(4t)")
=e^(t^3)")
The Laplace Transform adheres to the principle of linearity. Let 


This property is useful when dealing with linear combinations of functions.
Use the Laplace Transform Table and the linearity property to determine
-6cos(4t)+9t^2}")
1. From the table
}")
)=")
")

}")
=s/(s^2+16)")

/(s^(2+1))=2/(s^3)")
2. From the linearity theorem, we have
-6cos(4t)+9t^2 }=")
)-")
-")
/(s^2+16)+18/(s^3)")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=215
If = \mathcal{L}{f(t)}")

This theorem is valuable when solving differential equations with exponential terms or in analyzing systems with exponential inputs.
Use the first shifting theorem and the linearity property to determine
sin(7t)+8t^3 e^(-6t)}")
Using the first shifting theorem, we have
1. In sin(7t)}")
=sin(7t)")

=\mathcal{L}{sin(7t)}")
")
Shifting
sin(7t)}=F(s-9)")
^2+7^2)")

2. In )}")
=t^3")

=\mathcal{L}{t^3}")
/(s^(3+1))=(3!)/(s^4)")
Shifting
)} =F(s+6)")
^4)")

3. From the linearity theorem, we have
sin(7t)}")
^2+49) )")
^2+49)")
^4")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=215
Understanding how to transform derivatives is crucial for effectively solving differential equations. This property allows us to express the Laplace Transform of a function’s derivative in terms of the original function’s transform. For a function 
}(t)\} =")
Since we will mostly deal with second-order differential equations, we will focus on the Laplace Transform of the first and second derivatives.
For function =sin(3t)")
} = sF(s) - f(0)")
Identifying the derivative and initial value:
=3cos(3t)")
Finding the Laplace Transforms:
From the Laplace Transform table, we have
Applying the Differentiation Property:
We need to show
Plugging in the transforms and initial value yields
Simplifying both sides gives
This equality confirms the differentiation property as the two sides match.
Find the Laplace Transform of =-3")
=1")


From the differentiation property, we have
Plugging in initial conditions
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=215
Table 4.2.1 summarizes the above properties of the Laplace Transform. These properties are crucial for simplifying computations and effectively utilizing the Laplace Transform in solving initial value problems.
Table 4.2.1: Properties of Laplace Transform
| Property | Example |
  |
}")  }") ") |
  for any constant for any constant |
  ") |
f}(s)") ") |
sin(5t) }") ^2+5^2)") |
 ") |
|
 -f'(0)") |
|
}") ^n (d^n)/(ds^n)(\mathcal{L}{f})") |
}") ^1 (d)/(ds)(\mathcal{L}{sin(7t)})") (7/(s^2+7^2))") /(s^2+49)^2") |
=-3t^5+9sin(t), \ t gt 0") .
, of the function
.
, of the function
=")
sin(t), \ t gt 0")
given the initial conditions =4") and
and =-2") .
.
In previous sections, we defined the Laplace Transform as an integral operator that can map a function
The formal inversion formula is typically not used directly due to its complexity. Instead, we rely on tables of Laplace Transforms to find the inverse transforms of
Similar to the Laplace Transform, the inverse operation is also linear. If 

This property ensures that the process of finding the inverse transform of a complicated expression can often be broken down into simpler, more manageable parts.
Determine {5/(s+7)+(8s)/ (s^2+16)}")
From Table 4.1
\ harr\ 1/(s+7)")
Thus from linearity, we obtain
{1/(s+7)}")
From the table of Laplace Transform, we get
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=217
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=217
In the process of finding the inverse Laplace transform, we often encounter rational function
Here, ")
")

In such cases, finding the inverse may require completing the square in the denominator or performing a partial fraction expansion, a technique similar to one used in integral calculus. These techniques are particularly necessary when attempting to match
is factorable into linear or irreducible quadratic factors. This technique breaks down complex rational expressions into simpler parts, making it easier to find the inverse Laplace Transform for each term individually. contains quadratic terms that do not factor into real linear terms, often indicating complex roots.To illustrate these methods, let’s proceed with a few examples demonstrating how to apply these techniques to find the inverse Laplace Transform of various functions.
Find the inverse Laplace transform
The denominator is not factorable. Therefore, we try to complete the square:


^2+16")
From Table 4.1, we see that
Thus, 
")
Now, we can use the inverse from the table
 }")
^2+4^2)}")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=217
Find the inverse Laplace Transform
In the denominator, we have a repeated linear factor 

/((s-2)^2(s+1))")
One way to find constants A, B, and C is to multiply both sides of the equality by ^2(s+1)")
We can then solve for the constants by equating coefficients of like terms on both sides. This forms a system of equations.
An alternative and often simpler method is strategically choosing values for
For B: Set 

For C: Set 

For A: Choose a different 
(1)-(1)-1/3(-2)^2")

With 


/((s-2)^2(s+1)) }")
Using linearity, the inverse Laplace Transform is
}-\mathcal{L}^-1{1/(s-2)^2}")
Referring to the table of inverse transforms
")
Applying these with 
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=217
=(-s-6)/(s^2+49),\ s gt 0") .
.
 = (-7s-2)/(s^2+s-2).")
 = \mathcal{L}{y}") to be
to be
Find the inverse Laplace transform =\mathcal{L}^-1{Y(s)}")
Having explored the Laplace Transform, its inverse, and its properties, we are now equipped to solve initial value problems (IVP) for linear differential equations. Our focus will be on second-order linear differential equations with constant coefficients.
General Approach:
1. Apply the Laplace Transform to each term of the differential equation. Use the properties of the Laplace Transform listed in Tables 4.1 and 4.2 to obtain an equation in terms of ")
2. The transforms of derivatives involve initial conditions at
3. Simplify the transformed equation to isolate
4. If needed, use partial fraction decomposition to break down
5. Determine the inverse Laplace Transform using the tables and linearity property to find
Shortcut Approach:
1. Find the characteristic polynomial of the differential equation =as^2+bs+c")
2. Substitute ")
=\mathcal{L}{f(t)}")
3. If needed, use partial fraction decomposition to break down
4. Determine the inverse Laplace transform of
Solve the initial value problem.
\ ;")
Using the General Approach
1. Take the Laplace Transform of both sides of the equation
Letting =\mathcal{L}^-1{y}")
2. Plugging in the initial conditions gives
3. Collecting like terms and isolating
Multiplying both the denominator and numerator by ")
4. Using partial fraction expansion, we get
5. From Table 4.1, we see that
Taking the inverse, we obtain the solution of the equation
Solve the initial value problem.
 \ ;")
Using the Shortcut Approach
1. The characteristic polynomial is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=219
In this section, we explore how to apply the Laplace Transform to piecewise continuous functions. In the next section, we will address solving initial value problems that involve second-order differential equations with constant coefficients where the forcing function
Jump discontinuities often occur in physical situations like switching mechanisms or abrupt changes in forces acting on the system. To handle such discontinuities in the Laplace domain, we utilize the unit step function to transform piecewise functions into a form amenable to Laplace transforms and subsequently find piecewise continuous inverses of Laplace transforms for the solution.
The unit step function (Heaviside function) ")
It steps (or jumps) from 0 to 1 at
 = {(0,t-a lt 0),(1,t-a ge 0):}")
The step function can also be transformed, e.g., shifted, stretched, or compressed. For example, by multiplying 
Or by combined shifting and reflecting
The step function enables us to represent any piecewise continuous function conveniently. For instance, consider the function
{(1, \ 0 le t lt a),(0, t ge a):}")
It can be rewritten as
We can extend Equation 4.5.1 to more general continuous piecewise functions.
= f_0(t) + u(t-a)(f_1(t)-f_0(t))")
(f_2(t)-f_1(t))")
The Laplace Transform of the step-modulated function is key in solving differential equations with piecewise forcing functions.
Theorem: Laplace Transform of a Step-Modulated Function. Let ")

}")

This theorem enables the transformation of step-modulated functions into the Laplace domain, which can then be manipulated algebraically.
Find the Laplace transform of 3t^2")
Find the Laplace transform of
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=221
The previous theorem also allows us to determine the inverse Laplace Transform of functions that arise from piecewise functions. However, it will be more convenient to shift the argument of ")
Translation in ")
Given =\mathcal{L}{g(t)}")
Find the inverse Laplace transform of the given function and find distinct formulas for ")
Since ")
")
Letting =2/s-s/(s^2+1)")
=(s-1)/(s^2+1)")
=\mathcal{L}^-1{2/s-s/(s^2+1) }")
=\mathcal{L}^-1{s/(s^2+1) -1/(s^2+1) }")
Using Equation 4.5.4 with 

=")
}")
")
")
We simplify it using trigonometric identities: =sin(t)")
=-cos(t)")
=2-cos(t)")
From Equation 4.5.1, we recognize that
") , corresponds to
, corresponds to ") , the function active before the step.
, the function active before the step.+cos(t)") , represents the change in the function at the step, thus corresponding to
, represents the change in the function at the step, thus corresponding to  .
.Given =2-cos(t)")
")
We can now express
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=221
of .
. Enter ") for
for ") if the unit function is a part of the inverse.
if the unit function is a part of the inverse.
.
In this section, we tackle initial value problems (IVP) for second-order differential equations with constant coefficients where the forcing function
\;")
1. Write the piecewise forcing function in terms of the step function.
2. Determine the Laplace transform of the differential equation.
3. Solve the transformed equation for
4. Use the Laplace transform tables and the translation theorem in previous sections to determine the inverse Laplace transform.
5. If required, rewrite
Solve the given initial value problem.

,")
=0,")
1. The forcing function =u(t-2)")
2. Taking the Laplace transform of the equation yields


Letting =\mathcal{L}{y}")
}=e^(-2s)\mathcal{L}{t+2}")
Applying the initial conditions, we get
3. Solving for
=1/(s^2-3s-10 )(4)+ 1/(s(s^2-3s-10) )(5-6e^(-2s)) +")
Factoring the denominators yields
=1/((s+2)(s-5) )(4) +1/(s(s+2)(s-5) )(5-6e^(-2s))+")
4. To find
where
=1/((s+2)(s-5) )")
=1/(s(s+2)(s-5) )")
Computing the inverse Laplace transform of ")
=\mathcal{L}^-1{F(s)}")
=\mathcal{L}^-1{G(s)}")
=\mathcal{L}^-1{H(s)}")
To make the inverse process easier, let’s rewrite
Taking the inverse transform and using the translation theorem for the terms with the exponential term, we obtain
=\mathcal{L}^-1{Y(s)} =")
} +5\mathcal{L}^-1{G(s)}")
+1/35e^(5t))-")
![3u_2(t)[2(-1/10+1/14e^(-2(t-2))+1/35e^(5(t-2)))+(3/100-(t-2)/10-1/28e^(-2(t-2))+1/175e^(5(t-2)))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=3u_2%28t%29%5B2%28-1%2F10%2B1%2F14e%5E%28-2%28t-2%29%29%2B1%2F35e%5E%285%28t-2%29%29%29%2B%283%2F100-%28t-2%29%2F10-1%2F28e%5E%28-2%28t-2%29%29%2B1%2F175e%5E%285%28t-2%29%29%29%5D&fg=000000&font=TeX&svg=1 "3u_2(t)[2(-1/10+1/14e^(-2(t-2))+1/35e^(5(t-2)))+(3/100-(t-2)/10-1/28e^(-2(t-2))+1/175e^(5(t-2)))]")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=223
The current 
+9I(t)")
,(-1 \ \ \ 1lttlt2) ,(0 \ \ \ \ \ \ \ \ \ 2ltt):}")
=0,")
1. The forcing function
= 1 + u(t-1)(-1-1)")
2. Taking the Laplace transform of the equation yields


Letting =\mathcal{L}{I}")
3. Solving for ")
4. To find =\mathcal{L}^-1{J(s)}")
where
=1/(s(s^2+9))")
Computing the inverse Laplace transform of
Using the translation theorem, we obtain
}")
}")
)")
))u(t-1)")
5. This can be written as the piecewise function
The figure below depicts the graph of the current
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=223
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=223
 .
.
,(0,t ge 3 or t lt 2):}\ ,")
is in the form  = f(t) - g(t) u_6(t)")
is in the form  = f(t) - g(t) u_9(t)")
In prior sections, we explored initial value problems for second-order differential equations with constant coefficients, focusing on cases where the forcing function, ")
\ ;")
Now, let’s turn our attention to a different type of forcing function: one that represents an impulsive force. Impulsive forces are characterized by very large magnitudes over extremely short time intervals, effectively appearing as a sudden “jolt” or “spike” in the system. Such impulses occur in various contexts, including electrical circuits during a switch-on event, mechanical systems during a collision, or any scenario where a sudden, significant force is applied for a brief period.
To mathematically model these impulsive forces, we use the Dirac Delta function, denoted as ")
1. Zero everywhere except at zero:
2. Integral equals one:
3. Sifting property:
 delta(t) = f(0)")
By shifting the argument ")

Thus the sifting property extends to
4. Sifting at
 delta(t-a) = f(a)")
The Laplace Transform provides a convenient way to handle the Dirac Delta function in the context of solving differential equations. The transform of a shifted Dirac Delta function is given by
Understanding the Dirac Delta function and its properties is crucial for modeling and analyzing systems subjected to impulsive forces.
Find the solution to the initial value problem
,")
=1,")
Taking the Laplace transform of the equation, applying Equation 4.7.1 with 
Solving for
Computing the inverse Laplace transform gives
=u(t-pi) sin(4(t-pi))")
Which equivalently is


The below figure shows 
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=225
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=225


This section briefly shows the practical use of the Laplace Transform in electrical engineering for solving differential equations and systems of such equations associated with electric circuits. The Laplace Transform is particularly beneficial for converting these differential equations into more manageable algebraic forms.
We start by looking at a single initial value problem (IVP) from a basic RLC circuit. We demonstrate how the Laplace transform can simplify finding the circuit’s current as a function of time by translating a differential equation into an algebraic equation.
Consider an RLC series circuit with a resistor of
Given information:
=0")
=I'(0)=0")
In Example 3.9.1, we developed the initial value problem governing this RLC circuit.
Applying the Laplace Transform to the differential equation results in
Letting }=J(s)")
Since ")
Solving for
Breaking
=1/807((650s+5000)/(s^2+10^2))-")
To simplify the second fraction, we complete the square.
=650/807(s/(s^2+10^2))+5000/807(1/(s^2+10^2)) -")
^2+13^2)) -")
Applying the inverse Laplace Transforms to
=650/807cos(10t)+500/807sin(10t)+")
This result is consistent with what we obtained in Example 3.9.1 by solving the initial value problem using the method of undetermined coefficients.
The Laplace Transform can be applied to turn certain systems of differential equations with initial values into systems of algebraic equations in the s-domain. Solving these algebraic equations allows us to find functions of
a) For the given electrical circuit diagram, derive the system of differential equations that describes the currents in various branches of the circuit. Assume that all initial currents are zero. b) Once the system of differential equations and initial conditions are established, solve the system for the currents in each branch of the circuit.

We denote the current passing through the main branch by 


Given the voltage drop across a resistor is 
/dt")
In the main loop including 0.1 H-inductor, we find
In the sub-branch including the 2 Ω-resistor and 0.1 H-inductor, we find
Also, since current
Thus the system of equations describing the currents in the circuit is
,(0.1I'_3-2I_2=0), (I_1-I_2-I_3=0) :}")

=I_2(0)=I_3(0)=0")
b)
To solve the system, we apply the Laplace Transform to each equation in the system.
,(0.1\mathcal{L}{I'_3}-2\mathcal{L}{I_2}=0), (\mathcal{L}{I_1}-\mathcal{L}{I_2}-\mathcal{L}{I_3}=0) :}")
Letting ")
")
")
-I_1(0)")
-I_3(0)")
Since initial currents are zero, system 4.8.2 simplifies to
In the third equation, we express ")
Next, we substitute this expression for
To eliminate ")
")

(4+0.2s)J_1(s)+0.2sJ_1(s)")
Rearranging for ")
To eliminate decimal and rational terms, we multiply the numerator and the denominator by 
=(60s+1200)/(s^3+50s^2+400s)")
/(s(s^2+50s+400))")
Breaking
By substituting
/(s(s+10)(s+40)(0.1s+2))")
This simplifies to
Breaking
By substituting the expressions for
Finally, applying the inverse Laplace Transforms to 


Table 4.1: Table of Laplace Transform
| |
|
Domain of |
|
|
|
| |
|
|
| |
|
|
") |
/(2s^(3//2))") |
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
") |
/(s^2+b^2)^2") |
|
") |
/(s^2+b^2)^2") |
|
| |
|
") |
| |
|
|
Step Function: =u(t-a)") |
/s") |
|
f(t-a)") |
 F(s)") |
 |
| Direct Delta Function: |
|
|
f(t)") |
") |
|
") |
^kF^((k))(s)") |
|
dx") |
)/s") |
|
g(x)dx") |
.G(s)") |
Table 4.2: Properties of Laplace Transform
| Property | Example |
| |
|
| for any constant |
|
| |
|
| |
|
| |
|
| |
|
V
This chapter addresses the challenge of solving complex differential equations, often encountered in physical applications, which do not yield solutions expressible by standard functions. It focuses on series solutions as an alternative method.
5.1 Review of Power Series: This section revisits the concept of power series, examining their key properties and how they are used in solving differential equations.
5.2 Power Series Solutions to Linear Differential Equations: This section discusses the process of finding the power series representing solutions to linear differential equations.

Emmy Noether, born in 1882 in Erlangen, Germany, stands as a towering figure in the realm of mathematics and theoretical physics, overcoming the formidable gender barriers of her time to revolutionize these fields. Despite initially being barred from holding an academic position due to her gender, Noether’s profound contributions, especially in abstract algebra and theoretical physics, earned her worldwide acclaim. Her most significant achievement, Noether’s Theorem, unveiled a fundamental connection between symmetries and conservation laws in physics, a principle crucial in many areas governed by differential equations. Her work in the calculus of variations, a field closely related to differential equations, provided essential tools for physicists and mathematicians alike. Noether’s insights into ring theory and algebraic invariants also laid the groundwork for modern algebra, influencing the methods used in solving differential equations. Emmy Noether’s story is not just one of remarkable intellectual feats; it is a tale of resilience and perseverance against the societal norms of her era. Her legacy continues to inspire and empower generations of mathematicians and scientists, symbolizing the unyielding pursuit of knowledge against all odds.
Not all differential equations have solutions that can be expressed in terms of elementary functions such as polynomials, exponentials, trigonometric functions, etc. Even when they do, finding these solutions explicitly can be complex or impossible. Series solutions offer a way to represent the solution as an infinite sum of terms. They can provide insights into the behavior of solutions, such as their convergence, oscillation, or growth properties when an explicit solution is unknown. In practical applications, an exact solution may not be necessary, and a finite series (a truncation of the infinite series) can serve as an approximate solution. This method is especially useful in computational methods and simulations.
Before delving into power series solutions of differential equations, let’s review the concept of a power series and its relevant properties.
A power series is an infinite series of the form
where 
+")
This allows us to approximate functions in regions where the series converges, which is essential for understanding and solving differential equations. We may sometimes be interested in the pattern or form of initial terms in the series or manipulating terms such as re-indexing or combining terms. Thus, we can ‘strip out’ these terms from the general series notation.
^oo\ a_n(x-x_0)^n")
Here, the first two terms are stripped out of the general series notation, and the summation index now starts from 
Shifting the index of a power series changes the starting point of the summation and reindexes the terms of the series. This is particularly useful for aligning terms for addition or subtraction of series. Consider a power series
To shift the series right by 
To shift the series left by 
When solving differential equations using series often we need to add or subtract series. When adding or subtracting series, we ensure the terms being added or subtracted correspond to the same power of the variable. This means ensuring both series have the same power of 
=sum_(n=0)^oo\ a_n(x-x_0)^n")
Since the power of
where
If there is an ^n")
This simplifies the handling and manipulation of series in differential equation solutions.
Write the following as a single series in terms of ^n")
1. First, we multiply ^2")
2. We shift the indexes in both series to make the exponent of ")
3. Finally, we ensure both series start from the same lower limit. Depending on the series, we can sometimes strip out terms or adjust the index if the preceding terms are already zero. Notice that if the second series starts from 
")
Now we can combine the series to obtain the final answer.
Note: Generally, whenever a series contains a factor of ")

One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=234
The convergence of power series is essential for ensuring that the series represents the function accurately over some interval. A series converges at a particular point if the sum approaches a finite limit as

For any power series, any of the three cases can be true:
 : Here, the sum of the series equals to
: Here, the sum of the series equals to  .. : The series converges if
.. : The series converges if  and diverges if
and diverges if  . is called the radius of convergence, and the interval
. is called the radius of convergence, and the interval ") is the interval of convergence.
is the interval of convergence.To determine the radius and interval of convergence for a given power series, the Ratio Test is often used. The Ratio Test involves taking the limit

If 

Differentiation and integration of power series within their interval of convergence can be performed term-by-term. For a given power series centered at
The first derivative of
Note that the index of the first derivative starts at
Similarly, the second derivative of
Note that the index of the second derivative starts at 
Suppose ^oo\ a_nx^n")

1. First, we find
^oo\ a_nx^n")
^oo\ n a_nx^(n-1)")
2. Next, we substitute 
sum_(n=2)^oo\ n(n-1) a_n x^(n-2)")
^oo\ n a_n x^(n-1)")
3. Multiplying the
^oo\ n(n-1) a_n x^(n-2)")
^oo\ n(n-1) a_n x^n")
^oo\ n a_n x^n")
4. Note that the exponent of
^oo\ (n+2)(n+1) a_(n+2) x^n")
5. Finally, we ensure all series start from the same lower limit. Notice that the second series is zero at 


^oo\ n(n-1) a_n x^n")
^oo\ n a_n x^n")
Combining the series yields
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=234
If two power series are equal for all
Implies 
If a power series equals zero for all
Implies 
A Taylor series is a specific type of power series representation of a function based on its derivatives at a specific point, typically at
Here, (x_0)")

When 

^oo\ x^n/(n!)=")
=sum_(n=n_0)^oo\(-1)^n x^(2n+1)/((2n+1)!)=")
=sum_(n=n_0)^oo\(-1)^n x^(2n)/((2n)!)=")
A recursive relation for a series provides a way to calculate each term of the series using one or more of the preceding terms. Instead of defining each term independently, a recursive relation relates each term to its predecessors, building the series progressively. This method is particularly useful when the direct calculation of terms is complex or when the relationship between consecutive terms is simpler to express.
Generally, a recursive relation has the following structure.
,a_(n-2),...a_(n-k))")

Here,
The recursive relation allows the calculation of all coefficients in the series from a set of initial conditions or known coefficients. These are usually derived from the initial or boundary conditions of the differential equation.
Suppose the recursive formula for a power series solution is
Find the second, third, and fourth terms of the series in terms of
To find the terms we plug 



Given 

One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=234
.
^oo \ n (n-1) a_n x^(n-2)")
^oo\ -2n a_n x^(n-1)")
can be expressed as a power series . Express the following as a single series in terms of .
Find the fourth and fifth terms in terms of
In earlier discussions, we primarily focused on homogeneous linear differential equations with constant coefficients. However, many physical applications lead to more complex second-order homogeneous linear differential equations of the form
where 

")
Given the continuity of polynomials, 

=0")
!=0")

Theorem. Suppose !=0")
Moreover, the radius of convergence ")
To find series solutions of Equation 5.2.1, we consider a power series converging near an ordinary point
1. Determine the differential equation and choose the point
2. Assume a power series solution (Equation 5.2.2) for
3. Substitute the series and its derivative into the differential equation.
4. Organize like powers of
5. Collect and group the coefficients of like powers of
6. Solve equations by equating coefficients of like powers of
7. Use the given initial or boundary conditions to find specific
8. Construct the solution with the coefficients found and discuss the radius and interval of convergence.
Determine a series solution for the differential equation
1. Notice that =1")
2. First, we need to find
3. Next, we substitute
4. The next step is to align terms. To do this we need to shift the summation indices to start at the same value. Letting 


^oo\ (k+2)(k+1) a_(k+2) x^(k)")
5. Adding the series yields
6. From the Power Series Vanishing on an Interval property discussed in Section 5.1, we know that If a power series is zero for all
or
=(-a_k)/((k+2)(k+1) ),")

This is called the recurrence relation for the values of
7. Next, we write a few terms of the series to see if we can determine the trend and hopefully the explicit formula of the series. Setting 
 " title="k=0 ->" class="asciimath mathjax"> " title="k=0 ->" class="asciimath mathjax"> /((2)(1) )") |
 " title="k=1 ->" class="asciimath mathjax"> " title="k=1 ->" class="asciimath mathjax"> /((3)(2) )") |
 " title="k=2 ->" class="asciimath mathjax"> " title="k=2 ->" class="asciimath mathjax"> /((4)(3) )") /((4)(3)(2)(1) )") |
 " title="k=3 ->" class="asciimath mathjax"> " title="k=3 ->" class="asciimath mathjax"> /((5)(4) )") /((5)(4)(3)(2) )") |
 " title="k=4 ->" class="asciimath mathjax"> " title="k=4 ->" class="asciimath mathjax"> /((6)(5) )") /((6)(5)(4)(3)(2)(1) )") |
 " title="k=5 ->" class="asciimath mathjax"> " title="k=5 ->" class="asciimath mathjax"> /((7)(6) )") /((7)(6)(5)(4)(3)(2) )") |
Notice that the term with even indices can be written in terms of the previous term and eventually in terms of 

=((-1)^ma_0)/((2m)!")

=((-1)^ma_1)/((2m+1)!")
8. Thus the general solution of the equation can be written as
^oo\ a_(2m)x^(2m)")
^oo\ (-1)^m x^(2m) /((2m)!")
We recognize that the series in the solution are the Maclaurin series of ")
")
=sum_(m=0)^oo\ (-1)^m x^(2m) /((2m)!")
Therefore, the general solution can be expressed as
for some arbitrary constant
The interval of convergence for both the cosine and sine series is all real numbers
For both series in the solution, the Ratio Test indicates that as 
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=236
In practice, we are interested in finding the series solution for equations with nonconstant coefficients. This is because equations with constant coefficients can be easily solved using the technique outlined in Chapter 3 for homogeneous equations with constant coefficients. Let us do another example for an equation with nonconstant coefficients.
Find a series solution for the differential equation
y''+2xy'-2y=0")
1. Note that =1+x^2")
2. Next, we find
3. Next, we substitute
Multiplying the coefficients by the series, we get
4. Note that the exponent of
Also, notice that the second series is zero at
5. Combining the series yields
6. Now setting the coefficient to zero gives
7. So the recursive relation is simplified to
Setting 
 " title="n=0 ->" class="asciimath mathjax"> " title="n=0 ->" class="asciimath mathjax">  |
 " title="n=1 ->" class="asciimath mathjax"> " title="n=1 ->" class="asciimath mathjax">  |
 " title="n=2 ->" class="asciimath mathjax"> " title="n=2 ->" class="asciimath mathjax">   |
 " title="n=3 ->" class="asciimath mathjax"> " title="n=3 ->" class="asciimath mathjax">   |
 " title="n=4 ->" class="asciimath mathjax"> " title="n=4 ->" class="asciimath mathjax">   |
 " title="n=5 ->" class="asciimath mathjax"> " title="n=5 ->" class="asciimath mathjax">  |
Notice that all the terms with odd indices are zero except 

=(-1)^(m+1)1/(2m-1)a_0")

=a_1")
8. Thus the general solution of the equation can be written as
Find the first six terms in the series solution of the initial value problem
y''+2xy'-2y=0,")
=2,\ y'(0)=3")
In Example 5.2.2, we found the general series solution to this differential equation.
To apply the initial conditions, we first recognize that =2")
=3")


![a_0[(-1)^(1+1)x^(2(1))/(2(1)-1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=a_0%5B%28-1%29%5E%281%2B1%29x%5E%282%281%29%29%2F%282%281%29-1%29%5D&fg=000000&font=TeX&svg=1 "a_0[(-1)^(1+1)x^(2(1))/(2(1)-1)]")


![a_4=a_0[(-1)^(2+1)x^(2(2))/(2(2)-1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=a_4%3Da_0%5B%28-1%29%5E%282%2B1%29x%5E%282%282%29%29%2F%282%282%29-1%29%5D&fg=000000&font=TeX&svg=1 "a_4=a_0[(-1)^(2+1)x^(2(2))/(2(2)-1)]")


![a_6=a_0[(-1)^(3+1)x^(2(3))/(2(3)-1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=a_6%3Da_0%5B%28-1%29%5E%283%2B1%29x%5E%282%283%29%29%2F%282%283%29-1%29%5D&fg=000000&font=TeX&svg=1 "a_6=a_0[(-1)^(3+1)x^(2(3))/(2(3)-1)]")


![a_8=a_0[(-1)^(4+1)x^(2(4))/(2(4)-1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=a_8%3Da_0%5B%28-1%29%5E%284%2B1%29x%5E%282%284%29%29%2F%282%284%29-1%29%5D&fg=000000&font=TeX&svg=1 "a_8=a_0[(-1)^(4+1)x^(2(4))/(2(4)-1)]")

Therefore, the solution to the initial value problem is
=2+3x+2x^2-2/3x^4+2/5x^6-2/7x^8+...")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=236
y''+(1-3x)y'-y=0,")
=3,\ y'(0)=2")

=4,\ y'(0)=3")
y''+(1-4x)y'+(2+5x)y=0,")
=1,\ y'(0)=2")
VI
This chapter presents the matrix method for solving systems of first-order differential equations. These systems are instrumental in modeling applications with multiple interdependent processes, common in complex real-world situations.
6.1 Review of Matrices: This section offers a concise overview of essential matrix theory concepts in linear algebra, foundational for addressing systems of differential equations.
6.2 Review of Linear Independence and Systems of Equations: This section reviews the topic of systems of linear equations and methods for assessing the linear independence of solution sets.
6.3: Review: Eigenvalues and Eigenvectors: This section revisits eigenvalues and eigenvectors, explaining their calculation and importance in solving systems of differential equations.
6.4: Linear Systems of Differential Equations: This section introduces first-order differential equation systems and their matrix representations and discusses solution existence. It also explores transforming higher-degree differential equations into first-order system forms.
6.5 Solutions to Homogeneous Systems: This section details methods to find solutions for homogeneous differential equation systems and employs the Wronskian to verify solution independence.
6.6 Constant-Coefficient Homogeneous Systems: Real Eigenvalues: This section continues exploring homogeneous systems of differential equations with constant coefficients, focusing on scenarios with real-number eigenvalues.
6.7 Constant-Coefficient Homogeneous Systems: Complex Eigenvalues: This section addresses solutions for homogeneous systems with constant coefficients when eigenvalues are complex numbers.
6.8 Constant-Coefficient Homogeneous Systems: Repeated Eigenvalues: This section discusses solving homogeneous systems with constant coefficients when eigenvalues are repeated real numbers.
6.9 Nonhomogeneous Linear Systems: This section studies nonhomogeneous linear systems focusing on the method of variation of parameters.
Evelyn Boyd Granville, born in 1924 in Washington, D.C., is a pioneering mathematician whose journey is a testament to resilience and brilliance in the face of racial and gender barriers. As one of the first African-American women to earn a Ph.D. in mathematics from Yale University in 1949, Granville’s early work in functional analysis laid a foundation for her diverse and impactful career. She played a pivotal role in America’s space race, working with IBM on the Project Vanguard and Project Mercury space programs, where she developed complex computer algorithms for trajectory analysis. This work heavily relied on systems of differential equations to calculate the orbits and predict the paths of spacecraft – a critical component in the success of these early space missions.
Granville’s contributions extended beyond the realm of space exploration. She was also a passionate educator and advocate for women and minorities in STEM fields. Throughout her career, she taught mathematics at various universities and inspired countless students to pursue careers in science and technology.
Linear algebra, particularly the study of matrices, is fundamental in understanding and solving systems of differential equations. This section provides a focused overview of the key concepts in matrix theory that are essential for this purpose.
A matrix is a rectangular array of numbers, symbols, or expressions, arranged in rows and columns. The individual items in a matrix are called its elements or entries. A matrix is typically denoted by a capital letter (e.g., A, B, C). The element in the 

")


A row matrix has only one row and multiple columns, while a column matrix has one column and multiple rows. These are also known as row vectors and column vectors, respectively.
![x = [[a_11, a_12,...,a_(1n)]]_(1xxn)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=x%20%3D%20%5B%5Ba_11%2C%20a_12%2C...%2Ca_%281n%29%5D%5D_%281xxn%29&fg=000000&font=TeX&svg=1 "x = [[a_11, a_12,...,a_(1n)]]_(1xxn)")
A matrix with the same number of rows and columns is called a square matrix. For example, matrix B is an 
In a diagonal matrix, the elements outside the main diagonal are all zero. The main diagonal is the set of elements 
The identity matrix is a special type of diagonal matrix where all the elements on the main diagonal are 1. It is denoted as 
The zero matrix is a matrix in which all elements are zero. It is denoted by ")
Matrix addition and subtraction are elementary operations where matrices of the same dimension are added or subtracted element by element. If ![A=[a_(ij)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5Ba_%28ij%29%5D&fg=000000&font=TeX&svg=1 "A=[a_(ij)]")
![B=[b_(ij)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=B%3D%5Bb_%28ij%29%5D&fg=000000&font=TeX&svg=1 "B=[b_(ij)]")

=a_(ij)+b_(ij)")
These operations are commutative (i.e., 
+C=A+(B+C)")
Scalar multiplication involves multiplying every element of a matrix by a scalar (a constant number). If 
")
Scalar multiplication is distributive over matrix addition or subtraction (i.e., =kA+kB")
=(kl)A")
Find matric 
![A=[[-1,3],[0,7]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%5B-1%2C3%5D%2C%5B0%2C7%5D%5D&fg=000000&font=TeX&svg=1 "A=[[-1,3],[0,7]]")
Matrices
We first multiply all entries of matrix A by 3.
We then subtract the corresponding entries.
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=240
Matrix multiplication is only possible when the number of columns in the first matrix matches the number of rows in the second matrix. Consider two matrices ")
")
")

Matrix multiplication is associative, meaning C = A(BC)")
 = AB + AC")


Special cases in matrix multiplication include interactions with identity and zero matrices. Multiplying any matrix by an identity matrix of appropriate size leaves the matrix unchanged (i.e., 
Compute matrix 
![A=[[1,4,-1],[2,0,-5]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%5B1%2C4%2C-1%5D%2C%5B2%2C0%2C-5%5D%5D&fg=000000&font=TeX&svg=1 "A=[[1,4,-1],[2,0,-5]]")
To compute the product of matrices A and B, 


We compute each entry of matrix C using Equation 6.1.1:
Therefore, the resulting matrix C is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=240
The determinant is a scalar value that is associated with every square matrix. It provides critical information about the matrix, such as its invertibility. The determinant of a matrix A is denoted as
For a 
For larger square matrices, the determinant is typically calculated using the method of cofactor expansion. For instance, the determinant of a 
Another approach to compute determinants, especially for large matrices, is to use row reduction to transform the matrix into an upper triangular form. The determinant is then the product of the diagonal elements.
Find the determinant of the given matrices.
![A=[[-5,-1],[3,2]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%5B-5%2C-1%5D%2C%5B3%2C2%5D%5D&fg=000000&font=TeX&svg=1 "A=[[-5,-1],[3,2]]")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=240
The inverse of a square matrix ")
One common method to find a matrix inverse is to use the adjugate and determinant. The formula is
where ")
![A=[[a_11,a_12],[a_21,a_22]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%5Ba_11%2Ca_12%5D%2C%5Ba_21%2Ca_22%5D%5D&fg=000000&font=TeX&svg=1 "A=[[a_11,a_12],[a_21,a_22]]")
Another method for finding the inverse is the row reduction method, which involves augmenting the matrix
and then performing row operations to transform 
This method is particularly useful for numerical calculations and for larger matrices.
If a matrix is invertible, its inverse is unique. A square matrix is invertible if and only if it is nonsingular, meaning its determinant is not zero. If the determinant of a matrix is zero, the matrix does not have an inverse, and it is referred to as a singular matrix.
Find the inverse of matrix A, provided it exists.
We first find the determinant of A to determine if it has an inverse.
The determinant is nonzero, so the inverse exists. For a
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=240
Find the inverse of matrix A, provided it exists.
To find the inverse of a
![[A|I]=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5BA%7CI%5D%3D&fg=000000&font=TeX&svg=1 "[A|I]=")
Apply the row operation:



Since we have successfully transformed the left side of the augmented matrix into the identity matrix, the inverse of matrix A exists and is given by the right side of the augmented matrix:
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=240
Differentiation and integration of matrices are important in the context of systems of linear differential equations, particularly in finding the solution to nonhomogeneous systems.
Differentiating a matrix with function entries involves taking the derivative of each element of the matrix individually. Consider matrix ")
The derivative of ")
/(dt)")
The standard rules of differentiation, including the product rule, quotient rule, and chain rule, apply to each element of the matrix.
Integrating a matrix with function entries is similar to differentiation and is done element-wise. The integral of a matrix
Evaluate the integral of matrix
The integral of matrices is an element-wise operation.
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=240
![A = [(0,-3,3),(3,4,-3)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%20%3D%20%5B%280%2C-3%2C3%29%2C%283%2C4%2C-3%29%5D&fg=000000&font=TeX&svg=1 "A = [(0,-3,3),(3,4,-3)]") and
and ![B = [(-4,0,-4),(-3,0,0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=B%20%3D%20%5B%28-4%2C0%2C-4%29%2C%28-3%2C0%2C0%29%5D&fg=000000&font=TeX&svg=1 "B = [(-4,0,-4),(-3,0,0)]") , find matrix
, find matrix  .
.
![A = [(-8,3),(21,-8)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%20%3D%20%5B%28-8%2C3%29%2C%2821%2C-8%29%5D&fg=000000&font=TeX&svg=1 "A = [(-8,3),(21,-8)]") .
.
![A = [(3,2,0),(1,1,0),(-2,-4,1)].](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%20%3D%20%5B%283%2C2%2C0%29%2C%281%2C1%2C0%29%2C%28-2%2C-4%2C1%29%5D.&fg=000000&font=TeX&svg=1 "A = [(3,2,0),(1,1,0),(-2,-4,1)].")
![A=[(5,-5),(-2,-4)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%285%2C-5%29%2C%28-2%2C-4%29%5D&fg=000000&font=TeX&svg=1 "A=[(5,-5),(-2,-4)]") and
and ![B=[(-2,1),(4,4)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=B%3D%5B%28-2%2C1%29%2C%284%2C4%29%5D&fg=000000&font=TeX&svg=1 "B=[(-2,1),(4,4)]") , find their multiplication .
, find their multiplication .
Evaluate the integral of

Solving systems of linear equations is a fundamental aspect of linear algebra. To solve these systems efficiently, we often express them in matrix form. Consider a system of linear equations
x_n=b_1),(a_21x_1+a_22x_2+...+a_(2n)x_n=b_2 ),(\ \ \ \...),(\ \ \ \...),(\ \ \ \...),(a_(m1)x_1+a_(m2)x_2+...+a_(m\n)x_n=b_m ) :}")
Such a system can be represented in matrix form as
![[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5Ba_11%2C%20a_12%20%2C...%2C%20a_%281n%29%5D%2C%5Ba_21%2Ca_22%2C%20...%2C%20a_%282n%29%5D%2C%20%5Bvdots%2Cvdots%20%2Cddots%2C%20vdots%5D%20%2C%5Ba_%28m1%29%2C%20a_%28m2%29%20%2C%20...%2C%20a_%28mn%29%5D%20%5D&fg=000000&font=TeX&svg=1 "[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]")
![[[x_1],[x_2], [vdots] ,[x_n] ]=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5Bx_1%5D%2C%5Bx_2%5D%2C%20%5Bvdots%5D%20%2C%5Bx_n%5D%20%5D%3D&fg=000000&font=TeX&svg=1 "[[x_1],[x_2], [vdots] ,[x_n] ]=")
which is simply denoted as
Here, ")
")
To simplify this system, we use an augmented matrix, which combines the coefficient matrix
Row operations are then used to systematically simplify this augmented matrix, maintaining the equivalence of the system. The goal is to achieve either row echelon form (REF) or reduced row echelon form (RREF). REF, achieved through the Gaussian elimination method, simplifies the matrix into an upper triangle form where all non-zero rows are above rows of all zeros, and each leading coefficient (first non-zero number in a row) is to the right of the leading coefficient of the row above it. RREF achieved through the Gauss-Jordan elimination method, further simplifies REF so that each leading coefficient is the only non-zero number in its column and is equal to 1, making it easier to read the solutions directly from the matrix.
The solution of the system depends on the final form of the augmented matrix after applying row operations:
 ), the system is consistent and has a unique solution.
), the system is consistent and has a unique solution.
), it indicates that the system is inconsistent and has no solution.
 ), the system has an infinite number of solutions. In such cases, the solution is typically expressed in a parametric form. This case typically happens when there are fewer independent equations than variables.
), the system has an infinite number of solutions. In such cases, the solution is typically expressed in a parametric form. This case typically happens when there are fewer independent equations than variables.
Understanding linear independence is also important for solving systems of linear equations and differential equations. It helps in determining whether a set of solutions forms a valid basis for the solution space and whether the solutions are unique and span the entire solution space.
A set of vectors in a vector space is said to be linearly independent if no vector in the set can be written as a linear combination of the others. Consider a set of vectors
The vectors are linearly independent if the only solution to the equation
is 



To test for linear independence or dependence, we can represent this system in matrix form as
where
with these vectors as columns. The set of vectors is linearly independent if the determinant of is non-zero. If the determinant is zero, the vectors are linearly dependent. into row echelon form (REF) or reduced row echelon form (RREF). If any column in lacks a leading 1 (pivot), the vectors are linearly dependent.If the vectors are found to be linearly dependent, the specific relationship among them can be found by solving the system =bb(0)")

Determine whether the given set of vectors is linearly independent or dependent. In the case of linear dependence, identify the specific relationship among the vectors.
To test a set of vectors for linear independence, we first form a matrix with these vectors as columns and then determine if its determinant is non-zero.
The determinant is nonzero, and thus the vectors are linearly independent.
Determine whether the given set of vectors is linearly independent or dependent. If they are dependent, identify the specific relationship among them.
To test a set of vectors for linear independence, we first form a matrix
Calculating the determinant of
Since the determinant is zero, the vectors are linearly dependent.
To find the relationship among the vectors, we solve the system
We form the augmented matrix and then use row reduction to simplify it.
Applying row operations to bring the matrix to RREF, we get
The third column lacks a leading 1 (pivot), indicating that 
Converting the first row of the RREF to an equation, we have

Converting the second row of the RREF to an equation, we have

Choosing 
Thus the relationship among the vectors in the set is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=242
whose columns are the vectors in the set and computing the determinant of .![bb(v_1)=[(5),( 6),(-10)], \ bb(v_2)=[( 2),( 1),(-4)], \ bb(v_3)=[( -2),( 0),(6)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28v_1%29%3D%5B%285%29%2C%28%206%29%2C%28-10%29%5D%2C%20%5C%20bb%28v_2%29%3D%5B%28%202%29%2C%28%201%29%2C%28-4%29%5D%2C%20%5C%20bb%28v_3%29%3D%5B%28%20-2%29%2C%28%200%29%2C%286%29%5D&fg=000000&font=TeX&svg=1 "bb(v_1)=[(5),( 6),(-10)], \ bb(v_2)=[( 2),( 1),(-4)], \ bb(v_3)=[( -2),( 0),(6)]") |
Since the determinant is nonzero, the vectors are linearly independent.
whose columns are the vectors in the set and computing the determinant of .![bb (v_1)=[(6),( 2),(-18)], \ bb (v_2)=[( 4),( 1),(-12)], \ bb (v_3)=[( 0),( -3),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%20%28v_1%29%3D%5B%286%29%2C%28%202%29%2C%28-18%29%5D%2C%20%5C%20bb%20%28v_2%29%3D%5B%28%204%29%2C%28%201%29%2C%28-12%29%5D%2C%20%5C%20bb%20%28v_3%29%3D%5B%28%200%29%2C%28%20-3%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "bb (v_1)=[(6),( 2),(-18)], \ bb (v_2)=[( 4),( 1),(-12)], \ bb (v_3)=[( 0),( -3),(0)]") |
Since the determinant is zero, the vectors are linearly dependent.
Understanding eigenvalues and eigenvectors is essential for solving systems of differential equations, particularly in finding solutions to homogeneous systems. This section aims to review these concepts and demonstrate how to find them.
Consider a square matrix ")
")
In many applications, we seek a special scalar 
In that case, scalar

To find the eigenvalues of matrix
Here 
=det(A-lambda I)")
 = 0.")
Once the eigenvalues are determined, the corresponding eigenvectors are obtained by solving the system bb{v} =bb(0)")
is a complex eigenvalue with an associated eigenvector , then  (the complex conjugate of ) is also an eigenvalue, with the corresponding eigenvector being
(the complex conjugate of ) is also an eigenvalue, with the corresponding eigenvector being  (the complex conjugate of ).
(the complex conjugate of ).For the given matrix, a) find the characteristic polynomial of the matrix and b) all the eigenvalues and their associated eigenvectors.

![=[(3,5),(1,-1)] -lambda[(1,0),(0,1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%283%2C5%29%2C%281%2C-1%29%5D%20-lambda%5B%281%2C0%29%2C%280%2C1%29%5D&fg=000000&font=TeX&svg=1 "=[(3,5),(1,-1)] -lambda[(1,0),(0,1)]")
Thus, the characteristic polynomial of
b) The roots of ")


bb(u)=bb(0)")
For
![[(3-lambda_1,5),(1,-1-lambda_1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283-lambda_1%2C5%29%2C%281%2C-1-lambda_1%29%5D&fg=000000&font=TeX&svg=1 "[(3-lambda_1,5),(1,-1-lambda_1)]")
![[(3-4,5),(1,-1-4) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283-4%2C5%29%2C%281%2C-1-4%29%20%5D&fg=000000&font=TeX&svg=1 "[(3-4,5),(1,-1-4) ]")
![[(-1,5),(1,-5) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-1%2C5%29%2C%281%2C-5%29%20%5D&fg=000000&font=TeX&svg=1 "[(-1,5),(1,-5) ]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(-1,5,|,0),(1,-5,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-1%2C5%2C%7C%2C0%29%2C%281%2C-5%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(-1,5,|,0),(1,-5,|,0) ]")

![[(1,-5,|,0),(-1,5,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C-5%2C%7C%2C0%29%2C%28-1%2C5%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,-5,|,0),(-1,5,|,0) ]")

The second column lacks a leading 1, and therefore


Thus the general solution is ![bb(u_1)=[(u_1),(u_2)]=t[(5),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u_1%29%3D%5B%28u_1%29%2C%28u_2%29%5D%3Dt%5B%285%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb(u_1)=[(u_1),(u_2)]=t[(5),(1)]")

")
![=[(5),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%285%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "=[(5),(1)]")
For
![[(3-lambda_2,5),(1,-1-lambda_2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283-lambda_2%2C5%29%2C%281%2C-1-lambda_2%29%5D&fg=000000&font=TeX&svg=1 "[(3-lambda_2,5),(1,-1-lambda_2)]")
![[(3+2,5),(1,-1+2) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283%2B2%2C5%29%2C%281%2C-1%2B2%29%20%5D&fg=000000&font=TeX&svg=1 "[(3+2,5),(1,-1+2) ]")
![[(5,5),(1,1) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%285%2C5%29%2C%281%2C1%29%20%5D&fg=000000&font=TeX&svg=1 "[(5,5),(1,1) ]")
Similarly, to solve the system, we form the augmented matrix and bring it to RREF using row operations.
The general solution is
where ")
![=[(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "=[(-1),(1)]")
Both eigenvalues are simple eigenvalues with the algebraic multiplicity of one and therefore their eigenvectors are linearly independent.
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=244
For the given matrix, a) find the characteristic polynomial of the matrix and b) all the eigenvalues and their associated eigenvectors.
![=[(-7,-1),(5,-9)] -lambda[(1,0),(0,1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-7%2C-1%29%2C%285%2C-9%29%5D%20-lambda%5B%281%2C0%29%2C%280%2C1%29%5D&fg=000000&font=TeX&svg=1 "=[(-7,-1),(5,-9)] -lambda[(1,0),(0,1)]")
Thus the characteristic polynomial of
Completing the square, we get
b) The roots of
Next, to find the corresponding eigenvectors, we follow the same steps as we did for the previous example, solving system
We find the eigenvector associated with 
![[(-7-(-8-2i),-1),(5,-9-(-8-2i)) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-7-%28-8-2i%29%2C-1%29%2C%285%2C-9-%28-8-2i%29%29%20%5D&fg=000000&font=TeX&svg=1 "[(-7-(-8-2i),-1),(5,-9-(-8-2i)) ]")
![[(1+2i,-1),(5,-1+2i) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2B2i%2C-1%29%2C%285%2C-1%2B2i%29%20%5D&fg=000000&font=TeX&svg=1 "[(1+2i,-1),(5,-1+2i) ]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(1+2i,-1 ,|,0),(5,-1+2i ,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2B2i%2C-1%20%2C%7C%2C0%29%2C%285%2C-1%2B2i%20%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1+2i,-1 ,|,0),(5,-1+2i ,|,0) ]")


![[(5,-1+2i ,|,0) ,(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%285%2C-1%2B2i%20%2C%7C%2C0%29%20%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(5,-1+2i ,|,0) ,(0,0,|,0) ]")

The second column lacks a leading 1, and therefore
u_2=0")

Therefore, the eigenvectors corresponding to eigenvalue ![bb(u_1)=t[(1/5-2/5i ),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u_1%29%3Dt%5B%281%2F5-2%2F5i%20%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb(u_1)=t[(1/5-2/5i ),(1)]")


![bb(u_1)=[(1-2i),(5)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u_1%29%3D%5B%281-2i%29%2C%285%29%5D&fg=000000&font=TeX&svg=1 "bb(u_1)=[(1-2i),(5)]")
The eigenvector corresponding to the conjugate eigenvalue is the conjugate of eigenvector 
Both eigenvalues are simple eigenvalues with the algebraic multiplicity of one and therefore their eigenvectors are linearly independent.
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=244
For the given matrix, a) find the characteristic polynomial of the matrix and b) all the eigenvalues and their associated eigenvectors.
![=[(0,6,-2),(0,-2,0),(1,3,-3)] -lambda[(1,0,0),(0,1,0),(0,0,1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%280%2C6%2C-2%29%2C%280%2C-2%2C0%29%2C%281%2C3%2C-3%29%5D%20-lambda%5B%281%2C0%2C0%29%2C%280%2C1%2C0%29%2C%280%2C0%2C1%29%5D&fg=000000&font=TeX&svg=1 "=[(0,6,-2),(0,-2,0),(1,3,-3)] -lambda[(1,0,0),(0,1,0),(0,0,1)]")
Thus the characteristic polynomial of
The roots of =-2")

To find the corresponding eigenvectors, we need to find the solution to the system
For
,(0,-2-lambda,0) ,(1,3,-3-lambda) |")
,(0,-2+2,0) ,(1,3,-3+2) |")
,(0,0,0) ,(1,3,-1) |")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.


,(2,6,-2) ,(0,0,0) |")

The second and third columns lack a leading 1, and therefore 


Then, the eigenvector )")
![bb(u_(1,2))=[(u_1),(u_2),(u_3)]=[(-3s+t),(s),(t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u_%281%2C2%29%29%3D%5B%28u_1%29%2C%28u_2%29%2C%28u_3%29%5D%3D%5B%28-3s%2Bt%29%2C%28s%29%2C%28t%29%5D&fg=000000&font=TeX&svg=1 "bb(u_(1,2))=[(u_1),(u_2),(u_3)]=[(-3s+t),(s),(t)]")
![=s[(-3),(1),(0)]+t[(1),(0),(1)],](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Ds%5B%28-3%29%2C%281%29%2C%280%29%5D%2Bt%5B%281%29%2C%280%29%2C%281%29%5D%2C&fg=000000&font=TeX&svg=1 "=s[(-3),(1),(0)]+t[(1),(0),(1)],")

where ![{[(-3),(1),(0)], \ [(1),(0),(1)]}](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%7B%5B%28-3%29%2C%281%29%2C%280%29%5D%2C%20%5C%20%5B%281%29%2C%280%29%2C%281%29%5D%7D&fg=000000&font=TeX&svg=1 "{[(-3),(1),(0)], \ [(1),(0),(1)]}")
Therefore, the basic eigenvectors associated with eigenvalue ")
![bb(u_1)=[(-3),(1),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u_1%29%3D%5B%28-3%29%2C%281%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "bb(u_1)=[(-3),(1),(0)]")
![bb(u_2)= [(1),(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u_2%29%3D%20%5B%281%29%2C%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb(u_2)= [(1),(0),(1)]")
For
,(0,-1,0) ,(1,3,-2) |")
Similarly, we form the augmented matrix and bring it to RREF using row operations.


,(0,1,0) ,(0,-3,0) |")

,(0,1,0) ,(0,0,0) |")

The third column lacks a leading 1, and therefore


Then, the eigenvector ")
![bb(u_3)=[(u_1),(u_2),(u_3)]=[(2t),(0),(t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u_3%29%3D%5B%28u_1%29%2C%28u_2%29%2C%28u_3%29%5D%3D%5B%282t%29%2C%280%29%2C%28t%29%5D&fg=000000&font=TeX&svg=1 "bb(u_3)=[(u_1),(u_2),(u_3)]=[(2t),(0),(t)]")
![=t[(2),(0),(1)],](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dt%5B%282%29%2C%280%29%2C%281%29%5D%2C&fg=000000&font=TeX&svg=1 "=t[(2),(0),(1)],")
, the eigenvectors corresponding to is ![=[(2),(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%282%29%2C%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "=[(2),(0),(1)]") .
.
For both eigenvalues, the algebraic multiplicity equals the geometric multiplicity and thus their eigenvectors are linearly independent.
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=244
![[(0,-5),(4,6)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%280%2C-5%29%2C%284%2C6%29%5D&fg=000000&font=TeX&svg=1 "[(0,-5),(4,6)]")
=")
![[(5,2,8),(-4,-1,-16),(0,0,3)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%285%2C2%2C8%29%2C%28-4%2C-1%2C-16%29%2C%280%2C0%2C3%29%5D&fg=000000&font=TeX&svg=1 "[(5,2,8),(-4,-1,-16),(0,0,3)]") .
.
![lambda_1=1, \ bb(v_1)=[(-1),(2),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=lambda_1%3D1%2C%20%5C%20bb%28v_1%29%3D%5B%28-1%29%2C%282%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "lambda_1=1, \ bb(v_1)=[(-1),(2),(0)]")
![lambda_(2,3)=3, \ bb(v_2)=[(-1),(1),(0)], \ bb(v_3)=[(-4),(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=lambda_%282%2C3%29%3D3%2C%20%5C%20bb%28v_2%29%3D%5B%28-1%29%2C%281%29%2C%280%29%5D%2C%20%5C%20bb%28v_3%29%3D%5B%28-4%29%2C%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "lambda_(2,3)=3, \ bb(v_2)=[(-1),(1),(0)], \ bb(v_3)=[(-4),(0),(1)]")
![[(-5,-4),(14,10)].](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-5%2C-4%29%2C%2814%2C10%29%5D.&fg=000000&font=TeX&svg=1 "[(-5,-4),(14,10)].")
![lambda_1=3, \ bb(v_1)=[(1),(-2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=lambda_1%3D3%2C%20%5C%20bb%28v_1%29%3D%5B%281%29%2C%28-2%29%5D&fg=000000&font=TeX&svg=1 "lambda_1=3, \ bb(v_1)=[(1),(-2)]")
![lambda_2=2, \ bb(v_2)=[(4),(-7)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=lambda_2%3D2%2C%20%5C%20bb%28v_2%29%3D%5B%284%29%2C%28-7%29%5D&fg=000000&font=TeX&svg=1 "lambda_2=2, \ bb(v_2)=[(4),(-7)]")
After exploring first-order and second-order differential equations, we now turn our attention to systems of differential equations. These systems are instrumental in modeling scenarios with multiple interdependent processes, common in complex real-world situations.
For instance, in an ecosystem with interacting species like prey and predators, the rate of change in each species’ population depends not only on its size but also on the populations of other species. This interaction leads to a system of differential equations where each equation represents the growth rate of one species, encapsulating their interrelations. Similarly, in mixing problems with interconnected tanks, the concentration in one tank affects and is affected by concentrations in connected tanks. In mechanical systems, such as a mass-spring system with multiple masses and springs, each mass’s displacement is influenced by its neighbors, forming a system of interconnected differential equations.
In this section, we introduce the matrix method for solving systems of linear first-order differential equations. These systems are characterized by each equation being first-order and linear. Such systems can be written in the following form.
Matrix notation simplifies the characterization and solution of these systems, similar to how systems of algebraic equations are handled. A linear first-order system can be expressed in matrix form as
![[[y'_1],[y'_2], [vdots] ,[y'_n] ]=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5By%27_1%5D%2C%5By%27_2%5D%2C%20%5Bvdots%5D%20%2C%5By%27_n%5D%20%5D%3D&fg=000000&font=TeX&svg=1 "[[y'_1],[y'_2], [vdots] ,[y'_n] ]=")
![[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5Ba_11%2C%20a_12%20%2C...%2C%20a_%281n%29%5D%2C%5Ba_21%2Ca_22%2C%20...%2C%20a_%282n%29%5D%2C%20%5Bvdots%2Cvdots%20%2Cddots%2C%20vdots%5D%20%2C%5Ba_%28n1%29%2C%20a_%28n2%29%20%2C%20...%2C%20a_%28n%5Cn%29%5D%20%5D&fg=000000&font=TeX&svg=1 "[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]")
![[[y_1],[y_2], [vdots] ,[y_n] ]+](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5By_1%5D%2C%5By_2%5D%2C%20%5Bvdots%5D%20%2C%5By_n%5D%20%5D%2B&fg=000000&font=TeX&svg=1 "[[y_1],[y_2], [vdots] ,[y_n] ]+")
In vector notation, the system is written as
Here matrix ")
)=0")
An initial value problem involves finding a solution for
 = A(t)bb(y) + bb(f)(t),")
(t_0) = bb(k)")
where 
Write the given system of differential equations in matrix form.
The system can be written in matrix form as
An initial value problem for the system can be written as
![bb"y'"=[(2,1),(1,1)]bb"y"+[(-3),(1)]e^(2t),](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%27%22%3D%5B%282%2C1%29%2C%281%2C1%29%5Dbb%22y%22%2B%5B%28-3%29%2C%281%29%5De%5E%282t%29%2C&fg=000000&font=TeX&svg=1 "bb\"y'\"=[(2,1),(1,1)]bb\"y\"+[(-3),(1)]e^(2t),")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=247
Existence and Uniqueness Theorem. If the coefficient matrix ")
bb\"y\"+bb\"f\"(t),")
a) Verify that
is a solution to the following system for any values of
b) Find the solution to the initial condition
![bb"y'"=[(-4,-10),(3,7)]bb"y",](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%27%22%3D%5B%28-4%2C-10%29%2C%283%2C7%29%5Dbb%22y%22%2C&fg=000000&font=TeX&svg=1 "bb\"y'\"=[(-4,-10),(3,7)]bb\"y\",")
a) If ")
=bb(y)'")


![c_1[(-4,-10),(3,7)][(-5),(3)]e^(2t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1%5B%28-4%2C-10%29%2C%283%2C7%29%5D%5B%28-5%29%2C%283%29%5De%5E%282t%29&fg=000000&font=TeX&svg=1 "c_1[(-4,-10),(3,7)][(-5),(3)]e^(2t)")
![=c_1[(-10),(6)]e^(2t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dc_1%5B%28-10%29%2C%286%29%5De%5E%282t%29&fg=000000&font=TeX&svg=1 "=c_1[(-10),(6)]e^(2t)")

'=")
b) Since the coefficient matrix is continuous for all real numbers
![c_1[(-5),(3)]e^(0)+c_2[(2),(-1)]e^(0)=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1%5B%28-5%29%2C%283%29%5De%5E%280%29%2Bc_2%5B%282%29%2C%28-1%29%5De%5E%280%29%3D&fg=000000&font=TeX&svg=1 "c_1[(-5),(3)]e^(0)+c_2[(2),(-1)]e^(0)=")
![[(-5c_1+2c_2),(3c_1-c_2)]=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-5c_1%2B2c_2%29%2C%283c_1-c_2%29%5D%3D&fg=000000&font=TeX&svg=1 "[(-5c_1+2c_2),(3c_1-c_2)]=")
This yields a system of two equations in two variables
Solving the system yields

Therefore the solution to the initial value problem is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=247
Higher-degree differential equations can be transformed into systems of first-order differential equations. This conversion allows complex, higher-order problems to be analyzed using techniques and tools developed for first-order systems. This approach is widely used in numerical methods and theoretical analysis in various scientific and engineering applications. Here’s a step-by-step guide to this process.
-th Order Differential Equations into a System of First-Order EquationsConsider a linear
1. Introduce New Variables: Introduce
2. Express the Derivatives: Express the derivatives of these new variables in terms of the original differential equation.
Observe that the last equation is the original equation that is rearranged for the highest derivative of
3. Write the System of First-Order Equations: You now have a system of
Write the given 2nd-order differential equation as a system of first-order linear differential equations.
,")
1. Introduce a new variable 


2. Express the derivatives by differentiating the above equations and rearrange the original differential equation to isolate

-2/3y'+2y")

We also express the initial conditions in terms of the new variables:
3. The system of first-order equations is then
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=247
 .
.
As a single second-order differential equation for
We start with studying the homogeneous linear system
where 
Theorem. If 

Revisiting Section 6.2 on linear independence, vectors 

![[[y_11, y_12 ,..., y_(1n)],[y_21,y_22, ..., y_(2n)], [vdots,vdots ,ddots, vdots] ,[y_(n1), y_(n2) , ..., y_(n\n)] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5By_11%2C%20y_12%20%2C...%2C%20y_%281n%29%5D%2C%5By_21%2Cy_22%2C%20...%2C%20y_%282n%29%5D%2C%20%5Bvdots%2Cvdots%20%2Cddots%2C%20vdots%5D%20%2C%5By_%28n1%29%2C%20y_%28n2%29%20%2C%20...%2C%20y_%28n%5Cn%29%5D%20%5D&fg=000000&font=TeX&svg=1 "[[y_11, y_12 ,..., y_(1n)],[y_21,y_22, ..., y_(2n)], [vdots,vdots ,ddots, vdots] ,[y_(n1), y_(n2) , ..., y_(n\n)] ]")
then
For this to be the only solution (unique solution), the determinant of the matrix of coefficient of the equation whose columns are the vector functions ![[(bb"y"_1,bb"y"_2, ..., bb"y"_n)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28bb%22y%22_1%2Cbb%22y%22_2%2C%20...%2C%20bb%22y%22_n%29%5D&fg=000000&font=TeX&svg=1 "[(bb\"y\"_1,bb\"y\"_2, ..., bb\"y\"_n)]")
")
Theorem. If the Wronkian ")
=")
![[(bb"y"_1,bb"y"_2, ..., bb"y"_n)]=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28bb%22y%22_1%2Cbb%22y%22_2%2C%20...%2C%20bb%22y%22_n%29%5D%3D&fg=000000&font=TeX&svg=1 "[(bb\"y\"_1,bb\"y\"_2, ..., bb\"y\"_n)]=")
Given the vector functions
![bb"y"_1=[(-2),(3)]e^(3t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22_1%3D%5B%28-2%29%2C%283%29%5De%5E%283t%29&fg=000000&font=TeX&svg=1 "bb\"y\"_1=[(-2),(3)]e^(3t)")
are solutions to a 
=|bb\"y\"_1 \ \ bb\"y\"_2|")
,-2e^t),(3e^(3t),-e^t)|")
+6e^(4t)")
")
b) Since !=0")
Thus the general solution is

![=c_1[(-2),(3)]e^(3t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dc_1%5B%28-2%29%2C%283%29%5De%5E%283t%29&fg=000000&font=TeX&svg=1 "=c_1[(-2),(3)]e^(3t)")
![+c_2[(-2),(-1)]e^(t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2Bc_2%5B%28-2%29%2C%28-1%29%5De%5E%28t%29&fg=000000&font=TeX&svg=1 "+c_2[(-2),(-1)]e^(t)")
![=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-2e%5E%283t%29%2C-2e%5Et%29%2C%283e%5E%283t%29%2C-e%5Et%29%5D&fg=000000&font=TeX&svg=1 "=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=250
In our quest to find solutions to homogeneous systems with constant coefficients, represented by system 6.5.1, we apply a similar approach to that used in solving homogeneous linear differential equations with constant coefficients.
Recall from Section 3.2 that we guessed a nontrivial solution of the form ")
Here, ")
After canceling the exponential term ")
Rearranging this equation leads to
This is the characteristic equation used to find the eigenvalues and eigenvectors of matrix  = e^(rt)mathbf(u)")
Therefore, to solve system 6.5.1, we first find the eigenvalues and eigenvectors of the coefficient matrix
![bb"y"_1=[(-5),(6)]e^(-t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22_1%3D%5B%28-5%29%2C%286%29%5De%5E%28-t%29&fg=000000&font=TeX&svg=1 "bb\"y\"_1=[(-5),(6)]e^(-t)")
are solutions to a
=-23 e^(3t)")
![bb"y"_1=[(-1),(-1)]e^(4t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22_1%3D%5B%28-1%29%2C%28-1%29%5De%5E%284t%29&fg=000000&font=TeX&svg=1 "bb\"y\"_1=[(-1),(-1)]e^(4t)")
are solutions to a
=-5")
In Section 6.5, we explored how solutions to homogeneous systems with constant coefficients
are in the form
where 
In this section, we focus on the case where the eigenvalues of matrix
Theorem: If an 




In this context, the solutions for each eigenvalue take the form 

Consequently, the general solution to the system can be expressed as a linear combination of these individual solutions.
where
Find a general solution of
1. First we need to find the eigenvalues of the coefficient matrix
The characteristic polynomial of
The roots of 

2. Next to find the corresponding eigenvectors, we need to find the solution to the equation bb\"u\"=bb\"0\"")
For
![[(-5+6,3),(-1,-5+2) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-5%2B6%2C3%29%2C%28-1%2C-5%2B2%29%20%5D&fg=000000&font=TeX&svg=1 "[(-5+6,3),(-1,-5+2) ]")
![[(1,3),(-1,-3) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C3%29%2C%28-1%2C-3%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,3),(-1,-3) ]")
Therefore, the eigenvectors corresponding to ![bb"u"_1=t[(-3),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3Dt%5B%28-3%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=t[(-3),(1)]")

![=[(-3),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-3%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "=[(-3),(1)]")
For
![[(-3+6,3),(-1,-3+2) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-3%2B6%2C3%29%2C%28-1%2C-3%2B2%29%20%5D&fg=000000&font=TeX&svg=1 "[(-3+6,3),(-1,-3+2) ]")
![[(3,3),(-1,-1) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283%2C3%29%2C%28-1%2C-1%29%20%5D&fg=000000&font=TeX&svg=1 "[(3,3),(-1,-1) ]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(3,3,|,0),(-1,-1,|,0) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283%2C3%2C%7C%2C0%29%2C%28-1%2C-1%2C%7C%2C0%29%20%5D~&fg=000000&font=TeX&svg=1 "[(3,3,|,0),(-1,-1,|,0) ]~")
Therefore, the eigenvectors corresponding to ![bb"u"_2=t[(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_2%3Dt%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_2=t[(-1),(1)]")

3. A general solution to the system is given by Equation 6.6.2.
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=253
Solve the system of differential equations with the given initial values.
,(y_2' = 2 y_1 -7 y_2):},")
1. We first express the system in the matrix notation.
![bb"y"'=[(4,-15),(2,-7) ]bb"y",](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%284%2C-15%29%2C%282%2C-7%29%20%5Dbb%22y%22%2C&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(4,-15),(2,-7) ]bb\"y\",")
2. Next, we find the eigenvalues of
The characteristic polynomial of the coefficient matrix
The roots of 
3. We then find the corresponding eigenvectors.
For
![[(4+1,-15),(2,-7+1) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%284%2B1%2C-15%29%2C%282%2C-7%2B1%29%20%5D&fg=000000&font=TeX&svg=1 "[(4+1,-15),(2,-7+1) ]")
![[(5,-15),(2,-6) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%285%2C-15%29%2C%282%2C-6%29%20%5D&fg=000000&font=TeX&svg=1 "[(5,-15),(2,-6) ]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(5,-15,|,0),(2,-6,|,0) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%285%2C-15%2C%7C%2C0%29%2C%282%2C-6%2C%7C%2C0%29%20%5D~&fg=000000&font=TeX&svg=1 "[(5,-15,|,0),(2,-6,|,0) ]~")
Therefore, the eigenvectors corresponding to ![bb"u"_1=t[(3),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3Dt%5B%283%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=t[(3),(1)]")
![=[(3),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%283%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "=[(3),(1)]")
For
![[(4+2,-15),(2,-7+2) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%284%2B2%2C-15%29%2C%282%2C-7%2B2%29%20%5D&fg=000000&font=TeX&svg=1 "[(4+2,-15),(2,-7+2) ]")
![[(6,-15),(2,-5) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%286%2C-15%29%2C%282%2C-5%29%20%5D&fg=000000&font=TeX&svg=1 "[(6,-15),(2,-5) ]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(6,-15,|,0),(2,-5,|,0) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%286%2C-15%2C%7C%2C0%29%2C%282%2C-5%2C%7C%2C0%29%20%5D~&fg=000000&font=TeX&svg=1 "[(6,-15,|,0),(2,-5,|,0) ]~")
Therefore, the eigenvectors corresponding to ![bb"u"_2=t[(5/2),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_2%3Dt%5B%285%2F2%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_2=t[(5/2),(1)]")

![=[(5),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%285%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "=[(5),(2)]")
4. A general solution to the system is given by Equation 6.6.2.
5. Finally, we apply the initial conditions to find constants
![[(3c_1+5c_2),(c_1+2c_2)]=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283c_1%2B5c_2%29%2C%28c_1%2B2c_2%29%5D%3D&fg=000000&font=TeX&svg=1 "[(3c_1+5c_2),(c_1+2c_2)]=")
This gives a system of two equations and two unknowns.
Solving the system yields

Therefore the solution to the initial value problem is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=253
Solve the system of differential equations with the given initial values.
,(y_2' = 11 y_2 -7 y_3),(y_3' = 14 y_2 -10 y_3) :},")
1. We first express the system in the matrix notation.
![bb"y"'=[(3,14,-13),(0,11,-7),(0,14,-10) ]bb"y",](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%283%2C14%2C-13%29%2C%280%2C11%2C-7%29%2C%280%2C14%2C-10%29%20%5Dbb%22y%22%2C&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(3,14,-13),(0,11,-7),(0,14,-10) ]bb\"y\",")
2. Next, we find the eigenvalues of the coefficient matrix
The characteristic polynomial of
The roots of 


3. We then find the corresponding eigenvectors.
For
![=[(0,14,-13),(0,8,-7),(0,14,-13)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%280%2C14%2C-13%29%2C%280%2C8%2C-7%29%2C%280%2C14%2C-13%29%5D&fg=000000&font=TeX&svg=1 "=[(0,14,-13),(0,8,-7),(0,14,-13)]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(0,14,-13,|,0),(0,8,-7,|,0),(0,14,-13,|,0)]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%280%2C14%2C-13%2C%7C%2C0%29%2C%280%2C8%2C-7%2C%7C%2C0%29%2C%280%2C14%2C-13%2C%7C%2C0%29%5D~&fg=000000&font=TeX&svg=1 "[(0,14,-13,|,0),(0,8,-7,|,0),(0,14,-13,|,0)]~")
Therefore, the eigenvectors corresponding to ![bb"u"_1=t[(1),(0),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3Dt%5B%281%29%2C%280%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=t[(1),(0),(0)]")
![=[(1),(0),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%281%29%2C%280%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "=[(1),(0),(0)]")
For
![=[(-1,14,-13),(0,7,-7),(0,14,-14)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-1%2C14%2C-13%29%2C%280%2C7%2C-7%29%2C%280%2C14%2C-14%29%5D&fg=000000&font=TeX&svg=1 "=[(-1,14,-13),(0,7,-7),(0,14,-14)]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(-1,14,-13),(0,7,-7),(0,14,-14)]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-1%2C14%2C-13%29%2C%280%2C7%2C-7%29%2C%280%2C14%2C-14%29%5D~&fg=000000&font=TeX&svg=1 "[(-1,14,-13),(0,7,-7),(0,14,-14)]~")
Thus, the eigenvectors corresponding to ![bb"u"_2=t[(1),(1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_2%3Dt%5B%281%29%2C%281%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_2=t[(1),(1),(1)]")
![=[(1),(1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%281%29%2C%281%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "=[(1),(1),(1)]")
For
![=[(6,14,-13),(0,14,-7),(0,14,-7)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%286%2C14%2C-13%29%2C%280%2C14%2C-7%29%2C%280%2C14%2C-7%29%5D&fg=000000&font=TeX&svg=1 "=[(6,14,-13),(0,14,-7),(0,14,-7)]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(6,14,-13),(0,14,-7),(0,14,-7)]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%286%2C14%2C-13%29%2C%280%2C14%2C-7%29%2C%280%2C14%2C-7%29%5D~&fg=000000&font=TeX&svg=1 "[(6,14,-13),(0,14,-7),(0,14,-7)]~")
Therefore, the eigenvectors corresponding to ![bb"u"_3=t[(1),(1/2),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_3%3Dt%5B%281%29%2C%281%2F2%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_3=t[(1),(1/2),(1)]")

![=[(2),(1),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%282%29%2C%281%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "=[(2),(1),(2)]")
4. A general solution to the system is given by Equation 6.6.2.
5. Finally, we apply the initial conditions to find constants
This gives a system of three equations and three unknowns.
Solving the system yields


Therefore the solution to the initial value problem is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=253
In Section 6.4, we explored how higher-order linear differential equations can be converted into systems of first-order linear equations. This transformation, coupled with the matrix method offers several advantages, like better organization of the problem and ease of computation. While this approach might not always be shorter than the characteristic polynomial method discussed in Section 3.2, especially for solving homogeneous second-order differential equations with constant coefficients, it is beneficial to understand this process. To illustrate how it is applied, let’s work through an example.
Convert the given differential equation to a linear first-order system and find the solution.

a. Converting the equation to a system:
1a. Introduce a new variable
2a. Express the derivatives by differentiating the above equations and rearrange the original differential equation to isolate

We also express the initial conditions in terms of the new variables:
3a. The system of first-order equations is then

=-3, \ x_2(0)=-13")
1b. We express the system in the matrix form.
![bb"x"'=[(0,1),(10,-3) ]bb"x",](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22x%22%27%3D%5B%280%2C1%29%2C%2810%2C-3%29%20%5Dbb%22x%22%2C&fg=000000&font=TeX&svg=1 "bb\"x\"'=[(0,1),(10,-3) ]bb\"x\",")
2b. Next, we find the eigenvalues of the coefficient matrix
The characteristic polynomial of
The roots of 

3b. We then find the corresponding eigenvectors.
For
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
Therefore, the eigenvectors corresponding to ![bb"u"_1=t[(1/2),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3Dt%5B%281%2F2%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=t[(1/2),(1)]")
![=[(1),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%281%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "=[(1),(2)]")
For
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
Therefore, the eigenvectors corresponding to ![bb"u"_2=t[(-1/5),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_2%3Dt%5B%28-1%2F5%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_2=t[(-1/5),(1)]")
![=[(-1),(5)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-1%29%2C%285%29%5D&fg=000000&font=TeX&svg=1 "=[(-1),(5)]")
4b. A general solution to the system is given by Equation 6.6.2.
5b. We apply the initial conditions to find constants
![[(c_1-c_2),(2c_1+5c_2)]=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28c_1-c_2%29%2C%282c_1%2B5c_2%29%5D%3D&fg=000000&font=TeX&svg=1 "[(c_1-c_2),(2c_1+5c_2)]=")
This gives a system of two equations and two unknowns.
Solving the system yields
Therefore the solution to the initial value problem is
c. Determining the solution to the original equation
Given ![bb"x"(t)=[(x_1),(x_2)]=[(y),(y')]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22x%22%28t%29%3D%5B%28x_1%29%2C%28x_2%29%5D%3D%5B%28y%29%2C%28y%27%29%5D&fg=000000&font=TeX&svg=1 "bb\"x\"(t)=[(x_1),(x_2)]=[(y),(y')]")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=253
,(y_2' = 2 y_1 -3 y_2):},")
![bb"y"'=[(1,-12,7),(0,-10,6),(0,-12,8)] bb"y",](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%281%2C-12%2C7%29%2C%280%2C-10%2C6%29%2C%280%2C-12%2C8%29%5D%20bb%22y%22%2C&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(1,-12,7),(0,-10,6),(0,-12,8)] bb\"y\",")
In this section, we examine solutions to the homogeneous system with constant coefficients 



bb\"u\"")
Theorem. If an 
The general solution to the system is then given by
where
Find a general solution of
1. First we need to find the eigenvalues of
The characteristic polynomial of the coefficient matrix
Therefore, the roots of 
2. Next we find the corresponding eigenvectors by finding the solution to the equation 
![[(5-(2+i3),6),(-3,-1-(2+i3)) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%285-%282%2Bi3%29%2C6%29%2C%28-3%2C-1-%282%2Bi3%29%29%20%5D&fg=000000&font=TeX&svg=1 "[(5-(2+i3),6),(-3,-1-(2+i3)) ]")
![[(3-i3,6),(-3,-3-i3) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283-i3%2C6%29%2C%28-3%2C-3-i3%29%20%5D&fg=000000&font=TeX&svg=1 "[(3-i3,6),(-3,-3-i3) ]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
Therefore, the eigenvectors corresponding to eigenvalue ![bb"u"_1=t[(-1-i),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3Dt%5B%28-1-i%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=t[(-1-i),(1)]")
![bb"u"_1=[(-1-i),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3D%5B%28-1-i%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=[(-1-i),(1)]")
The real part of ![bb"a"=[(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22a%22%3D%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"a\"=[(-1),(1)]")
![bb"b"=[(-1),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22b%22%3D%5B%28-1%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "bb\"b\"=[(-1),(0)]")
The eigenvector corresponding to the conjugate eigenvalue is the conjugate of eigenvector 
![bb"u"_2=[(-1+i),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_2%3D%5B%28-1%2Bi%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_2=[(-1+i),(1)]")
3. Therefore, a general solution to the system is given by Equation 6.7.1.
![bb"y"(t)=c_1e^(2t)([(-1),(1)] cos(3t)-[(-1),(0)] sin(3 t))](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3Dc_1e%5E%282t%29%28%5B%28-1%29%2C%281%29%5D%20cos%283t%29-%5B%28-1%29%2C%280%29%5D%20sin%283%20t%29%29&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=c_1e^(2t)([(-1),(1)] cos(3t)-[(-1),(0)] sin(3 t))")
![=c_1e^(2t)([(-cos(3t)+sin(3t)),(cos(3t))] )](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dc_1e%5E%282t%29%28%5B%28-cos%283t%29%2Bsin%283t%29%29%2C%28cos%283t%29%29%5D%20%29&fg=000000&font=TeX&svg=1 "=c_1e^(2t)([(-cos(3t)+sin(3t)),(cos(3t))] )")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=256
Solve the system of differential equations with initial conditions
![bb"y"' = [[1,3],[-15,-11]] \ bb"y", \quad \ bb"y"(0) = [(-3), (12)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%20%3D%20%5B%5B1%2C3%5D%2C%5B-15%2C-11%5D%5D%20%5C%20bb%22y%22%2C%20%5Cquad%20%5C%20bb%22y%22%280%29%20%3D%20%5B%28-3%29%2C%20%2812%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"' = [[1,3],[-15,-11]] \ bb\"y\", \quad \ bb\"y\"(0) = [(-3), (12)]")
1. First we need to find the eigenvalues of
The characteristic polynomial of the coefficient matrix
Therefore, the roots of 
2. Next we find the corresponding eigenvectors by finding the solution to the equation bb\"u\"=bb\"0\"")

![[(1-lambda,3),(-15,-11-lambda) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281-lambda%2C3%29%2C%28-15%2C-11-lambda%29%20%5D&fg=000000&font=TeX&svg=1 "[(1-lambda,3),(-15,-11-lambda) ]")
![[(6+i3,3),(-15,-6+i3) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%286%2Bi3%2C3%29%2C%28-15%2C-6%2Bi3%29%20%5D&fg=000000&font=TeX&svg=1 "[(6+i3,3),(-15,-6+i3) ]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(6+i3,3,|,0),(-15,-6+i3,|,0) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%286%2Bi3%2C3%2C%7C%2C0%29%2C%28-15%2C-6%2Bi3%2C%7C%2C0%29%20%5D~&fg=000000&font=TeX&svg=1 "[(6+i3,3,|,0),(-15,-6+i3,|,0) ]~")
Therefore, the eigenvectors corresponding to eigenvalue ![bb"u"_1=t[(-2/5+i1/5),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3Dt%5B%28-2%2F5%2Bi1%2F5%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=t[(-2/5+i1/5),(1)]")
![bb"u"_1=[(-2+i),(5)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3D%5B%28-2%2Bi%29%2C%285%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=[(-2+i),(5)]")
The real part of ![bb"a"=[(-2),(5)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22a%22%3D%5B%28-2%29%2C%285%29%5D&fg=000000&font=TeX&svg=1 "bb\"a\"=[(-2),(5)]")
![bb"b"=[(1),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22b%22%3D%5B%281%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "bb\"b\"=[(1),(0)]")
The eigenvector corresponding to the conjugate eigenvalue is the conjugate of eigenvector 
![bb"u"_2=[(-2-i),(5)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_2%3D%5B%28-2-i%29%2C%285%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_2=[(-2-i),(5)]")
3. Therefore, a general solution to the system is given by Equation 6.7.1.
![bb"y"(t)=c_1e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3Dc_1e%5E%28-5t%29%28%5B%28-2%29%2C%285%29%5D%20cos%283t%29-%5B%281%29%2C%280%29%5D%20sin%283%20t%29%29&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=c_1e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))")
4. We apply the initial conditions to find constants
![c_1e^(0)([(-2),(5)] cos(0)-[(1),(0)] sin(0))](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1e%5E%280%29%28%5B%28-2%29%2C%285%29%5D%20cos%280%29-%5B%281%29%2C%280%29%5D%20sin%280%29%29&fg=000000&font=TeX&svg=1 "c_1e^(0)([(-2),(5)] cos(0)-[(1),(0)] sin(0))")
![+c_2e^(0)([(-2),(5)] sin(0)+[(1),(0)] cos(0)) =](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2Bc_2e%5E%280%29%28%5B%28-2%29%2C%285%29%5D%20sin%280%29%2B%5B%281%29%2C%280%29%5D%20cos%280%29%29%20%3D&fg=000000&font=TeX&svg=1 "+c_2e^(0)([(-2),(5)] sin(0)+[(1),(0)] cos(0)) =")
![c_1[(-2),(5)]+c_2[(1),(0)]=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1%5B%28-2%29%2C%285%29%5D%2Bc_2%5B%281%29%2C%280%29%5D%3D&fg=000000&font=TeX&svg=1 "c_1[(-2),(5)]+c_2[(1),(0)]=")
This gives a system of two equations and two unknowns.
Solving the system yields

Therefore the solution to the initial value problem is
![bb"y"(t)=12/5e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3D12%2F5e%5E%28-5t%29%28%5B%28-2%29%2C%285%29%5D%20cos%283t%29-%5B%281%29%2C%280%29%5D%20sin%283%20t%29%29&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=12/5e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=256
![bb"y"(t)=c_1e^(-t)([(-1),(1)]cos(6t)-[(1),(0)]sin(6t))+](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3Dc_1e%5E%28-t%29%28%5B%28-1%29%2C%281%29%5Dcos%286t%29-%5B%281%29%2C%280%29%5Dsin%286t%29%29%2B&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=c_1e^(-t)([(-1),(1)]cos(6t)-[(1),(0)]sin(6t))+")
![bb"y"' = [[4,2],[-29,-10]] \ bb"y", \quad \ bb"y"(0) = [(-2), (19)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%20%3D%20%5B%5B4%2C2%5D%2C%5B-29%2C-10%5D%5D%20%5C%20bb%22y%22%2C%20%5Cquad%20%5C%20bb%22y%22%280%29%20%3D%20%5B%28-2%29%2C%20%2819%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"' = [[4,2],[-29,-10]] \ bb\"y\", \quad \ bb\"y\"(0) = [(-2), (19)]")
![bb"y"' = [[2,1],[-17,-6]] \ bb"y", \quad \ bb"y"(0) = [(-2), (11)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%20%3D%20%5B%5B2%2C1%5D%2C%5B-17%2C-6%5D%5D%20%5C%20bb%22y%22%2C%20%5Cquad%20%5C%20bb%22y%22%280%29%20%3D%20%5B%28-2%29%2C%20%2811%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"' = [[2,1],[-17,-6]] \ bb\"y\", \quad \ bb\"y\"(0) = [(-2), (11)]")
In this section, we explore solutions to the homogeneous system with constant coefficients when the eigenvalues of the coefficient matrix are repeated. Specifically, we encounter a unique challenge when an eigenvalue’s algebraic multiplicity (the number of times it appears as a root of the characteristic polynomial) exceeds its geometric multiplicity (the number of linearly independent eigenvectors associated with it). This discrepancy necessitates a specific approach to find all the linearly independent solutions necessary for a complete solution to the system. Our focus here is on the case where an eigenvalue has an algebraic multiplicity of two but a geometric multiplicity of only one. In such situations, the concept of generalized eigenvectors becomes crucial to developing a comprehensive solution.
Consider a homogeneous system denoted as
where matrix
Theorem. If an
For an eigenvalue 

This generalized eigenvector mathbf{u} = mathbf{0}")
The solution for the eigenvalue
1. 
2. 
The general solution to the system 6.8.1 combines these solutions.
where
Solve the system of differential equations with the given initial values.
![bb"y'"=[(3,-1),(1,5)]bb"y",](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%27%22%3D%5B%283%2C-1%29%2C%281%2C5%29%5Dbb%22y%22%2C&fg=000000&font=TeX&svg=1 "bb\"y'\"=[(3,-1),(1,5)]bb\"y\",")
1. First we need to find the eigenvalues of the coefficient matrix
The characteristic polynomial of
The characteristic polynomial =4")
2. To find the corresponding standard eigenvectors, we need to find the solution to the equation
For
![=[(3-4,-1),(1,5-4)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%283-4%2C-1%29%2C%281%2C5-4%29%5D&fg=000000&font=TeX&svg=1 "=[(3-4,-1),(1,5-4)]")
![[(-1,-1),(1,1) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-1%2C-1%29%2C%281%2C1%29%20%5D&fg=000000&font=TeX&svg=1 "[(-1,-1),(1,1) ]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
Therefore, the eigenvectors corresponding to ![bb"u"_1=t[(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3Dt%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=t[(-1),(1)]")
3. We need to find a generalized eigenvector
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
The solution to this is ![bb"v"=[(1-t),(t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22v%22%3D%5B%281-t%29%2C%28t%29%5D&fg=000000&font=TeX&svg=1 "bb\"v\"=[(1-t),(t)]")

![=[(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "=[(0),(1)]")
4. A general solution to the system is given by Equation 6.8.2.
5. We apply the initial conditions to find constants
![c_1[(-1),(1)]+ c_2[(0),(1)]=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1%5B%28-1%29%2C%281%29%5D%2B%20c_2%5B%280%29%2C%281%29%5D%3D&fg=000000&font=TeX&svg=1 "c_1[(-1),(1)]+ c_2[(0),(1)]=")
This gives a system of two equations and two unknowns.
Solving the system gives

Therefore, the solution to the initial value problem is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=259
Solve the system of differential equations with the given initial values.
,(y_2' = 3 y_2 ),(y_3' = 5y_1- y_2 -2y_3) :},")
1. We first express the IVP in the matrix notation.
,")
where ![A=[(3,1,0),(0,3,0),(5,-1,-2) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%283%2C1%2C0%29%2C%280%2C3%2C0%29%2C%285%2C-1%2C-2%29%20%5D&fg=000000&font=TeX&svg=1 "A=[(3,1,0),(0,3,0),(5,-1,-2) ]")
2. We find the eigenvalues of the coefficient matrix
The characteristic polynomial of
The eigenvalues are 
=3")
3. To find the corresponding standard eigenvectors, we solve
For
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(5,1,0),(0,5,0),(5,-1,0) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%285%2C1%2C0%29%2C%280%2C5%2C0%29%2C%285%2C-1%2C0%29%20%5D~&fg=000000&font=TeX&svg=1 "[(5,1,0),(0,5,0),(5,-1,0) ]~")
Therefore, the eigenvectors corresponding to =-2")
![bb"u"_1=t[(0),(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3Dt%5B%280%29%2C%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=t[(0),(0),(1)]")
![=[(0),(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%280%29%2C%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "=[(0),(0),(1)]")
For
![=[(0,1,0),(0,0,0),(5,-1,-5) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%280%2C1%2C0%29%2C%280%2C0%2C0%29%2C%285%2C-1%2C-5%29%20%5D&fg=000000&font=TeX&svg=1 "=[(0,1,0),(0,0,0),(5,-1,-5) ]")
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(0,1,0,|,0),(0,0,0,|,0) ,(5,-1,-5,|,0) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%280%2C1%2C0%2C%7C%2C0%29%2C%280%2C0%2C0%2C%7C%2C0%29%20%2C%285%2C-1%2C-5%2C%7C%2C0%29%20%5D~&fg=000000&font=TeX&svg=1 "[(0,1,0,|,0),(0,0,0,|,0) ,(5,-1,-5,|,0) ]~")
Therefore, the eigenvectors corresponding to ![bb"u"_2=t[(1),(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_2%3Dt%5B%281%29%2C%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_2=t[(1),(0),(1)]")
![=[(1),(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%281%29%2C%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "=[(1),(0),(1)]")
For =3,")
")
_2")
4. Therefore, we need to find a generalized vector
To solve the system, we form the augmented matrix and bring it to RREF using row operations.
![[(0,1,0,|,1),(0,0,0,|,0),(5,-1,-5,|,1) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%280%2C1%2C0%2C%7C%2C1%29%2C%280%2C0%2C0%2C%7C%2C0%29%2C%285%2C-1%2C-5%2C%7C%2C1%29%20%5D~&fg=000000&font=TeX&svg=1 "[(0,1,0,|,1),(0,0,0,|,0),(5,-1,-5,|,1) ]~")
The solution to this is ![bb"v"=[(2/5+t),(1),(t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22v%22%3D%5B%282%2F5%2Bt%29%2C%281%29%2C%28t%29%5D&fg=000000&font=TeX&svg=1 "bb\"v\"=[(2/5+t),(1),(t)]")
![=[(2/5),(1),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%282%2F5%29%2C%281%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "=[(2/5),(1),(0)]")
5. Three linearly independent solutions of the system are
-For _1")
![bb(y)_1=e^(-2t)[(0),(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29_1%3De%5E%28-2t%29%5B%280%29%2C%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb(y)_1=e^(-2t)[(0),(0),(1)]")
-For
![bb(y)_2=e^(3t)[(1),(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29_2%3De%5E%283t%29%5B%281%29%2C%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb(y)_2=e^(3t)[(1),(0),(1)]")
-For
6. Therefore, a general solution to the system is given by the linear combination of the above solutions:
![bb(y)(t)=c_1e^(-2t)[(0),(0),(1)] +](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%28t%29%3Dc_1e%5E%28-2t%29%5B%280%29%2C%280%29%2C%281%29%5D%20%2B&fg=000000&font=TeX&svg=1 "bb(y)(t)=c_1e^(-2t)[(0),(0),(1)] +")
![c_2e^(3t)[(1),(0),(1)]+](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_2e%5E%283t%29%5B%281%29%2C%280%29%2C%281%29%5D%2B&fg=000000&font=TeX&svg=1 "c_2e^(3t)[(1),(0),(1)]+")
7. We apply the initial conditions to find the constants.
![c_1[(0),(0),(1)] +](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1%5B%280%29%2C%280%29%2C%281%29%5D%20%2B&fg=000000&font=TeX&svg=1 "c_1[(0),(0),(1)] +")
![c_2[(1),(0),(1)]+](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_2%5B%281%29%2C%280%29%2C%281%29%5D%2B&fg=000000&font=TeX&svg=1 "c_2[(1),(0),(1)]+")
![c_3[(2//5),(1),(0)]=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_3%5B%282%2F%2F5%29%2C%281%29%2C%280%29%5D%3D&fg=000000&font=TeX&svg=1 "c_3[(2//5),(1),(0)]=")
This gives a system of three equations and three unknowns.
Solving the system gives

Therefore, the solution to the initial value problem is
![bb(y)(t)=-e^(-2t)[(0),(0),(1)]-](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%28t%29%3D-e%5E%28-2t%29%5B%280%29%2C%280%29%2C%281%29%5D-&fg=000000&font=TeX&svg=1 "bb(y)(t)=-e^(-2t)[(0),(0),(1)]-")
![4e^(3t)[(1),(0),(1)]+](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=4e%5E%283t%29%5B%281%29%2C%280%29%2C%281%29%5D%2B&fg=000000&font=TeX&svg=1 "4e^(3t)[(1),(0),(1)]+")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=259
![bb"y"'=[(-3,1),(-1,-5)] bb"y"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%28-3%2C1%29%2C%28-1%2C-5%29%5D%20bb%22y%22&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(-3,1),(-1,-5)] bb\"y\"")
![bb"y"'=[(-6,2),(-2,-10)] bb"y"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%28-6%2C2%29%2C%28-2%2C-10%29%5D%20bb%22y%22&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(-6,2),(-2,-10)] bb\"y\"")
![bb"y"'=[(2,1,0),(0,2,0),(4,-3,-1)] bb"y"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%282%2C1%2C0%29%2C%280%2C2%2C0%29%2C%284%2C-3%2C-1%29%5D%20bb%22y%22&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(2,1,0),(0,2,0),(4,-3,-1)] bb\"y\"")
![bb(y)(t)=13e^(-t)[(0),(0),(1)]+](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%28t%29%3D13e%5E%28-t%29%5B%280%29%2C%280%29%2C%281%29%5D%2B&fg=000000&font=TeX&svg=1 "bb(y)(t)=13e^(-t)[(0),(0),(1)]+")
![7/2e^(2t)[(3),(0),(4)]-](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=7%2F2e%5E%282t%29%5B%283%29%2C%280%29%2C%284%29%5D-&fg=000000&font=TeX&svg=1 "7/2e^(2t)[(3),(0),(4)]-")
In this section, we study the nonhomogeneous linear system
where matrix '=Abb(y)")
The methods from Chapter 3, such as Undetermined Coefficients and Variation of Parameters, used for finding particular solutions to nonhomogeneous linear equations, can be extended to nonhomogeneous linear systems. We focus here on the method of Variation of Parameters.
The method of variation of parameters, as discussed in Section 3.5 for linear equations, applies to linear systems. It requires a fundamental set of solutions to the complementary (homogeneous) equation.
Theorem. Suppose an 
_p")
_1, bb(y)_2, ..., bb(y)_n}")
'=A(t)bb(y)")
(t)=bb(y)_p+bb(y)_c")
where _c=c_1bb(y)_1+c_2bb(y)_2+...+c_nbb(y)_n")
(t)=bb(y)_p+c_1bb(y)_1+c_2bb(y)_2+...+c_nbb(y)_n")
To find a particular solution to
1. Find a fundamental set of solutions
2. Form the fundamental matrix
3. Find the inverse of the fundamental matrix, ")
4. Determine
5. A particular solution to the system is given by
6. A general solution to the system is then
Find the general solution to the system
1. First we find a fundamental solution to the associated complementary (homogeneous) system.
The characteristic polynomial of the coefficient matrix
The roots of 
For
![[(6,3),(-6,-3) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%286%2C3%29%2C%28-6%2C-3%29%20%5D&fg=000000&font=TeX&svg=1 "[(6,3),(-6,-3) ]")
Therefore, the eigenvectors corresponding to ![bb"u"_1=t[(-1),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22u%22_1%3Dt%5B%28-1%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "bb\"u\"_1=t[(-1),(2)]")
For
![[(3,3),(-6,-6) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283%2C3%29%2C%28-6%2C-6%29%20%5D&fg=000000&font=TeX&svg=1 "[(3,3),(-6,-6) ]")
The eigenvectors corresponding to
Therefore, ![{e^(2t) [(-1),(2)], \ e^(-t) [(-1),(1)] }](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%7Be%5E%282t%29%20%5B%28-1%29%2C%282%29%5D%2C%20%5C%20e%5E%28-t%29%20%5B%28-1%29%2C%281%29%5D%20%7D&fg=000000&font=TeX&svg=1 "{e^(2t) [(-1),(2)], \ e^(-t) [(-1),(1)] }")
2. Thus the fundamental matrix
3. We determine
4. Determine ")
5. Then, a particular solution to the system is
6. Thus, a general solution to the system is
![=[(5-3e^t),(-6+5e^t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%285-3e%5Et%29%2C%28-6%2B5e%5Et%29%5D&fg=000000&font=TeX&svg=1 "=[(5-3e^t),(-6+5e^t)]")
Which can also be written as
![bb"y"=[(5-3e^t),(-6+5e^t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%3D%5B%285-3e%5Et%29%2C%28-6%2B5e%5Et%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"=[(5-3e^t),(-6+5e^t)]")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=262
Find the general solution to the system
The complementary system is
The forcing vector is
1. In Example 6.6.3 in Section 6.6, we found a fundamental solution set of the complementary system associated with the given system in this example.
2. The fundamental matrix
3. We determine
4. Determine (t)")
5. Then, a particular solution to the system is
![=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28e%5E%283t%29%2Ce%5E%284t%29%2C2e%5E%28-3t%29%29%2C%280%2Ce%5E%284t%29%2Ce%5E%28-3t%29%20%29%2C%280%2Ce%5E%284t%29%2C2e%5E%28-3t%29%20%29%20%5D&fg=000000&font=TeX&svg=1 "=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]")
6. Thus, a general solution to the system is
![bb(y)(t)=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))] +](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%28t%29%3D1%2F10%5B%28-10e%5E%28t%29-19e%5E%282t%29%29%2C%28-7e%5E%282t%29%29%2C%28-9e%5E%282t%29%29%5D%20%2B&fg=000000&font=TeX&svg=1 "bb(y)(t)=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))] +")
This can also be expressed as
![bb"y"=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%3D1%2F10%5B%28-10e%5E%28t%29-19e%5E%282t%29%29%2C%28-7e%5E%282t%29%29%2C%28-9e%5E%282t%29%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]")
![bb"y'"=[(-25,36),(-18,26)] bb"y"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%27%22%3D%5B%28-25%2C36%29%2C%28-18%2C26%29%5D%20bb%22y%22&fg=000000&font=TeX&svg=1 "bb\"y'\"=[(-25,36),(-18,26)] bb\"y\"")
![bb"y'"=[(5,3),(-6,-4)] bb"y"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%27%22%3D%5B%285%2C3%29%2C%28-6%2C-4%29%5D%20bb%22y%22&fg=000000&font=TeX&svg=1 "bb\"y'\"=[(5,3),(-6,-4)] bb\"y\"")
In this section, we revisit the application of differential equations in modeling engineering systems. In particular, we focus on mechanical vibrations and electrical circuits as two primary areas where systems of differential equations are applied.
Differential equations have a broad utility across various engineering fields. In chemical engineering, they are pivotal for modeling reaction kinetics and process dynamics. This includes scenarios such as mixing problems involving multiple tanks and substances, which are essential for reactor design and process optimization. In civil engineering, differential equation models are crucial for assessing the safety and longevity of structures subjected to diverse load conditions, such as in the earthquake resilience analysis of multi-story buildings. Aerospace engineering relies on these equations to simulate the movement of aircraft and spacecraft, incorporating both translational and rotational dynamics. This knowledge is instrumental in crafting control systems that enhance stability and maneuverability. Environmental engineering also employs differential equation models to track pollutant spread, providing a foundation for crafting effective environmental protection measures.
Kirchhoff’s laws, which we discussed in Section 2.5, serve as the foundation for deriving the governing equations. These laws facilitate the analysis of circuits by providing a systematic approach to calculating the currents and voltages at various points within the circuit. In more complex circuits, e.g., series-parallel circuits,
a) For the given electrical circuit diagram, derive the system of differential equations that describes the currents in various branches of the circuit. Assume that all initial currents are zero. b) Once the system of differential equations and initial conditions are established, solve the system for the currents in each branch of the circuit.
a) In Example 4.8.2, we previously examined this RL circuit and analyzed it using the Laplace Transform. In this example, we demonstrate solving the same circuit with the matrix method. The system equations for the circuit are given as follows, with initial conditions that all currents are zero at the time
b) Steps for solving the system:
1. System 6.10.1 is a mix of differential and algebraic equations. We first need to convert it into a system of linear differential equations by using the second equation to express 

,(I'_3=20I_2), (I_1-I_2-I_3=0) :}")
To create a system of linear differential equations from the given system, it’s important to address the fact that

The system is then simplified to
,(I'_3=20I_1-20I_3) :}")
=I_3(0)=0")
2. We then express the initial value problem (IVP) in matrix form.
![bb(I)'=[(-30,10),(20,-20)] bb(I)+[(60),(0)],](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28I%29%27%3D%5B%28-30%2C10%29%2C%2820%2C-20%29%5D%20bb%28I%29%2B%5B%2860%29%2C%280%29%5D%2C&fg=000000&font=TeX&svg=1 "bb(I)'=[(-30,10),(20,-20)] bb(I)+[(60),(0)],")
3. Next, we find a fundamental solution to the associated complementary (homogeneous) system. The characteristic polynomial of
The eigenvalues and the corresponding eigenvectors are

![bb(u)_1=[(1),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u%29_1%3D%5B%281%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "bb(u)_1=[(1),(2)]")

![bb(u)_1=[(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u%29_1%3D%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb(u)_1=[(-1),(1)]")
Therefore, ![{e^(-10t) [(1),(2)], \ e^(-40t) [(-1),(1)] }](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%7Be%5E%28-10t%29%20%5B%281%29%2C%282%29%5D%2C%20%5C%20e%5E%28-40t%29%20%5B%28-1%29%2C%281%29%5D%20%7D&fg=000000&font=TeX&svg=1 "{e^(-10t) [(1),(2)], \ e^(-40t) [(-1),(1)] }")
Thus the fundamental matrix ")
3. Next, we determine a particular solution to the system
(i) Determine
(ii) Determine
Then, a particular solution to the system is
4. Thus, a general solution to the system is
![=[(3),(3)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%283%29%2C%283%29%5D&fg=000000&font=TeX&svg=1 "=[(3),(3)]")
5. We apply the initial conditions to find the constants in the general solution.
![[(3),(3)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283%29%2C%283%29%5D&fg=000000&font=TeX&svg=1 "[(3),(3)]")
This gives a system of two equations and two unknowns.
Solving the system gives

Therefore, the solution to the initial value problem is
![bb(I)=[(3),(3)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28I%29%3D%5B%283%29%2C%283%29%5D&fg=000000&font=TeX&svg=1 "bb(I)=[(3),(3)]")
This results in the final expressions for
6. To find
-2e^(-40t)")
The analysis of mechanical vibrations is crucial in designing systems that are resilient to dynamic loads. A more realistic model that captures the essence of mechanical systems involves considering not only the masses and springs but also damping elements and external forces. This section focuses on a system consisting of two masses connected by springs in a horizontal arrangement, with the inclusion of damping and external forces acting on both masses. Such a model can represent a wide array of engineering applications, from vehicle suspensions to machinery components. A schematic of the system is shown in Figure 6.10.1.

To proceed with the derivation of the system’s equations of motion, we make the following assumptions:
for  and for
and for  . These coefficients quantify the resistance against the motion of each mass.
. These coefficients quantify the resistance against the motion of each mass.") and
and ") act on and , respectively, considered positive in the right direction.
act on and , respectively, considered positive in the right direction.We consider a general case where the system consists of two masses, 
Derive the system of differential equations for the forced damped coupled system described above (Figure 6.10.1).
The dynamics of this damped system with external forces are governed by two coupled second-order linear differential equations, reflecting the balance of forces on each mass. Here we consider the external forces’ direction to be to the right and displacements are also positive (to the right) assuming the displacement of mass 1, 


1) The forces acting on mass
, =-k_1x_1") , ,
, , =-k_2(x_2-x_1)") , where
, where  is the displacement of the middle spring.
is the displacement of the middle spring.=-c_1x_1'") , where is the damping coefficient for the damper 1. If present, the damping force is proportional to the velocity of the mass and acting in the opposite direction of motion.. It includes any external force acting on mass , which might be periodic or random, leading to forced vibrations.
, where is the damping coefficient for the damper 1. If present, the damping force is proportional to the velocity of the mass and acting in the opposite direction of motion.. It includes any external force acting on mass , which might be periodic or random, leading to forced vibrations.
According to Newton’s second law,
This equation simplifies to
Note that since 
2) The forces acting on mass
, =-k_3x_2") , ,
, , =k_2(x_2-x_1)") , where is the displacement of the middle spring.
, where is the displacement of the middle spring.=-c_2x_2'") , where is the damping coefficient for the damper 2. If present, the damping force is proportional to the velocity of the mass and acting in the opposite direction of motion.. It includes any external force acting on mass , which might be periodic or random, leading to forced vibrations.
, where is the damping coefficient for the damper 2. If present, the damping force is proportional to the velocity of the mass and acting in the opposite direction of motion.. It includes any external force acting on mass , which might be periodic or random, leading to forced vibrations.
According to Newton’s second law,
This equation simplifies to
Note that since 
Therefore, the time-dependent displacements of the masses are described by the system of differential equations
a) Rewrite the derived system of differential equations in Example 6.10.2 to a system of first-order differential equations. b) Write the system in matrix form.
a) The equations governing the mass-spring system in Figure 6.10.1 are derived in Example 6.10.2.
Section 6.4-C discussed how to convert higher-order differential equations as a system of first-order equations. We introduce new variables as follows:



The equations then can be written as
b) The system in the matrix form is
![bb(y)'(t)=[(0,1,0,0),(-(k_1+k_2)/(m_1),(c_1)/(m_1),(k_2)/(m_1),0),(0,0,0,1),((k_2)/(m_2),0,-(k_2+k_3)/(m_2) ,-(c_2)/(m_2))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%27%28t%29%3D%5B%280%2C1%2C0%2C0%29%2C%28-%28k_1%2Bk_2%29%2F%28m_1%29%2C%28c_1%29%2F%28m_1%29%2C%28k_2%29%2F%28m_1%29%2C0%29%2C%280%2C0%2C0%2C1%29%2C%28%28k_2%29%2F%28m_2%29%2C0%2C-%28k_2%2Bk_3%29%2F%28m_2%29%20%2C-%28c_2%29%2F%28m_2%29%29%5D&fg=000000&font=TeX&svg=1 "bb(y)'(t)=[(0,1,0,0),(-(k_1+k_2)/(m_1),(c_1)/(m_1),(k_2)/(m_1),0),(0,0,0,1),((k_2)/(m_2),0,-(k_2+k_3)/(m_2) ,-(c_2)/(m_2))]")
Consider a coupled mass-spring system, as described in Example 6.10.2, with the following parameters: both masses =0")
=0")
=1")
=0")
Given information:



 ,
, =1\ \"m\"") ,
, =x_2'(0)=0")
In Example 6.10.3, we converted a second-order system governing the coupled mass-spring system to a first-order system and expressed it in matrix notation.
where
Substituting the given values, the initial value problem becomes
![bb(y)'(t)=[(0,1,0,0),(-2,0,1,0),(0,0,0,1),(1,0,-2 ,0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%27%28t%29%3D%5B%280%2C1%2C0%2C0%29%2C%28-2%2C0%2C1%2C0%29%2C%280%2C0%2C0%2C1%29%2C%281%2C0%2C-2%20%2C0%29%5D&fg=000000&font=TeX&svg=1 "bb(y)'(t)=[(0,1,0,0),(-2,0,1,0),(0,0,0,1),(1,0,-2 ,0)]")
Using matrix algebra software, we find the eigenvalues and eigenvectors of the coefficient matrix. The eigenvalues and eigenvectors occur in the following complex conjugate pairs.
Eigenvector for =+-i")
Eigenvector for =+-sqrt(3)i")
The solution for each pair is given by Equation 6.7.1.
For the first pair, 
![bb"y"_1=[(0),(1),(0),(1)] cos(t)-[(-1),(0),(-1),(0)] sin( t)=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22_1%3D%5B%280%29%2C%281%29%2C%280%29%2C%281%29%5D%20cos%28t%29-%5B%28-1%29%2C%280%29%2C%28-1%29%2C%280%29%5D%20sin%28%20t%29%3D&fg=000000&font=TeX&svg=1 "bb\"y\"_1=[(0),(1),(0),(1)] cos(t)-[(-1),(0),(-1),(0)] sin( t)=")
![bb"y"_2=[(0),(1),(0),(1)] sin(t)+[(-1),(0),(-1),(0)]cos( t)=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22_2%3D%5B%280%29%2C%281%29%2C%280%29%2C%281%29%5D%20sin%28t%29%2B%5B%28-1%29%2C%280%29%2C%28-1%29%2C%280%29%5Dcos%28%20t%29%3D&fg=000000&font=TeX&svg=1 "bb\"y\"_2=[(0),(1),(0),(1)] sin(t)+[(-1),(0),(-1),(0)]cos( t)=")
For the second pair, i")
![bb"y"_3=[(0),(-3),(0),(3)] cos(sqrt(3) t)-[(sqrt(3)),(0),(-sqrt(3)),(0)] sin( sqrt(3) t)=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22_3%3D%5B%280%29%2C%28-3%29%2C%280%29%2C%283%29%5D%20cos%28sqrt%283%29%20t%29-%5B%28sqrt%283%29%29%2C%280%29%2C%28-sqrt%283%29%29%2C%280%29%5D%20sin%28%20sqrt%283%29%20t%29%3D&fg=000000&font=TeX&svg=1 "bb\"y\"_3=[(0),(-3),(0),(3)] cos(sqrt(3) t)-[(sqrt(3)),(0),(-sqrt(3)),(0)] sin( sqrt(3) t)=")
![bb"y"_4=[(0),(-3),(0),(3)] sin(sqrt(3) t)+[(sqrt(3)),(0),(-sqrt(3)),(0)] cos( sqrt(3) t)=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22_4%3D%5B%280%29%2C%28-3%29%2C%280%29%2C%283%29%5D%20sin%28sqrt%283%29%20t%29%2B%5B%28sqrt%283%29%29%2C%280%29%2C%28-sqrt%283%29%29%2C%280%29%5D%20cos%28%20sqrt%283%29%20t%29%3D&fg=000000&font=TeX&svg=1 "bb\"y\"_4=[(0),(-3),(0),(3)] sin(sqrt(3) t)+[(sqrt(3)),(0),(-sqrt(3)),(0)] cos( sqrt(3) t)=")
Thus, the fundamental matrix of the system is
=")
The general solution to the system in matrix form is
![bb(y)(t)= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%28t%29%3D%20%5B%28sin%28t%29%2C-cos%28t%29%2C-sqrt%283%29%20sin%28sqrt%283%29%20t%29%2Csqrt%283%29%20cos%28sqrt%283%29%20t%29%29%2C%28cos%28t%29%2Csin%28t%29%2C-3%20cos%28sqrt%283%29%20t%29%2C-3sin%28sqrt%283%29%20t%29%29%2C%28sin%28t%29%2C-cos%28t%29%2Csqrt%283%29%20sin%28sqrt%283%29%20t%29%2C-sqrt%283%29%20cos%28sqrt%283%29%20t%29%29%2C%28cos%28t%29%2Csin%28t%29%2C3%20cos%28sqrt%283%29%20t%29%2C3%20sin%28sqrt%283%29%20t%29%29%5D&fg=000000&font=TeX&svg=1 "bb(y)(t)= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]")
Applying the initial conditions, we obtain
![[(0,-1,0,sqrt(3)),(1,0,-3,0),(0,-1,0,-sqrt(3)),(1,0,3 ,0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%280%2C-1%2C0%2Csqrt%283%29%29%2C%281%2C0%2C-3%2C0%29%2C%280%2C-1%2C0%2C-sqrt%283%29%29%2C%281%2C0%2C3%20%2C0%29%5D&fg=000000&font=TeX&svg=1 "[(0,-1,0,sqrt(3)),(1,0,-3,0),(0,-1,0,-sqrt(3)),(1,0,3 ,0)]")
![[(c_1),(c_2),(c_3),(c_4)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28c_1%29%2C%28c_2%29%2C%28c_3%29%2C%28c_4%29%5D&fg=000000&font=TeX&svg=1 "[(c_1),(c_2),(c_3),(c_4)]")
Solving for the coefficients, we find
Therefore, the solution to the initial value problem is
This can be written as
![bb(y)=[(y_1),(y_2),(y_3),(y_4)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%3D%5B%28y_1%29%2C%28y_2%29%2C%28y_3%29%2C%28y_4%29%5D&fg=000000&font=TeX&svg=1 "bb(y)=[(y_1),(y_2),(y_3),(y_4)]")

Recall from Example 10.6.3 that we introduced variables _n")
Given this conversion, the displacements of mass 1 (
The below visualization displays the displacements of the two masses over time in a coupled mass-spring system in this example, plotted on a graph with time on the horizontal axis (ranging from 0 to 10 seconds) and displacement in meters on the vertical axis. The line for Mass 1 oscillates, indicating a pattern of motion that varies between positive and negative displacements, suggesting complex harmonic motion. The line for Mass 2 follows a similar oscillatory pattern, but with phase and amplitude differences compared to Mass 1, reflecting the interaction between the two masses through the spring system.
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=870
and are 1 kg, and all spring constants , , and are 1 N/m. The system is isolated from external forces and damping effects. Initially, the displacements and velocities are given as m, =2") m/s,
m/s, =0") m, and m/s. Solve the initial value problem to determine the displacements of the masses as functions of time. Use matrix algebra software to find the eigenvalues and eigenvectors.
m, and m/s. Solve the initial value problem to determine the displacements of the masses as functions of time. Use matrix algebra software to find the eigenvalues and eigenvectors.
VII
This chapter provides a brief overview of partial differential equations, which involve partial derivatives of a function with respect to multiple independent variables.
7.1 Introduction: This section outlines boundary and initial conditions, essential for solving initial boundary value problems in PDEs.
7.2 Fourier Series: This section reviews the Fourier Series, a crucial tool for expressing the solution of partial differential equations.
7.3 Heat Equation: This section discusses using the method of Separation of Variables for solving the heat equation, which describes how heat diffuses through a medium over time.
7.4 Wave Equation: This section briefly discusses the solution to the wave equation, which models the propagation of waves, such as sound and light waves, through a medium

Maryam Mirzakhani, born in 1977 in Tehran, Iran, was a trailblazing mathematician whose profound contributions to geometry and dynamical systems reshaped our understanding of these fields. Her mathematical journey, which began with outstanding successes in the International Mathematical Olympiads, culminated in her earning the prestigious Fields Medal in 2014, making her the first woman to receive this honor. Mirzakhani’s groundbreaking work at Harvard University under Curtis McMullen focused on the intricate geometry of Riemann surfaces and their moduli spaces, encompassing areas like hyperbolic geometry and Teichmüller theory. Renowned for her deep, creative thinking and ability to draw connections between different mathematical areas, Mirzakhani not only solved long-standing problems but also inspired a generation, particularly women and girls in STEM, through her remarkable intellect and perseverance. Her legacy as a symbol of intellectual curiosity and boundary-breaking achievement makes her an exemplary figure for illustrating the far-reaching impact and significance of mathematical concepts.
Unlike Ordinary Differential Equations (ODEs), which involve derivatives with respect to a single variable, PDEs involve partial derivatives of a function with respect to multiple independent variables. Essentially, a PDE is an equation that relates the partial derivatives of a function of multiple variables.
PDEs are fundamental in modeling and understanding complex systems in the natural world, for example, in physics, for describing wave mechanics, electromagnetic fields, and heat transfer. For example, Maxwell’s equations, which are fundamental to electromagnetic theory, are expressed as PDEs or in engineering, in analyzing stress and strain within materials, fluid dynamics, and thermodynamics.
In the context of differential equations, particularly relevant for engineering students, understanding Boundary Value Problems (BVPs) and Initial Value Problems (IVPs) is crucial.
A Boundary Value Problem involves solving a differential equation subject to a set of constraints called boundary conditions. These conditions specify the behavior of the solution at the boundaries of the domain over which the equation is defined. In the case of Partial Differential Equations (PDEs), these domains are often spatial, and the boundaries can be physical or geometric limits.
An Initial Value Problem, in contrast, involves solving a differential equation given the value of the solution at a specific point, often the start of the time domain. For ODEs and time-dependent PDEs, these initial conditions specify the state of the system at the beginning of the observed period.
Boundary Conditions: These are constraints specified at the boundaries of the spatial domain of a PDE. They can be of various types:
Initial Conditions: These specify the state of the system at the beginning of the observation period, often time
To solve partial differential equations we often use a method that transforms complex partial differential equations into simpler ordinary differential equations. A key step in this method involves expressing functions as trigonometric Fourier series. Therefore, this section provides a brief overview of the Fourier Series, which will enable us to effectively tackle the solution of partial differential equations in subsequent sections.
A Fourier series is an expansion of a function
The formula for a Fourier series of a function 
Here, 
 cos(frac{npi x}{L}) dx")
 sin(frac{npi x}{L}) dx")
In certain cases, the function
Sine Series: If  = -f(x)")
Cosine Series: If  = f(x)")
Fourier series are integral in solving PDEs, especially when using the method of Separation of Variables. This method often requires satisfying boundary conditions, and the Fourier series provides a way to do this. By expressing a function as a Fourier series, PDEs can be transformed into simpler ODEs, each associated with a different frequency component of the original function.
Find the Fourier Series of =x")
![[-2,2]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B-2%2C2%5D&fg=000000&font=TeX&svg=1 "[-2,2]")
The endpoint
where
 dx,")
 dx,")
We evaluate
Given =(-1)^n")
Therefore the Fourier series is
The below figure shows the graph of 


The below interactive figure presents a visual comparison between a mathematical function’s Fourier series approximation and the linear function ![[−2,2]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%E2%88%922%2C2%5D&fg=000000&font=TeX&svg=1 "[−2,2]")
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=281
Find the Fourier Series of =x^2")
The endpoint
where
 dx,")
 dx,")

To evaluate
Given
Therefore, the Fourier series is
The below figure shows the graph of

The below interactive figure presents a visual comparison between a mathematical function’s Fourier series approximation and the quadratic function
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=281
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=281
over the given interval.
=4 x")
over the given interval.
=1-x^2")
In this section, we explore the method of Separation of Variables for solving partial differential equations commonly encountered in mathematical physics, such as the heat and wave equations. This method simplifies complex partial differential equations into more manageable ordinary differential equations. While computer-based algorithms like finite differences and finite elements are frequently used for solving partial differential equations, their accuracy can be challenging to gauge. Therefore, the analytical Separation of Variables method is important for verifying these computational methods’ results.
The heat equation describes how heat diffuses through a medium over time. It is formulated considering a small volume element within the material, where the rate of thermal energy change is equal to the net heat flow. Representing the temperature at point ")

 represents the rate of change of temperature with time,
represents the rate of change of temperature with time,  (where is the thermal diffusivity of the material) is a constant that combines the material’s thermal conductivity, density, and specific heat capacity, and
(where is the thermal diffusivity of the material) is a constant that combines the material’s thermal conductivity, density, and specific heat capacity, and  (the Laplacian of ) represents the divergence of the temperature gradient, indicating how the temperature changes in space around any point. In one dimension, like a simple rod, the Laplacian of simplifies to
(the Laplacian of ) represents the divergence of the temperature gradient, indicating how the temperature changes in space around any point. In one dimension, like a simple rod, the Laplacian of simplifies to /(delx^2)") . Therefore, the heat equation becomes
. Therefore, the heat equation becomes
Solving this equation requires setting boundary and initial conditions. The initial condition specifies the temperature distribution throughout the domain at the initial time, usually at =f(x)")
Consider a uniform rod of length
For zero temperature at both ends of the rod, the boundary conditions are:
The initial temperature distribution along the rod is given by:
Using the method of Separation of Variables, we assume that the solution can be written as the product of two functions, one depending only on
Substituting the solution form into the Heat Equation gives
Dividing the equation by T(t)")
This equation is separated into two ordinary differential equations (ODEs) because the left side depends only on 
As a result, we arrive at two distinct ODEs.
To solve the spatial part of the ordinary differential equation (ODE), we start by rearranging the equation
=0")
=r^2+lambda") . Depending on the sign of , there are three cases to consider.
. Depending on the sign of , there are three cases to consider.
Case 1: 
In this case, the roots of ")
Applying the first boundary conditions  = 0")

 = 0")
)=0")
)=0")
=npi")
Therefore, the positive eigenvalues and their associated eigenfunctions of this boundary value problem are determined to be
^2 quad text{and} quad X_n(x) = sinleft( frac{npi x}{L} right)")
Case 2: 
In this case, the solution to the differential equation is
Applying the first boundary conditions 
Case 3: 
In this case, the roots of
Upon applying the first boundary conditions 
)+c_2e^(Lsqrt(lambda)) =0")
As we seek a nontrivial solution, the term in parentheses must be zero.
However, this equation holds only if
Therefore, the only valid eigenvalues and eigenfunctions for the spatial part of the equation are realized when
and substituting the previously determined eigenvalues ^2")
For each eigenvalue 
 = ce^{-beta^2 left( frac{npi}{L} right)^2 t}")
Here ")
To construct the general solution for the heat equation, we combine the spatial and temporal solutions into a composite series.
Given the solutions  = sinleft( frac{npi x}{L} right)")
 =B_n sinleft( frac{npi x}{L} right) e^{-beta^2 left( frac{npi}{L} right)^2 t}")
In series notation, this becomes
Here, the constant 
 = f(x)")
This is the Fourier sine series representation of ![[0,L]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B0%2CL%5D&fg=000000&font=TeX&svg=1 "[0,L]")
Find the solution to the initial boundary value heat flow problem
/(delt)(x,t)=5(del^2u)/(delx^2)(x,t) \ ,")

=u(pi,t)=0\ ,")

=6sin(x)+7sin(5x)")
Comparing the given partial differential equation to Equation 7.3.1, we see 

")
 e^0=")
=")
From the argument of sine functions, the two terms correspond to 


Therefore, the solution to the heat flow problem is
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=283
Find the solution to the initial boundary value heat flow problem
/(delt)(x,t)=9(del^2u)/(delx^2)(x,t) \ ,")

=u(4,t)=0\ ,")
=x")
Comparing the equation with Equation 7.3.1, we see that 
By integration by parts, we have
Thus the solution is
The figure below shows the partial sum of the solution
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=283
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=283
Neumann Boundary Conditions specify the value of the derivative (gradient) of the temperature at the boundary, often representing insulated or adiabatic surfaces where no heat flow occurs. For instance, /(delx)(0,t)=0")
To develop a solution for the heat equation with Neumann Boundary Conditions, we use the method of Separation of Variables.
Consider a uniform rod of length
For insulated ends, the derivative (gradient) of the temperature at the boundary is zero. Thus the boundary conditions are:
The initial temperature distribution along the rod is given by
The solution to this boundary value problem is
where
is the Fourier cosine series of 

Find the solution to the initial boundary value heat flow problem
/(delt)(x,t)=4(del^2u)/(delx^2)(x,t) \ ,")

=u_x(2,t)=0\ ,")
=5x^2,")
Comparing the equation with Equation 7.3.1, we see that 

=5x^2")
Applying 7.3.6 to find
By integration by parts, we have
Given
The general solution is then given by 7.3.4
The figure below shows the partial sum of the solution
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=283
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=283
/(del t)=5 (del^2u)/(del x^2),")
=u(3,t)=0,")
=6,")
/(delt)(x,t)=2(del^2u)/(delx^2)(x,t) \ ,")
=-2sin(4x)-7sin(5x),")
/(delt)(x,t) =6 (del^2u)/(delx^2)(x,t) ,")
= u_x(3,t)=0,")
=5 x^2,")
The wave equation models the propagation of waves, such as sound waves, light waves, or water waves, through a medium. It captures how these waves travel and change over time and space. The wave equation for the initial boundary value problem for the displacement (deflection) of a vibrating string whose endpoints are held fixed is
=u(L,t)=0\ ,")
=f(x)\ ,")
/(delt)(x,0)=g(x)\ ,")
Using the method of Separation of Variables, we can find the formal solution to this initial boundary value problem:
where
=sum_(n=1)^ooA_n sin((npix)/L)")
are the Fourier sine series of
sin((npix)/L) dx")
Find the solution to the vibrating string problem
/(delt^2)(x,t)=4(del^2u)/(delx^2)(x,t) \ ,")

=sin(3x)-1/2sin(5x) ,")
/(delt)(x,0)=sin(4x)+2sin(6x)\ ,")
Comparing the equation with Equation 7.4.1, we see that =sin(3x)-1/2sin(5x)")
=sin(4x)+2sin(6x)")
")
Substituting
=")
^oo (A_n cos(0)+B_n/(2n)sin(0) )sin(nx)")
From initial boundary values, we have
Thus
^oo A_nsin(nx)")
Equating the coefficients of like terms, we see that

with the remaining coefficients being zero. Similarly, by partially differentiating Equation 7.4.2 with respect to
/(delt)(x,t)")
/(delt)(x,0)")
^oo (-2nA_n sin(0) +B_ncos(0) )sin(nx)")
From initial boundary values, we have
Thus
^oo B_nsin(nx)")
Equating the coefficients of like terms, we see that

with the remaining coefficients being zero.
The solution to the problem is
=cos(6t)sin(3x)+1/8sin(8t)sin(4x)")
The figure below shows the sketch of
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=285
One or more interactive elements has been excluded from this version of the text. You can view them online here: https://ecampusontario.pressbooks.pub/diffeq/?p=285
/(delt^2)(x,t) =9 (del^2u)/(delx^2)(x,t) ,")
= u(pi,t)=0,")
=-sin(x)+3sin(7x),")
/(delt)(x,0)=-2sin(4x)+sin(10x)")
/(delt^2)(x,t) =4 (del^2u)/(delx^2)(x,t) ,")
=-sin(x)+3sin(3x),")
/(delt)(x,0)=-4sin(2x)+3sin(6x)")
=-cos(2t)sin(x)-sin(4t)sin(2x)+")
1
Use the following simulation to learn more about how sines and cosines add up to produce arbitrary periodic functions.
Use the following mass-spring system simulation to study the relationship between the velocity and acceleration vectors, and their relationship to motion, at various points in the oscillation with and without damping and learn more about the factors that affect the period of oscillation.
2
Hayt, W. H., Jr., Kemmerly, J. E., & Durbin, S. M. (2007). Engineering circuit analysis (7th ed.). McGraw-Hill Higher Education.
Meriam, J. L., Kraige, L. G., & Bolton, J. N. (2020). Engineering mechanics: Dynamics (8th ed.). John Wiley & Sons.
Nagle, R. K., Saff, E. B., & Snider, A. D. (2018). Fundamentals of differential equations (9th ed.). Pearson.
Rao, S. S. (2017). Mechanical vibrations (6th ed.). Pearson.
Trench, W. F. (2013). Elementary differential equations with boundary value problems. https://math.libretexts.org/Bookshelves/Differential_Equations/Elementary_Differential_Equations_with_Boundary_Value_Problems_(Trench)
 ,
, (dy)/dx+a_0(x)y=f(x)")
")
 (dy)/dx+a_0(x)y=0")
+2+4sin(2x)+4x^2")






dy=g(x)dx")
dx")
dx")

/2+12x+3C_1)^(1//3)")
/2+12x+C_2)^(1//3)")
dy = 6tan^2(2x)dx")
 dy= int 6 tan^2(2 x) dx")
-6x+C_1")
")
=4.")
/(dx)=2x(7y-1)")
=2xdx")
 =int2xdx")

")
+1)")
=4")


+1)")
=1/35.")
\ dy=5/(sqrt(x))\ dx")
 \ dx")
+C")
+C)")
=1/35")
+C) =1/35")
 =1/35")


-55)")
uu(30.25,oo)")
=sin(4/3sin(3x)+C)")
 e^(4y)")
=-1/4lnabs(-16/5 e^(5x)+C)")
=(5 e^(2x^2)+1)/2")
=-1/(6 sqrt(x) -54)")
uu(81,oo)")
 y = q(x)")

(vy_1)=q(x)")
y_1)=q(x)")
y_1=0")
")
![y(x)=y_1(x)[int(q(x))/(y_1(x))dx+C]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=y%28x%29%3Dy_1%28x%29%5Bint%28q%28x%29%29%2F%28y_1%28x%29%29dx%2BC%5D&fg=000000&font=TeX&svg=1 "y(x)=y_1(x)[int(q(x))/(y_1(x))dx+C]")
")
)")
![[int u(x)q(x)dx+C]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5Bint%20u%28x%29q%28x%29dx%2BC%5D&fg=000000&font=TeX&svg=1 "[int u(x)q(x)dx+C]")
y=0")
/y=-p(x)")
=-intp(x) dx")
dx)")
=e^(intp(x)dx)")
 y = q(x)")
=e^(int p(x) dx)")
![y(x)=1/(u(x))[int u(x)q(x)dx+C]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=y%28x%29%3D1%2F%28u%28x%29%29%5Bint%20u%28x%29q%28x%29dx%2BC%5D&fg=000000&font=TeX&svg=1 "y(x)=1/(u(x))[int u(x)q(x)dx+C]")

=x^2cosx")
=e^(int p(x)dx)=e^(int -2/x dx)=e^(-2ln|x|)=x^-2")
int x^-2. x^2 cosx dx")

")

*y=4x^2+4x")
=e^(int p(x)dx)=e^(int -1/(x+1) dx)=e^(-ln|x+1|)=(x+1)^-1")
^-1)int (x+1)^-1. 4x(x+1)dx")
int4x dx")
(2x^2 +C)")
= (x+1)(2x^2 -5)")
=x^5e^(7x)")
=1/2 e^(4x)+Ce^(2x)")
=1/2t^6+C t^(4)")
=1/x^2(1+2x^4)")
=(2t^2+3/2)(t+1)")
dx+(3x^2 y^2+3xy^2+3x)dy=0")


)_(F_x)dx+underbrace((3x^2 y^2+3xy^2+3x))_(F_y)dy=0")
")

dx+N(x,y)dy=0")
/(dely) (x,y)=(delN)/(delx) (x,y)")
=int M(x,y)dx+g(y)")
=C")

/(dely) (x,y)=9y^2")
/(delx) (x,y) = 9y^2")
=int3y^3dx+g(y)")
")
")

=2")
/(dely) (x,y)=9y^2e^x")
/(delx) (x,y) = 9y^2e^x")
/(dely) = N")
=int9y^2(e^x-3) dy+h(x)")
 + h(x)")
")
")
e^x")
=-e^x")
= 3y^3(e^x-3) -e^x")
 -e^x = C")
(e^0-3) -e^0 = C")
-1=C")

 -e^x = -49")
 = e^x-49")
/(3(e^x-3))")
((e^x-49)/(3(e^x-3)) )")

")
)uu(ln(3),oo)")

+3y^2ln(x)+2/3y^3=C")
/(2 e^x+6))^(1/3)")
M(x, y)dx + mu(x, y)N(x, y)dy = 0")
dx+(x^2y-x)dy=0")
/N=(1-(2xy-1))/(x^2y-x)=(2(1-xy))/(-x(1-xy))=-2/x")

")
)dx+(y-x^(-1))dy=0")
+(y^2)/2=C")
=e^x")
dx+(x^2y-x)dy = 0")


dx+x(sin(y)-ycos(y))dy = 0")
=y/(sin(y)")
/(sin(y))=C")
/(dt)=rP")
=P_0e^(rt)")
=200")
=400")
=400")
=2")
/10")
/(dt)-ln(2)/10 P=-18")
=e^(-int(ln(2))/10 dt)=e^(-(ln(2))/10 t)")
![P(t)=e^((ln(2))/10 t) [int -18 e^(-(ln(2))/10 t) dt+C]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=P%28t%29%3De%5E%28%28ln%282%29%29%2F10%20t%29%20%5Bint%20-18%20e%5E%28-%28ln%282%29%29%2F10%20t%29%20dt%2BC%5D&fg=000000&font=TeX&svg=1 "P(t)=e^((ln(2))/10 t) [int -18 e^(-(ln(2))/10 t) dt+C]")
![P(t)=e^((ln(2))/10 t) [18(10/(ln(2)) )e^(-(ln(2))/10 t) +C]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=P%28t%29%3De%5E%28%28ln%282%29%29%2F10%20t%29%20%5B18%2810%2F%28ln%282%29%29%20%29e%5E%28-%28ln%282%29%29%2F10%20t%29%20%2BC%5D&fg=000000&font=TeX&svg=1 "P(t)=e^((ln(2))/10 t) [18(10/(ln(2)) )e^(-(ln(2))/10 t) +C]")
=180/(ln(2)) +Ce^((ln(2))/10 t)")
) +Ce^0=200")

=180/(ln(2)) -59.6851 e^((ln(2))/10 t)")
) -59.6851 e^((ln(2))/10 t)")
/(dt)=R_(\"inflow\")-R_(\"outflow\")")
 = (0.1 \"kg/L\")(8 \"L/min\")")


)/2000 \ \"kg/L\")*(8 \ \"L/min\")")
)/250")
=200(1-e^(-t/250))")
=(Q(t))/V \ \"kg/L\"")
=200/2000(1-e^(-t/250))")
)")
=0.04")
)=0.04")
=1.4")
")

/(dt)=-k(T-T_s)")
/(dt)=-k(T-T_s), \ \ T(0)=T_0")
 = T_s +(T_0-T_s)e^(-kt)")
 = 25 +(75-25)e^(-0.07t)")
 = 25 +(75-25)e^(-0.07(10))")

e^(-0.07t)=35")
=1/5")
/0.07")

/(dt)=F_g")
/(dt)=-g")






=-29")
=1/2(Ce^(-2/5t)-49)")
=1/2(-9e^(-2/5t)-49)")
")
/dt+RI=E(t)")
/dt+R/L I=(E(t))/L")
=e^(int R/L dt)=e^(Rt//L)")
![I(t)=e^(-Rt//L)[int e^(Rt//L) \ (E(t))/L dt +C]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=I%28t%29%3De%5E%28-Rt%2F%2FL%29%5Bint%20e%5E%28Rt%2F%2FL%29%20%5C%20%28E%28t%29%29%2FL%20dt%20%2BC%5D&fg=000000&font=TeX&svg=1 "I(t)=e^(-Rt//L)[int e^(Rt//L) \ (E(t))/L dt +C]")
/dt+3I=sin(10t)")
=e^(int 3/0.01 dt)=e^300t")
![I(t)=e^(-300t)[100int e^(300t) \ sin(10t) dt +C]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=I%28t%29%3De%5E%28-300t%29%5B100int%20e%5E%28300t%29%20%5C%20sin%2810t%29%20dt%20%2BC%5D&fg=000000&font=TeX&svg=1 "I(t)=e^(-300t)[100int e^(300t) \ sin(10t) dt +C]")
![I(t)=e^(-300t)[-10/901e^(300t)cos(10t)+300/901e^(300t)sin(10t)+C]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=I%28t%29%3De%5E%28-300t%29%5B-10%2F901e%5E%28300t%29cos%2810t%29%2B300%2F901e%5E%28300t%29sin%2810t%29%2BC%5D&fg=000000&font=TeX&svg=1 "I(t)=e^(-300t)[-10/901e^(300t)cos(10t)+300/901e^(300t)sin(10t)+C]")
=-10/901cos(10t)+300/901sin(10t)+Ce^(-300t)")
+300/901sin(0)+Ce^(0) =0")


=-10/901cos(10t)+300/901sin(10t)+10/901e^(-300t)")
")
/(dt)=100/901sin(10t)+3000/901cos(10t)-3000/901e^(-300t)")
/dt")
![V_L(t)=0.01[100/901sin(10t)+3000/901cos(10t)-3000/901e^(-300t) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=V_L%28t%29%3D0.01%5B100%2F901sin%2810t%29%2B3000%2F901cos%2810t%29-3000%2F901e%5E%28-300t%29%20%5D&fg=000000&font=TeX&svg=1 "V_L(t)=0.01[100/901sin(10t)+3000/901cos(10t)-3000/901e^(-300t) ]")
=1/901sin(10t)+30/901cos(10t)-30/901e^(-300t)")
")

![V_R(t)=3[-10/901cos(10t)+300/901sin(10t)+10/901e^(-300t) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=V_R%28t%29%3D3%5B-10%2F901cos%2810t%29%2B300%2F901sin%2810t%29%2B10%2F901e%5E%28-300t%29%20%5D&fg=000000&font=TeX&svg=1 "V_R(t)=3[-10/901cos(10t)+300/901sin(10t)+10/901e^(-300t) ]")
=-30/901cos(10t)+900/901sin(10t)+30/901e^(-300t)")
=2.2-11/2400Q(t)")
=480 -469 e^(-11/2400 t)")

=1/(7)(e^(4t)-e^(-3t))")
y' + q(x)y = f(x)")
y' + q(x)y = 0")
,y_2(x_0)),(y_1'(x_0),y_2'(x_0))|=")
y'_2(x_0)-y'_1(x_0)y_2(x_0)")
 = W(x_0)e^{\int_{x_0}^x p(t) dt}")
")
")
 = |(y_1,y_2),(y_1',y_2')|")
= |(e^(6t),e^(5t) ),(6e^(6t),5e^(5t) ) |")
+c_2e^(5t)")
=-5")
+c_2e^(0)=-5")

+5c_2e^(5t)")
 = -32")
+5c_2e^(0)=-32")

,(6c_1+5c_2=-32 ):}")

+2e^(5t)")
=3e^t")
=5 e^(-t)-3 e^(2t)")
=-4e^(-10t)")
=-4 e^(-5t)sin(4t)-5 e^(-5t)cos(4t)")

(ar^2+br+c)=0")

 + c_2 e^(r_2 x)")
 + c_2 xe^(r x)")
(c_1cos(betax)+c_2sin (betax))")


(r-2)=0")
=c_1e^(-3x)+c_2e^(2x)")
 = 9, \quad y'(0) = 35")

(r-3)=0")
=c_1e^(5x)+c_2e^(3x)")
=9")
+c_2e^(0)=9")

+3c_2e^(3x)")
 = 35")
+3c_2e^(0)=35")

,(5c_1+3c_2=35 ):}")

=4e^(5x)+5e^(3x)")


^2=0")
=c_1e^(4x)+c_2xe^(4x)")
 = 4, \quad y'(0) = -25")
^2=0")
=c_1e^(-5x)+c_2xe^(-5x)")
+c_2(0)e^(0)=4")
+c_2(e^(-5x)-5xe^(-5x))")
 = -25")
+c_2(e^(0)-0)=-25")

=4e^(-5x)-5xe^(-5x)")


)/2=2+-3i")
=e^(2x)(c_1 cos(3x)+c_2 sin(3x))")
 = -3, \quad y'(0) = -7")



^2=-25")


=e^(-x)(c_1 cos(5x)+c_2 sin(5x))")
(c_1 cos(0)+c_2 sin(0))=-3")
(-5c_1 sin(5x)+5c_2 cos(5x))")
 = -7")

=e^(-x)(-3 cos(5x)-2 sin(5x))")
 = 4, \quad y'(0) = -8.5")
=e^(-4x)+3 e^(-1.5x)")
 = -1, \quad y'(0) = 8")
=-e^(-2x)+6xe^(-2x)")
 = 4, \quad y'(0) = -18")
=e^(-5x)(4cos(x)+2sin(x))")
y'+q(x)y=f(x)")
y'+q(x)y=0")

yprime+q(x)y=f_1(x)")
yprime+q(x)y=f_2(x)")
yprime+q(x)y=k_1f_1(x)+k_2f_2(x)")
=4y_(p1)-2y_(p2)")
/2-9/4)-2(e^(3x)/2)")
")
+10x")
+5/4x-15/16")
+4sin(2x)")
-1/5sin(2x)+1/10cos(2x)")
")
")
 - 20Ae^(-2x) +25Ae^(-2x) = 3e^(-2 x)")
e^(-2x)=3e^(-2x)")
=3e^(-2x)")


")
+c_1e^(-5x)+c_2xe^(-5x)")
(2x-5x^2)+Ae^(-5x)(2-10x)")
(25x^2-20x+2)")
=e^(-5x)")
(25x^2-20x+2+20x-50x^2+25x^2)=e^(-5x)")
(2)=e^(-5x)")


")
+c_1e^(-5x)+c_2xe^(-5x)")
=2")
-5/2x^2e^(-5x)-5c_1e^(-5x)+c_2(e^(-5x)-5xe^(-5x))")
=-3")
=-3")

+2e^(-5x)+7xe^(-5x)")
")
")
e^(2x)")
+Bsin(4x)")
cos(pix)+(B_2x^2+B_1x+B_0)sin(pix)")
((A_1x+A_0)cos(8x)+(B_1x+B_0)sin(8x))")
")
(A_2x^2+A_1x+A_0)")
")
/(dt^2) + 2(dy)/(dt) + 17y = 5e^(-4 t)")
=c_1e^(- t)cos(4t)+c_2 e^(- t)sin(4t)+ 1/5e^(-4t)")
-1/75cos(10x)")
,\ \ y(0) = 1,\ y'(0) = -17")
=3 e^(-2x)-2 e^(5x)-xe^(-2x)")
 = 4,\ y'(0) = 1")
=-3e^(-3t)-3e^(2t)-2t+10")
")




 = f(x)")
,(u_1'y_1'+ u_2'y_2' = (f(x))/a ):}")
 y_1)/(a(y_1 y_2' - y_1' y_2))")
 y_1)/(a W(y_1,y_2))")
 y_1)/(a W(y_1,y_2)) dx")
arctan(x)")

^2=0")
 = |(y_1,y_2),(y_1',y_2')|")
= |(e^(-3x),xe^(-3x) ),(-3e^(-3x),e^(-3x)(1-3x )) |")
(1-3x)+3xe^(-6x)")
")
arctan(x) (xe^(-3x)))/(e^(-6x)) dx")
 dx")
+1/2int(x^2)/(1+x^2)dx")
 +1/2(x-arctan(x))+C")
arctan(x) (e^(-3x)))/(e^(-6x)) dx")
 dx")
-intx/(1+x^2)dx")
 -1/2ln(1+x^2)+C")
 -1/2ln(1+x^2))xe^(-3x)")
(x^2arctan(x)+x-arctan(x)-xln(1+x^2))")
")

(r+2)=0")
+C")
-e^x+C")
e^(-x)+(ln(1+e^x)-e^x )e^(-2x)")
+e^(-2x))ln(1+e^x)-e^(-x)")
=c_1y_1+c_2y_2+y_p")
+e^(-2x))ln(1+e^x)-e^(-x)")
+e^(-2x))ln(1+e^x)")
y''+a_1(x)y'+a_0(x)y=g(x)")
=Y_0, \ y'(x_o)=Y_1")
 y_1)/(W(y_1,y_2)) dx")
")
= |(x^2,x^-1 ),(2x,-x^-2) |")

 y_2)/( W(y_1,y_2)) dx")
 x^-1)/-3 dx")
 dx")
+C")

 x^2)/-3 dx")
 dx")
+C")

x^2+(-1/6x^2-1/4x^4 )x^-1")

lnx")
=2x^2 e^(4x)ln(x)-3x^2 e^(4x)")
")
=cos(x)ln|cos(x)|+xsin(x)")
")
=-3/2x-1/5x^4")
u'' + q_1(x)u' = f(x)")
=e^(-int p(x)dx)")
)/((y_1)^2) \ dx")
=c_1y_1+c_2y_2")
y'+(4x+8)y = 0, \quad x gt 0")
/xy'+(4x+8)/xy = 0")
)/((y_1)^2) dx")
 int (x^4e^(4x))/((e^(2x))^2) dx")
 int x^4 dx")
+C")
=2,\ y'(1)=-3")

/(x^2) dx")

^0")

")

")
= |(x,x^-1 ),(1,-x^-2) |")

 x^-1)/(-2x^-1) dx")
dx")
dx")
")
 x)/(-2x^-1) dx")
dx")
")
 x-1/2(x^3/3+x) x^-1")

=1/3x^2-1+c_1x+c_2x^-1")
-1+c_1(1)+c_2(1^-1)=2")


=2/3x+c_1-c_2x^-2")
=-3")
+c_1-c_2(1^-2) =-3")

,(c_1-c_2=-11/3 ):}")

=1/3x^2-1-1/2x+19/6x^-1")
y'+(16x+4)y = 0, \quad x gt 0")
")

+c_1x+c_2/x")
 = 3 , \ y'(-1) = -3")
)")
")
+br+c)=0")
r+c=0")
 + c_2 x^(r_2)")


(c_1cos(beta lnx) +c_2sin (betalnx))")
=-4,\ y'(1)=-1")

=c_1 x^4 + c_2x^4lnx")
=-4")

=-1")

=-4x^4+15x^4lnx")

=c_1x^4+c_2x")
=1,\ y'(1)=2")
=9/2x^-5-7/2x^-7")

")
-cy'+F(t)")
")



")
")
=c_1cos(omega_0t)+c_2sin(omega_0t)")
=Rcos(omega_0t-phi)")
,")

=392,000\ \"dyne/cm\"")
 =sqrt(196)=14")
=20")
=c_1cos(14t)+c_2sin(14t)")
=-3")
+c_2sin(0)=-3")
=-14c_1sin(14t)+14c_2cos(14t)")
+14c_2cos(0)=20")


=-3cos(14t)+10/7sin(14t)")

/(omega_0)=pi/7 \ \"s\"")
^2+(10/7)^2)=1/7sqrt(541)")
")
/-3|)~~0.444 \ \"rad\"")
 = 1/7sqrt(541) cos(14 t - 2.697)")

=c_1e^(-c/(2m)t)+c_2te^(-c/(2m)t)")

")
=2sqrt(mk)")
=c_1e^(r_1t)+c_2e^(r_2t)")
=-c/(2m)+-(sqrt(4mk-c^2))/(2m)i=-c/(2m)+-omega_1i")
=e^(-c/(2m)t)(c_1cos(omega_1t)+c_2sin(omega_1t))")
=Re^(-c/(2m)t)cos(omega_1t-phi)")
=(c_2)/R")
=2")
=2sqrt(1(64))=16")
=c_1e^(-8t)+c_2te^(-8)")
=0.2")
+0=0.2")

=-8c_1e^(-8t)+c_2e^(-8t)(1-8t)")
+c_2e^0(1)=2")
+c_2=2")

=0.2e^(-8t)+3.6te^(-8t)")
=(-34+-sqrt(34^2-4(1)(64)))/(2(1))")

=c_1e^(-2t)+c_2e^(-32t)")
+c_2e^0=0.2")

=-2c_1e^(-2t)-32c_2e^(-32t)")
-32c_2e^0=2")


=0.28e^(-2t)-0.08e^(-32t)")
=-4/(2(1))+-(sqrt(4(1)(64)-4^2))/(2(1))i=-2+-2sqrt(15)i")
=e^(-2t)(c_1cos(2sqrt(15)t)+c_2sin(2sqrt(15)t))")
(c_1cos(0)+c_2sin(0))=0.2")
 c_1sin(2sqrt(15)t)+2sqrt(15) c_2cos(2sqrt(15)t))")
c_2=2")
+2sqrt(15)c_2=2")
)/25")
=e^(-2t)(0.2cos(2sqrt(15)t)+(2sqrt(15))/25 sin(2sqrt(15)t))")
=sqrt(85)/25e^(-2t)cos(2sqrt(15)t-0.9976)")
")
=y_p (t)+y_c (t)")
=c_1cos(omega_0t)+c_2sin(omega_0t)")
)cos(omega t),")
t sin(omega_0 t)")
=F_0/(2m omega_0)t sin(omega_0 t)+")


 =sqrt(64)=8")
=1")


=1/8tsin(8t)+sqrt(5)/8cos(8t-2.6779)")
")
=c_1e^(-4t)+c_2e^(-16t)")
+Bsin(8t)")
+8Bcos(8t)")
-64Bsin(8t)")
+Bsin(8t))=2cos(8t)")
-160Asin(8t)=2cos(8t)")
")
+c_2e^(-16t)")



+1/120e^(-16t)")
/(dt^2) + ky = 0")
=1/10cos(7sqrt(6)t)+2/(7sqrt(6))sin(7sqrt(6)t)")
=e^(-9/26t)(5cos(sqrt(387)/(26)t)+45/sqrt(387)sin(sqrt(387)/(26)t))")
=-0.1 e^(-2t)+3.8te^(-2t)")
")
/dt+RI+1/Cq=E(t)")
=0, \ I'(0)=0")
=e^(-3t)(c_1cos(13t)+c_2sin(13t))")
+Bsin(10t)")
+10Bcos(10t)")
-100Bsin(10t)")
")
cos(10t)+(-60A+78B)sin(10t)=100cos(10t)")

+500/807sin(10t)")
(c_1cos(13t)+c_2sin(13t))")


(-650/807 cos(13t)-6950/10491 sin(13t))")
")
+0.08660cos(3t)")
+0.08660cos(3t) )")

=e^(-t)(9/3721cos(11t)-540/40931sin(11t))+9/61t-9/3721")
=10")
")
=int_0^ooe^(-st)f(t)dt")
=sin(2t)")
=cos(5t)")
=1/(s-4)")
=s/(s^2+4^2)")
=(6s)/(s^2-2^2)")

}-6\mathcal{L} {cos(4t)}+9\mathcal{L} { t^2}")
 )+9(2/(s^3) )")
f(t)}=F(s-a)")

.")
}")
^4)")
\} = s^2F(s) - s f(0) - f'(0)")

 - s^{n-1}f(0) - \cdots - f^{(n-1)}(0)")
=sin(0)=0")
}=s/(s^2+3^2)")
}=3/(s^2+3^2)")
 } = s \mathcal{L}{sin(3t) } - sin(0)")
)=s(3/(s^2+3^2))-0")
/(s^2+3^2)=(3s)/(s^2+3^2")
-y(0)")

=-360/s^(6)+9/(s^2+1),\ sgt0")
=10/((s - 1)^2+1),\ sgt1")


{c_1F_1+c_2F_2}=c_1\mathcal{L}^(-1){F_1}+c_2\mathcal{L}^(-1){F_2}")
\ harr\ s/(s^2+4^2)")
{s/ (s^2+16)}")
+8cos(4t)")
=(P(s))/(Q(s))")
^2+4^2")
 sin(bt)")
^2+4^2))")
 \ sin(4t)")
+B/(s-2)^2+C/(s+1)")
(s+1)+B(s+1)+C(s-2)^2")
-5=A(2-2)(2+1)+B(2+1)+C(2-2)^2")
^2-(-1)-5=A(-1-2)(-1+1)-(-1+1)+C(-1-2)^2")

)-1/(s-2)^2-1/3(1/(s+1))}")
}")
")
-t e^(2t)-1/3e^(-t)")
=-cos(7t)-6/7sin(7t)")
=-4 e^(-2t)-3 e^(t)")
 = 16/((s-7)^2+16)+(-5s)/(s^2+9)+8/(s^2+16)")
=4 e^(7t)sin(4t)-5cos(3t)+2sin(4t)")
=(F(s)+a(y'(0)+sy(0))+b y(0) )/(p(s))")
=-1, \ y'(0)=2")
}")
-sy(0)-y'(0)-5(sY(s)-y(0))+6Y(s)=4(1/(s+2))")
+s-2-5(sY(s)+1)+6Y(s)=4(1/(s+2))")
Y(s)=4/(s+2)-s+7")
-s+7)/(s^2-5s+6)")
=(-s^2+5s+18)/((s+2)(s-3)(s-2))")
=1/5 (1/(s+2))+24/5 (1/(s-3))-6 (1/(s-2))")
 +24/5 e^(3t)-6 e^(2t)")
=1, \ y'(0)=-1")
=s^2+4")
=\mathcal{L}^-1{3sin(t)}")
")
=(3//(s^2+1)+(-1+s(1)))/(s^2+4)")
+s-1)/(s^2+4)")
")
=(s^3-s^2+s+2)/((s^2+1)(s^2+4))")
=1/(s^2+1)+(s-2)/(s^2+4)")
+s/(s^2+4)- 2/(s^2+4)")
\ harr\ b/(s^2+b^2)")
\ harr\ s/(s^2+b^2)")
+cos(2t)-sin(2t)")
 = -1, \ quad y'(0) = 2")
=-3/7 e^(2t)-4/7 e^(-5t)")
 = 2, \ quad y'(0) = 0")
=e^(-3t)(2cos(2t)+3sin(2t))")
 = 1, \ quad y'(0) = -1")
=e^(4t)(1-5t)")
 = {(0,t lt 0),(1,t ge 0):}")
=u(t-a) = {(0,t lt a ),(1,t ge a ):}")
 = {(0,t lt a ),(M,t ge a ):}")
 = {(1,t lt a ),(0,t ge a ):}")
 = {(f_0(t), \ 0 le t lt a),(f_1(t), t ge a):}")
{(0, \ 0 le t lt a),(1, t ge a):}")
(1-u(t-a))+f_1(t)u(t-a)")
 = {(f_0(t), \ 0 le t lt a),(f_1(t), a le t lt b), (f_2(t), t ge b) :}")
g(t)}=e^(-as)\mathcal{L}{g(t+a)}")
=3t^2")

=3(t+1)^2")

}")





3t^2}=e^(-s)(6/s^3+6/s^2+3/s )")
 = {(2t-1, \ \ 0 le t lt 2),(4t, t ge 2):}")
=2t-1")
=4t")
= 2t-1+ u(t-2)(4t-2t+1)")
(2t+1)")
}=\mathcal{L}{2t-1}")
(2t+1) }")
=2t+1")
=2(t+2)+1")

\mathcal{L}{g(t+2)}")

 \mathcal{L}{2t+5 }")
(2/s^2+5/s)")
g(t-a)}=e^(-as)\mathcal{L}{g(t)}")
g(t-a)")

 G(s)")
=2/s-s/(s^2+1)+e^(-pi/2 s)((s-1)/(s^2+1))")
-sin(t)")
H_1(s)}")
(h_1(t-pi/2))")
(cos(t-pi/2)-sin(t-pi/2))")
(sin(t)+cos(t))")
+cos(t)")
 )=sin(t)+cos(t)")
=sin(t)+2")
 = {(2-cos(t), \ \ 0 le t lt pi/2),(sin(t)+2, t ge pi/2):}")
 = {(0,\"if\",t lt 3),(2 (t-3),\"if\",3 le t lt 7),(8,\"if\",t gt 7):}.")
=(2 e^(-3s))/s^2-(2 e^(-7s))/s^2")
=e^(-2s)/(s^2+4s+8)")
=1/2sin(2(t-2))e^(-2(t-2))u_2(t)")
 u_2(t) - 4 (t-3) u_3(t), \quad y(0) = y'(0) = 0")
=(4 e^(-2s)-4 e^(-3s))/(s^2(s^2+9))")
=k_0, \ \ y'(0)=k_1")
=4")
}")
-sy(0)-y'(0)-3(sY(s)-y(0))-10Y(s)=5/s-3e^(-2s)(1/s^2+2/s)")
-4-3sY(s)-10Y(s)=5/s-3e^(-2s)(1/s^2+2/s)")
Y(s)=5/s-3e^(-2s)(1/s^2+2/s)+4")
=5/(s(s^2-3s-10) )-(3e^(-2s))/(s^2(s^2-3s-10) ) -(6e^(-2s))/(s(s^2-3s-10) )+4/(s^2-3s-10)")
 )(-3e^(-2s) )")
(s-5) )(-3e^(-2s))")
=4F(s)+(5-6e^(-2s))G(s)+(-3e^(-2s)) H(s)")
)+1/7(1/(s-5))")
+1/14(1/(s+2))+1/35(1/(s-5))")
=1/(s^2(s+2)(s-5) )")
-1/10(1/s^2) -1/28(1/(s+2))+1/175(1/(s-5))")
+1/7e^(5t)")
+1/35e^(5t)")
/10-1/28e^(-2t)+1/175e^(5t)")
=4F(s)+5G(s)-3e^(-2s)(2G(s)+H(s))")
(2G(s)+H(s)) }")
+5g(t)-3u(t-2)(2g(t-2)+h(t-2))")
+1/7e^(5t))")
=0")
(0-(-1))")
+u(t-2)")
+u(t-2)}")
+9J(s)=1/s-(2e^-s)/s+e^(-2s)/s")
=1/(s(s^2+9))-(2e^-s)/(s(s^2+9))+e^(-2s)/(s(s^2+9))")
=G(s)-2e^-sG(s)+e^(-2s)G(s)")
-1/9(s/(s^2+9))")
")
G(s)}")
-2g(t-1)u(t-1)+g(t-2)u(t-2)")
))u(t-2)")
-1\ quad\ \ \ 0lttlt1),(1+cos(3t)-2cos(3t-3) \ \ \ 1lttlt2) ,(cos(3t)-2cos(3t-3)+cos(3t-6) \ \ tgt2):}")
 = y'(0) = 0")
=3/26(1-e^(-5(t-2))cos(t-2)-5 e^(-5(t-2))sin(t-2))")
,(0,t ge 6):}, \quad\ y(0) = y'(0) = 0")
=1/6+1/3 e^(3t)-1/2 e^(2t)")
=1/6+1/3 e^(3(t-6))-1/2 e^(2(t-6))")
,(0,t ge 9):}, \quad \ y(0) = y'(0) = 0")
=1/2+1/2 e^(2t)-e^(t)")
=1/2+1/2 e^(2(t-9))-e^((t-9))")
={(0 \ if\ t!=0),(oo \ if \ t=0):}")
 = 1")
={(0 \if \ t!=a),(oo \if \ t=a):}")
}=e^(-as)")
=0")
-s+16Y(s)=4e^(-pis)")
=(4e^(-pis) +s)/(s^2+16)")
 4/(s^2+16)+s/(s^2+16)")
")
, \quad \ y(0) = y'(0) = 0.")
 + delta(t-7), \quad \ y(0) = 11,\ y'(0) = 32")
/(s^2+10^2)")
-sI(0)-I'(0)=s^2J(s)")
-sI(0)=sJ(s)")
+6sJ(s)+178J(s)=(100s)/(s^2+10^2)")
=(100s)/((s^2+10^2)(s^2+6s+178))")
/(s^2+6s+178))")
^2+13^2))")
(-650/807cos(13t)-6950/10491sin(13t))")
/dt+0.2(dI_1)/dt=12")
/dt-2I_2=0")

")
")
+0.1sJ_3(s)+0.2sJ_1(s)=12/s),(0.1sJ_3(s)-2J_2(s)=0), (J_1(s)-J_2(s)-J_3(s)=0) :}")
=J_1(s)-J_3(s)")
+0.1sJ_3(s)+0.2sJ_1(s)=12/s),(0.1sJ_3(s)-2(J_1(s)-J_3(s))=0) :}")
J_1(s)+0.1sJ_3(s)=12/s),(-2J_1(s)+(0.1s+2)J_3(s)=0) :}")
12/s")
=(1.2+24/s)/(0.02s^2+s+8)")
/(s(s+10)(s+40))")
=3/s-2/(s+10)-1/(s+40)")
=(2J_1(s))/(0.1s+2)")
)/(s(s+10)(s+40)(0.1s+2))")
=1200/(s(s+10)(s+40))")
=3/s-4/(s+10)+1/(s+40)")
=J_1(s)-J_3(s)=2/(s+10)-2/(s+40)")
} =I_1(t)")
-e^(-40t)")
} =I_2(t)")
-2e^(-40t)")
} =I_3(t)")
+e^(-40t)")
^2+ a_3(x-x_0)^3+ ...")
 +sum_(n=2)^oo\ a_n(x-x_0)^n")
^oo\ a_nx^n")
^oo\ a_(n-k)x^(n-k)")
^oo\ a_(n+k)x^(n+k)")
=sum_(n=0)^oo\ b_n(x-x_0)^n")
+c_2g(x)=sum_(n=0)^oo\ (c_1a_n+c_2b_n)(x-x_0)^n")
^c sum_(n=0)^oo\ a_n(x-x_0)^n")
^oo\ a_n(x-x_0)^(n+c)")
^2 sum_(n=3)^oo na_n (x+2)^(n-4)-sum_(n=1)^oo na_n (x+2)^(n+1)")
^oo na_n (x+2)^(n-4+2)-sum_(n=1)^oo na_n (x+2)^(n+1)")
^oo na_n (x+2)^(n-2)-sum_(n=1)^oo na_n (x+2)^(n+1)")
^oo (n+2)a_(n+2) (x+2)^(n+2-2)-sum_(n=1+1)^oo (n-1)a_(n-1) (x+2)^(n-1+1)")
^oo (n+2)a_(n+2) (x+2)^(n)-sum_(n=2)^oo (n-1)a_(n-1) (x+2)^(n)")
^oo (n+2)a_(n+2) (x+2)^(n)-sum_(n=1)^oo (n-1)a_(n-1) (x+2)^(n)")
![=sum_(n=1)^oo [(n+2)a_(n+2)-(n-1)a_(n-1)] (x+2)^(n)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dsum_%28n%3D1%29%5Eoo%20%5B%28n%2B2%29a_%28n%2B2%29-%28n-1%29a_%28n-1%29%5D%20%28x%2B2%29%5E%28n%29&fg=000000&font=TeX&svg=1 "=sum_(n=1)^oo [(n+2)a_(n+2)-(n-1)a_(n-1)] (x+2)^(n)")
=sum_(n=1)^oo\ a_nd/(dx) (x-x_0)^n")
^oo\ na_n(x-x_0)^(n-1)")
=sum_(n=1)^oo\ na_nd/dx(x-x_0)^(n-1)")
^oo\ n(n-1)a_n(x-x_0)^(n-2)")
y''+2xy'-2y")
^oo\ n a_n x^(n-1)")
^oo\ n(n-1) a_n x^(n-2)")
^oo\ a_nx^n")
![sum_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=sum_%28n%3D0%29%5Eoo%5C%20%5B%28n%2B2%29%28n%2B1%29%20a_%28n%2B2%29%2B%28n%28n-1%29%2B2n-2%29a_n%5D%20x%5En&fg=000000&font=TeX&svg=1 "sum_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n")
^oo\ a_n(x-x_0)^n=sum_(n=0)^oo\ b_n(x-x_0)^n")
^oo\ a_n(x-x_0)^n=0")
=sum_(n=0)^oo\ f^(n)(x_0)/(n!)(x-x_0)^n")
+x^3/(3!)+...")
+x^5/(5!)- ...")
+x^4/(4!)- ...")
 = -a_n/((n+1)(n+4))")
=a_0/72")
^oo\ -3a_n x^n")
![sum_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-2n a_n-3a_n]x^n](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=sum_%28n%3D0%29%5E%28oo%29%5B%28n%2B2%29%28n%2B1%29a_%28n%2B2%29-2n%20a_n-3a_n%5Dx%5En&fg=000000&font=TeX&svg=1 "sum_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-2n a_n-3a_n]x^n")

![sum_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-5n a_n+2a_n]x^n](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=sum_%28n%3D0%29%5E%28oo%29%5B%28n%2B2%29%28n%2B1%29a_%28n%2B2%29-5n%20a_n%2B2a_n%5Dx%5En&fg=000000&font=TeX&svg=1 "sum_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-5n a_n+2a_n]x^n")
 = -a_n/((n+1)(n+2))")


y''+P_1(x)y'+P_2(x)y=0")
)/(P_0(x) )y'+(P_2(x))/(P_0(x) ) y=0")
=sum_(n=0)^oo\ a_n(x-x_0)^n")

^oo\ a_nx^n=0")
^oo\ a_kx^k=0")
![sum_(k=0)^oo\ [(k+2)(k+1) a_(k+2)+a_k] x^(k) =0](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=sum_%28k%3D0%29%5Eoo%5C%20%5B%28k%2B2%29%28k%2B1%29%20a_%28k%2B2%29%2Ba_k%5D%20x%5E%28k%29%20%3D0&fg=000000&font=TeX&svg=1 "sum_(k=0)^oo\ [(k+2)(k+1) a_(k+2)+a_k] x^(k) =0")
(k+1) a_(k+2)+a_k=0")
^oo\ a_(2m+1)x^(2m+1)")
^oo\ (-1)^mx^(2m+1) /((2m+1)!")
=sum_(m=0)^oo\ (-1)^mx^(2m+1) /((2m+1)!")
+a_1sin(x)")
^oo\ a_nx^n=0")
![sum_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n=0](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=sum_%28n%3D0%29%5Eoo%5C%20%5B%28n%2B2%29%28n%2B1%29%20a_%28n%2B2%29%2B%28n%28n-1%29%2B2n-2%29a_n%5D%20x%5En%3D0&fg=000000&font=TeX&svg=1 "sum_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n=0")
![sum_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n^2+n-2)a_n] x^n=0](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=sum_%28n%3D0%29%5Eoo%5C%20%5B%28n%2B2%29%28n%2B1%29%20a_%28n%2B2%29%2B%28n%5E2%2Bn-2%29a_n%5D%20x%5En%3D0&fg=000000&font=TeX&svg=1 "sum_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n^2+n-2)a_n] x^n=0")
(n+1) a_(n+2)+(n^2+n-2) a_n=0")
=-(n^2+n-2) /((n+2)(n+1) )a_n")
(n-1)) /((n+2)(n+1) )a_n")
=-(n-1) /(n+1)a_n")

+1) +sum_(m=1)^oo\ a_(2m)x^(2m)")
^oo\(-1)^(m+1)x^(2m)/(2m-1)")








![A = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]_(mxxn)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%20%3D%20%5B%5Ba_11%2C%20a_12%20%2C...%2C%20a_%281n%29%5D%2C%5Ba_21%2Ca_22%2C%20...%2C%20a_%282n%29%5D%2C%20%5Bvdots%2Cvdots%20%2Cddots%2C%20vdots%5D%20%2C%5Ba_%28m1%29%2C%20a_%28m2%29%20%2C%20...%2C%20a_%28mn%29%5D%20%5D_%28mxxn%29&fg=000000&font=TeX&svg=1 "A = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]_(mxxn)")
![y = [[a_11],[a_(21)], [vdots] ,[a_(m1)] ]_(mxx1)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=y%20%3D%20%5B%5Ba_11%5D%2C%5Ba_%2821%29%5D%2C%20%5Bvdots%5D%20%2C%5Ba_%28m1%29%5D%20%5D_%28mxx1%29&fg=000000&font=TeX&svg=1 "y = [[a_11],[a_(21)], [vdots] ,[a_(m1)] ]_(mxx1)")
![B = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]_(nxxn)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=B%20%3D%20%5B%5Ba_11%2C%20a_12%20%2C...%2C%20a_%281n%29%5D%2C%5Ba_21%2Ca_22%2C%20...%2C%20a_%282n%29%5D%2C%20%5Bvdots%2Cvdots%20%2Cddots%2C%20vdots%5D%20%2C%5Ba_%28n1%29%2C%20a_%28n2%29%20%2C%20...%2C%20a_%28n%5Cn%29%5D%20%5D_%28nxxn%29&fg=000000&font=TeX&svg=1 "B = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]_(nxxn)")
![C = [[a_11, 0 ,..., 0],[0,a_22, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., a_(n\n)] ]_(nxxn)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=C%20%3D%20%5B%5Ba_11%2C%200%20%2C...%2C%200%5D%2C%5B0%2Ca_22%2C%20...%2C%200%5D%2C%20%5Bvdots%2C%20vdots%2Cddots%2C%20vdots%5D%20%2C%5B0%2C%200%20%2C%20...%2C%20a_%28n%5Cn%29%5D%20%5D_%28nxxn%29&fg=000000&font=TeX&svg=1 "C = [[a_11, 0 ,..., 0],[0,a_22, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., a_(n\n)] ]_(nxxn)")
![I_n = [[1, 0 ,..., 0],[0,1, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 1] ]_(nxxn)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=I_n%20%3D%20%5B%5B1%2C%200%20%2C...%2C%200%5D%2C%5B0%2C1%2C%20...%2C%200%5D%2C%20%5Bvdots%2C%20vdots%2Cddots%2C%20vdots%5D%20%2C%5B0%2C%200%20%2C%20...%2C%201%5D%20%5D_%28nxxn%29&fg=000000&font=TeX&svg=1 "I_n = [[1, 0 ,..., 0],[0,1, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 1] ]_(nxxn)")
![0_(mxxn) = [[0, 0 ,..., 0],[0,0, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 0] ]_(mxxn)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=0_%28mxxn%29%20%3D%20%5B%5B0%2C%200%20%2C...%2C%200%5D%2C%5B0%2C0%2C%20...%2C%200%5D%2C%20%5Bvdots%2C%20vdots%2Cddots%2C%20vdots%5D%20%2C%5B0%2C%200%20%2C%20...%2C%200%5D%20%5D_%28mxxn%29&fg=000000&font=TeX&svg=1 "0_(mxxn) = [[0, 0 ,..., 0],[0,0, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 0] ]_(mxxn)")
![B=[[2,-4],[-2,5]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=B%3D%5B%5B2%2C-4%5D%2C%5B-2%2C5%5D%5D&fg=000000&font=TeX&svg=1 "B=[[2,-4],[-2,5]]")
![C=3[[-1,3],[0,7]] -[[2,-4],[-2,5]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=C%3D3%5B%5B-1%2C3%5D%2C%5B0%2C7%5D%5D%20-%5B%5B2%2C-4%5D%2C%5B-2%2C5%5D%5D&fg=000000&font=TeX&svg=1 "C=3[[-1,3],[0,7]] -[[2,-4],[-2,5]]")
![=[[-3,9],[0,21]] -[[2,-4],[-2,5]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%5B-3%2C9%5D%2C%5B0%2C21%5D%5D%20-%5B%5B2%2C-4%5D%2C%5B-2%2C5%5D%5D&fg=000000&font=TeX&svg=1 "=[[-3,9],[0,21]] -[[2,-4],[-2,5]]")
![=[[-3-2,9-(-4)],[0-(-2),21-5]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%5B-3-2%2C9-%28-4%29%5D%2C%5B0-%28-2%29%2C21-5%5D%5D&fg=000000&font=TeX&svg=1 "=[[-3-2,9-(-4)],[0-(-2),21-5]]")
![C=[[-5,13],[2,16]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=C%3D%5B%5B-5%2C13%5D%2C%5B2%2C16%5D%5D&fg=000000&font=TeX&svg=1 "C=[[-5,13],[2,16]]")

![B=[[-7,3,-1,0],[-5,1,4,3],[0,-2,1,2]].](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=B%3D%5B%5B-7%2C3%2C-1%2C0%5D%2C%5B-5%2C1%2C4%2C3%5D%2C%5B0%2C-2%2C1%2C2%5D%5D.&fg=000000&font=TeX&svg=1 "B=[[-7,3,-1,0],[-5,1,4,3],[0,-2,1,2]].")
(-7)+(4)(-5)+(-1)(0)=-27")
(3)+(4)(1)+(-1)(-2)=9")
(-1)+(4)(4)+(-1)(1)=14")
(0)+(4)(3)+(-1)(2)=10")
(-7)+(0)(-5)+(-5)(0)=-14")
(3)+(0)(1)+(-5)(-2)=16")
(-1)+(0)(4)+(-5)(1)=-7")
(0)+(0)(3)+(-5)(2)=-10")
![C=[[-27,9,14,10],[-14,16,-7,-10]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=C%3D%5B%5B-27%2C9%2C14%2C10%5D%2C%5B-14%2C16%2C-7%2C-10%5D%5D&fg=000000&font=TeX&svg=1 "C=[[-27,9,14,10],[-14,16,-7,-10]]")
=|A|")
![|[a_11,a_12],[a_21,a_22]|=a_11a_22-a_21a_12](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%7C%5Ba_11%2Ca_12%5D%2C%5Ba_21%2Ca_22%5D%7C%3Da_11a_22-a_21a_12&fg=000000&font=TeX&svg=1 "|[a_11,a_12],[a_21,a_22]|=a_11a_22-a_21a_12")
![|[a_11,a_12,a_13],[a_21,a_22,a_23] ,[a_31,a_32,a_33] |=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%7C%5Ba_11%2Ca_12%2Ca_13%5D%2C%5Ba_21%2Ca_22%2Ca_23%5D%20%2C%5Ba_31%2Ca_32%2Ca_33%5D%20%7C%3D&fg=000000&font=TeX&svg=1 "|[a_11,a_12,a_13],[a_21,a_22,a_23] ,[a_31,a_32,a_33] |=")
![a_11|[a_22,a_23],[a_32,a_33]|-](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=a_11%7C%5Ba_22%2Ca_23%5D%2C%5Ba_32%2Ca_33%5D%7C-&fg=000000&font=TeX&svg=1 "a_11|[a_22,a_23],[a_32,a_33]|-")
![a_12|[a_21,a_23],[a_31,a_33]|+](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=a_12%7C%5Ba_21%2Ca_23%5D%2C%5Ba_31%2Ca_33%5D%7C%2B&fg=000000&font=TeX&svg=1 "a_12|[a_21,a_23],[a_31,a_33]|+")
![a_13|[a_21,a_22],[a_31,a_32]|](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=a_13%7C%5Ba_21%2Ca_22%5D%2C%5Ba_31%2Ca_32%5D%7C&fg=000000&font=TeX&svg=1 "a_13|[a_21,a_22],[a_31,a_32]|")
![B= [[2,4,7],[5,-3,8],[0,-1,3] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=B%3D%20%5B%5B2%2C4%2C7%5D%2C%5B5%2C-3%2C8%5D%2C%5B0%2C-1%2C3%5D%20%5D&fg=000000&font=TeX&svg=1 "B= [[2,4,7],[5,-3,8],[0,-1,3] ]")

![|[-5,-1],[3,2]|=(-5)(2)-(3)(-1)=-7](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%7C%5B-5%2C-1%5D%2C%5B3%2C2%5D%7C%3D%28-5%29%282%29-%283%29%28-1%29%3D-7&fg=000000&font=TeX&svg=1 "|[-5,-1],[3,2]|=(-5)(2)-(3)(-1)=-7")
![|B|=|[2,4,7],[5,-3,8] ,[0,-1,3] |=](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%7CB%7C%3D%7C%5B2%2C4%2C7%5D%2C%5B5%2C-3%2C8%5D%20%2C%5B0%2C-1%2C3%5D%20%7C%3D&fg=000000&font=TeX&svg=1 "|B|=|[2,4,7],[5,-3,8] ,[0,-1,3] |=")
![2|[-3,8],[-1,3]|-](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=2%7C%5B-3%2C8%5D%2C%5B-1%2C3%5D%7C-&fg=000000&font=TeX&svg=1 "2|[-3,8],[-1,3]|-")
![4|[5,8],[0,3]|+](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=4%7C%5B5%2C8%5D%2C%5B0%2C3%5D%7C%2B&fg=000000&font=TeX&svg=1 "4|[5,8],[0,3]|+")
![7|[5,-3],[0,-1]|](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=7%7C%5B5%2C-3%5D%2C%5B0%2C-1%5D%7C&fg=000000&font=TeX&svg=1 "7|[5,-3],[0,-1]|")
(3)-(-1)(8))-4((5)(3)-(0)(8))+")
(-1)-(0)(-3))")
-4(15)+7(-5)")


} \text{adj}(A)")
![A^-1=1/(det(A))[[a_22,-a_12],[-a_21,a_11]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%5E-1%3D1%2F%28det%28A%29%29%5B%5Ba_22%2C-a_12%5D%2C%5B-a_21%2Ca_11%5D%5D&fg=000000&font=TeX&svg=1 "A^-1=1/(det(A))[[a_22,-a_12],[-a_21,a_11]]")
![[A|I]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5BA%7CI%5D&fg=000000&font=TeX&svg=1 "[A|I]")
![[I|A^-1]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5BI%7CA%5E-1%5D&fg=000000&font=TeX&svg=1 "[I|A^-1]")
![A=[[4,6],[2,6]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%5B4%2C6%5D%2C%5B2%2C6%5D%5D&fg=000000&font=TeX&svg=1 "A=[[4,6],[2,6]]")
(6)-(2)(6)=12")
![A^-1=1/12[[6,-6],[-2,4]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%5E-1%3D1%2F12%5B%5B6%2C-6%5D%2C%5B-2%2C4%5D%5D&fg=000000&font=TeX&svg=1 "A^-1=1/12[[6,-6],[-2,4]]")
![=[[1/2,-1/2],[-1/6,1/3]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%5B1%2F2%2C-1%2F2%5D%2C%5B-1%2F6%2C1%2F3%5D%5D&fg=000000&font=TeX&svg=1 "=[[1/2,-1/2],[-1/6,1/3]]")
![A=[[1,0,3],[-3,1,-9],[0,2,1]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%5B1%2C0%2C3%5D%2C%5B-3%2C1%2C-9%5D%2C%5B0%2C2%2C1%5D%5D&fg=000000&font=TeX&svg=1 "A=[[1,0,3],[-3,1,-9],[0,2,1]]")
![[[1,0,3,|,1,0,0],[-3,1,-9,|,0,1,0],[0,2,1,|,0,0,1]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5B1%2C0%2C3%2C%7C%2C1%2C0%2C0%5D%2C%5B-3%2C1%2C-9%2C%7C%2C0%2C1%2C0%5D%2C%5B0%2C2%2C1%2C%7C%2C0%2C0%2C1%5D%5D&fg=000000&font=TeX&svg=1 "[[1,0,3,|,1,0,0],[-3,1,-9,|,0,1,0],[0,2,1,|,0,0,1]]")
![[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,2,1,|,0,0,1]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5B1%2C0%2C3%2C%7C%2C1%2C0%2C0%5D%2C%5B0%2C1%2C0%2C%7C%2C3%2C1%2C0%5D%2C%5B0%2C2%2C1%2C%7C%2C0%2C0%2C1%5D%5D&fg=000000&font=TeX&svg=1 "[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,2,1,|,0,0,1]]")
![[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5B1%2C0%2C3%2C%7C%2C1%2C0%2C0%5D%2C%5B0%2C1%2C0%2C%7C%2C3%2C1%2C0%5D%2C%5B0%2C0%2C1%2C%7C%2C-6%2C-2%2C1%5D%5D&fg=000000&font=TeX&svg=1 "[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]")
![[[1,0,0,|,19,6,-3],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5B1%2C0%2C0%2C%7C%2C19%2C6%2C-3%5D%2C%5B0%2C1%2C0%2C%7C%2C3%2C1%2C0%5D%2C%5B0%2C0%2C1%2C%7C%2C-6%2C-2%2C1%5D%5D&fg=000000&font=TeX&svg=1 "[[1,0,0,|,19,6,-3],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]")
![A^-1=[[19,6,-3],[3,1,0],[-6,-2,1]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%5E-1%3D%5B%5B19%2C6%2C-3%5D%2C%5B3%2C1%2C0%5D%2C%5B-6%2C-2%2C1%5D%5D&fg=000000&font=TeX&svg=1 "A^-1=[[19,6,-3],[3,1,0],[-6,-2,1]]")
![A(t) = [[a_11(t), a_12(t) ,..., a_(1n)(t)],[a_21(t),a_22(t), ..., a_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a_(m1)(t), a_(m2)(t) , ..., a_(mn)(t) ] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%28t%29%20%3D%20%5B%5Ba_11%28t%29%2C%20a_12%28t%29%20%2C...%2C%20a_%281n%29%28t%29%5D%2C%5Ba_21%28t%29%2Ca_22%28t%29%2C%20...%2C%20a_%282n%29%28t%29%5D%2C%20%5Bvdots%2Cvdots%20%2Cddots%2C%20vdots%5D%20%2C%5Ba_%28m1%29%28t%29%2C%20a_%28m2%29%28t%29%20%2C%20...%2C%20a_%28mn%29%28t%29%20%5D%20%5D&fg=000000&font=TeX&svg=1 "A(t) = [[a_11(t), a_12(t) ,..., a_(1n)(t)],[a_21(t),a_22(t), ..., a_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a_(m1)(t), a_(m2)(t) , ..., a_(mn)(t) ] ]")
![A'(t) = [[a'_11(t), a'_12(t) ,..., a'_(1n)(t)],[a'_21(t),a'_22(t), ..., a'_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a'_(m1)(t), a'_(m2)(t) , ..., a'_(mn)(t)] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%27%28t%29%20%3D%20%5B%5Ba%27_11%28t%29%2C%20a%27_12%28t%29%20%2C...%2C%20a%27_%281n%29%28t%29%5D%2C%5Ba%27_21%28t%29%2Ca%27_22%28t%29%2C%20...%2C%20a%27_%282n%29%28t%29%5D%2C%20%5Bvdots%2Cvdots%20%2Cddots%2C%20vdots%5D%20%2C%5Ba%27_%28m1%29%28t%29%2C%20a%27_%28m2%29%28t%29%20%2C%20...%2C%20a%27_%28mn%29%28t%29%5D%20%5D&fg=000000&font=TeX&svg=1 "A'(t) = [[a'_11(t), a'_12(t) ,..., a'_(1n)(t)],[a'_21(t),a'_22(t), ..., a'_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a'_(m1)(t), a'_(m2)(t) , ..., a'_(mn)(t)] ]")
![intA(t)dt = [[inta_11(t)dt, inta_12(t)dt ,..., inta_(1n)(t)dt],[inta_21(t)dt,inta_22(t)dt, ..., inta_(2n)(t)dt], [vdots,vdots ,ddots, vdots] ,[inta_(m1)(t)dt, inta_(m2)(t)dt , ..., inta_(mn)(t)dt ] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=intA%28t%29dt%20%3D%20%5B%5Binta_11%28t%29dt%2C%20inta_12%28t%29dt%20%2C...%2C%20inta_%281n%29%28t%29dt%5D%2C%5Binta_21%28t%29dt%2Cinta_22%28t%29dt%2C%20...%2C%20inta_%282n%29%28t%29dt%5D%2C%20%5Bvdots%2Cvdots%20%2Cddots%2C%20vdots%5D%20%2C%5Binta_%28m1%29%28t%29dt%2C%20inta_%28m2%29%28t%29dt%20%2C%20...%2C%20inta_%28mn%29%28t%29dt%20%5D%20%5D&fg=000000&font=TeX&svg=1 "intA(t)dt = [[inta_11(t)dt, inta_12(t)dt ,..., inta_(1n)(t)dt],[inta_21(t)dt,inta_22(t)dt, ..., inta_(2n)(t)dt], [vdots,vdots ,ddots, vdots] ,[inta_(m1)(t)dt, inta_(m2)(t)dt , ..., inta_(mn)(t)dt ] ]")
![A(t) = [(4 e^(4t) , 3te^(-t^2)) , (t^2cos(-3t^3) , -5t^7)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%28t%29%20%3D%20%5B%284%20e%5E%284t%29%20%2C%203te%5E%28-t%5E2%29%29%20%2C%20%28t%5E2cos%28-3t%5E3%29%20%2C%20-5t%5E7%29%5D&fg=000000&font=TeX&svg=1 "A(t) = [(4 e^(4t) , 3te^(-t^2)) , (t^2cos(-3t^3) , -5t^7)]")
![intA(t)dt=[intA_(ij)(t)dt]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=intA%28t%29dt%3D%5BintA_%28ij%29%28t%29dt%5D&fg=000000&font=TeX&svg=1 "intA(t)dt=[intA_(ij)(t)dt]")
![=[(int4 e^(4t) dt, int3te^(-t^2)dt) , (intt^2cos(-3t^3)dt , int-5t^7dt)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28int4%20e%5E%284t%29%20dt%2C%20int3te%5E%28-t%5E2%29dt%29%20%2C%20%28intt%5E2cos%28-3t%5E3%29dt%20%2C%20int-5t%5E7dt%29%5D&fg=000000&font=TeX&svg=1 "=[(int4 e^(4t) dt, int3te^(-t^2)dt) , (intt^2cos(-3t^3)dt , int-5t^7dt)]")
![=[(e^(4t) , -3/2e^(-t^2)) , (-1/9sin(-3t^3) , -5/8t^8)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28e%5E%284t%29%20%2C%20-3%2F2e%5E%28-t%5E2%29%29%20%2C%20%28-1%2F9sin%28-3t%5E3%29%20%2C%20-5%2F8t%5E8%29%5D&fg=000000&font=TeX&svg=1 "=[(e^(4t) , -3/2e^(-t^2)) , (-1/9sin(-3t^3) , -5/8t^8)]")
![C=[(16,-6,22),(18,8,-6)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=C%3D%5B%2816%2C-6%2C22%29%2C%2818%2C8%2C-6%29%5D&fg=000000&font=TeX&svg=1 "C=[(16,-6,22),(18,8,-6)]")
![A^-1=[(-8,-3),(-21,-8)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%5E-1%3D%5B%28-8%2C-3%29%2C%28-21%2C-8%29%5D&fg=000000&font=TeX&svg=1 "A^-1=[(-8,-3),(-21,-8)]")
![A^-1=[(1,-2,0),(-1,3,0),(-2,8,1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%5E-1%3D%5B%281%2C-2%2C0%29%2C%28-1%2C3%2C0%29%2C%28-2%2C8%2C1%29%5D&fg=000000&font=TeX&svg=1 "A^-1=[(1,-2,0),(-1,3,0),(-2,8,1)]")
![AB=[(-30,-15),(-12,-18)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=AB%3D%5B%28-30%2C-15%29%2C%28-12%2C-18%29%5D&fg=000000&font=TeX&svg=1 "AB=[(-30,-15),(-12,-18)]")
![A(t) = [(-2 e^(4t) , 3te^(-3t^2)) , (-5tsin(4t^2) , -7t^-5)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%28t%29%20%3D%20%5B%28-2%20e%5E%284t%29%20%2C%203te%5E%28-3t%5E2%29%29%20%2C%20%28-5tsin%284t%5E2%29%20%2C%20-7t%5E-5%29%5D&fg=000000&font=TeX&svg=1 "A(t) = [(-2 e^(4t) , 3te^(-3t^2)) , (-5tsin(4t^2) , -7t^-5)]")
![[(-1/2 e^(4t) , -1/2e^(-3t^2)) , (5/8cos(4t^2) , 7/4t^-4)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-1%2F2%20e%5E%284t%29%20%2C%20-1%2F2e%5E%28-3t%5E2%29%29%20%2C%20%285%2F8cos%284t%5E2%29%20%2C%207%2F4t%5E-4%29%5D&fg=000000&font=TeX&svg=1 "[(-1/2 e^(4t) , -1/2e^(-3t^2)) , (5/8cos(4t^2) , 7/4t^-4)]")
![[[b_1],[b_2], [vdots] ,[b_m] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5Bb_1%5D%2C%5Bb_2%5D%2C%20%5Bvdots%5D%20%2C%5Bb_m%5D%20%5D&fg=000000&font=TeX&svg=1 "[[b_1],[b_2], [vdots] ,[b_m] ]")
 = bb(b)")
![[[a_11, a_12 ,..., a_(1n),|,b_1],[a_21,a_22, ..., a_(2n),|,b_2], [vdots,vdots ,ddots, vdots,|,vdots] ,[a_(m1), a_(m2) , ..., a_(mn),|,b_m] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5Ba_11%2C%20a_12%20%2C...%2C%20a_%281n%29%2C%7C%2Cb_1%5D%2C%5Ba_21%2Ca_22%2C%20...%2C%20a_%282n%29%2C%7C%2Cb_2%5D%2C%20%5Bvdots%2Cvdots%20%2Cddots%2C%20vdots%2C%7C%2Cvdots%5D%20%2C%5Ba_%28m1%29%2C%20a_%28m2%29%20%2C%20...%2C%20a_%28mn%29%2C%7C%2Cb_m%5D%20%5D&fg=000000&font=TeX&svg=1 "[[a_11, a_12 ,..., a_(1n),|,b_1],[a_21,a_22, ..., a_(2n),|,b_2], [vdots,vdots ,ddots, vdots,|,vdots] ,[a_(m1), a_(m2) , ..., a_(mn),|,b_m] ]")
_1, bb(v)_2, ..., bb(v)_n }.")

![bb v_1=[(1),( 5),(1)], \ bb v_2=[( -1),( 7),(-1)], \ bb v_3=[( 6),( 0),(9)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%20v_1%3D%5B%281%29%2C%28%205%29%2C%281%29%5D%2C%20%5C%20bb%20v_2%3D%5B%28%20-1%29%2C%28%207%29%2C%28-1%29%5D%2C%20%5C%20bb%20v_3%3D%5B%28%206%29%2C%28%200%29%2C%289%29%5D&fg=000000&font=TeX&svg=1 "bb v_1=[(1),( 5),(1)], \ bb v_2=[( -1),( 7),(-1)], \ bb v_3=[( 6),( 0),(9)]")
![V=[[1,-1,6],[5,7,0],[1,-1,9]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=V%3D%5B%5B1%2C-1%2C6%5D%2C%5B5%2C7%2C0%5D%2C%5B1%2C-1%2C9%5D%5D&fg=000000&font=TeX&svg=1 "V=[[1,-1,6],[5,7,0],[1,-1,9]]")
=36")
![bb v_1=[(5),( 6),(-10)], \ bb v_2=[( 1),( -1),(-2)], \ bb v_3=[( 4),( -2),(-8)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%20v_1%3D%5B%285%29%2C%28%206%29%2C%28-10%29%5D%2C%20%5C%20bb%20v_2%3D%5B%28%201%29%2C%28%20-1%29%2C%28-2%29%5D%2C%20%5C%20bb%20v_3%3D%5B%28%204%29%2C%28%20-2%29%2C%28-8%29%5D&fg=000000&font=TeX&svg=1 "bb v_1=[(5),( 6),(-10)], \ bb v_2=[( 1),( -1),(-2)], \ bb v_3=[( 4),( -2),(-8)]")
![V=[[5,1,4],[6,-1,-2],[-10,-2,-8]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=V%3D%5B%5B5%2C1%2C4%5D%2C%5B6%2C-1%2C-2%5D%2C%5B-10%2C-2%2C-8%5D%5D&fg=000000&font=TeX&svg=1 "V=[[5,1,4],[6,-1,-2],[-10,-2,-8]]")
=0")
![[[5,1,4,|,0],[6,-1,-2,|,0],[-10,-2,-8,|,0]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5B5%2C1%2C4%2C%7C%2C0%5D%2C%5B6%2C-1%2C-2%2C%7C%2C0%5D%2C%5B-10%2C-2%2C-8%2C%7C%2C0%5D%5D&fg=000000&font=TeX&svg=1 "[[5,1,4,|,0],[6,-1,-2,|,0],[-10,-2,-8,|,0]]")
![[[1,0,2/11,|,0],[0,1,34/11,|,0],[0,0,0,|,0]]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5B1%2C0%2C2%2F11%2C%7C%2C0%5D%2C%5B0%2C1%2C34%2F11%2C%7C%2C0%5D%2C%5B0%2C0%2C0%2C%7C%2C0%5D%5D&fg=000000&font=TeX&svg=1 "[[1,0,2/11,|,0],[0,1,34/11,|,0],[0,0,0,|,0]]")


=-2")
=-34")
+c_2 bb(v_2)+c_3 bb(v_3)=bb(0)")
-34bb(v_2)+11bb(v_3)=bb(0)")
,(-x+3y+2z = -6),(-4x+4y-z = -14):}")

=-14")

")
")
![A=[(3,5),(1,-1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%283%2C5%29%2C%281%2C-1%29%5D&fg=000000&font=TeX&svg=1 "A=[(3,5),(1,-1)]")
![=[(3-lambda,5),(1,-1-lambda) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%283-lambda%2C5%29%2C%281%2C-1-lambda%29%20%5D&fg=000000&font=TeX&svg=1 "=[(3-lambda,5),(1,-1-lambda) ]")
,(1,-1-lambda) |")
(lambda+1)-5")

(lambda+2)")
![[(u_1),(u_2)]=[(0),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28u_1%29%2C%28u_2%29%5D%3D%5B%280%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "[(u_1),(u_2)]=[(0),(0)]")
![[(1,-5,|,0),(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C-5%2C%7C%2C0%29%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,-5,|,0),(0,0,|,0) ]")

![bb(u_2)=[(u_1),(u_2)]=t[(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u_2%29%3D%5B%28u_1%29%2C%28u_2%29%5D%3Dt%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb(u_2)=[(u_1),(u_2)]=t[(-1),(1)]")
![A=[(-7,-1),(5,-9)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%28-7%2C-1%29%2C%285%2C-9%29%5D&fg=000000&font=TeX&svg=1 "A=[(-7,-1),(5,-9)]")
![=[(-7-lambda,-1),(5,-9-lambda)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-7-lambda%2C-1%29%2C%285%2C-9-lambda%29%5D&fg=000000&font=TeX&svg=1 "=[(-7-lambda,-1),(5,-9-lambda)]")
,(5,-9-lambda) |")
(9+lambda)+5")

^2+4")
^2+4=0")
^2=-4")


![[(5,-1+2i ,|,0),(5,-1+2i ,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%285%2C-1%2B2i%20%2C%7C%2C0%29%2C%285%2C-1%2B2i%20%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(5,-1+2i ,|,0),(5,-1+2i ,|,0) ]")
![[(1,-1/5+2/5i ,|,0) ,(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C-1%2F5%2B2%2F5i%20%2C%7C%2C0%29%20%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,-1/5+2/5i ,|,0) ,(0,0,|,0) ]")
 t")
![=[(1),(5)]-i[(2),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%281%29%2C%285%29%5D-i%5B%282%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "=[(1),(5)]-i[(2),(0)]")
![=[(1+2i),(5)] =[(1),(5)]+i[(2),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%281%2B2i%29%2C%285%29%5D%20%3D%5B%281%29%2C%285%29%5D%2Bi%5B%282%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "=[(1+2i),(5)] =[(1),(5)]+i[(2),(0)]")
![A=[(0,6,-2),(0,-2,0),(1,3,-3)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A%3D%5B%280%2C6%2C-2%29%2C%280%2C-2%2C0%29%2C%281%2C3%2C-3%29%5D&fg=000000&font=TeX&svg=1 "A=[(0,6,-2),(0,-2,0),(1,3,-3)]")
![=[(-lambda,6,-2),(0,-2-lambda,0) ,(1,3,-3-lambda)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-lambda%2C6%2C-2%29%2C%280%2C-2-lambda%2C0%29%20%2C%281%2C3%2C-3-lambda%29%5D&fg=000000&font=TeX&svg=1 "=[(-lambda,6,-2),(0,-2-lambda,0) ,(1,3,-3-lambda)]")
,(0,-2-lambda,0) ,(1,3,-3-lambda) |")
 ,(3,-3-lambda) |+|(6,-2),(-2-lambda,0) |")
(-3-lambda)-(-2-lambda)(-2)")
(lambda^2+3lambda+2)")
^2(lambda+1)")
![[(u_1),(u_2),(u_3)]=[(0),(0),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28u_1%29%2C%28u_2%29%2C%28u_3%29%5D%3D%5B%280%29%2C%280%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "[(u_1),(u_2),(u_3)]=[(0),(0),(0)]")
,(1,3,-1),(0,0,0) |")
,(0,0,0) ,(0,0,0) |")


,(0,-1,0) ,(0,-3,0) |")
,(0,1,0) ,(0,0,0) |")

")
y_n+f_1(t)),(y'_2=a_21y_1+a_22y_2+...+a_(2n)y_n+f_2(t) ),(vdots),(y'_n=a_(n1)y_1+a_(n2)y_2+...+a_(n\n)y_n+f_n(t) ) :}")
![[[f_1],[f_2], [vdots] ,[f_n] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5Bf_1%5D%2C%5Bf_2%5D%2C%20%5Bvdots%5D%20%2C%5Bf_n%5D%20%5D&fg=000000&font=TeX&svg=1 "[[f_1],[f_2], [vdots] ,[f_n] ]")
= A(t)bb(y) + bb(f)(t)")
![veck=[[k_1],[k_2], [vdots] ,[k_n] ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=veck%3D%5B%5Bk_1%5D%2C%5Bk_2%5D%2C%20%5Bvdots%5D%20%2C%5Bk_n%5D%20%5D&fg=000000&font=TeX&svg=1 "veck=[[k_1],[k_2], [vdots] ,[k_n] ]")
),(y'_2=y_1+y_2+e^(2t)) :}")
![[(y'_1),(y'_2)] =[(2,1),(1,1)][(y_1),(y_2)]+[(-3e^(2t)),(e^(2t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28y%27_1%29%2C%28y%27_2%29%5D%20%3D%5B%282%2C1%29%2C%281%2C1%29%5D%5B%28y_1%29%2C%28y_2%29%5D%2B%5B%28-3e%5E%282t%29%29%2C%28e%5E%282t%29%29%5D&fg=000000&font=TeX&svg=1 "[(y'_1),(y'_2)] =[(2,1),(1,1)][(y_1),(y_2)]+[(-3e^(2t)),(e^(2t))]")
![bb (y)'=[(2,1),(1,1)]bb"y"+[(-3),(1)]e^(2t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%20%28y%29%27%3D%5B%282%2C1%29%2C%281%2C1%29%5Dbb%22y%22%2B%5B%28-3%29%2C%281%29%5De%5E%282t%29&fg=000000&font=TeX&svg=1 "bb (y)'=[(2,1),(1,1)]bb\"y\"+[(-3),(1)]e^(2t)")
!["y"(t_0)=[(k_0),(k_1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%22y%22%28t_0%29%3D%5B%28k_0%29%2C%28k_1%29%5D&fg=000000&font=TeX&svg=1 "\"y\"(t_0)=[(k_0),(k_1)]")
=bb\"k\"")
![bb"y"=c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%3Dc_1%5B%28-5%29%2C%283%29%5De%5E%282t%29%2Bc_2%5B%282%29%2C%28-1%29%5De%5E%28t%29&fg=000000&font=TeX&svg=1 "bb\"y\"=c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)")
![bb"y'"=[(-4,-10),(3,7)]bb"y"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%27%22%3D%5B%28-4%2C-10%29%2C%283%2C7%29%5Dbb%22y%22&fg=000000&font=TeX&svg=1 "bb\"y'\"=[(-4,-10),(3,7)]bb\"y\"")
![bb"y"(0)=[(1),(-2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%280%29%3D%5B%281%29%2C%28-2%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(0)=[(1),(-2)]")
![+c_2[(-4,-10),(3,7)] [(2),(-1)]e^(t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2Bc_2%5B%28-4%2C-10%29%2C%283%2C7%29%5D%20%5B%282%29%2C%28-1%29%5De%5E%28t%29&fg=000000&font=TeX&svg=1 "+c_2[(-4,-10),(3,7)] [(2),(-1)]e^(t)")
![+c_2[(2),(-1)]e^(t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2Bc_2%5B%282%29%2C%28-1%29%5De%5E%28t%29&fg=000000&font=TeX&svg=1 "+c_2[(2),(-1)]e^(t)")
![c_1[(-5),(3)]d/dt( e^(2t))+c_2[(2),(-1)]d/dt( e^(t) )](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1%5B%28-5%29%2C%283%29%5Dd%2Fdt%28%20e%5E%282t%29%29%2Bc_2%5B%282%29%2C%28-1%29%5Dd%2Fdt%28%20e%5E%28t%29%20%29&fg=000000&font=TeX&svg=1 "c_1[(-5),(3)]d/dt( e^(2t))+c_2[(2),(-1)]d/dt( e^(t) )")
![=2c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D2c_1%5B%28-5%29%2C%283%29%5De%5E%282t%29%2Bc_2%5B%282%29%2C%28-1%29%5De%5E%28t%29&fg=000000&font=TeX&svg=1 "=2c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)")
![=c_1[(-10),(6)]e^(2t)+c_2[(2),(-1)]e^(t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dc_1%5B%28-10%29%2C%286%29%5De%5E%282t%29%2Bc_2%5B%282%29%2C%28-1%29%5De%5E%28t%29&fg=000000&font=TeX&svg=1 "=c_1[(-10),(6)]e^(2t)+c_2[(2),(-1)]e^(t)")

![[(1),(-2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%29%2C%28-2%29%5D&fg=000000&font=TeX&svg=1 "[(1),(-2)]")
,(3c_1-c_2=-2 ):}")

![bb(y)=-3[(-5),(3)]e^(2t)-7[(2),(-1)]e^(t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%3D-3%5B%28-5%29%2C%283%29%5De%5E%282t%29-7%5B%282%29%2C%28-1%29%5De%5E%28t%29&fg=000000&font=TeX&svg=1 "bb(y)=-3[(-5),(3)]e^(2t)-7[(2),(-1)]e^(t)")
y^{(n)} + a_{n-1}(t)y^{(n-1)} + cdots + a_1(t)y' + a_0(t)y = g(t)")



}")


} = x_n")
} = g(t) - a_{n-1}(t)y^{(n-1)} - cdots - a_1(t)y' - a_0(t)y")
 - a_{n-1}(t)x_n - cdots - a_1(t)x_2 - a_0(t)x_1")



=1,\ y'(0)=-1")

-2/3x_2+2x_1")
=y(0)=1")
=y'(0)=-1")
")
=1, \ x_2(0)=-1")
,(y_2' = 6 y_1 + 3 y_2 + 5 t^4):}")
![[(y_1'),(y_2')]=[(2,-2),(6,3)][(y_1),(y_2)]+[(-2),(5)]t^4](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28y_1%27%29%2C%28y_2%27%29%5D%3D%5B%282%2C-2%29%2C%286%2C3%29%5D%5B%28y_1%29%2C%28y_2%29%5D%2B%5B%28-2%29%2C%285%29%5Dt%5E4&fg=000000&font=TeX&svg=1 "[(y_1'),(y_2')]=[(2,-2),(6,3)][(y_1),(y_2)]+[(-2),(5)]t^4")
")

")
![[(x'),(y')] = [(3,-5),(2,4)] \ [(x),(y)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28x%27%29%2C%28y%27%29%5D%20%3D%20%5B%283%2C-5%29%2C%282%2C4%29%5D%20%5C%20%5B%28x%29%2C%28y%29%5D&fg=000000&font=TeX&svg=1 "[(x'),(y')] = [(3,-5),(2,4)] \ [(x),(y)]")

![[[c_1],[c_2], [vdots] ,[c_n] ]=bb"0"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%5Bc_1%5D%2C%5Bc_2%5D%2C%20%5Bvdots%5D%20%2C%5Bc_n%5D%20%5D%3Dbb%220%22&fg=000000&font=TeX&svg=1 "[[c_1],[c_2], [vdots] ,[c_n] ]=bb\"0\"")
![bb"c"=[[c_1],[c_2], [vdots] ,[c_n] ]=bb"0"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22c%22%3D%5B%5Bc_1%5D%2C%5Bc_2%5D%2C%20%5Bvdots%5D%20%2C%5Bc_n%5D%20%5D%3Dbb%220%22&fg=000000&font=TeX&svg=1 "bb\"c\"=[[c_1],[c_2], [vdots] ,[c_n] ]=bb\"0\"")
=|bb\"y\"_1 \ bb\"y\"_2 \ ... \ bb\"y\"_n|")
![bb"y"_2=[(-2),(-1)]e^(t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22_2%3D%5B%28-2%29%2C%28-1%29%5De%5E%28t%29&fg=000000&font=TeX&svg=1 "bb\"y\"_2=[(-2),(-1)]e^(t)")
![Y=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=Y%3D%5B%28-2e%5E%283t%29%2C-2e%5Et%29%2C%283e%5E%283t%29%2C-e%5Et%29%5D&fg=000000&font=TeX&svg=1 "Y=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]")
![[(c_1),(c_2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28c_1%29%2C%28c_2%29%5D&fg=000000&font=TeX&svg=1 "[(c_1),(c_2)]")
mathbf(u) = Ae^(rt)mathbf(u)")
 = Amathbf(u)")
mathbf(u) = 0")
![bb"y"_2=[(3),(1)]e^(4t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22_2%3D%5B%283%29%2C%281%29%5De%5E%284t%29&fg=000000&font=TeX&svg=1 "bb\"y\"_2=[(3),(1)]e^(4t)")
![bb"y"_2=[(-7),(-2)]e^(-4t)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22_2%3D%5B%28-7%29%2C%28-2%29%5De%5E%28-4t%29&fg=000000&font=TeX&svg=1 "bb\"y\"_2=[(-7),(-2)]e^(-4t)")


 = c_1e^{\lambda_1 t} \mathbf{u}_1 + c_2 e^{\lambda_2 t} \mathbf{u}_2 + \ldots + c_n e^{\lambda_n t} \mathbf{u}_n")
![bb"y"'=[(-6,-3),(1,-2)]bb"y"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%28-6%2C-3%29%2C%281%2C-2%29%5Dbb%22y%22&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(-6,-3),(1,-2)]bb\"y\"")
,(1,-2-lambda) |")
(lambda+2)+3")

(lambda+3)")
bb\"u\"=bb\"0\"")
bb(u)=bb(0)")
![[(1,1,|,0),(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C1%2C%7C%2C0%29%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,1,|,0),(0,0,|,0) ]")
![bb"y"(t)=c_1e^(-5t) [(-3),(1)]+c_2 e^(-3t) [(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3Dc_1e%5E%28-5t%29%20%5B%28-3%29%2C%281%29%5D%2Bc_2%20e%5E%28-3t%29%20%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=c_1e^(-5t) [(-3),(1)]+c_2 e^(-3t) [(-1),(1)]")
 = 7, \quad y_2(0) = 3")
![bb"y"(0)=[(7),(3)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%280%29%3D%5B%287%29%2C%283%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(0)=[(7),(3)]")
,(2,-7-lambda) |")
(-7-lambda)+30")

(lambda+2)")
![[(1,-3,|,0),(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C-3%2C%7C%2C0%29%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,-3,|,0),(0,0,|,0) ]")
bb\"u\"=bb\"0\"")
![[(1,-5/2,|,0),(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C-5%2F2%2C%7C%2C0%29%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,-5/2,|,0),(0,0,|,0) ]")
![bb"y"(t)=c_1e^(-t) [(3),(1)]+c_2 e^(-2t) [(5),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3Dc_1e%5E%28-t%29%20%5B%283%29%2C%281%29%5D%2Bc_2%20e%5E%28-2t%29%20%5B%285%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=c_1e^(-t) [(3),(1)]+c_2 e^(-2t) [(5),(2)]")
![c_1e^(0) [(3),(1)]+c_2 e^(0) [(5),(2)]=[(7),(3)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1e%5E%280%29%20%5B%283%29%2C%281%29%5D%2Bc_2%20e%5E%280%29%20%5B%285%29%2C%282%29%5D%3D%5B%287%29%2C%283%29%5D&fg=000000&font=TeX&svg=1 "c_1e^(0) [(3),(1)]+c_2 e^(0) [(5),(2)]=[(7),(3)]")
![[(7),(3)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%287%29%2C%283%29%5D&fg=000000&font=TeX&svg=1 "[(7),(3)]")
,(c_1+2c_2=3 ):}")
![bb"y"(t)=-e^(-t) [(3),(1)]+2 e^(-2t) [(5),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3D-e%5E%28-t%29%20%5B%283%29%2C%281%29%5D%2B2%20e%5E%28-2t%29%20%5B%285%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=-e^(-t) [(3),(1)]+2 e^(-2t) [(5),(2)]")
 = -3, \ y_2(0) = -1, \ y_3(0)=1")
![bb"y"(0)=[(-3),(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%280%29%3D%5B%28-3%29%2C%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(0)=[(-3),(-1),(1)]")
,(0,11-lambda,-7),(0,14,-10-lambda)|")
|(11-lambda,-7),(14,-10-lambda)|")
(lambda^2-lambda-12)")
(lambda+3)(lambda-4)")
![[(0,1,0,|,0),(0,0,1,|,0),(0,0,0,|,0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%280%2C1%2C0%2C%7C%2C0%29%2C%280%2C0%2C1%2C%7C%2C0%29%2C%280%2C0%2C0%2C%7C%2C0%29%5D&fg=000000&font=TeX&svg=1 "[(0,1,0,|,0),(0,0,1,|,0),(0,0,0,|,0)]")
![[(1,0,-1),(0,1,-1),(0,0,0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C0%2C-1%29%2C%280%2C1%2C-1%29%2C%280%2C0%2C0%29%5D&fg=000000&font=TeX&svg=1 "[(1,0,-1),(0,1,-1),(0,0,0)]")
bb\"u\"=bb\"0\"")
![[(1,0,-1),(0,1,-1/2),(0,0,0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C0%2C-1%29%2C%280%2C1%2C-1%2F2%29%2C%280%2C0%2C0%29%5D&fg=000000&font=TeX&svg=1 "[(1,0,-1),(0,1,-1/2),(0,0,0)]")
![bb"y"(t)=c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3Dc_1e%5E%283t%29%20%5B%281%29%2C%280%29%2C%280%29%5D%2Bc_2%20e%5E%284t%29%20%5B%281%29%2C%281%29%2C%281%29%5D%2Bc_3e%5E%28-3t%29%5B%282%29%2C%281%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]")
![c_1e^0 [(1),(0),(0)]+c_2 e^0 [(1),(1),(1)]+c_3e^0[(2),(1),(2)] =[(-3),(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1e%5E0%20%5B%281%29%2C%280%29%2C%280%29%5D%2Bc_2%20e%5E0%20%5B%281%29%2C%281%29%2C%281%29%5D%2Bc_3e%5E0%5B%282%29%2C%281%29%2C%282%29%5D%20%3D%5B%28-3%29%2C%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "c_1e^0 [(1),(0),(0)]+c_2 e^0 [(1),(1),(1)]+c_3e^0[(2),(1),(2)] =[(-3),(-1),(1)]")
,(c_2+c_3=-1 ),(c_2+2c_3=1):}")

![bb"y"(t)=-4e^(3t) [(1),(0),(0)]-3 e^(4t) [(1),(1),(1)]+2e^(-3t)[(2),(1),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3D-4e%5E%283t%29%20%5B%281%29%2C%280%29%2C%280%29%5D-3%20e%5E%284t%29%20%5B%281%29%2C%281%29%2C%281%29%5D%2B2e%5E%28-3t%29%5B%282%29%2C%281%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=-4e^(3t) [(1),(0),(0)]-3 e^(4t) [(1),(1),(1)]+2e^(-3t)[(2),(1),(2)]")
 = -3, \quad y'(0) = -13")

=y(0)=-3")
=y'(0)=-13")

![bb"x"(0)=[(-3),(-13)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22x%22%280%29%3D%5B%28-3%29%2C%28-13%29%5D&fg=000000&font=TeX&svg=1 "bb\"x\"(0)=[(-3),(-13)]")
,(10,-3-lambda) |")
(-3-lambda)-10")

(lambda+5)")
![[(-2,1),(10,-5) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-2%2C1%29%2C%2810%2C-5%29%20%5D&fg=000000&font=TeX&svg=1 "[(-2,1),(10,-5) ]")
![[(-2,1,|,0),(10,-5,|,0) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-2%2C1%2C%7C%2C0%29%2C%2810%2C-5%2C%7C%2C0%29%20%5D~&fg=000000&font=TeX&svg=1 "[(-2,1,|,0),(10,-5,|,0) ]~")
![[(1,-1/2,|,0),(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C-1%2F2%2C%7C%2C0%29%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,-1/2,|,0),(0,0,|,0) ]")
![[(5,1),(10,2) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%285%2C1%29%2C%2810%2C2%29%20%5D&fg=000000&font=TeX&svg=1 "[(5,1),(10,2) ]")
![[(5,1,|,0),(10,2,|,0) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%285%2C1%2C%7C%2C0%29%2C%2810%2C2%2C%7C%2C0%29%20%5D~&fg=000000&font=TeX&svg=1 "[(5,1,|,0),(10,2,|,0) ]~")
![[(1,1/5,|,0),(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C1%2F5%2C%7C%2C0%29%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,1/5,|,0),(0,0,|,0) ]")
![bb"x"(t)=c_1e^(2t) [(1),(2)]+c_2 e^(-5t) [(-1),(5)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22x%22%28t%29%3Dc_1e%5E%282t%29%20%5B%281%29%2C%282%29%5D%2Bc_2%20e%5E%28-5t%29%20%5B%28-1%29%2C%285%29%5D&fg=000000&font=TeX&svg=1 "bb\"x\"(t)=c_1e^(2t) [(1),(2)]+c_2 e^(-5t) [(-1),(5)]")
![c_1e^(0) [(1),(2)]+c_2 e^(0) [(-1),(5)]=[(-3),(-13)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1e%5E%280%29%20%5B%281%29%2C%282%29%5D%2Bc_2%20e%5E%280%29%20%5B%28-1%29%2C%285%29%5D%3D%5B%28-3%29%2C%28-13%29%5D&fg=000000&font=TeX&svg=1 "c_1e^(0) [(1),(2)]+c_2 e^(0) [(-1),(5)]=[(-3),(-13)]")
![[(-3),(-13)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-3%29%2C%28-13%29%5D&fg=000000&font=TeX&svg=1 "[(-3),(-13)]")
,(2c_1+5c_2=-13 ):}")

![bb"x"(t)=-4e^(2t) [(1),(2)]- e^(-5t) [(-1),(5)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22x%22%28t%29%3D-4e%5E%282t%29%20%5B%281%29%2C%282%29%5D-%20e%5E%28-5t%29%20%5B%28-1%29%2C%285%29%5D&fg=000000&font=TeX&svg=1 "bb\"x\"(t)=-4e^(2t) [(1),(2)]- e^(-5t) [(-1),(5)]")
+e^(-5t)")
 = 4, \quad y_2(0) = 1")
=6e^(3t)-2e^t")
=2e^(3t)-e^t")
![bb"y"'=[(-17,-30),(4,5)] bb"y"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%28-17%2C-30%29%2C%284%2C5%29%5D%20bb%22y%22&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(-17,-30),(4,5)] bb\"y\"")
![bb"y"(t)=c_1e^(-5t)[(-5),(2)]+c_2e^(-7t)[(-3),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3Dc_1e%5E%28-5t%29%5B%28-5%29%2C%282%29%5D%2Bc_2e%5E%28-7t%29%5B%28-3%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=c_1e^(-5t)[(-5),(2)]+c_2e^(-7t)[(-3),(1)]")
![mathbfy'(0)=[(3),(4),(7)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=mathbfy%27%280%29%3D%5B%283%29%2C%284%29%2C%287%29%5D&fg=000000&font=TeX&svg=1 "mathbfy'(0)=[(3),(4),(7)]")
![bb"y"(t)=-4e^t[(1),(0),(0)]+3e^(2t)[(2),(1),(2)] +e^(-4t)[(1),(1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3D-4e%5Et%5B%281%29%2C%280%29%2C%280%29%5D%2B3e%5E%282t%29%5B%282%29%2C%281%29%2C%282%29%5D%20%2Be%5E%28-4t%29%5B%281%29%2C%281%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=-4e^t[(1),(0),(0)]+3e^(2t)[(2),(1),(2)] +e^(-4t)[(1),(1),(1)]")
(bb\"a\"cos(betat)-bb\"b\"sin(beta t))")
(bb\"a\"sin(betat)+bb\"b\"cos(beta t))")
=c_1bb\"y\"_1+c_2 bb\"y\"_2")
=")
(bb\"a\"cos(betat)-bb\"b\"sin(beta t))+")
(bb\"a\"sin(betat)+bb\"b\"cos(beta t))")
![bb"y"'=[(5,6),(-3,-1)]bb"y"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%285%2C6%29%2C%28-3%2C-1%29%5Dbb%22y%22&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(5,6),(-3,-1)]bb\"y\"")
,(-3,-1-lambda) |")
(-1-lambda)+18")

^2+9")
bb\"u\"=bb\"0\"")
![[(3-i3,6,|,0),(-3,-3-i3,|,0) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%283-i3%2C6%2C%7C%2C0%29%2C%28-3%2C-3-i3%2C%7C%2C0%29%20%5D~&fg=000000&font=TeX&svg=1 "[(3-i3,6,|,0),(-3,-3-i3,|,0) ]~")
![[(1,1+i,|,0),(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C1%2Bi%2C%7C%2C0%29%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,1+i,|,0),(0,0,|,0) ]")
![=[(-1),(1)]+i[(-1),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-1%29%2C%281%29%5D%2Bi%5B%28-1%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "=[(-1),(1)]+i[(-1),(0)]")
![=[(-1),(1)]-i[(-1),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-1%29%2C%281%29%5D-i%5B%28-1%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "=[(-1),(1)]-i[(-1),(0)]")
![+c_2e^(2t)([(-1),(1)] sin(3t)+[(-1),(0)] cos(3 t))](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2Bc_2e%5E%282t%29%28%5B%28-1%29%2C%281%29%5D%20sin%283t%29%2B%5B%28-1%29%2C%280%29%5D%20cos%283%20t%29%29&fg=000000&font=TeX&svg=1 "+c_2e^(2t)([(-1),(1)] sin(3t)+[(-1),(0)] cos(3 t))")
![+c_2e^(2t)([(-sin(3t)-cos(3t)),(sin(3t))] )](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2Bc_2e%5E%282t%29%28%5B%28-sin%283t%29-cos%283t%29%29%2C%28sin%283t%29%29%5D%20%29&fg=000000&font=TeX&svg=1 "+c_2e^(2t)([(-sin(3t)-cos(3t)),(sin(3t))] )")
,(-15,-11-lambda) |")
(-11-lambda)+45")

^2+9")
![[(1,2/5-i1/5,|,0),(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C2%2F5-i1%2F5%2C%7C%2C0%29%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,2/5-i1/5,|,0),(0,0,|,0) ]")
![=[(-2),(5)]+i[(1),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-2%29%2C%285%29%5D%2Bi%5B%281%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "=[(-2),(5)]+i[(1),(0)]")
![=[(-2),(5)]-i[(1),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-2%29%2C%285%29%5D-i%5B%281%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "=[(-2),(5)]-i[(1),(0)]")
![+c_2e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2Bc_2e%5E%28-5t%29%28%5B%28-2%29%2C%285%29%5D%20sin%283t%29%2B%5B%281%29%2C%280%29%5D%20cos%283%20t%29%29&fg=000000&font=TeX&svg=1 "+c_2e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))")
![bb"y"(0)=[(-3),(12)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%280%29%3D%5B%28-3%29%2C%2812%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(0)=[(-3),(12)]")
![[(-3),(12)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-3%29%2C%2812%29%5D&fg=000000&font=TeX&svg=1 "[(-3),(12)]")
,(5c_1=12 ):}")

![+9/5e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2B9%2F5e%5E%28-5t%29%28%5B%28-2%29%2C%285%29%5D%20sin%283t%29%2B%5B%281%29%2C%280%29%5D%20cos%283%20t%29%29&fg=000000&font=TeX&svg=1 "+9/5e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))")
![bb"y"'=[(-7,-12),(6,5)] bb"y"](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%28-7%2C-12%29%2C%286%2C5%29%5D%20bb%22y%22&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(-7,-12),(6,5)] bb\"y\"")
![c_2e^(-t)([(-1),(1)]sin(6t)+[(1),(0)]cos(6t))](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_2e%5E%28-t%29%28%5B%28-1%29%2C%281%29%5Dsin%286t%29%2B%5B%281%29%2C%280%29%5Dcos%286t%29%29&fg=000000&font=TeX&svg=1 "c_2e^(-t)([(-1),(1)]sin(6t)+[(1),(0)]cos(6t))")
=-2 e^(-3t)cos(3t)+8 e^(-3t)sin(3t)")
=19 e^(-3t)cos(3t)-25 e^(-3t)sin(3t)")
=-2 e^(-2t)cos(t)+3 e^(-2t)sin(t)")
=11 e^(-2t)cos(t)-10 e^(-2t)sin(t)")

mathbf{v} = mathbf{u}.")
=c_1e^{lambda t}bb{u} + c_2e^{lambda t} (tbb{u} +bb{v} )")
![bb"y"(0)=[(-3),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%280%29%3D%5B%28-3%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(0)=[(-3),(2)]")
,(1,5-lambda) |")
(5-lambda)+1")

^2")
 I)bb\"u\"=bb\"0\"")
![[(-1,-1,|,0),(1,1,|,0) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-1%2C-1%2C%7C%2C0%29%2C%281%2C1%2C%7C%2C0%29%20%5D~&fg=000000&font=TeX&svg=1 "[(-1,-1,|,0),(1,1,|,0) ]~")
 I)bb{v} =bb{u}_1")
![[(v_1),(v_2)]=[(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28v_1%29%2C%28v_2%29%5D%3D%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "[(v_1),(v_2)]=[(-1),(1)]")
![[(-1,-1,|,-1),(1,1,|,1) ]~](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-1%2C-1%2C%7C%2C-1%29%2C%281%2C1%2C%7C%2C1%29%20%5D~&fg=000000&font=TeX&svg=1 "[(-1,-1,|,-1),(1,1,|,1) ]~")
![[(1,1,|,1),(0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C1%2C%7C%2C1%29%2C%280%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,1,|,1),(0,0,|,0) ]")
![bb{y}(t)=c_1e^{4 t}[(-1),(1)]+ c_2e^(4t)(t[(-1),(1)] +[(0),(1)])](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%7By%7D%28t%29%3Dc_1e%5E%7B4%20t%7D%5B%28-1%29%2C%281%29%5D%2B%20c_2e%5E%284t%29%28t%5B%28-1%29%2C%281%29%5D%20%2B%5B%280%29%2C%281%29%5D%29&fg=000000&font=TeX&svg=1 "bb{y}(t)=c_1e^{4 t}[(-1),(1)]+ c_2e^(4t)(t[(-1),(1)] +[(0),(1)])")
![[(-3),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-3%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "[(-3),(2)]")
,(c_1+c_2=2 ):}")
![bb{y}(t)=3e^{4 t}[(-1),(1)]-e^(4t)(t[(-1),(1)] +[(0),(1)])](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%7By%7D%28t%29%3D3e%5E%7B4%20t%7D%5B%28-1%29%2C%281%29%5D-e%5E%284t%29%28t%5B%28-1%29%2C%281%29%5D%20%2B%5B%280%29%2C%281%29%5D%29&fg=000000&font=TeX&svg=1 "bb{y}(t)=3e^{4 t}[(-1),(1)]-e^(4t)(t[(-1),(1)] +[(0),(1)])")
 = -2, \ y_2(0) = 5, \ y_3(0)=-5")
![bb(y)(0)=[(-2),(5),(-5)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%280%29%3D%5B%28-2%29%2C%285%29%2C%28-5%29%5D&fg=000000&font=TeX&svg=1 "bb(y)(0)=[(-2),(5),(-5)]")
,(0,3-lambda,0),(5,-1,-2-lambda) |")
|(3-lambda,1),(0,3-lambda)|")
(3-lambda)^2")
 I)bb\"u\"=bb\"0\"")
![=[(5,1,0),(0,5,0),(5,-1,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%285%2C1%2C0%29%2C%280%2C5%2C0%29%2C%285%2C-1%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "=[(5,1,0),(0,5,0),(5,-1,0) ]")
![[(1,0,0),(0,1,0),(0,0,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C0%2C0%29%2C%280%2C1%2C0%29%2C%280%2C0%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,0,0),(0,1,0),(0,0,0) ]")
 I)bb\"u\"=bb\"0\"")
![[(1,0,-1,|,0),(0,1,0,|,0) ,(0,0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C0%2C-1%2C%7C%2C0%29%2C%280%2C1%2C0%2C%7C%2C0%29%20%2C%280%2C0%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,0,-1,|,0),(0,1,0,|,0) ,(0,0,0,|,0) ]")
 I)bb{v} =bb{u}_2")
![[(0,1,0),(0,0,0),(5,-1,-5) ] [(v_1),(v_2),(v_3)]=[(1),(0),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%280%2C1%2C0%29%2C%280%2C0%2C0%29%2C%285%2C-1%2C-5%29%20%5D%20%5B%28v_1%29%2C%28v_2%29%2C%28v_3%29%5D%3D%5B%281%29%2C%280%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "[(0,1,0),(0,0,0),(5,-1,-5) ] [(v_1),(v_2),(v_3)]=[(1),(0),(1)]")
![[(1,0,-1,|,2/5),(0,1,0,|,1),(0,0,0,|,0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2C0%2C-1%2C%7C%2C2%2F5%29%2C%280%2C1%2C0%2C%7C%2C1%29%2C%280%2C0%2C0%2C%7C%2C0%29%20%5D&fg=000000&font=TeX&svg=1 "[(1,0,-1,|,2/5),(0,1,0,|,1),(0,0,0,|,0) ]")
![bb(y)_3=e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29_3%3De%5E%283t%29%28t%5B%281%29%2C%280%29%2C%281%29%5D%2B%5B%282%2F%2F5%29%2C%281%29%2C%280%29%5D%29&fg=000000&font=TeX&svg=1 "bb(y)_3=e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])")
![c_3e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_3e%5E%283t%29%28t%5B%281%29%2C%280%29%2C%281%29%5D%2B%5B%282%2F%2F5%29%2C%281%29%2C%280%29%5D%29&fg=000000&font=TeX&svg=1 "c_3e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])")
![[(-2),(5),(-5)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-2%29%2C%285%29%2C%28-5%29%5D&fg=000000&font=TeX&svg=1 "[(-2),(5),(-5)]")
,(c_3=5 ),(c_1+c_2=-5) :}")

![5e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=5e%5E%283t%29%28t%5B%281%29%2C%280%29%2C%281%29%5D%2B%5B%282%2F%2F5%29%2C%281%29%2C%280%29%5D%29&fg=000000&font=TeX&svg=1 "5e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])")
![bb"y"(t)=[(9 ),(-13)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3D%5B%289%20%29%2C%28-13%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=[(9 ),(-13)]")
=13 e^(-4t)-4(1+t)e^(-4t)")
=-13 e^(-4t)+4te^(-4t)")
![bb"y"(t)=[(-14 ),(-26)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3D%5B%28-14%20%29%2C%28-26%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=[(-14 ),(-26)]")
= 26 e^(-8t)-40(1+2t)e^(-8t)")
= -26 e^(-8t)+80te^(-8t)")
![bb"y"(t)=[(-9 ),(-18),(27)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%28t%29%3D%5B%28-9%20%29%2C%28-18%29%2C%2827%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"(t)=[(-9 ),(-18),(27)]")
![6e^(2t)(t[(3),(0),(4)]+[(13//4),(3),(0)])](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=6e%5E%282t%29%28t%5B%283%29%2C%280%29%2C%284%29%5D%2B%5B%2813%2F%2F4%29%2C%283%29%2C%280%29%5D%29&fg=000000&font=TeX&svg=1 "6e^(2t)(t[(3),(0),(4)]+[(13//4),(3),(0)])")
'=Abb(y)+bb(f)(t)")
![Y(t)= [bb(y)_1 \ bb(y)_2 \ ... \ bb(y)_n]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=Y%28t%29%3D%20%5Bbb%28y%29_1%20%5C%20bb%28y%29_2%20%5C%20...%20%5C%20bb%28y%29_n%5D&fg=000000&font=TeX&svg=1 "Y(t)= [bb(y)_1 \ bb(y)_2 \ ... \ bb(y)_n]")
(t)=int\ Y^-1(t)bb(f)(t) dt")
_p(t)=Y(t)*bb(v)(t)")
_p(t)=Y(t)int \ Y^-1(t)bb(f)(t) dt")
![bb"y"'=[(-4,-3),(6,5)]bb"y"+[(2),(-2e^t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%22y%22%27%3D%5B%28-4%2C-3%29%2C%286%2C5%29%5Dbb%22y%22%2B%5B%282%29%2C%28-2e%5Et%29%5D&fg=000000&font=TeX&svg=1 "bb\"y\"'=[(-4,-3),(6,5)]bb\"y\"+[(2),(-2e^t)]")
 =|(lambda+4,3),(-6,lambda-5) |")
(lambda-5)+18")

(lambda+1)")
![Y(t)=[(-e^(2t),-e^-t),(2e^(2t),e^-t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=Y%28t%29%3D%5B%28-e%5E%282t%29%2C-e%5E-t%29%2C%282e%5E%282t%29%2Ce%5E-t%29%5D&fg=000000&font=TeX&svg=1 "Y(t)=[(-e^(2t),-e^-t),(2e^(2t),e^-t)]")
![Y^-1(t)=1/(-e^(2t)e^-t+2e^(2t)e^-t)[(e^(-t),e^-t),(-2e^(2t),-e^(2t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=Y%5E-1%28t%29%3D1%2F%28-e%5E%282t%29e%5E-t%2B2e%5E%282t%29e%5E-t%29%5B%28e%5E%28-t%29%2Ce%5E-t%29%2C%28-2e%5E%282t%29%2C-e%5E%282t%29%29%5D&fg=000000&font=TeX&svg=1 "Y^-1(t)=1/(-e^(2t)e^-t+2e^(2t)e^-t)[(e^(-t),e^-t),(-2e^(2t),-e^(2t))]")
![=[(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28e%5E%28-2t%29%2Ce%5E%28-2t%29%29%2C%28-2e%5E%28t%29%2C-e%5E%28t%29%29%5D&fg=000000&font=TeX&svg=1 "=[(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))]")
=int\ Y^-1(t)bb\"f\"(t) dt")
![=int \ [(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))][(2),(-2e^t)] dt](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dint%20%5C%20%5B%28e%5E%28-2t%29%2Ce%5E%28-2t%29%29%2C%28-2e%5E%28t%29%2C-e%5E%28t%29%29%5D%5B%282%29%2C%28-2e%5Et%29%5D%20dt&fg=000000&font=TeX&svg=1 "=int \ [(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))][(2),(-2e^t)] dt")
![=int \ [(2e^(-2t)-2e^-t),(-4e^t+2e^(2t))] dt](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dint%20%5C%20%5B%282e%5E%28-2t%29-2e%5E-t%29%2C%28-4e%5Et%2B2e%5E%282t%29%29%5D%20dt&fg=000000&font=TeX&svg=1 "=int \ [(2e^(-2t)-2e^-t),(-4e^t+2e^(2t))] dt")
![=[(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-e%5E%28-2t%29%2B2e%5E-t%29%2C%28-4e%5Et%2Be%5E%282t%29%29%5D&fg=000000&font=TeX&svg=1 "=[(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]")
=Y(t).bb\"v\"(t)")
![=[(-e^(2t),-e^-t),(2e^(2t),e^-t)][(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-e%5E%282t%29%2C-e%5E-t%29%2C%282e%5E%282t%29%2Ce%5E-t%29%5D%5B%28-e%5E%28-2t%29%2B2e%5E-t%29%2C%28-4e%5Et%2Be%5E%282t%29%29%5D&fg=000000&font=TeX&svg=1 "=[(-e^(2t),-e^-t),(2e^(2t),e^-t)][(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]")

![+c_1e^(2t) [(-1),(2)] +c_2e^(-t) [(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2Bc_1e%5E%282t%29%20%5B%28-1%29%2C%282%29%5D%20%2Bc_2e%5E%28-t%29%20%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "+c_1e^(2t) [(-1),(2)] +c_2e^(-t) [(-1),(1)]")
![+[(-e^(2t),-e^-t),(2e^(2t),e^-t)] [(c_1),(c_2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2B%5B%28-e%5E%282t%29%2C-e%5E-t%29%2C%282e%5E%282t%29%2Ce%5E-t%29%5D%20%5B%28c_1%29%2C%28c_2%29%5D&fg=000000&font=TeX&svg=1 "+[(-e^(2t),-e^-t),(2e^(2t),e^-t)] [(c_1),(c_2)]")
![bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)+[(2e^t),(0),(-e^(2t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%27%3D%5B%283%2C14%2C-13%29%2C%280%2C11%2C-7%29%2C%280%2C14%2C-10%29%5Dbb%28y%29%2B%5B%282e%5Et%29%2C%280%29%2C%28-e%5E%282t%29%29%5D&fg=000000&font=TeX&svg=1 "bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)+[(2e^t),(0),(-e^(2t))]")
![bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%27%3D%5B%283%2C14%2C-13%29%2C%280%2C11%2C-7%29%2C%280%2C14%2C-10%29%5Dbb%28y%29&fg=000000&font=TeX&svg=1 "bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)")
![bb(f)(t)=[(2e^t),(0),(-e^(2t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28f%29%28t%29%3D%5B%282e%5Et%29%2C%280%29%2C%28-e%5E%282t%29%29%5D&fg=000000&font=TeX&svg=1 "bb(f)(t)=[(2e^t),(0),(-e^(2t))]")
![{e^(3t) [(1),(0),(0)], \ e^(4t) [(1),(1),(1)] ,\ e^(-3t)[(2),(1),(2)] }](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%7Be%5E%283t%29%20%5B%281%29%2C%280%29%2C%280%29%5D%2C%20%5C%20e%5E%284t%29%20%5B%281%29%2C%281%29%2C%281%29%5D%20%2C%5C%20e%5E%28-3t%29%5B%282%29%2C%281%29%2C%282%29%5D%20%7D&fg=000000&font=TeX&svg=1 "{e^(3t) [(1),(0),(0)], \ e^(4t) [(1),(1),(1)] ,\ e^(-3t)[(2),(1),(2)] }")
![Y"(t)=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=Y%22%28t%29%3D%5B%28e%5E%283t%29%2Ce%5E%284t%29%2C2e%5E%28-3t%29%29%2C%280%2Ce%5E%284t%29%2Ce%5E%28-3t%29%20%29%2C%280%2Ce%5E%284t%29%2C2e%5E%28-3t%29%20%29%20%5D&fg=000000&font=TeX&svg=1 "Y\"(t)=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]")
![[Y|I]~[I|Y^-1]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5BY%7CI%5D~%5BI%7CY%5E-1%5D&fg=000000&font=TeX&svg=1 "[Y|I]~[I|Y^-1]")
![Y^-1=[(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=Y%5E-1%3D%5B%28e%5E%28-3t%29%2C0%2C-e%5E%28-3t%29%29%2C%280%2C2e%5E%28-4t%29%2C-e%5E%28-4t%29%20%29%2C%280%2C-e%5E%283t%29%2Ce%5E%283t%29%20%29%20%5D&fg=000000&font=TeX&svg=1 "Y^-1=[(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ]")
![=int \ [(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ] [(2e^t),(0),(-e^(2t))] dt](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dint%20%5C%20%5B%28e%5E%28-3t%29%2C0%2C-e%5E%28-3t%29%29%2C%280%2C2e%5E%28-4t%29%2C-e%5E%28-4t%29%20%29%2C%280%2C-e%5E%283t%29%2Ce%5E%283t%29%20%29%20%5D%20%5B%282e%5Et%29%2C%280%29%2C%28-e%5E%282t%29%29%5D%20dt&fg=000000&font=TeX&svg=1 "=int \ [(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ] [(2e^t),(0),(-e^(2t))] dt")
![=int \ [(2e^(-2t)+e^(-t)),(e^(-2t)),(-e^(5t))] dt](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dint%20%5C%20%5B%282e%5E%28-2t%29%2Be%5E%28-t%29%29%2C%28e%5E%28-2t%29%29%2C%28-e%5E%285t%29%29%5D%20dt&fg=000000&font=TeX&svg=1 "=int \ [(2e^(-2t)+e^(-t)),(e^(-2t)),(-e^(5t))] dt")
![=[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28-e%5E%28-2t%29-e%5E%28-t%29%29%2C%28-1%2F2e%5E%28-2t%29%29%2C%28-1%2F5e%5E%285t%29%29%5D&fg=000000&font=TeX&svg=1 "=[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]")
![[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-e%5E%28-2t%29-e%5E%28-t%29%29%2C%28-1%2F2e%5E%28-2t%29%29%2C%28-1%2F5e%5E%285t%29%29%5D&fg=000000&font=TeX&svg=1 "[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]")
![=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D1%2F10%5B%28-10e%5E%28t%29-19e%5E%282t%29%29%2C%28-7e%5E%282t%29%29%2C%28-9e%5E%282t%29%29%5D&fg=000000&font=TeX&svg=1 "=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]")
![c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=c_1e%5E%283t%29%20%5B%281%29%2C%280%29%2C%280%29%5D%2Bc_2%20e%5E%284t%29%20%5B%281%29%2C%281%29%2C%281%29%5D%2Bc_3e%5E%28-3t%29%5B%282%29%2C%281%29%2C%282%29%5D&fg=000000&font=TeX&svg=1 "c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]")
![+[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ] [(c_1),(c_2),(c_3)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2B%5B%28e%5E%283t%29%2Ce%5E%284t%29%2C2e%5E%28-3t%29%29%2C%280%2Ce%5E%284t%29%2Ce%5E%28-3t%29%20%29%2C%280%2Ce%5E%284t%29%2C2e%5E%28-3t%29%20%29%20%5D%20%5B%28c_1%29%2C%28c_2%29%2C%28c_3%29%5D&fg=000000&font=TeX&svg=1 "+[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ] [(c_1),(c_2),(c_3)]")
![+[(-2),(5 e^t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2B%5B%28-2%29%2C%285%20e%5Et%29%5D&fg=000000&font=TeX&svg=1 "+[(-2),(5 e^t)]")
![bb(y)(t)=[(-26-90 e^t),(-18-65 e^t)]+[(3e^-t,4e^(2t)),(2e^-t,3e^(2t))][(c_1),(c_2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%28t%29%3D%5B%28-26-90%20e%5Et%29%2C%28-18-65%20e%5Et%29%5D%2B%5B%283e%5E-t%2C4e%5E%282t%29%29%2C%282e%5E-t%2C3e%5E%282t%29%29%5D%5B%28c_1%29%2C%28c_2%29%5D&fg=000000&font=TeX&svg=1 "bb(y)(t)=[(-26-90 e^t),(-18-65 e^t)]+[(3e^-t,4e^(2t)),(2e^-t,3e^(2t))][(c_1),(c_2)]")
![+[(2),(5 e^t)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2B%5B%282%29%2C%285%20e%5Et%29%5D&fg=000000&font=TeX&svg=1 "+[(2),(5 e^t)]")
![bb(y)(t)=[(-4-7.5 e^t),(6+10 e^t)]+[(-e^-t,-e^(2t)),(2e^-t,e^(2t))][(c_1),(c_2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%28t%29%3D%5B%28-4-7.5%20e%5Et%29%2C%286%2B10%20e%5Et%29%5D%2B%5B%28-e%5E-t%2C-e%5E%282t%29%29%2C%282e%5E-t%2Ce%5E%282t%29%29%5D%5B%28c_1%29%2C%28c_2%29%5D&fg=000000&font=TeX&svg=1 "bb(y)(t)=[(-4-7.5 e^t),(6+10 e^t)]+[(-e^-t,-e^(2t)),(2e^-t,e^(2t))][(c_1),(c_2)]")
![bb(I)(0)=[(0),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28I%29%280%29%3D%5B%280%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "bb(I)(0)=[(0),(0)]")
,(20,-20-lambda) |")
(-20-lambda)-200")

(lambda+40)")
![I_c(t)=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=I_c%28t%29%3D%5B%28e%5E%28-10t%29%2C-e%5E%28-40t%29%29%2C%282e%5E%28-10t%29%2Ce%5E%28-40t%29%29%5D&fg=000000&font=TeX&svg=1 "I_c(t)=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))]")
")
![I_c^-1(t)=1/3[(e^(10t),e^(10t)),(-2e^(40t),e^(40t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=I_c%5E-1%28t%29%3D1%2F3%5B%28e%5E%2810t%29%2Ce%5E%2810t%29%29%2C%28-2e%5E%2840t%29%2Ce%5E%2840t%29%29%5D&fg=000000&font=TeX&svg=1 "I_c^-1(t)=1/3[(e^(10t),e^(10t)),(-2e^(40t),e^(40t))]")
=int\ I_c^-1(t)bb\"f\"(t) dt")
![=int \ [(e^(10t),e^(10t)),(-2e^(40t),e^(40t))] [(60),(0)] dt](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3Dint%20%5C%20%5B%28e%5E%2810t%29%2Ce%5E%2810t%29%29%2C%28-2e%5E%2840t%29%2Ce%5E%2840t%29%29%5D%20%5B%2860%29%2C%280%29%5D%20dt&fg=000000&font=TeX&svg=1 "=int \ [(e^(10t),e^(10t)),(-2e^(40t),e^(40t))] [(60),(0)] dt")
![=[(2e^(10t)),(-e^(40t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%282e%5E%2810t%29%29%2C%28-e%5E%2840t%29%29%5D&fg=000000&font=TeX&svg=1 "=[(2e^(10t)),(-e^(40t))]")
=I_c(t).bb\"v\"(t)")
![=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))] [(2e^(10t)),(-e^(40t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%28e%5E%28-10t%29%2C-e%5E%28-40t%29%29%2C%282e%5E%28-10t%29%2Ce%5E%28-40t%29%29%5D%20%5B%282e%5E%2810t%29%29%2C%28-e%5E%2840t%29%29%5D&fg=000000&font=TeX&svg=1 "=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))] [(2e^(10t)),(-e^(40t))]")
_p+bb(I)_c")
![+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2Bc_1e%5E%28-10t%29%20%5B%281%29%2C%282%29%5D%20%2Bc_2e%5E%28-40t%29%20%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]")
![+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]=[(0),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%2Bc_1e%5E%28-10t%29%20%5B%281%29%2C%282%29%5D%20%2Bc_2e%5E%28-40t%29%20%5B%28-1%29%2C%281%29%5D%3D%5B%280%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]=[(0),(0)]")
,(2c_1+c_2=-3 ) :}")

![-2e^(-10t) [(1),(2)] +e^(-40t) [(-1),(1)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=-2e%5E%28-10t%29%20%5B%281%29%2C%282%29%5D%20%2Be%5E%28-40t%29%20%5B%28-1%29%2C%281%29%5D&fg=000000&font=TeX&svg=1 "-2e^(-10t) [(1),(2)] +e^(-40t) [(-1),(1)]")
-e^(-40t)")
+e^(-40t)")
+F_1(t)")
x_1+k_2x_2+F_1(t)")
+F_2(t)")
x_2+F_2(t)")


y_1+k_2y_3+F_1(t)")

y_3+F_2(t)")
'(t)=Abb(y)(t)+bb(f)(t)")
![bb(y)(t)+[(0),((F_1(t))/(m_1)),(0),((F_2(t))/(m_2)) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%28t%29%2B%5B%280%29%2C%28%28F_1%28t%29%29%2F%28m_1%29%29%2C%280%29%2C%28%28F_2%28t%29%29%2F%28m_2%29%29%20%5D&fg=000000&font=TeX&svg=1 "bb(y)(t)+[(0),((F_1(t))/(m_1)),(0),((F_2(t))/(m_2)) ]")
![bb(y)=[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%3D%5B%28y_1%29%2C%28y_2%29%2C%28y_3%29%2C%28y_4%29%5D%3D%5B%28x_1%29%2C%28x%27_1%29%2C%28x_2%29%2C%28x%27_2%29%5D&fg=000000&font=TeX&svg=1 "bb(y)=[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]")
![bb(y)(t), \ \ bb(y)(0)=[(0),(0),(1),(0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%28t%29%2C%20%5C%20%5C%20bb%28y%29%280%29%3D%5B%280%29%2C%280%29%2C%281%29%2C%280%29%20%5D&fg=000000&font=TeX&svg=1 "bb(y)(t), \ \ bb(y)(0)=[(0),(0),(1),(0) ]")
![bb(u)_(1,2)=[(0),(1),(0),(1)]+-i [(-1),(0),(-1),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u%29_%281%2C2%29%3D%5B%280%29%2C%281%29%2C%280%29%2C%281%29%5D%2B-i%20%5B%28-1%29%2C%280%29%2C%28-1%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "bb(u)_(1,2)=[(0),(1),(0),(1)]+-i [(-1),(0),(-1),(0)]")
![bb(u)_(3,4)=[(0),(-3),(0),(3)]+-i [(sqrt(3)),(0),(-sqrt(3)),(0)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28u%29_%283%2C4%29%3D%5B%280%29%2C%28-3%29%2C%280%29%2C%283%29%5D%2B-i%20%5B%28sqrt%283%29%29%2C%280%29%2C%28-sqrt%283%29%29%2C%280%29%5D&fg=000000&font=TeX&svg=1 "bb(u)_(3,4)=[(0),(-3),(0),(3)]+-i [(sqrt(3)),(0),(-sqrt(3)),(0)]")
![[(sin(t)),(cos(t)),(sin(t)),(cos(t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28sin%28t%29%29%2C%28cos%28t%29%29%2C%28sin%28t%29%29%2C%28cos%28t%29%29%5D&fg=000000&font=TeX&svg=1 "[(sin(t)),(cos(t)),(sin(t)),(cos(t))]")
![[(-cos(t)),(sin(t)),(-cos(t)),(sin(t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-cos%28t%29%29%2C%28sin%28t%29%29%2C%28-cos%28t%29%29%2C%28sin%28t%29%29%5D&fg=000000&font=TeX&svg=1 "[(-cos(t)),(sin(t)),(-cos(t)),(sin(t))]")
![[(-sqrt(3) sin(sqrt(3) t)),(-3cos(sqrt(3) t)),(sqrt(3) sin(sqrt(3) t)),(3cos(sqrt(3) t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28-sqrt%283%29%20sin%28sqrt%283%29%20t%29%29%2C%28-3cos%28sqrt%283%29%20t%29%29%2C%28sqrt%283%29%20sin%28sqrt%283%29%20t%29%29%2C%283cos%28sqrt%283%29%20t%29%29%5D&fg=000000&font=TeX&svg=1 "[(-sqrt(3) sin(sqrt(3) t)),(-3cos(sqrt(3) t)),(sqrt(3) sin(sqrt(3) t)),(3cos(sqrt(3) t))]")
![[(sqrt(3) cos(sqrt(3) t)),(-3sin(sqrt(3) t)),(-sqrt(3) cos(sqrt(3) t)),(3sin(sqrt(3) t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28sqrt%283%29%20cos%28sqrt%283%29%20t%29%29%2C%28-3sin%28sqrt%283%29%20t%29%29%2C%28-sqrt%283%29%20cos%28sqrt%283%29%20t%29%29%2C%283sin%28sqrt%283%29%20t%29%29%5D&fg=000000&font=TeX&svg=1 "[(sqrt(3) cos(sqrt(3) t)),(-3sin(sqrt(3) t)),(-sqrt(3) cos(sqrt(3) t)),(3sin(sqrt(3) t))]")
![[(bb(y)_1,bb(y)_2, bb(y)_3, bb(y)_4)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28bb%28y%29_1%2Cbb%28y%29_2%2C%20bb%28y%29_3%2C%20bb%28y%29_4%29%5D&fg=000000&font=TeX&svg=1 "[(bb(y)_1,bb(y)_2, bb(y)_3, bb(y)_4)]")
![= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%20%5B%28sin%28t%29%2C-cos%28t%29%2C-sqrt%283%29%20sin%28sqrt%283%29%20t%29%2Csqrt%283%29%20cos%28sqrt%283%29%20t%29%29%2C%28cos%28t%29%2Csin%28t%29%2C-3%20cos%28sqrt%283%29%20t%29%2C-3sin%28sqrt%283%29%20t%29%29%2C%28sin%28t%29%2C-cos%28t%29%2Csqrt%283%29%20sin%28sqrt%283%29%20t%29%2C-sqrt%283%29%20cos%28sqrt%283%29%20t%29%29%2C%28cos%28t%29%2Csin%28t%29%2C3%20cos%28sqrt%283%29%20t%29%2C3%20sin%28sqrt%283%29%20t%29%29%5D&fg=000000&font=TeX&svg=1 "= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]")
![bb(y)(0)=[(0),(0),(1),(0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=bb%28y%29%280%29%3D%5B%280%29%2C%280%29%2C%281%29%2C%280%29%20%5D&fg=000000&font=TeX&svg=1 "bb(y)(0)=[(0),(0),(1),(0) ]")
![=[(0),(0),(1),(0) ]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%280%29%2C%280%29%2C%281%29%2C%280%29%20%5D&fg=000000&font=TeX&svg=1 "=[(0),(0),(1),(0) ]")

![[(0),(-1/2),(0),(-sqrt(3)/6)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%280%29%2C%28-1%2F2%29%2C%280%29%2C%28-sqrt%283%29%2F6%29%5D&fg=000000&font=TeX&svg=1 "[(0),(-1/2),(0),(-sqrt(3)/6)]")
![[(1/2cos(t)-1/2cos(sqrt(3)t)),(-1/2sin(t)+(sqrt(3))/2sin(sqrt(3)t)),(1/2cos(t)+1/2cos(sqrt(3)t)),(-1/2sin(t)-(sqrt(3))/2sin(sqrt(3)t))]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%281%2F2cos%28t%29-1%2F2cos%28sqrt%283%29t%29%29%2C%28-1%2F2sin%28t%29%2B%28sqrt%283%29%29%2F2sin%28sqrt%283%29t%29%29%2C%281%2F2cos%28t%29%2B1%2F2cos%28sqrt%283%29t%29%29%2C%28-1%2F2sin%28t%29-%28sqrt%283%29%29%2F2sin%28sqrt%283%29t%29%29%5D&fg=000000&font=TeX&svg=1 "[(1/2cos(t)-1/2cos(sqrt(3)t)),(-1/2sin(t)+(sqrt(3))/2sin(sqrt(3)t)),(1/2cos(t)+1/2cos(sqrt(3)t)),(-1/2sin(t)-(sqrt(3))/2sin(sqrt(3)t))]")
![[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B%28y_1%29%2C%28y_2%29%2C%28y_3%29%2C%28y_4%29%5D%3D%5B%28x_1%29%2C%28x%27_1%29%2C%28x_2%29%2C%28x%27_2%29%5D&fg=000000&font=TeX&svg=1 "[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]")
-1/2cos(sqrt(3)t)")
+1/2cos(sqrt(3)t)")
+sqrt(3)/3sin(sqrt(3)t)")
-sqrt(3)/3sin(sqrt(3)t)")
![f(x) = a_0 + sum_{n=1}^{infty} [a_n cos(frac{npi x}{L}) + b_n sin(frac{npi x}{L})]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=f%28x%29%20%3D%20a_0%20%2B%20sum_%7Bn%3D1%7D%5E%7Binfty%7D%20%5Ba_n%20cos%28frac%7Bnpi%20x%7D%7BL%7D%29%20%2B%20b_n%20sin%28frac%7Bnpi%20x%7D%7BL%7D%29%5D&fg=000000&font=TeX&svg=1 "f(x) = a_0 + sum_{n=1}^{infty} [a_n cos(frac{npi x}{L}) + b_n sin(frac{npi x}{L})]")
 dx")

![f(x) = a_0 + sum_{n=1}^{infty} [a_n cos(frac{npi x}{2}) + b_n sin(frac{npi x}{2})]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=f%28x%29%20%3D%20a_0%20%2B%20sum_%7Bn%3D1%7D%5E%7Binfty%7D%20%5Ba_n%20cos%28frac%7Bnpi%20x%7D%7B2%7D%29%20%2B%20b_n%20sin%28frac%7Bnpi%20x%7D%7B2%7D%29%5D&fg=000000&font=TeX&svg=1 "f(x) = a_0 + sum_{n=1}^{infty} [a_n cos(frac{npi x}{2}) + b_n sin(frac{npi x}{2})]")

 dx")
![=[-(2x)/(npi)cos((npix)/2)]_0^2+2/(npi) int_0^2cos((npix)/2 )dx](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B-%282x%29%2F%28npi%29cos%28%28npix%29%2F2%29%5D_0%5E2%2B2%2F%28npi%29%20int_0%5E2cos%28%28npix%29%2F2%20%29dx&fg=000000&font=TeX&svg=1 "=[-(2x)/(npi)cos((npix)/2)]_0^2+2/(npi) int_0^2cos((npix)/2 )dx")
![=[-(2x)/(npi)cos((npix)/2)+4/(npi)^2 sin((npix)/2 )]_0^2](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B-%282x%29%2F%28npi%29cos%28%28npix%29%2F2%29%2B4%2F%28npi%29%5E2%20sin%28%28npix%29%2F2%20%29%5D_0%5E2&fg=000000&font=TeX&svg=1 "=[-(2x)/(npi)cos((npix)/2)+4/(npi)^2 sin((npix)/2 )]_0^2")
)/(npi)")
^(n+1))/(npi)")
 = sum_{n=1}^{infty} (4(-1)^(n+1))/(npi) sin(frac{npi x}{2})")

![a_0 = 1/2 int_{0}^{2} x^2 dx=1/2[x^3/3]_0^2=4/3](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=a_0%20%3D%201%2F2%20int_%7B0%7D%5E%7B2%7D%20x%5E2%20dx%3D1%2F2%5Bx%5E3%2F3%5D_0%5E2%3D4%2F3&fg=000000&font=TeX&svg=1 "a_0 = 1/2 int_{0}^{2} x^2 dx=1/2[x^3/3]_0^2=4/3")
 dx")
![=[(2x^2)/(npi)sin((npix)/2)]_0^2-4/(npi) int_0^2 xsin((npix)/2 ) dx](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%282x%5E2%29%2F%28npi%29sin%28%28npix%29%2F2%29%5D_0%5E2-4%2F%28npi%29%20int_0%5E2%20xsin%28%28npix%29%2F2%20%29%20dx&fg=000000&font=TeX&svg=1 "=[(2x^2)/(npi)sin((npix)/2)]_0^2-4/(npi) int_0^2 xsin((npix)/2 ) dx")
![=[(2x^2)/(npi)sin((npix)/2)-16/(npi)^3((-npi)/2xcos((npix)/2)+sin((npix)/2))]_0^2](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%282x%5E2%29%2F%28npi%29sin%28%28npix%29%2F2%29-16%2F%28npi%29%5E3%28%28-npi%29%2F2xcos%28%28npix%29%2F2%29%2Bsin%28%28npix%29%2F2%29%29%5D_0%5E2&fg=000000&font=TeX&svg=1 "=[(2x^2)/(npi)sin((npix)/2)-16/(npi)^3((-npi)/2xcos((npix)/2)+sin((npix)/2))]_0^2")
cos(npi)")
^(n))/(n^2pi^2)")
 = 4/3 + sum_{n=1}^{infty} (16(-1)^(n))/(n^2pi^2) cos(frac{npi x}{2})")
![[-1,1]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%5B-1%2C1%5D&fg=000000&font=TeX&svg=1 "[-1,1]")
 = sum_{n=1}^{infty} (8(-1)^(n+1))/(npi) sin(npi x)")
 = 2/3 - sum_{n=1}^{infty} (4(-1)^(n))/(n^2pi^2) cos(npi x)")
/(delt)(x,t)=beta^2(del^2u)/(delx^2)(x,t)")

 = 0 quad text{and} quad u(L, t) = 0")
 = X(x)T(t)")
X(x)=beta^2X''(x)T(t)")
}{T(t)} = frac{X''(x)}{X(x)}")
}{T(t)} = frac{X''(x)}{X(x)} =-lambda")
}{X(x)} =-lambda")
}{T(t)} =-lambda")
 + lambda X(x) = 0")
=c_1cos(sqrt(lambda)x)+c_2sin(sqrt(lambda)x)")
=c_1+c_2x")
=c_1e^(-sqrt(lambda)x)+c_2e^(sqrt(lambda)x)")
) -e^(-Lsqrt(lambda)) )=0")
) -e^(-Lsqrt(lambda)) =0")
 + beta^2 left( frac{npi}{L} right)^2 T(t) = 0")
 = sum_{n=1}^{infty} B_n sinleft( frac{npi x}{L} right) e^{-beta^2 left( frac{npi}{L} right)^2 t}")
=f(x)=sum_(n=1)^ooB_n sin((npix)/L)")
sin((npix)/L) dx")


+7sin(5x)")
=sum_(n=1)^oo B_n e^(-beta^2(npi//L)^2t)sin((npix)/L)")
=B_1e^(-5((1)pi//pi)^2t)sin(((1)pix)/pi) +B_5e^(-5((5)pi//pi)^2t)sin(((5)pix)/pi)")
=6e^(-5t)sin(x) +7e^(-125 t)sin(5x)")

sin((npix)/L)dx")
/4)dx")
![B_n=[-2/(npi)xcos((npix)/4)]_0^4+2/(npi)int_0^4cos((npix)/4)dx](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=B_n%3D%5B-2%2F%28npi%29xcos%28%28npix%29%2F4%29%5D_0%5E4%2B2%2F%28npi%29int_0%5E4cos%28%28npix%29%2F4%29dx&fg=000000&font=TeX&svg=1 "B_n=[-2/(npi)xcos((npix)/4)]_0^4+2/(npi)int_0^4cos((npix)/4)dx")
cos(npi)+8/(n^2pi^2) sin(npi)")
^(n+1)8/(npi)")
=8/(pi)sum_(n=1)^oo (-1)^(n+1)/n e^(-9(npi//4)^2t)sin((npix)/4)")
 = 0 quad text{and} quad u_x(L, t) = 0")
 = A_0+sum_{n=1}^{infty} A_n cos( frac{npi x}{L} ) e^{-beta^2 ( frac{npi}{L} )^2 t}")
 = A_0+sum_{n=1}^{infty} A_n cos( frac{npi x}{L} )")
 dx")
 cos(frac{npi x}{L}) dx")

![A_0 = frac{1}{2} int_{0}^{2} 5x^2 dx=5/2[x^3/3]_0^2=20/3](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=A_0%20%3D%20frac%7B1%7D%7B2%7D%20int_%7B0%7D%5E%7B2%7D%205x%5E2%20dx%3D5%2F2%5Bx%5E3%2F3%5D_0%5E2%3D20%2F3&fg=000000&font=TeX&svg=1 "A_0 = frac{1}{2} int_{0}^{2} 5x^2 dx=5/2[x^3/3]_0^2=20/3")
 dx")
![=[(10x^2)/(npi)sin((npix)/2)]_0^2-20/(npi) int_0^2 xsin((npix)/2 ) dx](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%2810x%5E2%29%2F%28npi%29sin%28%28npix%29%2F2%29%5D_0%5E2-20%2F%28npi%29%20int_0%5E2%20xsin%28%28npix%29%2F2%20%29%20dx&fg=000000&font=TeX&svg=1 "=[(10x^2)/(npi)sin((npix)/2)]_0^2-20/(npi) int_0^2 xsin((npix)/2 ) dx")
![=[(10x^2)/(npi)sin((npix)/2)-80/(npi)^3((-npi)/2xcos((npix)/2)+sin((npix)/2))]_0^2](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=%3D%5B%2810x%5E2%29%2F%28npi%29sin%28%28npix%29%2F2%29-80%2F%28npi%29%5E3%28%28-npi%29%2F2xcos%28%28npix%29%2F2%29%2Bsin%28%28npix%29%2F2%29%29%5D_0%5E2&fg=000000&font=TeX&svg=1 "=[(10x^2)/(npi)sin((npix)/2)-80/(npi)^3((-npi)/2xcos((npix)/2)+sin((npix)/2))]_0^2")
cos(npi)")
^(n))/(n^2pi^2)")
^(n))/(n^2pi^2) cos( frac{npi x}{2} ) e^{-4 ( frac{npi}{2} )^2 t}")


=sum_(n=1)^oo(12(1-(-1)^n))/(npi)sin((npix)/3)e^(-5((npi)/3)^2t)")

=-2 e^(-32t)sin(4x)-7 e^(-50t)sin(5x)")
=15+sum_(n=1)^oo(180 (-1)^n)/(n^2 pi^2) cos((n pi x)/3) e^(-6((n pi)/ 3)^2 t)")
/(delt^2)(x,t)=alpha^2(del^2u)/(delx^2)(x,t) \ ,")


![u(x,t)=sum_(n=1)^oo[A_n cos((npialphat)/L)+(B_nL)/(npialpha)sin((npialphat)/L )]](https://atu0g9ctah.execute-api.ca-central-1.amazonaws.com/latest/asciimath?asciimath=u%28x%2Ct%29%3Dsum_%28n%3D1%29%5Eoo%5BA_n%20cos%28%28npialphat%29%2FL%29%2B%28B_nL%29%2F%28npialpha%29sin%28%28npialphat%29%2FL%20%29%5D&fg=000000&font=TeX&svg=1 "u(x,t)=sum_(n=1)^oo[A_n cos((npialphat)/L)+(B_nL)/(npialpha)sin((npialphat)/L )]")
/L)")
=sum_(n=1)^ooB_n sin((npix)/L)")
sin((npix)/L) dx")
^oo A_nsin(nx)")
=sin(3x)-1/2sin(5x)")
-1/2sin(5x)")

^oo (-2nA_n sin(2nt)+B_ncos(2nt) )sin(nx)")
^oo B_nsin(nx)")
/(delt)(x,0)=sin(4x)+2sin(6x)")
+2sin(6x)")

=sum_(n=1)^oo (A_n cos(2nt)+B_n/(2n)sin(2nt))sin(nx)")
sin(5x)+1/6sin(12t)sin(6x)")


=-cos(3t)sin(x)-1/6sin(12t)sin(4x)+")
sin(7x)+1/30sin(30t)sin(10x)")
sin(3x)+1/4sin(12t)sin(6x)")