La modélisation mathématique est le processus qui consiste à traduire des problèmes du monde réel en langage mathématique. Il s’agit de formuler, de développer et de tester rigoureusement des modèles pour représenter et résoudre des problèmes complexes. Les équations différentielles, qu’elles soient ordinaires ou partielles, jouent un rôle essentiel dans ces modèles. Elles relient une fonction à ses dérivées, qui représentent les taux de changement. Elles sont donc particulièrement adaptées à la modélisation de systèmes dynamiques pour lesquels il est essentiel de comprendre l’évolution des choses.
Dans cette section, nous allons voir comment les équations différentielles du premier ordre sont appliquées dans divers domaines, notamment les processus de croissance et de décroissance, le mélange de substances, la loi de refroidissement de Newton, la dynamique de la chute d’objets et l’analyse des circuits électriques.
L’une des applications les plus courantes des équations différentielles du premier ordre est la modélisation de la croissance ou de la décroissance démographique. Les modèles permettent de comprendre comment les populations évoluent dans le temps en raison des naissances, des décès, de l’immigration et de l’émigration. Le modèle de croissance démographique le plus simple est le modèle de croissance exponentielle, qui suppose un environnement aux ressources illimitées. Il est représenté par l’équation différentielle suivante :
/(dt)=rP")
où  est la taille de la population, et
est la taille de la population, et  est la constante de proportionnalité. La solution de cette équation différentielle séparable est
est la constante de proportionnalité. La solution de cette équation différentielle séparable est
=P_0e^(rt)")
où  est la population initiale à l’instant
est la population initiale à l’instant  .
.
Si <span class= »AM » title= »r , la population décroît exponentiellement et si
, la population décroît exponentiellement et si  0″ title= »r>0″ class= »asciimath mathjax »>, la population croît exponentiellement. Ce modèle implique que la population croît continuellement et sans limites, ce qui n’est démographiquement guère réaliste à long terme compte tenu des limitations de ressources, d’espace, etc. Toutefois, il s’agit d’une bonne approximation pour les populations ne présentant pas de contraintes significatives en matière de ressources ou pour les prévisions à court terme.
0″ title= »r>0″ class= »asciimath mathjax »>, la population croît exponentiellement. Ce modèle implique que la population croît continuellement et sans limites, ce qui n’est démographiquement guère réaliste à long terme compte tenu des limitations de ressources, d’espace, etc. Toutefois, il s’agit d’une bonne approximation pour les populations ne présentant pas de contraintes significatives en matière de ressources ou pour les prévisions à court terme.
Lorsqu’il s’agit de problèmes où les taux d’entrée et de sortie de population d’une région sont différents, il est essentiel de comprendre que le taux global de variation de la population est le résultat de la différence entre le taux d’entrée de la population (immigrations ou naissances) et le taux de sortie de la population (émigrations ou décès). Ce taux peut être représenté sous la forme d’une équation différentielle qui modélise la variation nette de la population au fil du temps. L’approche générale consiste à établir une équation d’équilibre reflétant ces taux :
/(dt)=R_(\"entrée\")-R_(\"sortie\")")
Ici, ") est le taux auquel la population entre dans la région et
est le taux auquel la population entre dans la région et ") est le taux auquel la population quitte la région.
est le taux auquel la population quitte la région.
Exemple 2.5.1 : Variation démographique
Une population de poissons dans un lac croît à un rythme proportionnel à sa taille actuelle. En l’absence de facteurs extérieurs, la population de poissons double en dix jours. Cependant, chaque jour, cinq poissons migrent dans la zone, seize sont capturés par les pêcheurs et sept meurent de causes naturelles. Déterminer si la population survivra au fil du temps et, si ce n’est pas le cas, quand elle s’éteindra. La population initiale est de 200 poissons.
Afficher/Masquer la solution
Disons que P(t) est la population de poissons à l’instant t (en jours). Le taux de croissance est proportionnel à la population, ce qui peut être représenté par rP(t), où r est la constante de proportionnalité. Les taux de migration nette et de mortalité contribuent en tant que constantes au taux de variation de la population. L’équation de la variation démographique nette par jour est la suivante :
Ainsi, l’équation différentielle avec la condition initiale devient :
/(dt)=rP(t)-18,")
=200")
Avant de résoudre ce PVI, il faut trouver en utilisant l’information sur le doublement de la population en dix jours sans facteurs externes. Si la population initiale est de 200, alors elle atteindra 400 en deux jours.
/(dt)=rP(t),")
=400")
La solution générale de cette équation différentielle séparable est
En appliquant la condition initiale, on obtient
=400")
=2")
/10")
Maintenant, revenons à l’équation différentielle originale.
/(dt)=ln(2)/10 P-18,")
Il s’agit d’une équation différentielle linéaire, que nous écrivons sous forme standard :
/(dt)-ln(2)/10 P=-18")
Le facteur intégrant est
=e^(-int(ln(2))/10 dt)=e^(-(ln(2))/10 t)")
La solution générale est
![P(t)=e^((ln(2))/10 t) [int -18 e^(-(ln(2))/10 t) dt+C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f55a70c813a5ab457392aba7ef43166d-2.png "P(t)=e^((ln(2))/10 t) [int -18 e^(-(ln(2))/10 t) dt+C]")
![P(t)=e^((ln(2))/10 t) [18(10/(ln(2)) )e^(-(ln(2))/10 t) +C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/285dc3c2660cdb2056d390829a6697f8-2.png "P(t)=e^((ln(2))/10 t) [18(10/(ln(2)) )e^(-(ln(2))/10 t) +C]")
=180/(ln(2)) +Ce^((ln(2))/10 t)")
En appliquant la condition initiale, on obtient
) +Ce^0=200")

La solution spécifique est donc
=180/(ln(2)) -59.6851 e^((ln(2))/10 t)")
Le terme exponentiel a un exposant positif et croît donc de manière exponentielle. Cependant, comme le coefficient du terme exponentiel est négatif, l’ensemble de la population diminue et finit par disparaître. Pour déterminer quand la population finira par s’éteindre, il faut prendre  et trouver la valeur de
et trouver la valeur de  .
.
) -59.6851 e^((ln(2))/10 t)")
 jours
jours
Les problèmes de mélanges consistent à combiner des substances ou des quantités et à observer leur interaction dans le temps. Il peut s’agir de polluants dans un lac, de différents produits chimiques dans un réacteur, voire de sucre se dissolvant dans du café. L’élément commun à ces scénarios est le changement de concentration des substances dans un mélange au fil du temps. Les équations différentielles, en particulier celles du premier ordre, permettent de modéliser et de résoudre ces situations dynamiques.
Dans les problèmes de mélanges, ") représente la quantité de substance dissoute dans le fluide, qui évolue avec le temps au débit (
représente la quantité de substance dissoute dans le fluide, qui évolue avec le temps au débit (/(dt)") ). Le débit est influencé par les entrées et sorties de la substance.
). Le débit est influencé par les entrées et sorties de la substance.
Pour un problème de mélanges type, on peut avoir un réservoir contenant une certaine quantité de fluide dans lequel une autre substance est mélangée. La concentration de la substance dans le réservoir change au fur et à mesure que l’on ajoute ou que l’on retire de la substance. L’équation différentielle générale du premier ordre pour un tel scénario est similaire à celle que nous avons examinée pour l’évolution démographique d’une région.
/(dt)=R_(\"entrée\")-R_(\"sortie\")")
Ici, ") est le taux auquel la substance entre dans le système et
est le taux auquel la substance entre dans le système et ") est le taux auquel la substance quitte le système.
est le taux auquel la substance quitte le système.
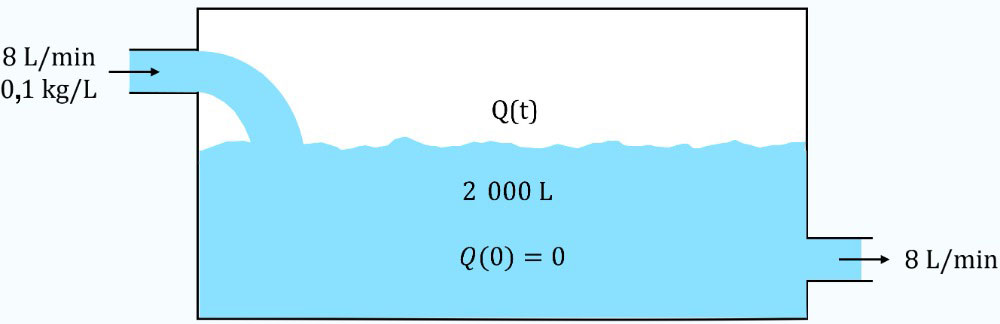
Exemple 2.5.2 : Problème de mélanges avec les mêmes taux d’entrée et de sortie
Prenons une citerne renfermant 2 000 litres d’eau fraîche. En commençant à l’instant , l’eau contenant 0,1 kilogramme de sel par litre est versée dans la citerne au taux de  . Le mélange est maintenu uniforme par agitation et est évacué de la citerne au même rythme qu’il est rempli. a) Formule une équation différentielle pour la quantité de sel dans la citerne () à n’importe quel instant et résous l’équation pour déterminer . b) Déterminer quand la concentration de sel dans la citerne va atteindre
. Le mélange est maintenu uniforme par agitation et est évacué de la citerne au même rythme qu’il est rempli. a) Formule une équation différentielle pour la quantité de sel dans la citerne () à n’importe quel instant et résous l’équation pour déterminer . b) Déterminer quand la concentration de sel dans la citerne va atteindre  .
.
Afficher/Masquer la solution
Informations données
- Le volume d’eau dans la citerne (
 ) est constant puisque les entrées et sorties d’eau sont égales :
) est constant puisque les entrées et sorties d’eau sont égales : 
- Débit d’entrée d’eau

- Débit de sortie d’eau
- Concentration de sel entrant :

a) Notre tâche consiste à déterminer le taux auquel le sel entre dans la citerne () et le taux auquel il quitte la citerne. Il ne faut pas oublier que le taux auquel l’eau entre dans la citerne est différent du taux auquel le sel pénètre et quitte la citerne.
Le taux auquel le sel entre dans la citerne est le produit de la concentration de sel de l’eau entrante et le débit d’entrée de l’eau :
 = (0,1 \"kg/L\")(8 \"L/min\")")

Le taux auquel le sel quitte la citerne est la concentration de sel dans la citerne (rapport entre le sel dans la citerne et le volume d’eau dans la citerne), multipliée par le débit de sortie de l’eau. À tout moment, la quantité de sel dans la citerne est .

)/2000 \ \"kg/L\")*(8 \ \"L/min\")")
)/250")
Au départ, la citerne ne contient que de l’eau pure non salée, de sorte que =0") . Ainsi, l’équation différentielle avec une condition initiale devient
. Ainsi, l’équation différentielle avec une condition initiale devient
/(dt)=0,8-(Q(t))/250") ,
,
L’équation différentielle est séparable (et linéaire) et peut donc être facilement résolue. La solution du PVI est
=200(1-e^(-t/250))")
Cette équation nous donne le volume de sel dans la citerne en kilogrammes à tout instant t après le début du processus.
b) Pour déterminer quand la concentration de sel dans la citerne atteint , il faut d’abord trouver une équation pour la concentration en termes de temps. La concentration est le rapport entre la quantité de sel et le volume d’eau. Le volume reste constant à 2 000 litres. Ainsi, la concentration ") à l’instant t est la quantité de sel divisée par le volume total :
à l’instant t est la quantité de sel divisée par le volume total :
=(Q(t))/V \ \"kg/L\"")
=200/2000(1-e^(-t/250))")
)")
Maintenant, il faut trouver la valeur de t quand =0,04 \ \"kg/L\"") .
.
=0,04")
)=0,04")
=1,4")
")

La concentration de sel dans la citerne atteindra 0,04 kg/L environ  minutes après le début du processus.
minutes après le début du processus.
La loi de refroidissement de Newton décrit la vitesse à laquelle la température d’un objet change lorsqu’il est exposé à un environnement dont la température est différente et constante. Le principe fondamental est que le taux de variation de température (/(dt)") ) est proportionnel à la différence entre la température de l’objet (
) est proportionnel à la différence entre la température de l’objet ( ) et la température ambiante (
) et la température ambiante ( ). L’équation différentielle représentant la loi de refroidissement de Newton est donc
). L’équation différentielle représentant la loi de refroidissement de Newton est donc
/(dt)=-k(T-T_s)")
Dans cette équation, représente la température de l’objet à n’importe quel instant , est la température ambiante constante,  est une constante positive dépendante des caractéristiques de l’objet et de son milieu environnant et est le taux de variation de la température. Lorsque la température initiale est dénotée par
est une constante positive dépendante des caractéristiques de l’objet et de son milieu environnant et est le taux de variation de la température. Lorsque la température initiale est dénotée par  , le problème de valeur initiale est
, le problème de valeur initiale est
/(dt)=-k(T-T_s), \ \ T(0)=T_0")
Cette équation différentielle est séparable (et linéaire), et a pour solution
 = T_s +(T_0-T_s)e^(-kt)") (2.5.1)
(2.5.1)
Le signe négatif de l’exposant indique que la différence de température entre l’objet et son milieu environnant diminue exponentiellement avec le temps. Cette formule est valable même si l’objet est initialement plus chaud ou plus froid que son milieu environnant, décrivant à la fois les processus de refroidissement et de réchauffement selon les hypothèses de la loi.
Exemple 2.5.3 : Loi de refroidissement de Newton
Prenons un microprocesseur fonctionnant dans un environnement dans lequel la température ambiante est constante à 25 ◦C. Après une longue période de fonctionnement, la température du microprocesseur est de 75 ◦C. Une fois l’appareil éteint, le microprocesseur commence à refroidir jusqu’à atteindre la température ambiante. Supposons que la constante de refroidissement caractéristique pour ce scénario, qui dépend des propriétés de transfert de chaleur du microprocesseur et de son système de refroidissement, est de 0,07/min. a) Trouver l’équation de la température du microprocesseur. b) Quelle sera la température du microprocesseur dix minutes après l’arrêt de l’appareil? c) Combien de temps faudra-t-il pour que le microprocesseur refroidisse à 35 ◦C?
Afficher/Masquer la solution
Informations données :
- Température ambiante :

- Température initiale du microprocesseur :

- Constante de refroidissement t:

a) En introduisant les valeurs données dans la solution de l’équation de la loi de refroidissement de Newton, l’équation de la section 2.5.1, on obtient la formule pour ") .
.
 = 25 +(75-25)e^(-0,07t)")
b) Pour trouver la température du microprocesseur dix minutes après l’arrêt de l’appareil, il faut introduire  minutes dans .
minutes dans .
 = 25 +(75-25)e^(-0,07(10))")

c) Pour trouver quand la température sera de 35 ◦C, il faut réarranger la formule quand =35^@C") .
.
e^(-0,07t)=35")
=1/5")
/0,07")
 minutes
minutes
Il faut 23 minutes au microprocesseur pour refroidir à 35 ◦C.
La dynamique de la chute d’objets est un exemple classique de la façon dont les équations différentielles modélisent des situations du monde réel. Ce phénomène est directement lié à la deuxième loi du mouvement de Newton, qui stipule que la force agissant sur un objet est égale à la masse de l’objet multipliée par son accélération.

Dans cette équation, la force peut dépendre du temps (), du déplacement ( ) et de la vitesse (
) et de la vitesse ( ). Pour ce qui est des équations du premier ordre, nous considérons généralement des problèmes où
). Pour ce qui est des équations du premier ordre, nous considérons généralement des problèmes où  ne dépend pas de , car l’inclusion conduit souvent à des équations d’ordre supérieur. Étant donné que l’accélération de l’objet (
ne dépend pas de , car l’inclusion conduit souvent à des équations d’ordre supérieur. Étant donné que l’accélération de l’objet ( ) est
) est  , l’équation de la deuxième loi du mouvement de Newton devient
, l’équation de la deuxième loi du mouvement de Newton devient
") .
.
La résolution de cette équation permet d’obtenir en fonction du temps.
Modèle de base
Le modèle le plus simple de chute d’un objet applique la deuxième loi de Newton en considérant la pesanteur comme la seule force agissant sur l’objet. Ici, la force due à la pesanteur est  , ce qui donne l’équation différentielle
, ce qui donne l’équation différentielle
/(dt)=F_g")
où  est l’accélération due à la pesanteur, la masse étant supposée constante. Ce modèle part du principe qu’il n’y a pas de résistance de l’air et que le champ gravitationnel est uniforme. La valeur approximative de est
est l’accélération due à la pesanteur, la masse étant supposée constante. Ce modèle part du principe qu’il n’y a pas de résistance de l’air et que le champ gravitationnel est uniforme. La valeur approximative de est  (unité métrique) ou
(unité métrique) ou  (unité britannique). Le signe de
(unité britannique). Le signe de  change en fonction de la convention de direction que l’on définit pour un problème. Par exemple, si l’on décide que la direction ascendante est positive, puisque la force due à la pesanteur est descendante, l’équation est simplifiée comme suit :
change en fonction de la convention de direction que l’on définit pour un problème. Par exemple, si l’on décide que la direction ascendante est positive, puisque la force due à la pesanteur est descendante, l’équation est simplifiée comme suit :
/(dt)=-g")
Inclusion de la résistance de l’air
En réalité, lorsqu’un objet tombe, il rencontre la résistance de l’air, qui s’oppose au mouvement de l’objet. La force nette exercée sur l’objet devient alors une combinaison de la pesanteur et de la résistance de l’air, ce qui modifie l’équation en
 (2.5.2)
(2.5.2)
où  est la force de la résistance de l’air.
est la force de la résistance de l’air.
La force de la résistance de l’air est souvent proportionnelle à la vitesse de l’objet, de sorte que  , où est une constante de proportionnalité (valeur positive) qui représente le coefficient de la résistance de l’air. Lorsque l’on résout des problèmes impliquant des forces et des mouvements, il est important de veiller à ce que les conventions relatives aux directions positives et négatives soient cohérentes.
, où est une constante de proportionnalité (valeur positive) qui représente le coefficient de la résistance de l’air. Lorsque l’on résout des problèmes impliquant des forces et des mouvements, il est important de veiller à ce que les conventions relatives aux directions positives et négatives soient cohérentes.
Au fur et à mesure que l’objet tombe, la résistance de l’air augmente avec la vitesse jusqu’à ce qu’elle équilibre la force gravitationnelle. À ce point d’équilibre, la force nette est nulle et l’objet n’accélère plus, atteignant une vitesse constante, appelée vitesse limite de chute.
Exemple 2.5.4 Chute d’objet avec résistance de l’air
Prenons un objet ayant une masse de 25 kg et se déplaçant initialement vers le bas à une vitesse de -29 m/s. En chutant, l’objet traverse l’atmosphère, qui exerce une force de résistance à son mouvement. La force de résistance est proportionnelle à la vitesse de l’objet. Plus précisément, lorsque la vitesse de l’objet est de 2 m/s, on sait que la force de résistance est de 20 N. a) Écris l’équation différentielle décrivant le mouvement de l’objet en termes de vitesse et de temps. b) Résous l’équation différentielle pour trouver la vitesse de l’objet en fonction du temps, ") . c) Détermine la vitesse limite de chute de l’objet.
. c) Détermine la vitesse limite de chute de l’objet.
Afficher/Masquer la solution
Informations données
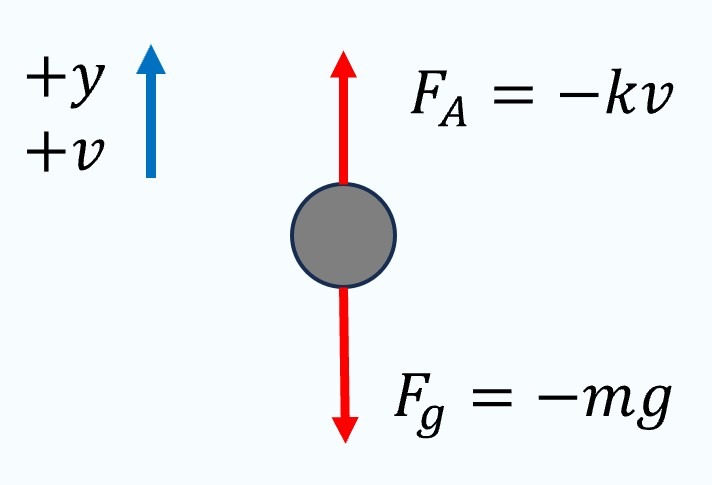
Les deux principales forces agissant sur l’objet sont la pesanteur et la résistance de l’air. La force de pesanteur agit toujours vers le bas, que nous considérons comme une valeur négative dans notre système de coordonnées, et est donnée par  .
.
D’autre part, la résistance de l’air agit dans la direction opposée au mouvement de l’objet, en produisant une force ascendante lorsque l’objet chute. Cette force est représentée par  . Le signe négatif dans garantit que la force de la résistance de l’air est toujours opposée au mouvement : elle est positive (ascendante) lorsque l’objet chute ( est négatif) et négative (descendante) lorsque l’objet se déplace vers le haut ( est positif).
. Le signe négatif dans garantit que la force de la résistance de l’air est toujours opposée au mouvement : elle est positive (ascendante) lorsque l’objet chute ( est négatif) et négative (descendante) lorsque l’objet se déplace vers le haut ( est positif).
En combinant ces forces, l’équation du mouvement est


Nous pouvons utiliser l’information selon laquelle l’ampleur de la résistance de l’air est de  lorsque la vitesse est
lorsque la vitesse est  pour trouver :
pour trouver :



En introduisant les valeurs avec la condition initiale =-29\ \"m/s\"") , on obtient le PVI
, on obtient le PVI
=-29")
b) Il s’agit d’une équation différentielle séparable (et linéaire). La solution générale de l’équation est
=1/2(Ce^(-2/5t)-49)")
En appliquant la condition initiale, on obtient
=1/2(-9e^(-2/5t)-49)")
c) La vitesse limite de chute est
 oo)v(t)=-49/2 \ « m/s » » title= »lim_(x->oo)v(t)=-49/2 \ « m/s » » class= »asciimath mathjax »>
oo)v(t)=-49/2 \ « m/s » » title= »lim_(x->oo)v(t)=-49/2 \ « m/s » » class= »asciimath mathjax »>
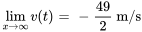
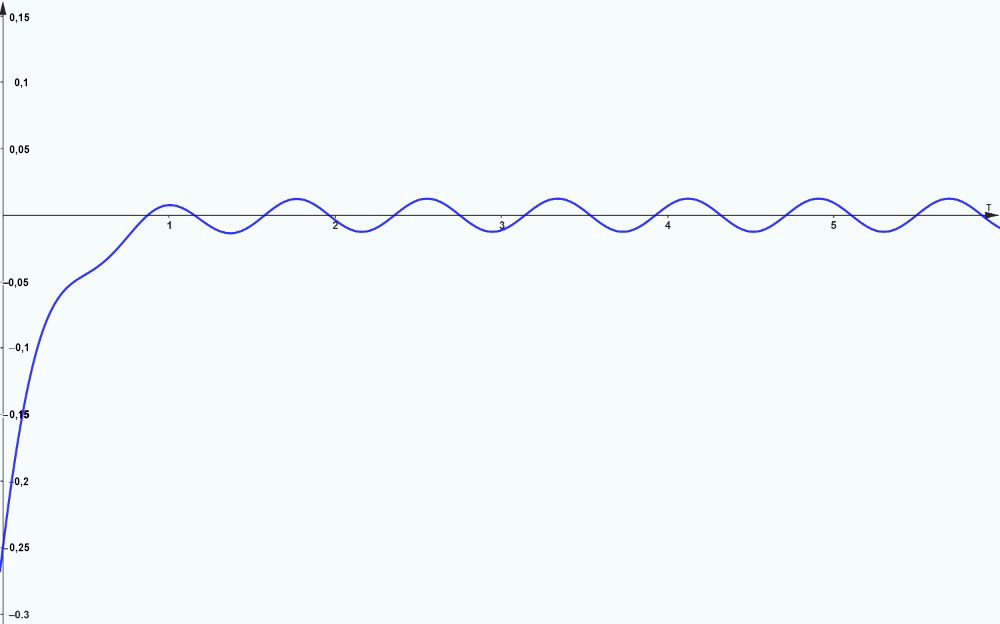
Les circuits électriques font partie intégrante des avancées technologiques et fonctionnent grâce à l’interaction de composants tels que des résistances, des inducteurs et des condensateurs. Dans cette section, nous abordons spécifiquement l’application des équations différentielles du premier ordre pour analyser les circuits électriques composés d’une source de tension avec soit une résistance et un inducteur (RL), soit une résistance et un condensateur (RC), comme illustré à la figure 2.5.1 Les circuits contenant à la fois un inducteur et un condensateur, connus sous le nom de circuits RLC, sont régis par des équations différentielles du second ordre, un sujet sur lequel nous reviendrons dans le chapitre suivant.
(a)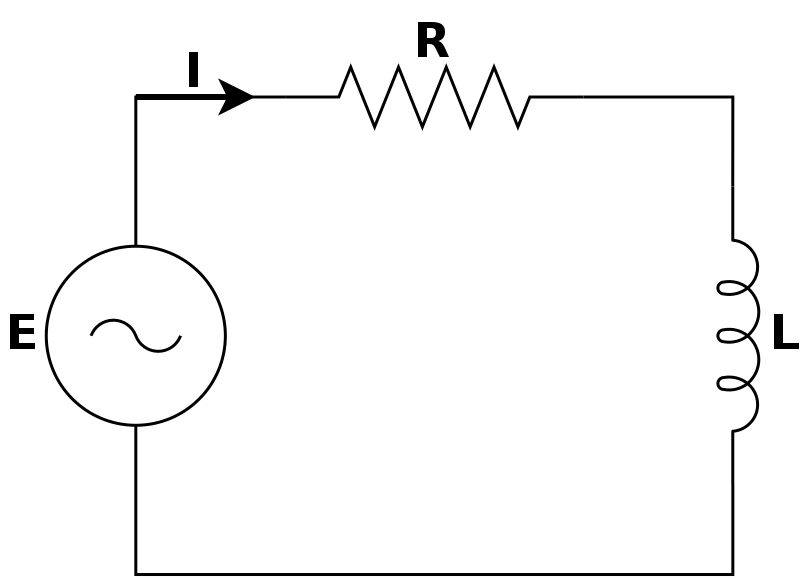 (b)
(b) 
Figure 2.5.1 (a) Circuit série RL et (b) Circuit série RC
Les lois de Kirchhoff – lois des nœuds et loi des mailles – constituent les principes fondamentaux régissant les circuits électriques. La loi des nœuds de Kirchhoff stipule que le courant total entrant en un point (nœud) doit être égal au courant total sortant, ce qui implique que la somme algébrique des courants dans un nœud est nulle. La loi des mailles Kirchhoff stipule que la somme algébrique de toutes les tensions autour d’une boucle fermée d’un circuit (maille) doit être égale à zéro.
La loi des nœuds de Kirchhoff implique que le même courant passe à travers tous les éléments des circuits de la figure 2.5.1. Pour appliquer la loi des mailles de Kirchhoff, il est essentiel de comprendre la baisse de tension à travers chaque composant :
a) Selon la loi d’Ohm, la baisse de tension  aux bornes d’une résistance est proportionnelle au courant I circulant entre ces bornes, ce qui s’exprime par
aux bornes d’une résistance est proportionnelle au courant I circulant entre ces bornes, ce qui s’exprime par  , où
, où  est la résistance.
est la résistance.
b) Selon la loi de Faraday, complétée par la loi de Lenz, la baisse de tension  aux bornes d’un inducteur est proportionnelle au taux de variation du courant, ce qui s’exprime par
aux bornes d’un inducteur est proportionnelle au taux de variation du courant, ce qui s’exprime par /(dt)") , où
, où  est l’inductance.
est l’inductance.
c) La baisse de tension  aux bornes d’un condensateur est proportionnelle à la charge électrique q qui y est stockée, ce qui est représenté par
aux bornes d’un condensateur est proportionnelle à la charge électrique q qui y est stockée, ce qui est représenté par  ,
,  étant la capacité.
étant la capacité.
Modèle de circuit RL
Dans cette section, nous dérivons le modèle mathématique d’un circuit RL tel qu’illustré à la figure 2.5.1, la dérivation du modèle pour un circuit RC étant réservée aux exercices. Considérons que ") est la source de tension du circuit RL. En appliquant la loi des mailles de Kirchhoff, nous avons
est la source de tension du circuit RL. En appliquant la loi des mailles de Kirchhoff, nous avons
")
")
où /dt") est la tension aux bornes de l’inducteur et est la tension aux bornes de la résistance. En substituant ces éléments dans l’équation, on obtient une équation différentielle linéaire du premier ordre
est la tension aux bornes de l’inducteur et est la tension aux bornes de la résistance. En substituant ces éléments dans l’équation, on obtient une équation différentielle linéaire du premier ordre
/dt+RI=E(t)")
ou, dans la forme standard
/dt+R/L I=(E(t))/L")
Pour résoudre cette équation différentielle linéaire, il faut utiliser un facteur intégrant
=e^(int R/L dt)=e^(Rt//L)")
la solution générale pour le courant ") est donc :
est donc :
![I(t)=e^(-Rt//L)[int e^(Rt//L) \ (E(t))/L dt +C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c9c2004d7046726022c4099db379bef9-2.png "I(t)=e^(-Rt//L)[int e^(Rt//L) \ (E(t))/L dt +C]") (2.5.3)
(2.5.3)
Avec un spécifique et une condition initiale, telle que ") , on peut déterminer le courant I(t) avec l’équation ci-dessus. Une fois que est connu, la tension aux bornes de la résistance et de l’inducteur peut être déterminée.
, on peut déterminer le courant I(t) avec l’équation ci-dessus. Une fois que est connu, la tension aux bornes de la résistance et de l’inducteur peut être déterminée.
Exemple 2.5.5 : Circuit série RL
Prenons un circuit série RL avec une résistance de  et un inducteur de
et un inducteur de  , alimenté par une source de tension de
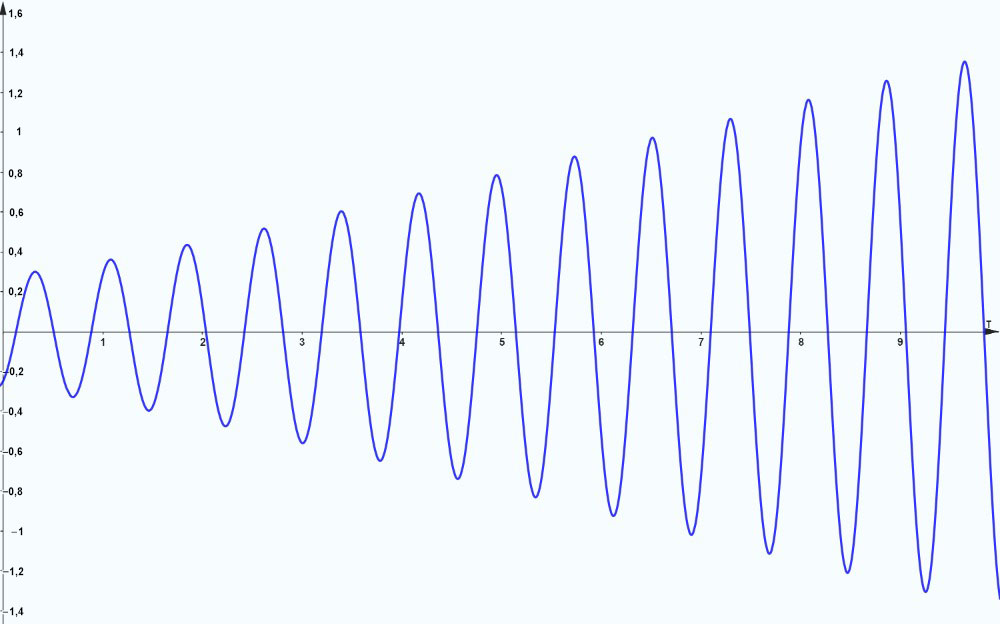
, alimenté par une source de tension de =sin(10t)\ V") . Au départ, le courant aux bornes de la résistance, , est de 0 A. Calcule ce qui suit : a) le courant dans le circuit en fonction du temps, b) la tension aux bornes de l’inducteur en fonction du temps et c) la tension aux bornes de la résistance en fonction du temps.
. Au départ, le courant aux bornes de la résistance, , est de 0 A. Calcule ce qui suit : a) le courant dans le circuit en fonction du temps, b) la tension aux bornes de l’inducteur en fonction du temps et c) la tension aux bornes de la résistance en fonction du temps.
Afficher/Masquer la solution
Informations données :
- Résistance :

- Inducteur :

- Source de tension :
- Condition initiale :
=0 \ A")
a) Trouver le courant
L’équation différentielle pour un circuit série RL selon la loi des mailles de Kirchhoff est
En introduisant les valeurs données, on obtient
/dt+3I=sin(10t)")
Il s’agit d’une équation différentielle linéaire non homogène du premier ordre.
=e^(int 3/0,01 dt)=e^300t")
L’équation de la section 2.5.3 donne la solution de cette équation différentielle.
![I(t)=e^(-300t)[100int e^(300t) \ sin(10t) dt +C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c3eb18471d8917c7a4c4383be9526667-2.png "I(t)=e^(-300t)[100int e^(300t) \ sin(10t) dt +C]")
Le côté droit implique une intégrale avec des termes exponentiels et sinusoïdaux qui est généralement résolue en utilisant l’intégration par parties. Nous ne fournissons que la solution finale de l’intégrale, les étapes détaillées de l’intégration faisant l’objet d’un autre un exercice à explorer plus avant.
![I(t)=e^(-300t)[-10/901e^(300t)cos(10t)+300/901e^(300t)sin(10t)+C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e2b42a7bdcd88459a2f463df564dbf72-2.png "I(t)=e^(-300t)[-10/901e^(300t)cos(10t)+300/901e^(300t)sin(10t)+C]")
Ce qui peut être simplifié en
=-10/901cos(10t)+300/901sin(10t)+Ce^(-300t)")
En appliquant la condition initiale, on obtient
=0")
+300/901sin(0)+Ce^(0) =0")


Le courant est donc
=-10/901cos(10t)+300/901sin(10t)+10/901e^(-300t)")
b) Trouver la tension aux bornes de l’inducteur ")
Pour trouver la tension aux bornes de l’inducteur, il faut d’abord différencier .
/(dt)=100/901sin(10t)+3000/901cos(10t)-3000/901e^(-300t)")
La tension aux bornes de l’inducteur est donc
/dt")
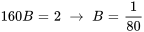
![V_L(t)=0.01[100/901sin(10t)+3000/901cos(10t)-3000/901e^(-300t) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f675842c935345f068e4f9764e8e3140-2.png "V_L(t)=0.01[100/901sin(10t)+3000/901cos(10t)-3000/901e^(-300t) ]")
=1/901sin(10t)+30/901cos(10t)-30/901e^(-300t)")
c) Trouver la tension aux bornes de la résistance ")
De façon similaire, la tension aux bornes de la résistance est obtenue par

![V_R(t)=3[-10/901cos(10t)+300/901sin(10t)+10/901e^(-300t) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/08e66f064b10ed8d859f659eaf6b3f41-2.png "V_R(t)=3[-10/901cos(10t)+300/901sin(10t)+10/901e^(-300t) ]")
=-30/901cos(10t)+900/901sin(10t)+30/901e^(-300t)")
Section 2.5 Exercices


/(dt)=aP")
/dt=-kQ")
/(dt)=-k(T-T_m)")
/(dx^2 )=-g")
/(dt)+RI=E(t)")
/(dt^2 )+RI+1/C I=(dE)/dt")
/(del t) =beta (del^2 u)/(del x^2)")

/dt^2 -2dy/dt + y= -5x")

/(del t)=5(del^2 u)/(del t^2)")
 ,
,")
")
 (d^ny)/dx^n+a_(n-1)(x) (d^(n-1) y)/dx^(n-1)+")
 (dy)/dx+a_0(x)y=f(x)")

")
")


 (dy)/dx+a_0(x)y=0")
/(dx^2 )+3 (dy)/(dx)+2y=0")
/(dx^2 )+3 (dy)/(dx)+2y=xe^x")

 + x^2")


+2x")
 » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »>+2")

+2+4sin(2x)+4x^2")







=y_0")




e")

=2")



")
")
")

")




 p(y)")
")
")
/y^2")
/y^2)=g(x)p(y)")


=1/(p(y))")
dy=g(x)dx")
dy=intg(x)dx")
=G(x) +C")
/y^2")
dx")
dx")

/2+12x+3C_1)^(1//3)")

/2+12x+C_2)^(1//3)")
")
 dy=g(x) dx.")

dy = 6tan^2(2x)dx")
 dy= int 6 tan^2(2 x) dx")
-6x+C_1")
-6x)")
")

=4.")

/(dx)=2x(7y-1)")
")
=2xdx")
 =int2xdx")

")
")
+1)")
=4")
=4")


+1)")
")
/(dx)=(5y^2)/(sqrt(x))")
=1/35.")
")
\ dy=5/(sqrt(x))\ dx")
 \ dx")
+C")
+C)")
=1/35")
+C) =1/35")
 =1/35")


-55)")
 =0″ title= »x>=0″ class= »asciimath mathjax »>
=0″ title= »x>=0″ class= »asciimath mathjax »>-55!=0")

uu(30.25,oo)")
 sqrt(1-y^2)")
=sin(4/3sin(3x)+C)")
 e^(4y)")
=-1/4lnabs(-16/5 e^(5x)+C)")

=3")
=(5 e^(2x^2)+1)/2")
/(dx) = (3 y^2)/sqrt(x), \ \ \ y(4) = 1/42")
=-1/(6 sqrt(x) -54)")
uu(81,oo)")
 y = q(x)")
=0")
")

 y = 2sin(x)")
/x^3 y = (2sin(x))/x^3")
")
")
")

")
")
(vy_1)=q(x)")
y_1)=q(x)")

y_1=0")
")
=int(q(x))/(y_1(x))dx+C")
![y(x)=y_1(x)[int(q(x))/(y_1(x))dx+C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fb6cd40e2b2a9110d9c28b65e4d72851-2.png "y(x)=y_1(x)[int(q(x))/(y_1(x))dx+C]")
")
")
)")
![[int u(x)q(x)dx+C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6ae09153fc3eab62ff6da1e7ea140ae8-2.png "[int u(x)q(x)dx+C]")
y=0")
/y=-p(x)")
=-intp(x) dx")
dx)")
=e^(intp(x)dx)")
 y = q(x)")
=e^(int p(x) dx)")
![y(x)=1/(u(x))[int u(x)q(x)dx+C]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8046d81727e5e2f09dfbda1f4c74cad3-2.png "y(x)=1/(u(x))[int u(x)q(x)dx+C]")
/x^2=xcosx")
 0″ title= »x>0″ class= »asciimath mathjax »>
0″ title= »x>0″ class= »asciimath mathjax »>
=-2/x")
=x^2cosx")
=e^(int p(x)dx)=e^(int -2/x dx)=e^(-2ln|x|)=x^-2")
int x^-2. x^2 cosx dx")

")



+4x^2+4x")
=-6")
*y=4x^2+4x")
=-1/(x+1)")
=4x(x+1)")
=e^(int p(x)dx)=e^(int -1/(x+1) dx)=e^(-ln|x+1|)=(x+1)^-1")
^-1)int (x+1)^-1. 4x(x+1)dx")
int4x dx")
(2x^2 +C)")
(2(1^2)+C)=-6")
=-6")


= (x+1)(2x^2 -5)")
")
y+xsec(x)")
=x^5e^(7x)")
")
=1/2 e^(4x)+Ce^(2x)")

=1/2t^6+C t^(4)")

 = 3")
=1/x^2(1+2x^4)")
+4t^2+4t\ ,")
=7")
=(2t^2+3/2)(t+1)")
")


=c")
 dx + F_y(x,y) dy = 0")

dx+(3x^2 y^2+3xy^2+3x)dy=0")
=")




)_(F_x)dx+underbrace((3x^2 y^2+3xy^2+3x))_(F_y)dy=0")
dx + N(x,y) dy = 0")
 + N(x,y) (dy)/(dx) = 0")
")
")
=c")

/(dx)=0")


=")
")


") sont continues dans une région rectangulaire
sont continues dans une région rectangulaire  . L’équation différentielle
. L’équation différentielledx+N(x,y)dy=0")
/(dely) (x,y)=(delN)/(delx) (x,y)")
/(delx) (x,y)=M")
=int M(x,y)dx+g(y)")
")
")
=C")
/(dely) (x,y)=N")


/(dely) (x,y)=9y^2")

/(delx) (x,y) = 9y^2")

=int3y^3dx+g(y)")
")
")
=9xy^2")
 = 0")
= C")
=0")


")
e^x dx+9y^2(e^x-3)dy = 0,")
=2")
e^x")
/(dely) (x,y)=9y^2e^x")
")
/(delx) (x,y) = 9y^2e^x")
/(dely) = N")
=int9y^2(e^x-3) dy+h(x)")
 + h(x)")
")
")
=(3y^3-1)e^x")
")
")
=")
e^x")
=-e^x")
= -e^x+C_1")
=-e^x")
= 3y^3(e^x-3) -e^x")
 -e^x = C")
(e^0-3) -e^0 = C")
-1=C")

 -e^x = -49")
 = e^x-49")
/(3(e^x-3))")
((e^x-49)/(3(e^x-3)) )")

")
)uu(ln(3),oo)")
(dy)/(dx) = 0") .
.
/(dx) = (-10 e^xcos(y)-3y^2/x)/(-10 e^xsin(y)+6yln(x)+2y^2)") .
.+3y^2ln(x)+2/3y^3=C")
e^x dx+6y^2(e^x+3)dy = 0") ,
, =-2")
/(6(e^x-1/3))")
")
dx+2xydy=0") .
.

 = x")
dx+2x^2ydy=0")

M(x, y)dx + mu(x, y)N(x, y)dy = 0")




/N")
=e^(int (M_y-N_x)/N dx")
/M")
=e^(int (N_x-M_y)/M dy")

dx+(x^2y-x)dy=0")
/N=(1-(2xy-1))/(x^2y-x)=(2(1-xy))/(-x(1-xy))=-2/x")

")
=x^(-2)")
)dx+(y-x^(-1))dy=0")
+(y^2)/2=C")
dx + (x+1)dy = 0")
=e^x")
dx+(x^2y-x)dy = 0")

dx+(-4x^2y+x)dy = 0")

dx+x(sin(y)-ycos(y))dy = 0")
=y/(sin(y)")
/(sin(y))=C")
/(dt)=(rP(t)+5)-(16+7)")


=2,2-11/2400Q(t)")
=480 -469 e^(-11/2400 t)")
 0″ title= »t > 0″ class= »asciimath mathjax »>
0″ title= »t > 0″ class= »asciimath mathjax »>=-30+165 (9/11)^t")
=-21,87^@C")






 = -64-5e^(-5/32*t)")


=e^(4 t) \ V")
=0 A")

=1/(7)(e^(4t)-e^(-3t))")
y' + q(x)y = f(x)")
=0")
y' + q(x)y = 0")
")
")


,y_2(x_0)),(y_1'(x_0),y_2'(x_0))|=")
y'_2(x_0)-y'_1(x_0)y_2(x_0)")
")
 = W(x_0)e^{\int_{x_0}^x p(t) dt}")



")
")
 = -5, \ y'(0) = -32")
 » title= »y_1=e^(6t) -> » class= »asciimath mathjax »>
» title= »y_1=e^(6t) -> » class= »asciimath mathjax »>")
 » title= »y_2 = e^(5t)-> » class= »asciimath mathjax »>
» title= »y_2 = e^(5t)-> » class= »asciimath mathjax »>")
 = |(y_1,y_2),(y_1',y_2')|")
= |(e^(6t),e^(5t) ),(6e^(6t),5e^(5t) ) |")
!=0")
=-e^(11t)")
+c_2e^(5t)")


=-5")
+c_2e^(0)=-5")


+5c_2e^(5t)")
 = -32")
+5c_2e^(0)=-32")

,(6c_1+5c_2=-32 ):}")


+2e^(5t)")
")
")
=2 e^(1/3x)")
!=0")

")
")
 = 2, \ y'(0) = -11")
=3e^t")
=5 e^(-t)-3 e^(2t)")

sin(4t)")
cos(4t)")
 = -5, \ y'(0) = 9")
=-4e^(-10t)")
=-4 e^(-5t)sin(4t)-5 e^(-5t)cos(4t)")

")
(ar^2+br+c)=0")
")



")
")
 + c_2 e^(r_2 x)")
")
")
 + c_2 xe^(r x)")

(cos(betax)+-i sin (betax))")
(c_1cos(betax)+c_2sin (betax))")
")


(r-2)=0")


")
")
=c_1e^(-3x)+c_2e^(2x)")

 = 9, \quad y'(0) = 35")

(r-3)=0")


")
")
=c_1e^(5x)+c_2e^(3x)")
=9")
+c_2e^(0)=9")

+3c_2e^(3x)")
 = 35")
+3c_2e^(0)=35")

,(5c_1+3c_2=35 ):}")


=4e^(5x)+5e^(3x)")


^2=0")

")
")
=c_1e^(4x)+c_2xe^(4x)")

 = 4, \quad y'(0) = -25")

^2=0")

")
")
=c_1e^(-5x)+c_2xe^(-5x)")
+c_2(0)e^(0)=4")

+c_2(e^(-5x)-5xe^(-5x))")
 = -25")
+c_2(e^(0)-0)=-25")


=4e^(-5x)-5xe^(-5x)")


)/2=")
)/2=2+-3i")


=e^(2x)(c_1 cos(3x)+c_2 sin(3x))")

 = -3, \quad y'(0) = -7")



^2=-25")




=e^(-x)(c_1 cos(5x)+c_2 sin(5x))")
=-3")
(c_1 cos(0)+c_2 sin(0))=-3")

=-e^(-x)(c_1 cos(5x)+c_2 sin(5x))+")
(-5c_1 sin(5x)+5c_2 cos(5x))")
 = -7")


=e^(-x)(-3 cos(5x)-2 sin(5x))")

 = 4, \quad y'(0) = -8.5")
=e^(-4x)+3 e^(-1.5x)")

 = -1, \quad y'(0) = 8")
=-e^(-2x)+6xe^(-2x)")

 = 4, \quad y'(0) = -18")
=e^(-5x)(4cos(x)+2sin(x))")
y'+q(x)y=f(x)")
")
y'+q(x)y=0")






")
yprime+q(x)y=f_1(x)")
")
yprime+q(x)y=f_2(x)")


+k_2y_(p2)")
yprime+q(x)y=k_1f_1(x)+k_2f_2(x)")
=3x/2-9/4")

=e^(3x)/2")
")
")
=3x")
=10e^(3x)")
=12x-20e^(3x)")
=4f_1(x)-2f_2(x)")
=4y_(p1)-2y_(p2)")
/2-9/4)-2(e^(3x)/2)")
")
=1/3 e^(-5 x)")
")
 = -5/8x+15/32")

+10x")
+5/4x-15/16")
=-2/15 e^(3x)")
")
 = 1/20sin(2x)-1/40cos(2x)")
")
+4sin(2x)")
-1/5sin(2x)+1/10cos(2x)")
")
 avec des coefficients indéterminés. Cette supposition est ensuite remplacée dans l’équation pour trouver la valeur de ces coefficients. Cette méthode est utile lorsque la fonction de forçage,
avec des coefficients indéterminés. Cette supposition est ensuite remplacée dans l’équation pour trouver la valeur de ces coefficients. Cette méthode est utile lorsque la fonction de forçage, 


")
")
")
")
= (3x-2)e^(4x)")
e^(4x)")
xe^(4x)")
x^2e^(4x)")

/(dx^2) + 10(dy)/(dx) +25y = 3e^(-2 x)")
,xe^(-5x)}")
")
")
")
 - 20Ae^(-2x) +25Ae^(-2x) = 3e^(-2 x)")
e^(-2x)=3e^(-2x)")
=3e^(-2x)")


")
+c_1e^(-5x)+c_2xe^(-5x)")
/(dx^2) + 10(dy)/(dx) +25y = e^(-5 x)")
+c_2xe^(-5x)")
")

")
 (2x-5x^2)")
(2x-5x^2)+Ae^(-5x)(2-10x)")
(25x^2-20x+2)")
(25x^2-20x+2)+")
 (2x-5x^2)+")
=e^(-5x)")
(25x^2-20x+2+20x-50x^2+25x^2)=e^(-5x)")
(2)=e^(-5x)")


")
+c_1e^(-5x)+c_2xe^(-5x)")
/(dx^2) + 10(dy)/(dx) +25y = e^(-5 x),")
=2,\ y'(0)=-3")
=2")

-5/2x^2e^(-5x)-5c_1e^(-5x)+c_2(e^(-5x)-5xe^(-5x))")
=-3")
=-3")


+2e^(-5x)+7xe^(-5x)")
")
")
x^(n-1)+...+A_1x+A_0")
")
")
")
+Bsin(betax)")
")
+bsin(betax)")

")
")
")
 cos(8x)")
")
e^(2x)")

+Bsin(4x)")
cos(pix)+(B_2x^2+B_1x+B_0)sin(pix)")
((A_1x+A_0)cos(8x)+(B_1x+B_0)sin(8x))")

")
")
")

")
(A_2x^2+A_1x+A_0)")
")
")
/(dt^2) + 2(dy)/(dt) + 17y = 5e^(-4 t)")
=c_1e^(- t)cos(4t)+c_2 e^(- t)sin(4t)+ 1/5e^(-4t)")
")
-1/75cos(10x)")
,\ \ y(0) = 1,\ y'(0) = -17")
=3 e^(-2x)-2 e^(5x)-xe^(-2x)")

 = 4,\ y'(0) = 1")
=-3e^(-3t)-3e^(2t)-2t+10")
")
")
")









)_(=0) + u_2 underbrace((ay_2''+by_2'+cy_2 ))_(=0) +")
 = f(x)")
)/a")
,(u_1'y_1'+ u_2'y_2' = (f(x))/a ):}")


 y_2)/(a(y_1 y_2'- y_1' y_2))")
 y_1)/(a(y_1 y_2' - y_1' y_2))")

 y_2)/(a W(y_1,y_2))")
 y_1)/(a W(y_1,y_2))")
 y_2)/(a W(y_1,y_2)) dx")
 y_1)/(a W(y_1,y_2)) dx")
arctan(x)")


^2=0")
")
 = |(y_1,y_2),(y_1',y_2')|")
= |(e^(-3x),xe^(-3x) ),(-3e^(-3x),e^(-3x)(1-3x )) |")
(1-3x)+3xe^(-6x)")
")
=e^(-3x)arctan(x)")
=e^(-6x)")
arctan(x) (xe^(-3x)))/(e^(-6x)) dx")
 dx")
+1/2int(x^2)/(1+x^2)dx")
 +1/2(x-arctan(x))+C")
arctan(x) (e^(-3x)))/(e^(-6x)) dx")
 dx")
-intx/(1+x^2)dx")
 -1/2ln(1+x^2)+C")
 +1/2(x-arctan(x)) )e^(-3x)+")
 -1/2ln(1+x^2))xe^(-3x)")
(x^2arctan(x)+x-arctan(x)-xln(1+x^2))")
")


(r+2)=0")


")
")
=1/(e^x+1)")
=-e^(-3x)")
 e^(-2x))/(-e^(-3x)) dx")
 dx")
+C")
 e^(-x))/(-e^(-3x)) dx")
/(1+e^x) dx")
-e^x+C")
e^(-x)+(ln(1+e^x)-e^x )e^(-2x)")
+e^(-2x))ln(1+e^x)-e^(-x)")
=c_1y_1+c_2y_2+y_p")
+c_2e^(-2x)+")
+e^(-2x))ln(1+e^x)-e^(-x)")
")
")
e^(-x)")

=c_3e^(-x)+c_2e^(-2x)")
+e^(-2x))ln(1+e^x)")
y''+a_1(x)y'+a_0(x)y=g(x)")
, \ a_1(x),\ a_0(x)")
")


")
y'+q(x)y=f(x),")
=Y_0, \ y'(x_o)=Y_1")


 y_2)/(W(y_1,y_2)) dx")
 y_1)/(W(y_1,y_2)) dx")
 = x^2")
 = x^-1")
")
, \ \(xgt0)")
= |(x^2,x^-1 ),(2x,-x^-2) |")



=x^-1(1+3x^2)")
=-3")
 y_2)/( W(y_1,y_2)) dx")
 x^-1)/-3 dx")
 dx")
+C")


 x^2)/-3 dx")
 dx")
+C")

x^2+(-1/6x^2-1/4x^4 )x^-1")

lnx")
=2x^2 e^(4x)ln(x)-3x^2 e^(4x)")
")
=cos(x)ln|cos(x)|+xsin(x)")
")
=-3/2x-1/5x^4")



u'' + q_1(x)u' = f(x)")
")
=e^(-int p(x)dx)")
)/((y_1)^2) \ dx")
=c_1y_1+c_2y_2")

 = e^(2 x)")
y'+(4x+8)y = 0, \quad x gt 0")
/xy'+(4x+8)/xy = 0")
 » title= »p(x)=-(4(x+1))/x \ -> » class= »asciimath mathjax »>
» title= »p(x)=-(4(x+1))/x \ -> » class= »asciimath mathjax »>=e^(-int p(x)dx)=e^(4int (x+1)/xdx)")
)=x^4e^(4x)")
)/((y_1)^2) dx")
 int (x^4e^(4x))/((e^(2x))^2) dx")
 int x^4 dx")
+C")
")
 = x")
=2,\ y'(1)=-3")

 » title= »p(x)=x^-1 \ -> » class= »asciimath mathjax »>
» title= »p(x)=x^-1 \ -> » class= »asciimath mathjax »>=e^(-int p(x)dx)=e^(-int x^-1dx)")
)=x^-1")
/(x^2) dx")

^0")

")

")

= |(x,x^-1 ),(1,-x^-2) |")

=x^-2(x^2+1)")
=-2x^-1")
 x^-1)/(-2x^-1) dx")
dx")
dx")
")
 x)/(-2x^-1) dx")
dx")
")
 x-1/2(x^3/3+x) x^-1")

=1/3x^2-1+c_1x+c_2x^-1")
-1+c_1(1)+c_2(1^-1)=2")


=2/3x+c_1-c_2x^-2")
=-3")
+c_1-c_2(1^-2) =-3")

,(c_1-c_2=-11/3 ):}")


=1/3x^2-1-1/2x+19/6x^-1")
 = e^(4 x)")
y'+(16x+4)y = 0, \quad x gt 0")
")

+c_1x+c_2/x")
 = 3 , \ y'(-1) = -3")
)")
")


")
=0")


")
x^(r-2)")
x^r+brx^r+cx^r=0")
 » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »> +br+c)=0")
+br+c=0")
r+c=0")


")
")
 + c_2 x^(r_2)")




 cos(beta lnx)")
 sin(beta lnx)")
(c_1cos(beta lnx) +c_2sin (betalnx))")

=-4,\ y'(1)=-1")





=c_1 x^4 + c_2x^4lnx")


=-4")
^4+c_2(1)^4ln(1)=-4")

=-1")
^3+4c_2(1)^3ln(1)+c_2(1)^3=-1")

=-4x^4+15x^4lnx")

=c_1x^4+c_2x")

=1,\ y'(1)=2")
=9/2x^-5-7/2x^-7")
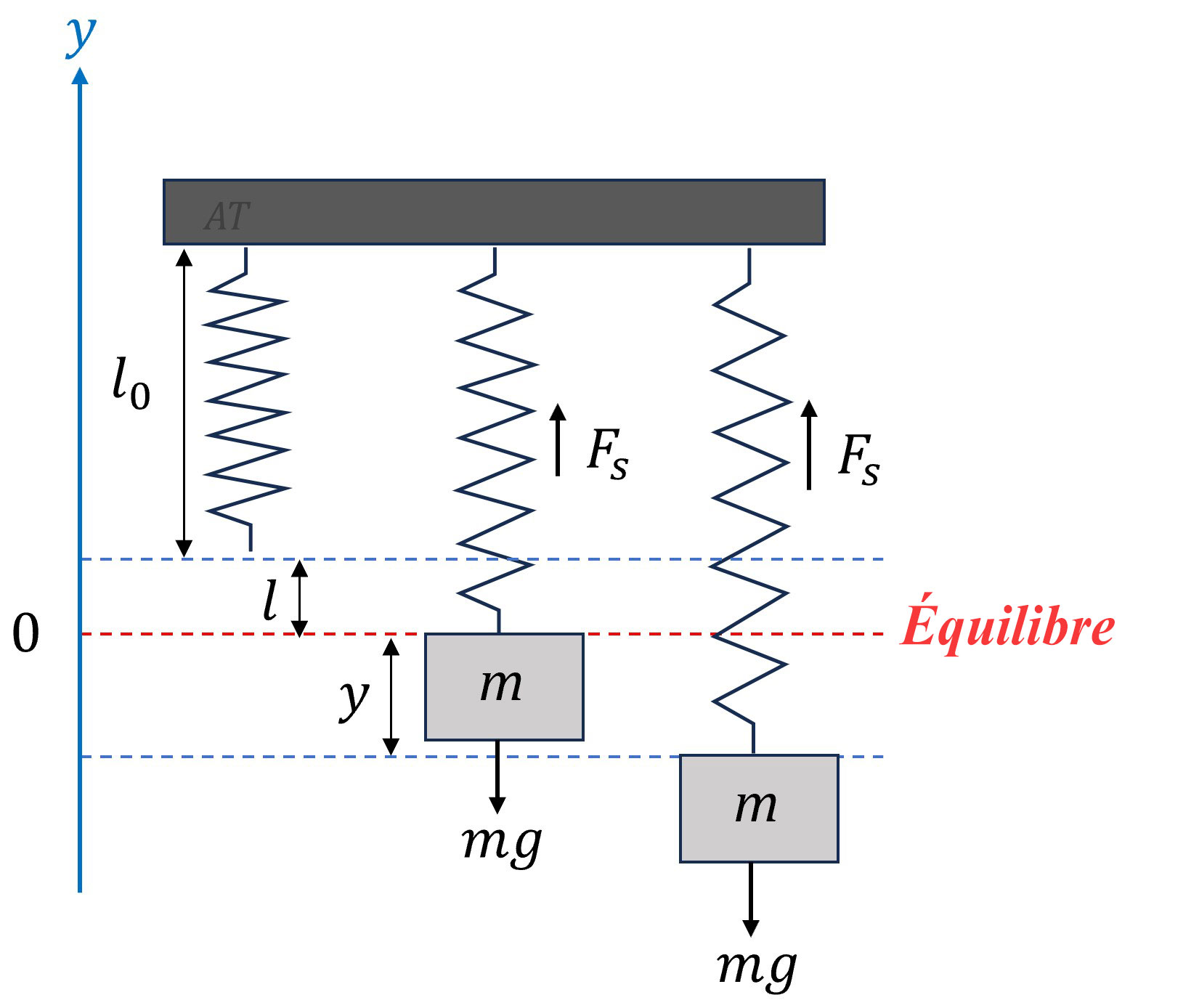
 , qui représente l’objet en mouvement. Un ressort au coefficient de rigidité
, qui représente l’objet en mouvement. Un ressort au coefficient de rigidité  0″ title= »k>0″ class= »asciimath mathjax »>
0″ title= »k>0″ class= »asciimath mathjax »>")




")



")
-cy'+F(t)")
")




")


=y_0")
=y'_0")
=0")
=0")
ne0")
ne0")

=0")


")
")

=c_1cos(omega_0t)+c_2sin(omega_0t)")
=Rcos(omega_0t-phi)")

")


,")
=c_1/R=c_1/(sqrt(c_1^2+c_2^2))")
=c_2/R=c_2/(sqrt(c_1^2+c_2^2))")
/(omega_0)")



")




 = R cos(omega_0 t - phi)")




=-3 \ \"cm\"")
=20\ \"cm\"//\"s\"")

 \ k/m=g/(l) » title= »mg=k(l) ->\ k/m=g/(l) » class= »asciimath mathjax »>
\ k/m=g/(l) » title= »mg=k(l) ->\ k/m=g/(l) » class= »asciimath mathjax »>
=392,000\ \"dyne/cm\"")
 =sqrt(196)=14")

=-3,")
=20")
=c_1cos(14t)+c_2sin(14t)")
=-3")
+c_2sin(0)=-3")

=-14c_1sin(14t)+14c_2cos(14t)")
+14c_2cos(0)=20")


=-3cos(14t)+10/7sin(14t)")

/(omega_0)=pi/7 \ \"s\"")
^2+(10/7)^2)=1/7sqrt(541)")
")
/-3|)~~0.444 \ \"rad\"")

lt0")

gt0")

 = 1/7sqrt(541) cos(14 t - 2.697)")


 avec la formule quadratique, on trouve les racines
avec la formule quadratique, on trouve les racines=(-c+-sqrt(c^2-4mk))/(2m)")


")
=c_1e^(-c/(2m)t)+c_2te^(-c/(2m)t)")

")
")
")
=2sqrt(mk)")

")

=c_1e^(r_1t)+c_2e^(r_2t)")

")

=-c/(2m)+-(sqrt(4mk-c^2))/(2m)i=-c/(2m)+-omega_1i")
=e^(-c/(2m)t)(c_1cos(omega_1t)+c_2sin(omega_1t))")
)/(2m)")
=Re^(-c/(2m)t)cos(omega_1t-phi)")
=(c_1)/R")
=(c_2)/R")
")
t)")
")



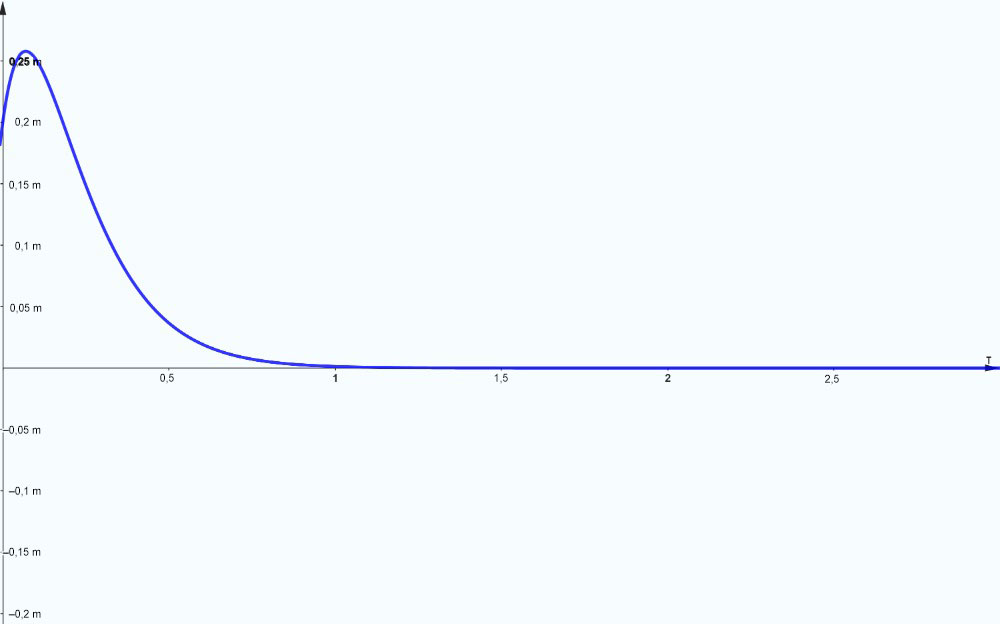
=20 \ \"cm\"=")

=2\ \"m\"//\"s\"")

=0,2,")
=2")
=2sqrt(1(64))=16")
=16")
=c_1e^(-8t)+c_2te^(-8)")
=0,2")
+0=0,2")

=-8c_1e^(-8t)+c_2e^(-8t)(1-8t)")
+c_2e^0(1)=2")
+c_2=2")

=0,2e^(-8t)+3,6te^(-8t)")


=16")
 c_(cr)=16″ title= »c>c_(cr)=16″ class= »asciimath mathjax »>
c_(cr)=16″ title= »c>c_(cr)=16″ class= »asciimath mathjax »>=(-34+-sqrt(34^2-4(1)(64)))/(2(1))")


=c_1e^(-2t)+c_2e^(-32t)")
+c_2e^0=0,2")

=-2c_1e^(-2t)-32c_2e^(-32t)")
-32c_2e^0=2")


=0,28e^(-2t)-0,08e^(-32t)")
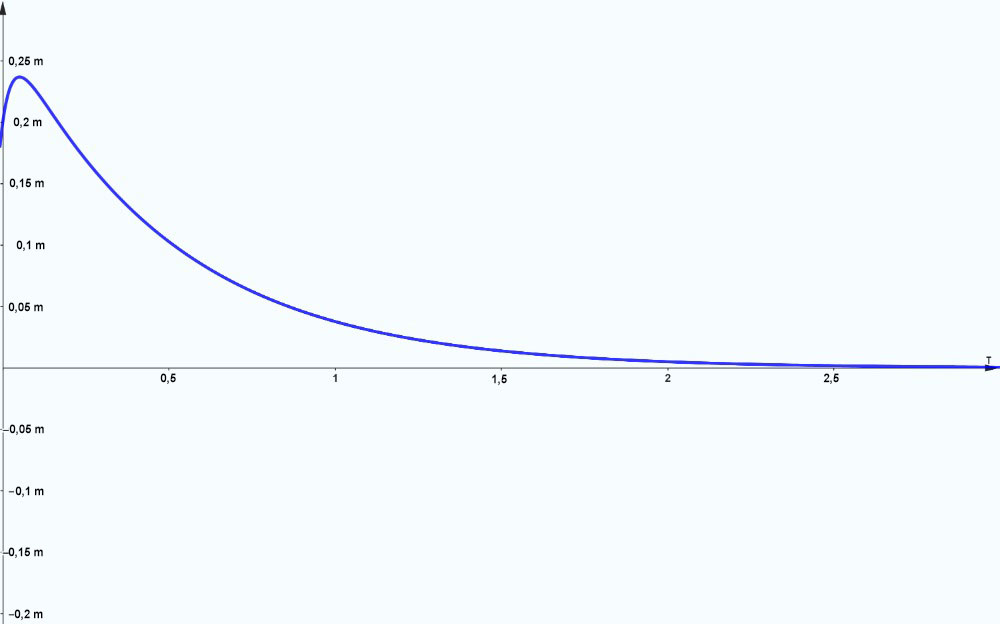


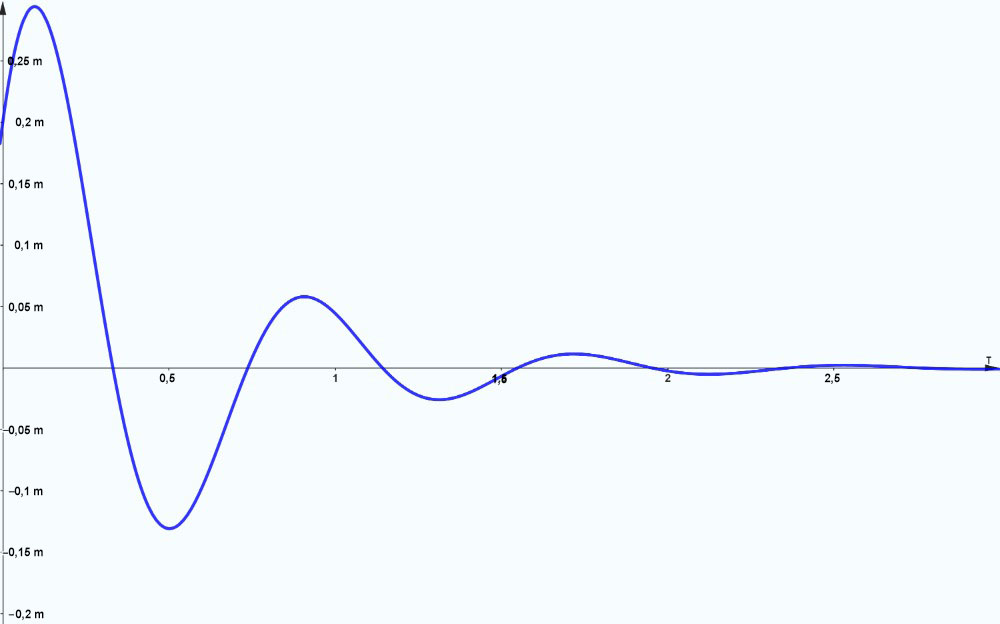
=16")
=-4/(2(1))+-(sqrt(4(1)(64)-4^2))/(2(1))i=-2+-2sqrt(15)i")
=e^(-2t)(c_1cos(2sqrt(15)t)+c_2sin(2sqrt(15)t))")
(c_1cos(0)+c_2sin(0))=0,2")
=e^(-2t)(-2c_1cos(2sqrt(15)t)-2c_2sin(2sqrt(15)t)-")
 c_1sin(2sqrt(15)t)+2sqrt(15) c_2cos(2sqrt(15)t))")
c_2=2")
+2sqrt(15)c_2=2")
)/25")
=e^(-2t)(0,2cos(2sqrt(15)t)+(2sqrt(15))/25 sin(2sqrt(15)t))")
=sqrt(85)/25e^(-2t)cos(2sqrt(15)t-0,9976)")
=F_0 cos(omega t)")
=F_0 sin(omega t)")
")
=y_p (t)+y_c (t)")
")
")

=c_1cos(omega_0t)+c_2sin(omega_0t)")

=Acos(omegat)+Bsin(omegat).")
)cos(omega t),")
=F_0/(m(omega_0^2-omega^2))cos(omega t)+")
+c_2sin(omega_0t)")

=t(Acos(omegat)+Bsin(omegat))")
t sin(omega_0 t)")
=F_0/(2m omega_0)t sin(omega_0 t)+")

 = 2cos(8t)") et subit une résonance. Au départ, l’objet est déplacé de 3 pouces au-dessous de la position d’équilibre et reçoit une vitesse ascendante de 1 pied par seconde (ft/s). Déterminer le déplacement de l’objet dans ces conditions.
et subit une résonance. Au départ, l’objet est déplacé de 3 pouces au-dessous de la position d’équilibre et reçoit une vitesse ascendante de 1 pied par seconde (ft/s). Déterminer le déplacement de l’objet dans ces conditions.

 = 2 cos(8t)")
=-3\ \"in\"=")

=1\ \"ft\"//\"s\"")


 \ k=(mg)/( l) » title= »mg=k( l) ->\ k=(mg)/( l) » class= »asciimath mathjax »>
\ k=(mg)/( l) » title= »mg=k( l) ->\ k=(mg)/( l) » class= »asciimath mathjax »>
 =sqrt(64)=8")


,")
=-0.25,")
=1")
=2/(2(1)(8))t sin(8 t)+c_1cos(8t)+c_2sin(8t)")
=1/8t sin(8 t)+c_1cos(8t)+c_2sin(8t)")
 » title= »y_0(0)=-0,25 \ -> » class= »asciimath mathjax »>
» title= »y_0(0)=-0,25 \ -> » class= »asciimath mathjax »>
 » title= »y’_0(0)=1\ -> » class= »asciimath mathjax »>
» title= »y’_0(0)=1\ -> » class= »asciimath mathjax »>
=1/8t sin(8 t)-1/4cos(8t)+1/8sin(8t)")
=1/8tsin(8t)+sqrt(5)/8cos(8t-2.6779)")
")

,")


=c_1e^(-4t)+c_2e^(-16t)")
+Bsin(8t)")
+8Bcos(8t)")
-64Bsin(8t)")

-64Bsin(8t)+20(-8Asin(8t)+8Bcos(8t))")
+Bsin(8t))=2cos(8t)")
-160Asin(8t)=2cos(8t)")
 \ B=1/80″ title= »160B=2\ ->\ B=1/80″ class= »asciimath mathjax »>
\ B=1/80″ title= »160B=2\ ->\ B=1/80″ class= »asciimath mathjax »> \ A=0″ title= »-160A=0\ ->\ A=0″ class= »asciimath mathjax »>
\ A=0″ title= »-160A=0\ ->\ A=0″ class= »asciimath mathjax »>")
=1/80sin(8t)+")
+c_2e^(-16t)")



=1/80sin(8t)-")
+1/120e^(-16t)")
/(dt^2) + ky = 0")






 = c_1 cos(omega t) + c_2 sin(omega t)")

=1/10cos(7sqrt(6)t)+2/(7sqrt(6))sin(7sqrt(6)t)")


 .
.
 0″ title= »t > 0″ class= »asciimath mathjax »>
0″ title= »t > 0″ class= »asciimath mathjax »>=e^(-9/26t)(5cos(sqrt(387)/(26)t)+45/sqrt(387)sin(sqrt(387)/(26)t))")


 .
. 



=-0,1 e^(-2t)+3,8te^(-2t)")



/(dt)")


 qui y est stockée, représentée par
qui y est stockée, représentée par

")
")
/dt")
/dt+RI+1/Cq=E(t)")
/dt")
/(dt^2)+R (dI)/dt+1/CI=(dE)/dt")
")
/(dt^2)+R(dq)/(dt)+1/Cq=E(t)")
")
")
")



=0.1sin(10t)\ \"V\"")



=0 \ \"A\"")
=I'(0)=0 \ C")
/(dt^2)+0,06 (dI)/dt+89/50I=cos(10t),")
=0, \ I'(0)=0")
/(dt^2)+6 (dI)/dt+178I=100cos(10t),")
=-3+-13i")
=e^(-3t)(c_1cos(13t)+c_2sin(13t))")
+Bsin(10t)")
+10Bcos(10t)")
-100Bsin(10t)")

-100Bsin(10t) +6(-10Asin(10t)+10Bcos(10t) )")
+Bsin(10t))=")
")
cos(10t)+(-60A+78B)sin(10t)=100cos(10t)")



+500/807sin(10t)")
=650/807cos(10t)+500/807sin(10t) +")
(c_1cos(13t)+c_2sin(13t))")
 » title= »I_0(0)=0 \ -> » class= »asciimath mathjax »>
» title= »I_0(0)=0 \ -> » class= »asciimath mathjax »>
 » title= »I’_0(0)=0\ -> » class= »asciimath mathjax »>
» title= »I’_0(0)=0\ -> » class= »asciimath mathjax »>
(-650/807 cos(13t)-6950/10491 sin(13t))")



 = 0,06sin(3t)V")

")
=0,0205 e^(-31t)-0,1071 e^(-3t)+")
+0,08660cos(3t)")
=0,34(0,0205 e^(-31t)-0,1071 e^(-3t)+")
+0,08660cos(3t) )")


 = 0,09t^2\ V")

=e^(-t)(9/3721cos(11t)-540/40931sin(11t))+9/61t-9/3721")
+5y(t)=f(t),")
=10")
-10+5Y(s)")
")
")
")



=int_0^ooe^(-st)f(t)dt")

harrF(s)")
f(t)dt")
=2")
=1")
=int_0^ooe^(-st)(2)dt")
")

 0″ title=
0″ title=
=2/s")

=C")

=e^(at)")
=int_0^ooe^(-st)(e^(at))dt")

=1/(s-a)")
harr1/(s-a)")
=")




/s^(n+1)")
")
")
,")
/(s-a)^(n+1)")
")
")
")
")
sin(bt)")
^2+b^2)")
cos(bt)")
/((s-a)^2+b^2)")
")
")

")
")
=sin(2t)")
=cos(5t)")
}")
")

}")
")

}")
")

}")
")
 = e^(4t) , quad t gt 0")
=1/(s-4)")
 = cos(4t) , quad t gt 0")
=s/(s^2+4^2)")
=6 cosh(2 t)")

=(6s)/(s^2-2^2)")



 =t_0″ title= »t>=t_0″ class= »asciimath mathjax »>
=t_0″ title= »t>=t_0″ class= »asciimath mathjax »>=e^(7t)cos(4t)")
=e^(t^3)")


 s_0″ title= »s>s_0″ class= »asciimath mathjax »>
s_0″ title= »s>s_0″ class= »asciimath mathjax »>
-6cos(4t)+9t^2}")
}")
)=")
")
 -3″ title= »s> -3″ class= »asciimath mathjax »>
-3″ title= »s> -3″ class= »asciimath mathjax »>}")
=s/(s^2+16)")

/(s^(2+1))=2/(s^3)")
-6cos(4t)+9t^2 }=")
}-6\mathcal{L} {cos(4t)}+9\mathcal{L} { t^2}")
)-")
 )+9(2/(s^3) )")
-")
/(s^2+16)+18/(s^3)")
= \mathcal{L}{f(t)}")

f(t)}=F(s-a)")
sin(7t)+8t^3 e^(-6t)}") .
.sin(7t)}")
=sin(7t)")

=\mathcal{L}{sin(7t)}")
")

sin(7t)}=F(s-9)")
^2+7^2)")
 9″ title= »s>9″ class= »asciimath mathjax »>
9″ title= »s>9″ class= »asciimath mathjax »>)}")
=t^3")

=\mathcal{L}{t^3}")
/(s^(3+1))=(3!)/(s^4)")
.")
)}=F(s+6)")
^4)")
 -6″ title= »s> -6″ class= »asciimath mathjax »>
-6″ title= »s> -6″ class= »asciimath mathjax »>sin(7t)}")
}")
^2+49))")
^4)")
^2+49)")
^4")

} = sF(s) - f(0)")
\} = s^2F(s) - s f(0) - f'(0)")

}(t)\} =")
 - s^{n-1}f(0) - \cdots - f^{(n-1)}(0)")
=sin(3t)")
=3cos(3t)")
=sin(0)=0")
}=s/(s^2+3^2)")
}=3/(s^2+3^2)")
 } = s \mathcal{L}{sin(3t) } - sin(0)")
)=s(3/(s^2+3^2))-0")
/(s^2+3^2)=(3s)/(s^2+3^2")
=-3")
=1")


-y(0)")



}")

}")
")




")
f}(s)")
")
sin(5t) }")
^2+5^2)")

")

-f'(0)")
}")
^n (d^n)/(ds^n)(\mathcal{L}{f})")
}")
^1 (d)/(ds)(\mathcal{L}{sin(7t)})")
(7/(s^2+7^2))")
/(s^2+49)^2")
=-3t^5+9sin(t), \ t gt 0")
=-360/s^(6)+9/(s^2+1),\ sgt0")
=")
sin(t), \ t gt 0")
=10/((s - 1)^2+1),\ sgt1")
=4")
=-2")




{c_1F_1+c_2F_2}=c_1\mathcal{L}^(-1){F_1}+c_2\mathcal{L}^(-1){F_2}")
{5/(s+7)+(8s)/ (s^2+16)}") .
.\ harr\ 1/(s+7)")
\ harr\ s/(s^2+4^2)")
{1/(s+7)}")
{s/ (s^2+16)}")
+8cos(4t)")
=(P(s))/(Q(s))")
")
")

")


^2+16")
^2+4^2")
 sin(bt)")

^2+4^2))")
 }")
^2+4^2)}")
 \ sin(4t)")
/((s-2)^2(s+1))")


+B/(s-2)^2+C/(s+1)")
^2(s+1)")
(s+1)+B(s+1)+C(s-2)^2")

-5=A(2-2)(2+1)+B(2+1)+C(2-2)^2")



^2-(-1)-5=A(-1-2)(-1+1)-(-1+1)+C(-1-2)^2")



(1)-(1)-1/3(-2)^2")



/((s-2)^2(s+1)) }")
)-1/(s-2)^2-1/3(1/(s+1))}")
}-\mathcal{L}^-1{1/(s-2)^2}")
}")
")
")

-t e^(2t)-1/3e^(-t)")
=(-s-6)/(s^2+49),\ s gt 0")
=-cos(7t)-6/7sin(7t)")
 = (-7s-2)/(s^2+s-2).")
=-4 e^(-2t)-3 e^(t)")
 = \mathcal{L}{y}")
 = 16/((s-7)^2+16)+(-5s)/(s^2+9)+8/(s^2+16)")
=\mathcal{L}^-1{Y(s)}")
=4 e^(7t)sin(4t)-5cos(3t)+2sin(4t)")
")

=as^2+bs+c")
")
=\mathcal{L}{f(t)}")
=(F(s)+a(y'(0)+sy(0))+b y(0) )/(p(s))")
\ ;")
=-1, \ y'(0)=2")
}")
=\mathcal{L}^-1{y}")
-sy(0)-y'(0)-5(sY(s)-y(0))+6Y(s)=4(1/(s+2))")
+s-2-5(sY(s)+1)+6Y(s)=4(1/(s+2))")
Y(s)=4/(s+2)-s+7")
-s+7)/(s^2-5s+6)")
")
=(-s^2+5s+18)/((s+2)(s-3)(s-2))")
=1/5 (1/(s+2))+24/5 (1/(s-3))-6 (1/(s-2))")
 +24/5 e^(3t)-6 e^(2t)")
 \ ;")
=1, \ y'(0)=-1")
=s^2+4")
=\mathcal{L}^-1{3sin(t)}")
")
=(3//(s^2+1)+(-1+s(1)))/(s^2+4)")
+s-1)/(s^2+4)")
")
=(s^3-s^2+s+2)/((s^2+1)(s^2+4))")
=1/(s^2+1)+(s-2)/(s^2+4)")
+s/(s^2+4)- 2/(s^2+4)")
\ harr\ b/(s^2+b^2)")
\ harr\ s/(s^2+b^2)")
+cos(2t)-sin(2t)")
 = -1, \ quad y'(0) = 2")
=-3/7 e^(2t)-4/7 e^(-5t)")
 = 2, \ quad y'(0) = 0")
=e^(-3t)(2cos(2t)+3sin(2t))")
 = 1, \ quad y'(0) = -1")
=e^(4t)(1-5t)")
")
 = {(0,t lt 0),(1,t ge 0):}")
 = {(0,t-a lt 0),(1,t-a ge 0):}")
=u(t-a) = {(0,t lt a ),(1,t ge a ):}")

 = {(0,t lt a ),(M,t ge a ):}")
 = {(1,t lt a ),(0,t ge a ):}")
 = {(f_0(t), \ 0 le t lt a),(f_1(t), t ge a):}")
{(1, \ 0 le t lt a),(0, t ge a):}")
{(0, \ 0 le t lt a),(1, t ge a):}")
(1-u(t-a))+f_1(t)u(t-a)")
= f_0(t) + u(t-a)(f_1(t)-f_0(t))")
 = {(f_0(t), \ 0 le t lt a),(f_1(t), a le t lt b), (f_2(t), t ge b) :}")
(f_2(t)-f_1(t))")
")

}")

g(t)}=e^(-as)\mathcal{L}{g(t+a)}")
3t^2")
=3t^2")

=3(t+1)^2")

}")





3t^2}=e^(-s)(6/s^3+6/s^2+3/s )")
 = {(2t-1, \ \ 0 le t lt 2),(4t, t ge 2):}")
=2t-1")
=4t")
= 2t-1+ u(t-2)(4t-2t+1)")
(2t+1)")
}=\mathcal{L}{2t-1}")
(2t+1) }")
=2t+1")
=2(t+2)+1")

\mathcal{L}{g(t+2)}")

 \mathcal{L}{2t+5 }")
(2/s^2+5/s)")
")
")
g(t-a)}=e^(-as)\mathcal{L}{g(t)}")
=\mathcal{L}{g(t)}")
g(t-a)")

 G(s)")
")
=2/s-s/(s^2+1)+e^(-pi/2 s)((s-1)/(s^2+1))")
")
")
=2/s-s/(s^2+1)")
=(s-1)/(s^2+1)")
=\mathcal{L}^-1{2/s-s/(s^2+1) }")
")
=\mathcal{L}^-1{s/(s^2+1) -1/(s^2+1) }")
-sin(t)")


=")
}")
H_1(s)}")
")
(h_1(t-pi/2))")
(cos(t-pi/2)-sin(t-pi/2))")
=sin(t)")
=-cos(t)")
=2-cos(t)")
(sin(t)+cos(t))")
")
")
+cos(t)")

=2-cos(t)")
")
+cos(t)")
 )=sin(t)+cos(t)")
=sin(t)+2")
 = {(2-cos(t), \ \ 0 le t lt pi/2),(sin(t)+2, t ge pi/2):}")
 = {(0,\"si\",t lt 3),(2 (t-3),\"si\",3 le t lt 7),(8,\"si\",t gt 7):}.")
=(2 e^(-3s))/s^2-(2 e^(-7s))/s^2")
")
")
=e^(-2s)/(s^2+4s+8)")
=1/2sin(2(t-2))e^(-2(t-2))u_2(t)")
 u_2(t) - 4 (t-3) u_3(t), \quad y(0) = y'(0) = 0")
=(4 e^(-2s)-4 e^(-3s))/(s^2(s^2+9))")
\;")
=k_0, \ \ y'(0)=k_1")

,")
=0,")
=4")
=u(t-2)")


}")
=\mathcal{L}{y}")
}=e^(-2s)\mathcal{L}{t+2}")
-sy(0)-y'(0)-3(sY(s)-y(0))-10Y(s)=5/s-3e^(-2s)(1/s^2+2/s)")
-4-3sY(s)-10Y(s)=5/s-3e^(-2s)(1/s^2+2/s)")
Y(s)=5/s-3e^(-2s)(1/s^2+2/s)+4")
=5/(s(s^2-3s-10) )-(3e^(-2s))/(s^2(s^2-3s-10) ) -(6e^(-2s))/(s(s^2-3s-10) )+4/(s^2-3s-10)")
=1/(s^2-3s-10 )(4)+ 1/(s(s^2-3s-10) )(5-6e^(-2s)) +")
 )(-3e^(-2s) )")
=1/((s+2)(s-5) )(4) +1/(s(s+2)(s-5) )(5-6e^(-2s))+")
(s-5) )(-3e^(-2s))")
=4F(s)+(5-6e^(-2s))G(s)+(-3e^(-2s)) H(s)")
=1/((s+2)(s-5) )")
)+1/7(1/(s-5))")
=1/(s(s+2)(s-5) )")
+1/14(1/(s+2))+1/35(1/(s-5))")
=1/(s^2(s+2)(s-5) )")
-1/10(1/s^2) -1/28(1/(s+2))+1/175(1/(s-5))")
")
=\mathcal{L}^-1{F(s)}")
+1/7e^(5t)")
=\mathcal{L}^-1{G(s)}")
+1/35e^(5t)")
=\mathcal{L}^-1{H(s)}")
/10-1/28e^(-2t)+1/175e^(5t)")
=4F(s)+5G(s)-3e^(-2s)(2G(s)+H(s))")
=\mathcal{L}^-1{Y(s)} =")
} +5\mathcal{L}^-1{G(s)}")
(2G(s)+H(s)) }")
+5g(t)-3u(t-2)(2g(t-2)+h(t-2))")
+1/7e^(5t))")
+1/35e^(5t))-")
![3u_2(t)[2(-1/10+1/14e^(-2(t-2))+1/35e^(5(t-2)))+(3/100-(t-2)/10-1/28e^(-2(t-2))+1/175e^(5(t-2)))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/596f76ddc59a249d749de6abf59be83f.png "3u_2(t)[2(-1/10+1/14e^(-2(t-2))+1/35e^(5(t-2)))+(3/100-(t-2)/10-1/28e^(-2(t-2))+1/175e^(5(t-2)))]")

+9I(t)")
,(-1 \ \ \ 1lttlt2) ,(0 \ \ \ \ \ \ \ \ \ 2ltt):}")
=0,")
=0")
= 1 + u(t-1)(-1-1)")
(0-(-1))")
+u(t-2)")


+u(t-2)}")
=\mathcal{L}{I}")
+9J(s)=1/s-(2e^-s)/s+e^(-2s)/s")
")
=1/(s(s^2+9))-(2e^-s)/(s(s^2+9))+e^(-2s)/(s(s^2+9))")
=\mathcal{L}^-1{J(s)}")
=G(s)-2e^-sG(s)+e^(-2s)G(s)")
=1/(s(s^2+9))")
-1/9(s/(s^2+9))")
")
}")
}")
G(s)}")
-2g(t-1)u(t-1)+g(t-2)u(t-2)")
)")
))u(t-1)")
))u(t-2)")
-1\ quad\ \ \ 0lttlt1),(1+cos(3t)-2cos(3t-3) \ \ \ 1lttlt2) ,(cos(3t)-2cos(3t-3)+cos(3t-6) \ \ tgt2):}")

,(0,t ge 3 or t lt 2):}\ ,")
 = y'(0) = 0")
=3/26(1-e^(-5(t-2))cos(t-2)-5 e^(-5(t-2))sin(t-2))")
,(0,t ge 6):}, \quad\ y(0) = y'(0) = 0")
 = f(t) - g(t) u_6(t)")
=1/6+1/3 e^(3t)-1/2 e^(2t)")
=1/6+1/3 e^(3(t-6))-1/2 e^(2(t-6))")
,(0,t ge 9):}, \quad \ y(0) = y'(0) = 0")
 = f(t) - g(t) u_9(t)")
=1/2+1/2 e^(2t)-e^(t)")
=1/2+1/2 e^(2(t-9))-e^((t-9))")
")
\ ;")
")
={(0 \ si\ t!=0),(oo \ si \ t=0):}")
 = 1")
 delta(t) = f(0)")
")

={(0 \si \ t!=a),(oo \si \ t=a):}")
 delta(t-a) = f(a)")
}=e^(-as)")
,")
=1,")
=0")

-s+16Y(s)=4e^(-pis)")
=(4e^(-pis) +s)/(s^2+16)")
 4/(s^2+16)+s/(s^2+16)")
=u(t-pi) sin(4(t-pi))")
")



, \quad \ y(0) = y'(0) = 0.")
 + delta(t-7), \quad \ y(0) = 11,\ y'(0) = 32")

=0")
=I'(0)=0")
/(s^2+10^2)")
}=J(s)")
-sI(0)-I'(0)=s^2J(s)")
-sI(0)=sJ(s)")
")
+6sJ(s)+178J(s)=(100s)/(s^2+10^2)")
=(100s)/((s^2+10^2)(s^2+6s+178))")
=1/807((650s+5000)/(s^2+10^2))-")
/(s^2+6s+178))")
=650/807(s/(s^2+10^2))+5000/807(1/(s^2+10^2)) -")
^2+13^2)) -")
^2+13^2))")
=650/807cos(10t)+500/807sin(10t)+")
(-650/807cos(13t)-6950/10491sin(13t))")
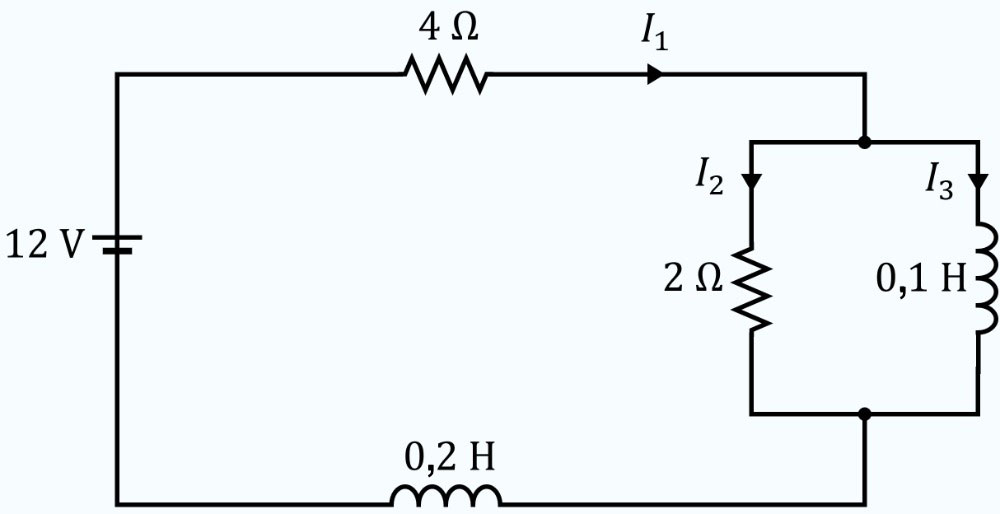




/dt")
/dt+0,2(dI_1)/dt=12")
/dt-2I_2=0")

,(0,1I'_3-2I_2=0), (I_1-I_2-I_3=0) :}")

=I_2(0)=I_3(0)=0")
,(0.1\mathcal{L}{I'_3}-2\mathcal{L}{I_2}=0), (\mathcal{L}{I_1}-\mathcal{L}{I_2}-\mathcal{L}{I_3}=0) :}")
")
")
")
-I_1(0)")
")
-I_3(0)")
")
+0,1sJ_3(s)+0,2sJ_1(s)=12/s),(0.1sJ_3(s)-2J_2(s)=0), (J_1(s)-J_2(s)-J_3(s)=0) :}")
")
=J_1(s)-J_3(s)")
+0,1sJ_3(s)+0,2sJ_1(s)=12/s),(0,1sJ_3(s)-2(J_1(s)-J_3(s))=0) :}")
J_1(s)+0,1sJ_3(s)=12/s),(-2J_1(s)+(0,1s+2)J_3(s)=0) :}")
")
") et
et
(4+0,2s)J_1(s)+0,2sJ_1(s)")
12/s")
") , on obtient
, on obtient=(1,2+24/s)/(0,02s^2+s+8)")
 .
.=(60s+1200)/(s^3+50s^2+400s)")
/(s(s^2+50s+400))")
/(s(s+10)(s+40))")
=3/s-2/(s+10)-1/(s+40)")
=(2J_1(s))/(0,1s+2)")
/(s(s+10)(s+40)(0,1s+2))")
)/(s(s+10)(s+40)(0,1s+2))")
=1200/(s(s+10)(s+40))")
=3/s-4/(s+10)+1/(s+40)")
=J_1(s)-J_3(s)=2/(s+10)-2/(s+40)")
 ,
,  , et
, et  , on détermine le courant dans les branches du circuit.
, on détermine le courant dans les branches du circuit.} =I_1(t)")
-e^(-40t)")
} =I_2(t)")
-2e^(-40t)")
} =I_3(t)")
+e^(-40t)")
")
/(2s^(3//2))")
")
/(s^2+b^2)^2")
")
/(s^2+b^2)^2")

=u(t-a)")
/s")
f(t-a)")
 F(s)")

f(t)")
")
")
^kF^((k))(s)")
dx")
)/s")
g(x)dx")
.G(s)")

^oo\ a_n(x-x_0)^n")




+")
^2+ a_3(x-x_0)^3+ ...")
 +somme_(n=2)^oo\ a_n(x-x_0)^n")

^oo\ a_nx^n")


^oo\ a_(n-k)x^(n-k)")

^oo\ a_(n+k)x^(n+k)")

=somme_(n=0)^oo\ a_n(x-x_0)^n")
=somme_(n=0)^oo\ b_n(x-x_0)^n")
+c_2g(x)=somme_(n=0)^oo\ (c_1a_n+c_2b_n)(x-x_0)^n")


^n")
^c somme_(n=0)^oo\ a_n(x-x_0)^n")
^oo\ a_n(x-x_0)^(n+c)")
^n")
^2 somme_(n=3)^oo na_n (x+2)^(n-4)-somme_(n=1)^oo na_n (x+2)^(n+1)")
^2")
^oo na_n (x+2)^(n-4+2)-somme_(n=1)^oo na_n (x+2)^(n+1)")
^oo na_n (x+2)^(n-2)-somme_(n=1)^oo na_n (x+2)^(n+1)")
")
^oo (n+2)a_(n+2) (x+2)^(n+2-2)-somme_(n=1+1)^oo (n-1)a_(n-1) (x+2)^(n-1+1)")
^oo (n+2)a_(n+2) (x+2)^(n)-somme_(n=2)^oo (n-1)a_(n-1) (x+2)^(n)")
 , le terme initial sera nul en raison du facteur
, le terme initial sera nul en raison du facteur ") . Par conséquent, le fait de faire commencer l’indice à
. Par conséquent, le fait de faire commencer l’indice à ^oo (n+2)a_(n+2) (x+2)^(n)-somme_(n=1)^oo (n-1)a_(n-1) (x+2)^(n)")
![=somme_(n=1)^oo [(n+2)a_(n+2)-(n-1)a_(n-1)] (x+2)^(n)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/73afff9b9536860c6906d1b4b066784c-1.png "=somme_(n=1)^oo [(n+2)a_(n+2)-(n-1)a_(n-1)] (x+2)^(n)")
") , le terme à
, le terme à  (où a est l’indice de départ) sera nul.
(où a est l’indice de départ) sera nul. oo)somme_(n=0)^Na_n (x-x_0 )^n » title= »lim_(N->oo)somme_(n=0)^Na_n (x-x_0 )^n » class= »asciimath mathjax »>
oo)somme_(n=0)^Na_n (x-x_0 )^n » title= »lim_(N->oo)somme_(n=0)^Na_n (x-x_0 )^n » class= »asciimath mathjax »>




")
 oo)|(a_n+1)/(a_n)|=L » title= »lim_(n->oo)|(a_n+1)/(a_n)|=L » class= »asciimath mathjax »>
oo)|(a_n+1)/(a_n)|=L » title= »lim_(n->oo)|(a_n+1)/(a_n)|=L » class= »asciimath mathjax »>

")
=somme_(n=1)^oo\ a_nd/(dx) (x-x_0)^n")
^oo\ na_n(x-x_0)^(n-1)")
=somme_(n=1)^oo\ na_nd/dx(x-x_0)^(n-1)")
^oo\ n(n-1)a_n(x-x_0)^(n-2)")


^oo\ a_nx^n")

y''+2xy'-2y")


^oo\ a_nx^n")
^oo\ n a_n x^(n-1)")
^oo\ n a_nx^(n-1)")
^oo\ n(n-1) a_n x^(n-2)")

somme_(n=2)^oo\ n(n-1) a_n x^(n-2)")
^oo\ n a_n x^(n-1)")
^oo\ a_nx^n")
^oo\ n(n-1) a_n x^(n-2)")
^oo\ n(n-1) a_n x^n")
^oo\ n a_n x^n")
^oo\ (n+2)(n+1) a_(n+2) x^n")



^oo\ n(n-1) a_n x^n")
^oo\ n a_n x^n")
![somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fa7cf6625d240b2ee223644bdddd5e5e.png "somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n")
^oo\ a_n(x-x_0)^n=somme_(n=0)^oo\ b_n(x-x_0)^n")

^oo\ a_n(x-x_0)^n=0")

=somme_(n=0)^oo\ f^(n)(x_0)/(n!)(x-x_0)^n")
(x_0)")



^oo\ x^n/(n!)=")
+x^3/(3!)+...")
=somme_(n=n_0)^oo\(-1)^n x^(2n+1)/((2n+1)!)=")
+x^5/(5!)- ...")
=somme_(n=n_0)^oo\(-1)^n x^(2n)/((2n)!)=")
+x^4/(4!)- ...")
,a_(n-2),...a_(n-k))")
 k » title= »n>k » class= »asciimath mathjax »>
k » title= »n>k » class= »asciimath mathjax »>
 = -a_n/((n+1)(n+4))")

 \ a_(0+2)=-a_0/((0+1)(0+4))\ ->\ a_2=-a_0/4″ title= »n=0\ ->\ a_(0+2)=-a_0/((0+1)(0+4))\ ->\ a_2=-a_0/4″ class= »asciimath mathjax »>
\ a_(0+2)=-a_0/((0+1)(0+4))\ ->\ a_2=-a_0/4″ title= »n=0\ ->\ a_(0+2)=-a_0/((0+1)(0+4))\ ->\ a_2=-a_0/4″ class= »asciimath mathjax »> \ a_(1+2)=-a_1/((1+1)(1+4))\ ->\ a_3=-a_1/10″ title= »n=1\ ->\ a_(1+2)=-a_1/((1+1)(1+4))\ ->\ a_3=-a_1/10″ class= »asciimath mathjax »>
\ a_(1+2)=-a_1/((1+1)(1+4))\ ->\ a_3=-a_1/10″ title= »n=1\ ->\ a_(1+2)=-a_1/((1+1)(1+4))\ ->\ a_3=-a_1/10″ class= »asciimath mathjax »> \ a_(2+2)=-a_2/((2+1)(2+4))\ ->\ a_4=-a_2/18″ title= »n=2\ ->\ a_(2+2)=-a_2/((2+1)(2+4))\ ->\ a_4=-a_2/18″ class= »asciimath mathjax »>
\ a_(2+2)=-a_2/((2+1)(2+4))\ ->\ a_4=-a_2/18″ title= »n=2\ ->\ a_(2+2)=-a_2/((2+1)(2+4))\ ->\ a_4=-a_2/18″ class= »asciimath mathjax »>

=a_0/72")
^oo \ n (n-1) a_n x^(n-2)")
^oo\ -2n a_n x^(n-1)")
^oo\ -3a_n x^n")
![somme_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-2n a_n-3a_n]x^n](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2af78124383a3768d20ba4c25718b5ae.png "somme_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-2n a_n-3a_n]x^n")

![somme_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-5n a_n+2a_n]x^n](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/873f2c00e85f34e40f64b0e4b50274b2.png "somme_(n=0)^(oo)[(n+2)(n+1)a_(n+2)-5n a_n+2a_n]x^n")
 = -a_n/((n+1)(n+2))")


y''+P_1(x)y'+P_2(x)y=0")


")
)/(P_0(x) )y'+(P_2(x))/(P_0(x) ) y=0")


=0")
!=0")

!=0")
=somme_(n=0)^oo\ a_n(x-x_0)^n")

")

=1")
^oo\ a_nx^n=0")



^oo\ (k+2)(k+1) a_(k+2) x^(k)")
^oo\ a_kx^k=0")
![somme_(k=0)^oo\ [(k+2)(k+1) a_(k+2)+a_k] x^(k) =0](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1da7da7308d332963030da00af07ae55.png "somme_(k=0)^oo\ [(k+2)(k+1) a_(k+2)+a_k] x^(k) =0")
(k+1) a_(k+2)+a_k=0")
=(-a_k)/((k+2)(k+1) ),")



/((2)(1) )")

/((3)(2) )")

/((4)(3) )")
/((4)(3)(2)(1) )")

/((5)(4) )")
/((5)(4)(3)(2) )")

/((6)(5) )")
/((6)(5)(4)(3)(2)(1) )")

/((7)(6) )")
/((7)(6)(5)(4)(3)(2) )")


=((-1)^ma_0)/((2m)!")

=((-1)^ma_1)/((2m+1)!")
^oo\ a_(2m)x^(2m)")
^oo\ a_(2m+1)x^(2m+1)")
^oo\ (-1)^m x^(2m) /((2m)!")
^oo\ (-1)^mx^(2m+1) /((2m+1)!")
")
")
=somme_(m=0)^oo\ (-1)^m x^(2m) /((2m)!")
=somme_(m=0)^oo\ (-1)^mx^(2m+1) /((2m+1)!")
+a_1sin(x)")
")
 oo » title= »m->oo » class= »asciimath mathjax »>
oo » title= »m->oo » class= »asciimath mathjax »>
y''+2xy'-2y=0")
=1+x^2")
^oo\ a_nx^n=0")
![somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n=0](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1e33a81a0ec721cff0c0719147f7d574.png "somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n(n-1)+2n-2)a_n] x^n=0")
![somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n^2+n-2)a_n] x^n=0](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f64159e969f5ec9cafcc8b2df42505d4.png "somme_(n=0)^oo\ [(n+2)(n+1) a_(n+2)+(n^2+n-2)a_n] x^n=0")
(n+1) a_(n+2)+(n^2+n-2) a_n=0")
=-(n^2+n-2) /((n+2)(n+1) )a_n")
(n-1)) /((n+2)(n+1) )a_n")
=-(n-1) /(n+1)a_n")











 >
>





=(-1)^(m+1)1/(2m-1)a_0")

=a_1")

+1) +somme_(m=1)^oo\ a_(2m)x^(2m)")
^oo\(-1)^(m+1)x^(2m)/(2m-1)")
y''+2xy'-2y=0,")
=2,\ y'(0)=3")
=2")
=3")




![a_0[(-1)^(1+1)x^(2(1))/(2(1)-1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c3f0acc4c7fb6134827403b64e5949de.png "a_0[(-1)^(1+1)x^(2(1))/(2(1)-1)]")



![a_4=a_0[(-1)^(2+1)x^(2(2))/(2(2)-1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bfc45a5d9c306b6cec9135c47d626d99.png "a_4=a_0[(-1)^(2+1)x^(2(2))/(2(2)-1)]")


![a_6=a_0[(-1)^(3+1)x^(2(3))/(2(3)-1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/086651c115e9cc96d60c02073f6cda13.png "a_6=a_0[(-1)^(3+1)x^(2(3))/(2(3)-1)]")



![a_8=a_0[(-1)^(4+1)x^(2(4))/(2(4)-1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7b31549a8d2fe7870cf6339200666995.png "a_8=a_0[(-1)^(4+1)x^(2(4))/(2(4)-1)]")
=2+3x+2x^2-2/3x^4+2/5x^6-2/7x^8+...")
y''+(1-3x)y'-y=0,")
=3,\ y'(0)=2")


=4,\ y'(0)=3")

y''+(1-4x)y'+(2+5x)y=0,")
=1,\ y'(0)=2")



")



![A = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]_(mxxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3822e77582622e2a9cc1b0410f5e36f0.png "A = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]_(mxxn)")
![x = [[a_11, a_12,...,a_(1n)]]_(1xxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4480d0fc4b53f65d7de498d2142ed5bc.png "x = [[a_11, a_12,...,a_(1n)]]_(1xxn)")
![y = [[a_11],[a_(21)], [vdots] ,[a_(m1)] ]_(mxx1)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c1001cc07bc48628ec706ab468252ace.png "y = [[a_11],[a_(21)], [vdots] ,[a_(m1)] ]_(mxx1)")

![B = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]_(nxxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1d85735e5cdddfab5b5cb2943c199c3c.png "B = [[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]_(nxxn)")

![C = [[a_11, 0 ,..., 0],[0,a_22, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., a_(n\n)] ]_(nxxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b36d57e1a007fe4a5ffa0effc526c9fa.png "C = [[a_11, 0 ,..., 0],[0,a_22, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., a_(n\n)] ]_(nxxn)")


![I_n = [[1, 0 ,..., 0],[0,1, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 1] ]_(nxxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/15d61a62fbbd3f4322ec761967d6e172.png "I_n = [[1, 0 ,..., 0],[0,1, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 1] ]_(nxxn)")
")
![0_(mxxn) = [[0, 0 ,..., 0],[0,0, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 0] ]_(mxxn)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/288678af2fe03c972feeae61b6de0482.png "0_(mxxn) = [[0, 0 ,..., 0],[0,0, ..., 0], [vdots, vdots,ddots, vdots] ,[0, 0 , ..., 0] ]_(mxxn)")
![A=[a_(ij)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b8cb22330fb905bae2aedbf4683f0257.png "A=[a_(ij)]")
![B=[b_(ij)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/03f09e9a20341c9c81fc89ffa3850a2d.png "B=[b_(ij)]")

=a_(ij)+b_(ij)")

+C=A+(B+C)")

")
=kA+kB")
=(kl)A")




![A=[[-1,3],[0,7]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6ad7c9fc8cd8eabfd44ec2f209c32d00.png "A=[[-1,3],[0,7]]")
![B=[[2,-4],[-2,5]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c4d2306d307472b645c49dea09d3af59.png "B=[[2,-4],[-2,5]]")
![C=3[[-1,3],[0,7]] -[[2,-4],[-2,5]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0d6525bcc19b4e212d1dc5fbe34bcec9.png "C=3[[-1,3],[0,7]] -[[2,-4],[-2,5]]")
![=[[-3,9],[0,21]] -[[2,-4],[-2,5]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d84924f8b0a514e3aa946ebebf3c2125.png "=[[-3,9],[0,21]] -[[2,-4],[-2,5]]")
![=[[-3-2,9-(-4)],[0-(-2),21-5]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c8ece06490ea59f699b040b5313fb524.png "=[[-3-2,9-(-4)],[0-(-2),21-5]]")
![C=[[-5,13],[2,16]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/df4ec4e38d075d0184517ea24d641215.png "C=[[-5,13],[2,16]]")
")
")
")


C = A(BC)")
 = AB + AC")




![A=[[1,4,-1],[2,0,-5]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/55cd6152712bd70d58b73411a0f470e6.png "A=[[1,4,-1],[2,0,-5]]")
![B=[[-7,3,-1,0],[-5,1,4,3],[0,-2,1,2]].](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1379ee328e4b92fdb9e21e1922295c17.png "B=[[-7,3,-1,0],[-5,1,4,3],[0,-2,1,2]].")



(-7)+(4)(-5)+(-1)(0)=-27")
(3)+(4)(1)+(-1)(-2)=9")
(-1)+(4)(4)+(-1)(1)=14")
(0)+(4)(3)+(-1)(2)=10")
(-7)+(0)(-5)+(-5)(0)=-14")
(3)+(0)(1)+(-5)(-2)=16")
(-1)+(0)(4)+(-5)(1)=-7")
(0)+(0)(3)+(-5)(2)=-10")
![C=[[-27,9,14,10],[-14,16,-7,-10]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dd7e421ae0a982124c0588891df0ecd1.png "C=[[-27,9,14,10],[-14,16,-7,-10]]")
=|A|")

![|[a_11,a_12],[a_21,a_22]|=a_11a_22-a_21a_12](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/059bb8efcaa1352ddcb141d23f141548.png "|[a_11,a_12],[a_21,a_22]|=a_11a_22-a_21a_12")

![|[a_11,a_12,a_13],[a_21,a_22,a_23] ,[a_31,a_32,a_33] |=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d1d2577b861992088ee3fe65b7ef1eec.png "|[a_11,a_12,a_13],[a_21,a_22,a_23] ,[a_31,a_32,a_33] |=")
![a_11|[a_22,a_23],[a_32,a_33]|-](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/544a2b797fe7ffbd5ec378f9d7aa74c6.png "a_11|[a_22,a_23],[a_32,a_33]|-")
![a_12|[a_21,a_23],[a_31,a_33]|+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6f19b481453b02652e1ed57c1a6c09b8.png "a_12|[a_21,a_23],[a_31,a_33]|+")
![a_13|[a_21,a_22],[a_31,a_32]|](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/053e38ea50ac7f1572e2347f7f06def1.png "a_13|[a_21,a_22],[a_31,a_32]|")
![A=[[-5,-1],[3,2]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5790881d5a00dcbef515818dc5174f7a.png "A=[[-5,-1],[3,2]]")
![B= [[2,4,7],[5,-3,8],[0,-1,3] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/86ba0dfd1c8ed0cf775c07c07b11a00a.png "B= [[2,4,7],[5,-3,8],[0,-1,3] ]")

![|[-5,-1],[3,2]|=(-5)(2)-(3)(-1)=-7](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2a47204968c0b6afa32c304d114d7357.png "|[-5,-1],[3,2]|=(-5)(2)-(3)(-1)=-7")
![|B|=|[2,4,7],[5,-3,8] ,[0,-1,3] |=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/88f3bc20d396330811bd6d46a116d0c9.png "|B|=|[2,4,7],[5,-3,8] ,[0,-1,3] |=")
![2|[-3,8],[-1,3]|-](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/79d712b0d3e15837647e4212743c9080.png "2|[-3,8],[-1,3]|-")
![4|[5,8],[0,3]|+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/027a886f0c149a2b807840a695185439.png "4|[5,8],[0,3]|+")
![7|[5,-3],[0,-1]|](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bde87f849885fb920e0102553729e0e3.png "7|[5,-3],[0,-1]|")
(3)-(-1)(8))-4((5)(3)-(0)(8))+")
(-1)-(0)(-3))")
-4(15)+7(-5)")

")

} \text{adj}(A)")
")
![A=[[a_11,a_12],[a_21,a_22]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4274fe78ca6d9f4f0b322cb4aa087d8c.png "A=[[a_11,a_12],[a_21,a_22]]")
![A^-1=1/(det(A))[[a_22,-a_12],[-a_21,a_11]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/db2c539a1405333a0d7c3939a1452ec4.png "A^-1=1/(det(A))[[a_22,-a_12],[-a_21,a_11]]")
![[A|I]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d26ef42e744ddaa445ef88eb14213f01.png "[A|I]")

![[I|A^-1]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9dbdc823b69c59a2bac71a8f5989ac82.png "[I|A^-1]")
![A=[[4,6],[2,6]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d07df574ab2124b662937e948d40407c.png "A=[[4,6],[2,6]]")
(6)-(2)(6)=12")
![A^-1=1/12[[6,-6],[-2,4]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dae4f24454ec630f863c76f36956acd6.png "A^-1=1/12[[6,-6],[-2,4]]")
![=[[1/2,-1/2],[-1/6,1/3]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/23eeda67ce4b2c52a979adaa70133307.png "=[[1/2,-1/2],[-1/6,1/3]]")
![A=[[1,0,3],[-3,1,-9],[0,2,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a709ecf8b6a83a38d2af880b64c7545d.png "A=[[1,0,3],[-3,1,-9],[0,2,1]]")

![[A|I]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5325401372ea5b72aaeada54f6f3af71.png "[A|I]=")
![[[1,0,3,|,1,0,0],[-3,1,-9,|,0,1,0],[0,2,1,|,0,0,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/121cf3902cd2a141cd37069f9b42c53a.png "[[1,0,3,|,1,0,0],[-3,1,-9,|,0,1,0],[0,2,1,|,0,0,1]]")

![[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,2,1,|,0,0,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d9d337066d566087f4de0d0ed85ba0e6.png "[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,2,1,|,0,0,1]]")

![[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5463455d45da23534d698a502a4a1a0e.png "[[1,0,3,|,1,0,0],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]")

![[[1,0,0,|,19,6,-3],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/49d0a39903e06da7c7fad95903465b31.png "[[1,0,0,|,19,6,-3],[0,1,0,|,3,1,0],[0,0,1,|,-6,-2,1]]")
![A^-1=[[19,6,-3],[3,1,0],[-6,-2,1]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/de9d9d2d34e1628b4b981e8efbcf57aa.png "A^-1=[[19,6,-3],[3,1,0],[-6,-2,1]]")
")

![A(t) = [[a_11(t), a_12(t) ,..., a_(1n)(t)],[a_21(t),a_22(t), ..., a_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a_(m1)(t), a_(m2)(t) , ..., a_(mn)(t) ] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6e1e8cd5a20fd4abfc96f87adc5a1e39.png "A(t) = [[a_11(t), a_12(t) ,..., a_(1n)(t)],[a_21(t),a_22(t), ..., a_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a_(m1)(t), a_(m2)(t) , ..., a_(mn)(t) ] ]")
")
/(dt)")
![A'(t) = [[a'_11(t), a'_12(t) ,..., a'_(1n)(t)],[a'_21(t),a'_22(t), ..., a'_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a'_(m1)(t), a'_(m2)(t) , ..., a'_(mn)(t)] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6dea4b2fd091d4ac8bb1c3bc5e4634a2.png "A'(t) = [[a'_11(t), a'_12(t) ,..., a'_(1n)(t)],[a'_21(t),a'_22(t), ..., a'_(2n)(t)], [vdots,vdots ,ddots, vdots] ,[a'_(m1)(t), a'_(m2)(t) , ..., a'_(mn)(t)] ]")
![intA(t)dt = [[inta_11(t)dt, inta_12(t)dt ,..., inta_(1n)(t)dt],[inta_21(t)dt,inta_22(t)dt, ..., inta_(2n)(t)dt], [vdots,vdots ,ddots, vdots] ,[inta_(m1)(t)dt, inta_(m2)(t)dt , ..., inta_(mn)(t)dt ] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a69188820d8bc3b4651e71bf65c1a4a1.png "intA(t)dt = [[inta_11(t)dt, inta_12(t)dt ,..., inta_(1n)(t)dt],[inta_21(t)dt,inta_22(t)dt, ..., inta_(2n)(t)dt], [vdots,vdots ,ddots, vdots] ,[inta_(m1)(t)dt, inta_(m2)(t)dt , ..., inta_(mn)(t)dt ] ]")
![A(t) = [(4 e^(4t) , 3te^(-t^2)) , (t^2cos(-3t^3) , -5t^7)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e260d44aa8962acbcfca944b87561594.png "A(t) = [(4 e^(4t) , 3te^(-t^2)) , (t^2cos(-3t^3) , -5t^7)]")
![intA(t)dt=[intA_(ij)(t)dt]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fb91f39a2056595334eae944258f2529.png "intA(t)dt=[intA_(ij)(t)dt]")
![=[(int4 e^(4t) dt, int3te^(-t^2)dt) , (intt^2cos(-3t^3)dt , int-5t^7dt)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f1c6b4f5306a593ff3b874f5b9804f42.png "=[(int4 e^(4t) dt, int3te^(-t^2)dt) , (intt^2cos(-3t^3)dt , int-5t^7dt)]")
![=[(e^(4t) , -3/2e^(-t^2)) , (-1/9sin(-3t^3) , -5/8t^8)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/50141623c3722d9c48bd8303ee2119b1.png "=[(e^(4t) , -3/2e^(-t^2)) , (-1/9sin(-3t^3) , -5/8t^8)]")
![A = [(0,-3,3),(3,4,-3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9c7f56b004d3b9448921f07fbd3462ce.png "A = [(0,-3,3),(3,4,-3)]")
![B = [(-4,0,-4),(-3,0,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/95aa11af9c8a881c3754d1730352c887.png "B = [(-4,0,-4),(-3,0,0)]")

![C=[(16,-6,22),(18,8,-6)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/933567a6b900f6463406f0a8ff69f2fb.png "C=[(16,-6,22),(18,8,-6)]")
![A = [(-8,3),(21,-8)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8ca06309b54ecd2ae6eed2138a520042.png "A = [(-8,3),(21,-8)]")
![A^-1=[(-8,-3),(-21,-8)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8d91dc28a86a262c2cc118705da3f82a.png "A^-1=[(-8,-3),(-21,-8)]")
![A = [(3,2,0),(1,1,0),(-2,-4,1)].](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f80f4c1e98677cc5f6a6e40e74b0bb53.png "A = [(3,2,0),(1,1,0),(-2,-4,1)].")
![A^-1=[(1,-2,0),(-1,3,0),(-2,8,1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e8431e8128873efe5cc9d3e68fc9db33.png "A^-1=[(1,-2,0),(-1,3,0),(-2,8,1)]")
![A=[(5,-5),(-2,-4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0ff891b46255ec44d23ca47143f01224.png "A=[(5,-5),(-2,-4)]")
![B=[(-2,1),(4,4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9f58131b885d5330d7042f85dc67f65f.png "B=[(-2,1),(4,4)]")
![AB=[(-30,-15),(-12,-18)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f76e039cfee5d994aa88a388a7d28eac.png "AB=[(-30,-15),(-12,-18)]")
![A(t) = [(-2 e^(4t) , 3te^(-3t^2)) , (-5tsin(4t^2) , -7t^-5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/029f698df95cca3a671f439f947c3a7a.png "A(t) = [(-2 e^(4t) , 3te^(-3t^2)) , (-5tsin(4t^2) , -7t^-5)]")

![[(-1/2 e^(4t) , -1/2e^(-3t^2)) , (5/8cos(4t^2) , 7/4t^-4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4c148808d817bdb08a167f798b55340b.png "[(-1/2 e^(4t) , -1/2e^(-3t^2)) , (5/8cos(4t^2) , 7/4t^-4)]")
x_n=b_1),(a_21x_1+a_22x_2+...+a_(2n)x_n=b_2 ),(\ \ \ \...),(\ \ \ \...),(\ \ \ \...),(a_(m1)x_1+a_(m2)x_2+...+a_(m\n)x_n=b_m ) :}")
![[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fd01831660b27cbc3917318d29e7212d.png "[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(m1), a_(m2) , ..., a_(mn)] ]")
![[[x_1],[x_2], [vdots] ,[x_n] ]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d2d7f9db47967f1b580faa26dc51b130.png "[[x_1],[x_2], [vdots] ,[x_n] ]=")
![[[b_1],[b_2], [vdots] ,[b_m] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/776f8619e2ba6d1801963d58a8560cc5.png "[[b_1],[b_2], [vdots] ,[b_m] ]")
 = bb(b)")
")
")
![[[a_11, a_12 ,..., a_(1n),|,b_1],[a_21,a_22, ..., a_(2n),|,b_2], [vdots,vdots ,ddots, vdots,|,vdots] ,[a_(m1), a_(m2) , ..., a_(mn),|,b_m] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8e1016c8e094d7167781189dc97e8c01.png "[[a_11, a_12 ,..., a_(1n),|,b_1],[a_21,a_22, ..., a_(2n),|,b_2], [vdots,vdots ,ddots, vdots,|,vdots] ,[a_(m1), a_(m2) , ..., a_(mn),|,b_m] ]")


_1, bb(v)_2, ..., bb(v)_n }.")





=bb(0)")


![bb v_1=[(1),( 5),(1)], \ bb v_2=[( -1),( 7),(-1)], \ bb v_3=[( 6),( 0),(9)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8a672315642bdbcbaa65a052ea25f27a.png "bb v_1=[(1),( 5),(1)], \ bb v_2=[( -1),( 7),(-1)], \ bb v_3=[( 6),( 0),(9)]")
![V=[[1,-1,6],[5,7,0],[1,-1,9]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/41b4721fb4b9fac2004ddb716260bedb.png "V=[[1,-1,6],[5,7,0],[1,-1,9]]")
=36")
![bb v_1=[(5),( 6),(-10)], \ bb v_2=[( 1),( -1),(-2)], \ bb v_3=[( 4),( -2),(-8)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/579c8f4d966d22e0388c77eb8d373a1e.png "bb v_1=[(5),( 6),(-10)], \ bb v_2=[( 1),( -1),(-2)], \ bb v_3=[( 4),( -2),(-8)]")
![V=[[5,1,4],[6,-1,-2],[-10,-2,-8]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0a3f1607a117aca2d4a8405e66eac902.png "V=[[5,1,4],[6,-1,-2],[-10,-2,-8]]")
=0")
![[[5,1,4,|,0],[6,-1,-2,|,0],[-10,-2,-8,|,0]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ab401bba7e2c50eac1163e4cbc7d787a.png "[[5,1,4,|,0],[6,-1,-2,|,0],[-10,-2,-8,|,0]]")
![[[1,0,2/11,|,0],[0,1,34/11,|,0],[0,0,0,|,0]]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/af5881d02157986618fa9b1b9122ac7e.png "[[1,0,2/11,|,0],[0,1,34/11,|,0],[0,0,0,|,0]]")


 » title= »-> » class= »asciimath mathjax »>
» title= »-> » class= »asciimath mathjax »>



=-2")
=-34")
+c_2 bb(v_2)+c_3 bb(v_3)=bb(0)")
-34bb(v_2)+11bb(v_3)=bb(0)")
,(-x+3y+2z = -6),(-4x+4y-z = -14):}")

![bb(v_1)=[(5),( 6),(-10)], \ bb(v_2)=[( 2),( 1),(-4)], \ bb(v_3)=[( -2),( 0),(6)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7a1bcf40e9220baa52784f769b854ad6.png "bb(v_1)=[(5),( 6),(-10)], \ bb(v_2)=[( 2),( 1),(-4)], \ bb(v_3)=[( -2),( 0),(6)]")
=-14")
![bb (v_1)=[(6),( 2),(-18)], \ bb (v_2)=[( 4),( 1),(-12)], \ bb (v_3)=[( 0),( -3),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b1efea50c60c6ea4e9f3c8c6dfe3cfb4.png "bb (v_1)=[(6),( 2),(-18)], \ bb (v_2)=[( 4),( 1),(-12)], \ bb (v_3)=[( 0),( -3),(0)]")
")
")




")
")
bb{v} =bb(0)")

=det(A-lambda I)")
 = 0.")


![A=[(3,5),(1,-1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d74d05e7a2fc9b33ae87796160f24505.png "A=[(3,5),(1,-1)]")

![=[(3,5),(1,-1)] -lambda[(1,0),(0,1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f80f822493de27f66e3b49135fe0a5d3.png "=[(3,5),(1,-1)] -lambda[(1,0),(0,1)]")
![=[(3-lambda,5),(1,-1-lambda) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4de0cca10041955f4b0ff7bfdeaeb87d.png "=[(3-lambda,5),(1,-1-lambda) ]")
,(1,-1-lambda) |")
(lambda+1)-5")

(lambda+2)")
")


bb(u)=bb(0)")
![[(3-lambda_1,5),(1,-1-lambda_1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6ef987f624902a983a183e7b0b8e55a3.png "[(3-lambda_1,5),(1,-1-lambda_1)]")
![[(u_1),(u_2)]=[(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e9b1c0442c96e0d85aaf52b869bdcbfa.png "[(u_1),(u_2)]=[(0),(0)]")
![[(3-4,5),(1,-1-4) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/707d89bbf1e3155fe2c65357ab93b0ee.png "[(3-4,5),(1,-1-4) ]")
![[(-1,5),(1,-5) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4fdd357d7663611bd8e8a14ce8a823ab.png "[(-1,5),(1,-5) ]")
![[(-1,5,|,0),(1,-5,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c7f27a0f136a71e397bacd19f7d93af3.png "[(-1,5,|,0),(1,-5,|,0) ]")

![[(1,-5,|,0),(-1,5,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a8c5ad9a1a1f3f4bd2596159b50628da.png "[(1,-5,|,0),(-1,5,|,0) ]")
 )
)![[(1,-5,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/97c2f67c1b292ae52ab2bd38f61f1f63.png "[(1,-5,|,0),(0,0,|,0) ]")





![bb(u_1)=[(u_1),(u_2)]=t[(5),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8b126cb4ca21bfcebdc24d9a9435b197.png "bb(u_1)=[(u_1),(u_2)]=t[(5),(1)]")

")
![=[(5),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/945c3e3d85b1cddd3e6489a0aed8ad94.png "=[(5),(1)]")
![[(3-lambda_2,5),(1,-1-lambda_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/611a138f9809e0247ce43bfc7af8009e.png "[(3-lambda_2,5),(1,-1-lambda_2)]")
![[(3+2,5),(1,-1+2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/155fa47df0e5a0de95b157cdeb73d229.png "[(3+2,5),(1,-1+2) ]")
![[(5,5),(1,1) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3e852eaa6723a3ea234376260d10316a.png "[(5,5),(1,1) ]")
![bb(u_2)=[(u_1),(u_2)]=t[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4454399dcd1e61e1538e284fc960e4de.png "bb(u_2)=[(u_1),(u_2)]=t[(-1),(1)]")
")
![=[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/498f3f35f1049be0a6f6a50ecc2365de.png "=[(-1),(1)]")
![A=[(-7,-1),(5,-9)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/92dde544a0e44c46593b10fa6a3ff8a2.png "A=[(-7,-1),(5,-9)]")
![=[(-7,-1),(5,-9)] -lambda[(1,0),(0,1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/142265c7f50c7cdc32aa99c4cbf698e7.png "=[(-7,-1),(5,-9)] -lambda[(1,0),(0,1)]")
![=[(-7-lambda,-1),(5,-9-lambda)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d2783928d985cc6e6ff2304dec57d000.png "=[(-7-lambda,-1),(5,-9-lambda)]")
,(5,-9-lambda) |")
(9+lambda)+5")

^2+4")
^2+4=0")
^2=-4")



![[(-7-(-8-2i),-1),(5,-9-(-8-2i)) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ec87112680bc523e491ba8c450510a1a.png "[(-7-(-8-2i),-1),(5,-9-(-8-2i)) ]")
![[(1+2i,-1),(5,-1+2i) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e1601a94e659c5eb5a717748fcc93f87.png "[(1+2i,-1),(5,-1+2i) ]")
![[(1+2i,-1 ,|,0),(5,-1+2i ,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/172bc144b97c324bf6fc74cf0afe93fa.png "[(1+2i,-1 ,|,0),(5,-1+2i ,|,0) ]")
 )
)![[(5,-1+2i ,|,0),(5,-1+2i ,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dafb15e6dae4d39c3bd7e25f8bac65dc.png "[(5,-1+2i ,|,0),(5,-1+2i ,|,0) ]")

![[(5,-1+2i ,|,0) ,(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/962d1b76c8c6dd9f1679c916d2df1277.png "[(5,-1+2i ,|,0) ,(0,0,|,0) ]")
 ) »
) »![[(1,-1/5+2/5i ,|,0) ,(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2b56063ac13ddd09cd5df5819b10f3f5.png "[(1,-1/5+2/5i ,|,0) ,(0,0,|,0) ]")
u_2=0")
 )
) t")
![bb(u_1)=t[(1/5-2/5i ),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/28c654a0e37af8671a1ed18dabca4afd.png "bb(u_1)=t[(1/5-2/5i ),(1)]")


![bb(u_1)=[(1-2i),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9069c527ffce7cfb3a46fe00e1af06a1.png "bb(u_1)=[(1-2i),(5)]")
![=[(1),(5)]-i[(2),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/93313608f4248b67e1e5773f42a6f41a.png "=[(1),(5)]-i[(2),(0)]")

![=[(1+2i),(5)] =[(1),(5)]+i[(2),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/66c7a07f16a4c8197d6a45c04949d0fd.png "=[(1+2i),(5)] =[(1),(5)]+i[(2),(0)]")
![A=[(0,6,-2),(0,-2,0),(1,3,-3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/881e53e10622ef2b0b8159be78b4d4c0.png "A=[(0,6,-2),(0,-2,0),(1,3,-3)]")
![=[(0,6,-2),(0,-2,0),(1,3,-3)] -lambda[(1,0,0),(0,1,0),(0,0,1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/20463cc54c4241196234c4401dfc8fe1.png "=[(0,6,-2),(0,-2,0),(1,3,-3)] -lambda[(1,0,0),(0,1,0),(0,0,1)]")
![=[(-lambda,6,-2),(0,-2-lambda,0) ,(1,3,-3-lambda)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/36f6d1828b1d58e8b25050b18da0dcc6.png "=[(-lambda,6,-2),(0,-2-lambda,0) ,(1,3,-3-lambda)]")
,(0,-2-lambda,0) ,(1,3,-3-lambda) |")
 ,(3,-3-lambda) |+|(6,-2),(-2-lambda,0) |")
(-3-lambda)-(-2-lambda)(-2)")
(lambda^2+3lambda+2)")
^2(lambda+1)")
=-2")

,(0,-2-lambda,0) ,(1,3,-3-lambda) |")
![[(u_1),(u_2),(u_3)]=[(0),(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6dc2224125889777fa8b76b924f340f7.png "[(u_1),(u_2),(u_3)]=[(0),(0),(0)]")
,(0,-2+2,0) ,(1,3,-3+2) |")
,(0,0,0) ,(1,3,-1) |")
 )
),(1,3,-1),(0,0,0) |")

,(2,6,-2) ,(0,0,0) |")

,(0,0,0) ,(0,0,0) |")






)")
![bb(u_(1,2))=[(u_1),(u_2),(u_3)]=[(-3s+t),(s),(t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5eb7dda41f187583ddd4cda7782acfec.png "bb(u_(1,2))=[(u_1),(u_2),(u_3)]=[(-3s+t),(s),(t)]")
![=s[(-3),(1),(0)]+t[(1),(0),(1)],](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8fae2282abafc7021bf4819558871b5f.png "=s[(-3),(1),(0)]+t[(1),(0),(1)],")

![{[(-3),(1),(0)], \ [(1),(0),(1)]}](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/33ecad6b9640b39a6c959b4dded2c3b2.png "{[(-3),(1),(0)], \ [(1),(0),(1)]}")
")
![bb(u_1)=[(-3),(1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/90a421ec164449e262f65db7fe7f8152.png "bb(u_1)=[(-3),(1),(0)]")
![bb(u_2)= [(1),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0904e4682f9649980fb1bd2811d4a26b.png "bb(u_2)= [(1),(0),(1)]")
,(0,-1,0) ,(1,3,-2) |")
 )
),(0,-1,0) ,(0,-3,0) |")

,(0,1,0) ,(0,-3,0) |")
 )
),(0,1,0) ,(0,0,0) |")

,(0,1,0) ,(0,0,0) |")



")
![bb(u_3)=[(u_1),(u_2),(u_3)]=[(2t),(0),(t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5485e3cbebd273822649958c01dd7d0d.png "bb(u_3)=[(u_1),(u_2),(u_3)]=[(2t),(0),(t)]")
![=t[(2),(0),(1)],](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/300b69b36adaae1c44dfde90aef93e62.png "=t[(2),(0),(1)],")
![=[(2),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/aeae6f8f8372c9300c3f9e442f2e4500.png "=[(2),(0),(1)]")
![[(0,-5),(4,6)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ddbeb1694f9b15a9a6a780b35c95155a.png "[(0,-5),(4,6)]")
=")
")
![[(5,2,8),(-4,-1,-16),(0,0,3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/87f33c85ec451b606bccbb123823e68d.png "[(5,2,8),(-4,-1,-16),(0,0,3)]")
![lambda_1=1, \ bb(v_1)=[(-1),(2),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9954daa4b3be8131b181e8aa3bdfb674.png "lambda_1=1, \ bb(v_1)=[(-1),(2),(0)]")
![lambda_(2,3)=3, \ bb(v_2)=[(-1),(1),(0)], \ bb(v_3)=[(-4),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/088d28733e9d2add8c65a34e6a8dff53.png "lambda_(2,3)=3, \ bb(v_2)=[(-1),(1),(0)], \ bb(v_3)=[(-4),(0),(1)]")
![[(-5,-4),(14,10)].](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/953e9e4555d90d812a5642717ce90a03.png "[(-5,-4),(14,10)].")
![lambda_1=3, \ bb(v_1)=[(1),(-2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cd6a3374be1cafd5ceed9426ec9cdbe4.png "lambda_1=3, \ bb(v_1)=[(1),(-2)]")
![lambda_2=2, \ bb(v_2)=[(4),(-7)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/093ea8ebff350734b07ee92daa2f62c8.png "lambda_2=2, \ bb(v_2)=[(4),(-7)]")
y_n+f_1(t)),(y'_2=a_21y_1+a_22y_2+...+a_(2n)y_n+f_2(t) ),(vdots),(y'_n=a_(n1)y_1+a_(n2)y_2+...+a_(n\n)y_n+f_n(t) ) :}")
![[[y'_1],[y'_2], [vdots] ,[y'_n] ]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ccd697174769ff7d7bdbae8e78cb46af.png "[[y'_1],[y'_2], [vdots] ,[y'_n] ]=")
![[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b3cbeb5023078db66d19fce4b66d8644.png "[[a_11, a_12 ,..., a_(1n)],[a_21,a_22, ..., a_(2n)], [vdots,vdots ,ddots, vdots] ,[a_(n1), a_(n2) , ..., a_(n\n)] ]")
![[[y_1],[y_2], [vdots] ,[y_n] ]+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ebe315c7d2963a400b4e6697c0b4eb9d.png "[[y_1],[y_2], [vdots] ,[y_n] ]+")
![[[f_1],[f_2], [vdots] ,[f_n] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1bcff6840b1963b01a8954227bcfaf50.png "[[f_1],[f_2], [vdots] ,[f_n] ]")
= A(t)bb(y) + bb(f)(t)")
")
)=0")
 = A(t)bb(y) + bb(f)(t),")
(t_0) = bb(k)")

![veck=[[k_1],[k_2], [vdots] ,[k_n] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4e55b4ce0b94d9cb0a7f416f1c0ce1bf.png "veck=[[k_1],[k_2], [vdots] ,[k_n] ]")
),(y'_2=y_1+y_2+e^(2t)) :}")
![[(y'_1),(y'_2)] =[(2,1),(1,1)][(y_1),(y_2)]+[(-3e^(2t)),(e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4b1c0d2c3e496d7fdc68dcc0df19b691.png "[(y'_1),(y'_2)] =[(2,1),(1,1)][(y_1),(y_2)]+[(-3e^(2t)),(e^(2t))]")
![bb (y)'=[(2,1),(1,1)]bb"y"+[(-3),(1)]e^(2t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6120e29dc4cbba74f61873b7de90daf9.png "bb (y)'=[(2,1),(1,1)]bb\"y\"+[(-3),(1)]e^(2t)")
![bb"y'"=[(2,1),(1,1)]bb"y"+[(-3),(1)]e^(2t),](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/07d626e19e96d1eb9a92ed9ccc69309f.png "bb\"y'\"=[(2,1),(1,1)]bb\"y\"+[(-3),(1)]e^(2t),")
!["y"(t_0)=[(k_0),(k_1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a4808305845881f46225b0164f6cd4da.png "\"y\"(t_0)=[(k_0),(k_1)]")
")

bb\"y\"+bb\"f\"(t),")
=bb\"k\"")
![bb"y"=c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/afc4bd5a77680c0963eb20b1da9e542e.png "bb\"y\"=c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)")
![bb"y'"=[(-4,-10),(3,7)]bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/385fbc75d4bb938f7ce19133c59cebfe.png "bb\"y'\"=[(-4,-10),(3,7)]bb\"y\"")
![bb"y'"=[(-4,-10),(3,7)]bb"y",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/643c5c88ba2fab51b2b10702925c9d9e.png "bb\"y'\"=[(-4,-10),(3,7)]bb\"y\",")
![bb"y"(0)=[(1),(-2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/26b7c7117caffaea4f07062c15efec5f.png "bb\"y\"(0)=[(1),(-2)]")
")
=bb(y)'")


![c_1[(-4,-10),(3,7)][(-5),(3)]e^(2t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3dbb67690946a8c1e7a9a334e5e54269.png "c_1[(-4,-10),(3,7)][(-5),(3)]e^(2t)")
![+c_2[(-4,-10),(3,7)] [(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5f42b9666dfda35ca48c88ea05fdda94.png "+c_2[(-4,-10),(3,7)] [(2),(-1)]e^(t)")
![=c_1[(-10),(6)]e^(2t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bebc82b97bd9485d63dda5928f55558f.png "=c_1[(-10),(6)]e^(2t)")
![+c_2[(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/633798d07769d503f5f35d0e9f0271c3.png "+c_2[(2),(-1)]e^(t)")

'=")
![c_1[(-5),(3)]d/dt( e^(2t))+c_2[(2),(-1)]d/dt( e^(t) )](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8896748e05e5bb5b7b51793a6802e8ec.png "c_1[(-5),(3)]d/dt( e^(2t))+c_2[(2),(-1)]d/dt( e^(t) )")
![=2c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/29d2171b496f5108afbbc6ac248d6d0b.png "=2c_1[(-5),(3)]e^(2t)+c_2[(2),(-1)]e^(t)")
![=c_1[(-10),(6)]e^(2t)+c_2[(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9f458dc36d0a0af01fce1d26d665542f.png "=c_1[(-10),(6)]e^(2t)+c_2[(2),(-1)]e^(t)")


![c_1[(-5),(3)]e^(0)+c_2[(2),(-1)]e^(0)=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e74b4e7534d6bdc93521f813b81c0c60.png "c_1[(-5),(3)]e^(0)+c_2[(2),(-1)]e^(0)=")
![[(1),(-2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b6c80c345d893aac080a8e1b60cd9c13.png "[(1),(-2)]")
![[(-5c_1+2c_2),(3c_1-c_2)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f5f2af3a2e2187d0fb629a248d220d7a.png "[(-5c_1+2c_2),(3c_1-c_2)]=")
,(3c_1-c_2=-2 ):}")


![bb(y)=-3[(-5),(3)]e^(2t)-7[(2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4cd81284cdc89aa2631bb58058ed8526.png "bb(y)=-3[(-5),(3)]e^(2t)-7[(2),(-1)]e^(t)")
y^{(n)} + a_{n-1}(t)y^{(n-1)} + cdots + a_1(t)y' + a_0(t)y = g(t)")




}")


} = x_n")
} = g(t) - a_{n-1}(t)y^{(n-1)} - cdots - a_1(t)y' - a_0(t)y")
 - a_{n-1}(t)x_n - cdots - a_1(t)x_2 - a_0(t)x_1")



,")
=1,\ y'(0)=-1")





-2/3y'+2y")

-2/3x_2+2x_1")
=y(0)=1")
=y'(0)=-1")

")
=1, \ x_2(0)=-1")
,(y_2' = 6 y_1 + 3 y_2 + 5 t^4):}")
![[(y_1'),(y_2')]=[(2,-2),(6,3)][(y_1),(y_2)]+[(-2),(5)]t^4](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/acdaa2ba77826629fe9d012fdb134d88.png "[(y_1'),(y_2')]=[(2,-2),(6,3)][(y_1),(y_2)]+[(-2),(5)]t^4")

")

")
![[(x'),(y')] = [(3,-5),(2,4)] \ [(x),(y)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/48af37b2f7360f3cd94c24ded9a6052f.png "[(x'),(y')] = [(3,-5),(2,4)] \ [(x),(y)]")

'=Abb(y)")





![[[y_11, y_12 ,..., y_(1n)],[y_21,y_22, ..., y_(2n)], [vdots,vdots ,ddots, vdots] ,[y_(n1), y_(n2) , ..., y_(n\n)] ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/210673bd528f7b46a75654b5191793d8.png "[[y_11, y_12 ,..., y_(1n)],[y_21,y_22, ..., y_(2n)], [vdots,vdots ,ddots, vdots] ,[y_(n1), y_(n2) , ..., y_(n\n)] ]")
![[[c_1],[c_2], [vdots] ,[c_n] ]=bb"0"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2b120ae9b191de4d93fb48c7d2ce0379.png "[[c_1],[c_2], [vdots] ,[c_n] ]=bb\"0\"")
![bb"c"=[[c_1],[c_2], [vdots] ,[c_n] ]=bb"0"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/578b6b9fd0d79d52a0f08f0415c73ee2.png "bb\"c\"=[[c_1],[c_2], [vdots] ,[c_n] ]=bb\"0\"")
![[(bb"y"_1,bb"y"_2, ..., bb"y"_n)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1a2fe1fcf4b963095fb626a316b0791e.png "[(bb\"y\"_1,bb\"y\"_2, ..., bb\"y\"_n)]")
")
=|bb\"y\"_1 \ bb\"y\"_2 \ ... \ bb\"y\"_n|")
")
=")
![[(bb"y"_1,bb"y"_2, ..., bb"y"_n)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5837101a172e7de88ce571f8e1d4566e.png "[(bb\"y\"_1,bb\"y\"_2, ..., bb\"y\"_n)]=")
![bb"y"_1=[(-2),(3)]e^(3t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1fd5b4549a72bc72f0fdf85446d5ef0e.png "bb\"y\"_1=[(-2),(3)]e^(3t)")
![bb"y"_2=[(-2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ce30498e8d09c443028da1a1df6ca37a.png "bb\"y\"_2=[(-2),(-1)]e^(t)")

=|bb\"y\"_1 \ \ bb\"y\"_2|")
,-2e^t),(3e^(3t),-e^t)|")
+6e^(4t)")
")
!=0")
![Y=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a576b4cafb66b8f1a0074ec88604132b.png "Y=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]")

![=c_1[(-2),(3)]e^(3t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c5afe47b33ed8874b02d56a117021304.png "=c_1[(-2),(3)]e^(3t)")
![+c_2[(-2),(-1)]e^(t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/89415a04f31518914c703e9f90dbf3ef.png "+c_2[(-2),(-1)]e^(t)")
![=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/17d51d9f9e97c367634208d7f53f2113.png "=[(-2e^(3t),-2e^t),(3e^(3t),-e^t)]")
![[(c_1),(c_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9163ee11f687e7de98db610527c319eb.png "[(c_1),(c_2)]")
")
 = e^(rt)mathbf(u)")

")

mathbf(u) = Ae^(rt)mathbf(u)")
")
 = Amathbf(u)")
mathbf(u) = 0")
![bb"y"_1=[(-5),(6)]e^(-t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d3f7da196b2cca467e0df2d229fe6c01.png "bb\"y\"_1=[(-5),(6)]e^(-t)")
![bb"y"_2=[(3),(1)]e^(4t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5819b83ce59ffa93ac4816e340cfc10e.png "bb\"y\"_2=[(3),(1)]e^(4t)")
=-23 e^(3t)")
![bb"y"_1=[(-1),(-1)]e^(4t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0c94f9223a83180a74c18706c1b00479.png "bb\"y\"_1=[(-1),(-1)]e^(4t)")
![bb"y"_2=[(-7),(-2)]e^(-4t)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/92435f434d3d68de4b2ee75793dbd2d7.png "bb\"y\"_2=[(-7),(-2)]e^(-4t)")
=-5")










 = c_1e^{\lambda_1 t} \mathbf{u}_1 + c_2 e^{\lambda_2 t} \mathbf{u}_2 + \ldots + c_n e^{\lambda_n t} \mathbf{u}_n")
![bb"y"'=[(-6,-3),(1,-2)]bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/38c61dc42f329494306f5698e5b7cdcd.png "bb\"y\"'=[(-6,-3),(1,-2)]bb\"y\"")
,(1,-2-lambda) |")
(lambda+2)+3")

(lambda+3)")


bb\"u\"=bb\"0\"")
bb\"u\"=bb\"0\"")
![[(-5+6,3),(-1,-5+2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fd4deaa946c17175501bf60f9a18aed9.png "[(-5+6,3),(-1,-5+2) ]")
![[(1,3),(-1,-3) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d38c9ba6a5327c7e4de0f4489c470f09.png "[(1,3),(-1,-3) ]")
![bb"u"_1=t[(-3),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e4da5d17db48a23bea55c28c22904bc9.png "bb\"u\"_1=t[(-3),(1)]")

![=[(-3),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/be2f3302a914133956a21f686e379aa2.png "=[(-3),(1)]")
bb(u)=bb(0)")
![[(-3+6,3),(-1,-3+2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a77db9161968655810f9900bc9fff30a.png "[(-3+6,3),(-1,-3+2) ]")
![[(3,3),(-1,-1) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f3713f46c0713d57dafc682bb73b40ed.png "[(3,3),(-1,-1) ]")
![[(3,3,|,0),(-1,-1,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/94f8def0ebc64f080d18d0826164df4f.png "[(3,3,|,0),(-1,-1,|,0) ]~")
![[(1,1,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6985ba3fb517bc3844d2d5b03fc12f76.png "[(1,1,|,0),(0,0,|,0) ]")
![bb"u"_2=t[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d7edd41fab71b4c250b10a63da2cf820.png "bb\"u\"_2=t[(-1),(1)]")

![bb"y"(t)=c_1e^(-5t) [(-3),(1)]+c_2 e^(-3t) [(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2bdc07a3d8b0e6449fd9c9ab4cb433ab.png "bb\"y\"(t)=c_1e^(-5t) [(-3),(1)]+c_2 e^(-3t) [(-1),(1)]")
,(y_2' = 2 y_1 -7 y_2):},")
 = 7, \quad y_2(0) = 3")
![bb"y"'=[(4,-15),(2,-7) ]bb"y",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6888113509412f74f9b600c4920eb89b.png "bb\"y\"'=[(4,-15),(2,-7) ]bb\"y\",")
![bb"y"(0)=[(7),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/543ee09260447a166e588c6bc4e775f2.png "bb\"y\"(0)=[(7),(3)]")
,(2,-7-lambda) |")
(-7-lambda)+30")

(lambda+2)")

![[(4+1,-15),(2,-7+1) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c6e4f7284ad4e9979fb1b0af976cdd55.png "[(4+1,-15),(2,-7+1) ]")
![[(5,-15),(2,-6) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ccbf25f2e3dca99aa6b0eaa43b12706e.png "[(5,-15),(2,-6) ]")
![[(5,-15,|,0),(2,-6,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bc8d57ed8916e2134a539f0787410123.png "[(5,-15,|,0),(2,-6,|,0) ]~")
![[(1,-3,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8dff248d0a39c59e481fff56e75ed5d7.png "[(1,-3,|,0),(0,0,|,0) ]")
![bb"u"_1=t[(3),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3e5e54dc66c7af503627d7e2fe951835.png "bb\"u\"_1=t[(3),(1)]")
![=[(3),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/45e9e12108afcbd1818417640251c611.png "=[(3),(1)]")
bb\"u\"=bb\"0\"")
![[(4+2,-15),(2,-7+2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c4fed569316fb5d506cce7c8942e7617.png "[(4+2,-15),(2,-7+2) ]")
![[(6,-15),(2,-5) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0cc9eeaf193b444e4f54c5eff1457686.png "[(6,-15),(2,-5) ]")
![[(6,-15,|,0),(2,-5,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/987b097e57a9c89d1360b0343fa801ca.png "[(6,-15,|,0),(2,-5,|,0) ]~")
![[(1,-5/2,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a81aa9b57eaef4dffb2a967c7a9321e1.png "[(1,-5/2,|,0),(0,0,|,0) ]")
![bb"u"_2=t[(5/2),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5003be2be2b2ca9a733b01d5abc6407b.png "bb\"u\"_2=t[(5/2),(1)]")

![=[(5),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0ac20742c10b8d51093885b4058a4542.png "=[(5),(2)]")
![bb"y"(t)=c_1e^(-t) [(3),(1)]+c_2 e^(-2t) [(5),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e5595c165b6d608e0dd5c0d3262f6084.png "bb\"y\"(t)=c_1e^(-t) [(3),(1)]+c_2 e^(-2t) [(5),(2)]")
![c_1e^(0) [(3),(1)]+c_2 e^(0) [(5),(2)]=[(7),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e640c171996d8cbe0a6303e4efc35844.png "c_1e^(0) [(3),(1)]+c_2 e^(0) [(5),(2)]=[(7),(3)]")
![[(3c_1+5c_2),(c_1+2c_2)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d36f9d592255261a1ff35b51afb34e7a.png "[(3c_1+5c_2),(c_1+2c_2)]=")
![[(7),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e11f12523a31660dd0be9e941954d2f7.png "[(7),(3)]")
,(c_1+2c_2=3 ):}")


![bb"y"(t)=-e^(-t) [(3),(1)]+2 e^(-2t) [(5),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3245be839a3e3c9dcfaf82f1c378f6ff.png "bb\"y\"(t)=-e^(-t) [(3),(1)]+2 e^(-2t) [(5),(2)]")
,(y_2' = 11 y_2 -7 y_3),(y_3' = 14 y_2 -10 y_3) :},")
 = -3, \ y_2(0) = -1, \ y_3(0)=1")
![bb"y"'=[(3,14,-13),(0,11,-7),(0,14,-10) ]bb"y",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2bf68d5c7004f34f0ad99eb61d8b79fd.png "bb\"y\"'=[(3,14,-13),(0,11,-7),(0,14,-10) ]bb\"y\",")
![bb"y"(0)=[(-3),(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5b0af8aebe1f0b853bec18a265e2845e.png "bb\"y\"(0)=[(-3),(-1),(1)]")
,(0,11-lambda,-7),(0,14,-10-lambda)|")
|(11-lambda,-7),(14,-10-lambda)|")
(lambda^2-lambda-12)")
(lambda+3)(lambda-4)")



![=[(0,14,-13),(0,8,-7),(0,14,-13)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cd5fccd0048d80d02286f0ac117c9b26.png "=[(0,14,-13),(0,8,-7),(0,14,-13)]")
![[(0,14,-13,|,0),(0,8,-7,|,0),(0,14,-13,|,0)]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/320c4c73672d92f46818b2d2ada01b6e.png "[(0,14,-13,|,0),(0,8,-7,|,0),(0,14,-13,|,0)]~")
![[(0,1,0,|,0),(0,0,1,|,0),(0,0,0,|,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bbc94483e774662380e69eaf22cea584.png "[(0,1,0,|,0),(0,0,1,|,0),(0,0,0,|,0)]")
![bb"u"_1=t[(1),(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ad39fa631be7613d5c978895aacdd577.png "bb\"u\"_1=t[(1),(0),(0)]")
![=[(1),(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b26f36a02ead78466df895fa6d4eef79.png "=[(1),(0),(0)]")
![=[(-1,14,-13),(0,7,-7),(0,14,-14)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8d5bd90017cc902da2275ea9b324171e.png "=[(-1,14,-13),(0,7,-7),(0,14,-14)]")
![[(-1,14,-13),(0,7,-7),(0,14,-14)]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a1e532665395cf1da466168b7ea37f1f.png "[(-1,14,-13),(0,7,-7),(0,14,-14)]~")
![[(1,0,-1),(0,1,-1),(0,0,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/04e4fbb13c43b87dfbca2d28f28f5d84.png "[(1,0,-1),(0,1,-1),(0,0,0)]")
![bb"u"_2=t[(1),(1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4916f6370cff8266fb8130aed43f6bf6.png "bb\"u\"_2=t[(1),(1),(1)]")
![=[(1),(1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/05f4b8b70a797f95189a83dbb0c814a2.png "=[(1),(1),(1)]")
bb\"u\"=bb\"0\"")
![=[(6,14,-13),(0,14,-7),(0,14,-7)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1b39752484d05a7cdfad01315f495eed.png "=[(6,14,-13),(0,14,-7),(0,14,-7)]")
![[(6,14,-13),(0,14,-7),(0,14,-7)]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/03b7bfd39997e75ed74b4cb7dbf4adb5.png "[(6,14,-13),(0,14,-7),(0,14,-7)]~")
![[(1,0,-1),(0,1,-1/2),(0,0,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f08bfdcfdac7d9da129eef558c26808e.png "[(1,0,-1),(0,1,-1/2),(0,0,0)]")
![bb"u"_3=t[(1),(1/2),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dd7de75c48fd70f1a46235d0447cadde.png "bb\"u\"_3=t[(1),(1/2),(1)]")

![=[(2),(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ee62b54110edb439c009de8236ec464f.png "=[(2),(1),(2)]")
![bb"y"(t)=c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7aaefd66f914840d7a488a6c5b4278bb.png "bb\"y\"(t)=c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]")
![c_1e^0 [(1),(0),(0)]+c_2 e^0 [(1),(1),(1)]+c_3e^0[(2),(1),(2)] =[(-3),(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3524223183a6cea73c3d5689278eb478.png "c_1e^0 [(1),(0),(0)]+c_2 e^0 [(1),(1),(1)]+c_3e^0[(2),(1),(2)] =[(-3),(-1),(1)]")
,(c_2+c_3=-1 ),(c_2+2c_3=1):}")



![bb"y"(t)=-4e^(3t) [(1),(0),(0)]-3 e^(4t) [(1),(1),(1)]+2e^(-3t)[(2),(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c3802243b270ce109ab6b1aae5299474.png "bb\"y\"(t)=-4e^(3t) [(1),(0),(0)]-3 e^(4t) [(1),(1),(1)]+2e^(-3t)[(2),(1),(2)]")

 = -3, \quad y'(0) = -13")


=y(0)=-3")
=y'(0)=-13")

=-3, \ x_2(0)=-13")
![bb"x"'=[(0,1),(10,-3) ]bb"x",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d50b65c563d93bd6b4c601dcab133c0c.png "bb\"x\"'=[(0,1),(10,-3) ]bb\"x\",")
![bb"x"(0)=[(-3),(-13)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/50755826da3437fdd59c07ac0b49b87c.png "bb\"x\"(0)=[(-3),(-13)]")
,(10,-3-lambda) |")
(-3-lambda)-10")

(lambda+5)")


![[(-2,1),(10,-5) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5d186004c5d7e64f66aaab55aa11d43c.png "[(-2,1),(10,-5) ]")
![[(-2,1,|,0),(10,-5,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9c6c52cac731b8f6e98ab0b27ca1e870.png "[(-2,1,|,0),(10,-5,|,0) ]~")
![[(1,-1/2,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9e8213c71e8db6ee33881c84287f43db.png "[(1,-1/2,|,0),(0,0,|,0) ]")
![bb"u"_1=t[(1/2),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a08c79201a92bcd64c1fb54c5e642814.png "bb\"u\"_1=t[(1/2),(1)]")
![=[(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6fe213f529670406fdd238c414a350ee.png "=[(1),(2)]")
![[(5,1),(10,2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4f63244685ddfdd173ed8e5c566b638f.png "[(5,1),(10,2) ]")
![[(5,1,|,0),(10,2,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/24d68543552efe12c45281b3c8559a99.png "[(5,1,|,0),(10,2,|,0) ]~")
![[(1,1/5,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/87a554c05e58a18cd8d2a5d8e0078bd7.png "[(1,1/5,|,0),(0,0,|,0) ]")
![bb"u"_2=t[(-1/5),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3c4f6a9195bb454cf3318c7ab9f58942.png "bb\"u\"_2=t[(-1/5),(1)]")
![=[(-1),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2e9a58ece306bafbb03a88f31cf55f9d.png "=[(-1),(5)]")
![bb"x"(t)=c_1e^(2t) [(1),(2)]+c_2 e^(-5t) [(-1),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f58eb59ed722908eefca8ff516fccc15.png "bb\"x\"(t)=c_1e^(2t) [(1),(2)]+c_2 e^(-5t) [(-1),(5)]")
![c_1e^(0) [(1),(2)]+c_2 e^(0) [(-1),(5)]=[(-3),(-13)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/856d900f952fb254defb3bfb5766508a.png "c_1e^(0) [(1),(2)]+c_2 e^(0) [(-1),(5)]=[(-3),(-13)]")
![[(c_1-c_2),(2c_1+5c_2)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7ac7a80f0c4c60928d5112d74b6baf55.png "[(c_1-c_2),(2c_1+5c_2)]=")
![[(-3),(-13)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/70a5d4386143b4769e9edcaed63485db.png "[(-3),(-13)]")
,(2c_1+5c_2=-13 ):}")

![bb"x"(t)=-4e^(2t) [(1),(2)]- e^(-5t) [(-1),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c52efe82042ca1b2134b55182f727bc2.png "bb\"x\"(t)=-4e^(2t) [(1),(2)]- e^(-5t) [(-1),(5)]")
![bb"x"(t)=[(x_1),(x_2)]=[(y),(y')]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f699f8809574fc72b0cb9cf2be9e4322.png "bb\"x\"(t)=[(x_1),(x_2)]=[(y),(y')]")
+e^(-5t)")
,(y_2' = 2 y_1 -3 y_2):},")
 = 4, \quad y_2(0) = 1")
=6e^(3t)-2e^t")
=2e^(3t)-e^t")
![bb"y"'=[(-17,-30),(4,5)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/16a9cdc00eb185f4eb6edffaad1b2e1f.png "bb\"y\"'=[(-17,-30),(4,5)] bb\"y\"")
![bb"y"(t)=c_1e^(-5t)[(-5),(2)]+c_2e^(-7t)[(-3),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c6a6c987b653f4658581558794aad5c5.png "bb\"y\"(t)=c_1e^(-5t)[(-5),(2)]+c_2e^(-7t)[(-3),(1)]")
![bb"y"'=[(1,-12,7),(0,-10,6),(0,-12,8)] bb"y",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/45b18f7335e0614444ea5525da6d09a3.png "bb\"y\"'=[(1,-12,7),(0,-10,6),(0,-12,8)] bb\"y\",")
![mathbfy'(0)=[(3),(4),(7)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cfb92f1fdd46c6ac9b3b7da84d2b00a7.png "mathbfy'(0)=[(3),(4),(7)]")
![bb"y"(t)=-4e^t[(1),(0),(0)]+3e^(2t)[(2),(1),(2)] +e^(-4t)[(1),(1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/bfdca9f2ab42722e54281632a9b4726f.png "bb\"y\"(t)=-4e^t[(1),(0),(0)]+3e^(2t)[(2),(1),(2)] +e^(-4t)[(1),(1),(1)]")



bb\"u\"")

(bb\"a\"cos(betat)-bb\"b\"sin(beta t))")
(bb\"a\"sin(betat)+bb\"b\"cos(beta t))")
=c_1bb\"y\"_1+c_2 bb\"y\"_2")
=")
(bb\"a\"cos(betat)-bb\"b\"sin(beta t))+")
(bb\"a\"sin(betat)+bb\"b\"cos(beta t))")
![bb"y"'=[(5,6),(-3,-1)]bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c8d891414eefe9460b3e0389ea7bac01.png "bb\"y\"'=[(5,6),(-3,-1)]bb\"y\"")
,(-3,-1-lambda) |")
(-1-lambda)+18")

^2+9")


bb\"u\"=bb\"0\"")
![[(5-(2+i3),6),(-3,-1-(2+i3)) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/89218795ad4da7974d7c6d68cfa23547.png "[(5-(2+i3),6),(-3,-1-(2+i3)) ]")
![[(3-i3,6),(-3,-3-i3) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e8d7d3e8e20fc06d41a53d3be509a986.png "[(3-i3,6),(-3,-3-i3) ]")
![[(3-i3,6,|,0),(-3,-3-i3,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0fd22ea12ccd2335a6b0c3bdc35250f5.png "[(3-i3,6,|,0),(-3,-3-i3,|,0) ]~")
![[(1,1+i,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7dfb7f0199097de96b59e447819c9315.png "[(1,1+i,|,0),(0,0,|,0) ]")
![bb"u"_1=t[(-1-i),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4a6ab4ccacf815527304b48b224d4810.png "bb\"u\"_1=t[(-1-i),(1)]")
![bb"u"_1=[(-1-i),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fdf2d97aa65b6dfcc56b377307cfa8de.png "bb\"u\"_1=[(-1-i),(1)]")
![=[(-1),(1)]+i[(-1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8e615179c467ea665a840025ced8c339.png "=[(-1),(1)]+i[(-1),(0)]")
![bb"a"=[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9803cde2a83877319fa2327dd4a8db0a.png "bb\"a\"=[(-1),(1)]")
![bb"b"=[(-1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7fba2eacacb5fade842dda019d516791.png "bb\"b\"=[(-1),(0)]")

![bb"u"_2=[(-1+i),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cd446a345827152a4156d836e1b66161.png "bb\"u\"_2=[(-1+i),(1)]")
![=[(-1),(1)]-i[(-1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/eacee602b09cda212c1a9963da9c2339.png "=[(-1),(1)]-i[(-1),(0)]")
![bb"y"(t)=c_1e^(2t)([(-1),(1)] cos(3t)-[(-1),(0)] sin(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cff9331521e60ff25cea6c16a500bcb7.png "bb\"y\"(t)=c_1e^(2t)([(-1),(1)] cos(3t)-[(-1),(0)] sin(3 t))")
![+c_2e^(2t)([(-1),(1)] sin(3t)+[(-1),(0)] cos(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/556a0db004a12acedd4c3657241c38b4.png "+c_2e^(2t)([(-1),(1)] sin(3t)+[(-1),(0)] cos(3 t))")
![=c_1e^(2t)([(-cos(3t)+sin(3t)),(cos(3t))] )](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ff278e8dcdb672271f71b40b9b124656.png "=c_1e^(2t)([(-cos(3t)+sin(3t)),(cos(3t))] )")
![+c_2e^(2t)([(-sin(3t)-cos(3t)),(sin(3t))] )](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6f36a69599e60dc4a30eedeb5a29e2e1.png "+c_2e^(2t)([(-sin(3t)-cos(3t)),(sin(3t))] )")
![bb"y"' = [[1,3],[-15,-11]] \ bb"y", \quad \ bb"y"(0) = [(-3), (12)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9ea03bc03a2613d22a5a55501fbc4ec7.png "bb\"y\"' = [[1,3],[-15,-11]] \ bb\"y\", \quad \ bb\"y\"(0) = [(-3), (12)]")
,(-15,-11-lambda) |")
(-11-lambda)+45")

^2+9")

bb\"u\"=bb\"0\"")

![[(1-lambda,3),(-15,-11-lambda) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3e7fc4e133d0be8d400f4223559fc429.png "[(1-lambda,3),(-15,-11-lambda) ]")
![[(6+i3,3),(-15,-6+i3) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c33227e247cdeed88c250c547c724086.png "[(6+i3,3),(-15,-6+i3) ]")
![[(6+i3,3,|,0),(-15,-6+i3,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cdfb259271a0c2e332501ff22b5fdaea.png "[(6+i3,3,|,0),(-15,-6+i3,|,0) ]~")
![[(1,2/5-i1/5,|,0),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c9841b8c82600d6e16eebdba0879e728.png "[(1,2/5-i1/5,|,0),(0,0,|,0) ]")
![bb"u"_1=t[(-2/5+i1/5),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ea439e45144e49f69653e3bd22681513.png "bb\"u\"_1=t[(-2/5+i1/5),(1)]")
![bb"u"_1=[(-2+i),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/916cf475ef7c412e0bb7f81c2b4867fc.png "bb\"u\"_1=[(-2+i),(5)]")
![=[(-2),(5)]+i[(1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/35b6e2905ea2b1196a963c66d65bbfa9.png "=[(-2),(5)]+i[(1),(0)]")
![bb"a"=[(-2),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0465306ac322fb9ce9ff4191a59a7be9.png "bb\"a\"=[(-2),(5)]")
![bb"b"=[(-1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4ad4bddc7597e953d2cada88f1da6144.png "bb\"b\"=[(-1),(0)]")

![bb"u"_1=[(-2+i),(5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/fb55221b2a349387f1d899e6716f04f1.png "bb\"u\"_1=[(-2+i),(5)]")
![=[(-2),(5)]+i[(1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/46752576acf42e7268d05e16fb266f31.png "=[(-2),(5)]+i[(1),(0)]")
![bb"y"(t)=c_1e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/93b6584b1852e5e8f23ac282b159166b.png "bb\"y\"(t)=c_1e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))")
![+c_2e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2810b0b4bd4591fe1ecdd07623f2c9ee.png "+c_2e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))")
![bb"y"(0)=[(-3),(12)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c9d70edadd023c7406587e78d8486529.png "bb\"y\"(0)=[(-3),(12)]")
![c_1e^(0)([(-2),(5)] cos(0)-[(1),(0)] sin(0))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/53978b822e69ff07683c48b409131436.png "c_1e^(0)([(-2),(5)] cos(0)-[(1),(0)] sin(0))")
![+c_2e^(0)([(-2),(5)] sin(0)+[(1),(0)] cos(0)) =](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1d10622ee9cb7f731e9549bdc9d359f7.png "+c_2e^(0)([(-2),(5)] sin(0)+[(1),(0)] cos(0)) =")
![[(-3),(12)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f659f82f9f02a1017da1887546b397f3.png "[(-3),(12)]")
![c_1[(-2),(5)]+c_2[(1),(0)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/60d6e74b3ed98e2d751322f15bc831c7.png "c_1[(-2),(5)]+c_2[(1),(0)]=")
,(5c_1=12 ):}")


![bb"y"(t)=12/5e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8039c5e54662cd3b4c58c9a45c384fb2.png "bb\"y\"(t)=12/5e^(-5t)([(-2),(5)] cos(3t)-[(1),(0)] sin(3 t))")
![+9/5e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d9a8e8bcb84901ba366609836cb16d5d.png "+9/5e^(-5t)([(-2),(5)] sin(3t)+[(1),(0)] cos(3 t))")
![bb"y"'=[(-7,-12),(6,5)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c4550369d47040303fbfc9bfeb86f03a.png "bb\"y\"'=[(-7,-12),(6,5)] bb\"y\"")
![bb"y"(t)=c_1e^(-t)([(-1),(1)]cos(6t)-[(1),(0)]sin(6t))+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7b49a7f0bd422ab5ed5d7ae3778dfb1f.png "bb\"y\"(t)=c_1e^(-t)([(-1),(1)]cos(6t)-[(1),(0)]sin(6t))+")
![c_2e^(-t)([(-1),(1)]sin(6t)+[(1),(0)]cos(6t))](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/17ca6af12c361f1fad1b345093985441.png "c_2e^(-t)([(-1),(1)]sin(6t)+[(1),(0)]cos(6t))")
![bb"y"' = [[4,2],[-29,-10]] \ bb"y", \quad \ bb"y"(0) = [(-2), (19)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8757c9b230ad0f7ea94e8006bf3047f6.png "bb\"y\"' = [[4,2],[-29,-10]] \ bb\"y\", \quad \ bb\"y\"(0) = [(-2), (19)]")
=-2 e^(-3t)cos(3t)+8 e^(-3t)sin(3t)")
=19 e^(-3t)cos(3t)-25 e^(-3t)sin(3t)")
![bb"y"' = [[2,1],[-17,-6]] \ bb"y", \quad \ bb"y"(0) = [(-2), (11)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d7751a6ef3fac4592cb7fc204e2b65e5.png "bb\"y\"' = [[2,1],[-17,-6]] \ bb\"y\", \quad \ bb\"y\"(0) = [(-2), (11)]")
=-2 e^(-2t)cos(t)+3 e^(-2t)sin(t)")
=11 e^(-2t)cos(t)-10 e^(-2t)sin(t)")



mathbf{v} = mathbf{u}.")
mathbf{u} = mathbf{0}")


=c_1e^{lambda t}bb{u} + c_2e^{lambda t} (tbb{u} +bb{v} )")
![bb"y'"=[(3,-1),(1,5)]bb"y",](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f09e42a2d3a103bd216148ef05508abb.png "bb\"y'\"=[(3,-1),(1,5)]bb\"y\",")
![bb"y"(0)=[(-3),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/9d5af3b8317b5f0061190a7f371f27de.png "bb\"y\"(0)=[(-3),(2)]")
,(1,5-lambda) |")
(5-lambda)+1")

^2")
=4")
 I)bb\"u\"=bb\"0\"")
![=[(3-4,-1),(1,5-4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8247dc55ff8850e55bda3a67e5ea11ea.png "=[(3-4,-1),(1,5-4)]")
![[(-1,-1),(1,1) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/87179f1e6e577c1c537729a392bd66ff.png "[(-1,-1),(1,1) ]")
![[(-1,-1,|,0),(1,1,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/89d3ec9c9b89ec2e21302fd39b0a0b9e.png "[(-1,-1,|,0),(1,1,|,0) ]~")
![bb"u"_1=t[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d3661f8ecd48fcb24ab4b5346714be3a.png "bb\"u\"_1=t[(-1),(1)]")

 I)bb{v} =bb{u}_1")
![[(v_1),(v_2)]=[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5f843c22f13f1af47bff952d5ac2b2c0.png "[(v_1),(v_2)]=[(-1),(1)]")
![[(-1,-1,|,-1),(1,1,|,1) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/21dca64a8e691e45f5a7a84c1d7c3f0b.png "[(-1,-1,|,-1),(1,1,|,1) ]~")
![[(1,1,|,1),(0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/190cf7fd84459a7212910f3b312d60e8.png "[(1,1,|,1),(0,0,|,0) ]")
![bb"v"=[(1-t),(t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b9e16a3a08323bb0f1364d1c95497aa8.png "bb\"v\"=[(1-t),(t)]")

![=[(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e766bfe89a28418ce539b45052b13de4.png "=[(0),(1)]")
![bb{y}(t)=c_1e^{4 t}[(-1),(1)]+ c_2e^(4t)(t[(-1),(1)] +[(0),(1)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/68d40aed5e09053099032023e6a3d1dc.png "bb{y}(t)=c_1e^{4 t}[(-1),(1)]+ c_2e^(4t)(t[(-1),(1)] +[(0),(1)])")
![c_1[(-1),(1)]+ c_2[(0),(1)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1325071af8dffbd96307a8679c40226b.png "c_1[(-1),(1)]+ c_2[(0),(1)]=")
![[(-3),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c4b2f4a86177bce6838c8835fd57713b.png "[(-3),(2)]")
,(c_1+c_2=2 ):}")

![bb{y}(t)=3e^{4 t}[(-1),(1)]-e^(4t)(t[(-1),(1)] +[(0),(1)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ea1708112a443d7544f7d5434fd54e07.png "bb{y}(t)=3e^{4 t}[(-1),(1)]-e^(4t)(t[(-1),(1)] +[(0),(1)])")
,(y_2' = 3 y_2 ),(y_3' = 5y_1- y_2 -2y_3) :},")
 = -2, \ y_2(0) = 5, \ y_3(0)=-5")
,")
![bb(y)(0)=[(-2),(5),(-5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e44bcc9e356b507053b731e0eea55f2c.png "bb(y)(0)=[(-2),(5),(-5)]")
![A=[(3,1,0),(0,3,0),(5,-1,-2) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b2bf9747e24ba18aaa67d971dd42f7e6.png "A=[(3,1,0),(0,3,0),(5,-1,-2) ]") .
.,(0,3-lambda,0),(5,-1,-2-lambda) |")
|(3-lambda,1),(0,3-lambda)|")
(3-lambda)^2")

=3")
 I)bb\"u\"=bb\"0\"")
![=[(5,1,0),(0,5,0),(5,-1,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7bbbeeb054bbab5dbb39381c9f63b20e.png "=[(5,1,0),(0,5,0),(5,-1,0) ]")
![[(5,1,0),(0,5,0),(5,-1,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d5d68d6c265aa2eb713dec18f16b5502.png "[(5,1,0),(0,5,0),(5,-1,0) ]~")
![[(1,0,0),(0,1,0),(0,0,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/237f7e45de8bc0cc9c3b35a266fe5869.png "[(1,0,0),(0,1,0),(0,0,0) ]")
=-2")
![bb"u"_1=t[(0),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/aee77b941e55c29fd2d589cef79e986c.png "bb\"u\"_1=t[(0),(0),(1)]")
![=[(0),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c0aa76e22e9821ce06e970227de29f81.png "=[(0),(0),(1)]")
 I)bb\"u\"=bb\"0\"")
![=[(0,1,0),(0,0,0),(5,-1,-5) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/516716725cce4cd72d787b0505947b3f.png "=[(0,1,0),(0,0,0),(5,-1,-5) ]")
![[(0,1,0,|,0),(0,0,0,|,0) ,(5,-1,-5,|,0) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3f8f5215753906cc817569ef43ee250a.png "[(0,1,0,|,0),(0,0,0,|,0) ,(5,-1,-5,|,0) ]~")
![[(1,0,-1,|,0),(0,1,0,|,0) ,(0,0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/95f4ff07490d82fe6bd8b389cb5c4594.png "[(1,0,-1,|,0),(0,1,0,|,0) ,(0,0,0,|,0) ]")
![bb"u"_2=t[(1),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b8f0a7a1c3edc5d1a59859d658d533ab.png "bb\"u\"_2=t[(1),(0),(1)]")
![=[(1),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a3b03aef73c51b9466daa1293f7663b7.png "=[(1),(0),(1)]")
=3,")
")
_2")
 I)bb{v} =bb{u}_2")
![[(0,1,0),(0,0,0),(5,-1,-5) ] [(v_1),(v_2),(v_3)]=[(1),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d2a786e23776770c5213297bea277cd7.png "[(0,1,0),(0,0,0),(5,-1,-5) ] [(v_1),(v_2),(v_3)]=[(1),(0),(1)]")
![[(0,1,0,|,1),(0,0,0,|,0),(5,-1,-5,|,1) ]~](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/82aef669b24d903020d3a3f74d69f3dd.png "[(0,1,0,|,1),(0,0,0,|,0),(5,-1,-5,|,1) ]~")
![[(1,0,-1,|,2/5),(0,1,0,|,1),(0,0,0,|,0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4412f7433061a526ab52aa72eef62889.png "[(1,0,-1,|,2/5),(0,1,0,|,1),(0,0,0,|,0) ]")
![bb"v"=[(2/5+t),(1),(t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/72b882fc1ec0da9b5810e674fafb5c36.png "bb\"v\"=[(2/5+t),(1),(t)]")

![=[(2/5),(1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b955c6765a6cd398e1306e85f9c2a25a.png "=[(2/5),(1),(0)]")
_1")
![bb(y)_1=e^(-2t)[(0),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4abaaacd8656066b267f67dcce668e05.png "bb(y)_1=e^(-2t)[(0),(0),(1)]")
![bb(y)_2=e^(3t)[(1),(0),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f05261947112b1988ffee68fc9b14a28.png "bb(y)_2=e^(3t)[(1),(0),(1)]")
![bb(y)_3=e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b4af683251a3c94142fbd79c1e4d0194.png "bb(y)_3=e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])")
![bb(y)(t)=c_1e^(-2t)[(0),(0),(1)] +](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/945cfdb1295dc89d21dd750dc302d48d.png "bb(y)(t)=c_1e^(-2t)[(0),(0),(1)] +")
![c_2e^(3t)[(1),(0),(1)]+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3dde38e3cd25ff1c339753ac96f1292a.png "c_2e^(3t)[(1),(0),(1)]+")
![c_3e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ae0cedbb8fa81a7f83b76188cbf67f59.png "c_3e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])")
![c_1[(0),(0),(1)] +](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/97261189dea181f651175d2abde86124.png "c_1[(0),(0),(1)] +")
![c_2[(1),(0),(1)]+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/01509b95d86b8d2e953af0186fb84c63.png "c_2[(1),(0),(1)]+")
![c_3[(2//5),(1),(0)]=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dcd4240587a81d6ea50857ae7cdb5f85.png "c_3[(2//5),(1),(0)]=")
![[(-2),(5),(-5)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dd3b2a8606ef2ec33b2507dcef810536.png "[(-2),(5),(-5)]")
,(c_3=5 ),(c_1+c_2=-5) :}")


![bb(y)(t)=-e^(-2t)[(0),(0),(1)]-](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0146d79f7b2f17ef6685ac93601d5448.png "bb(y)(t)=-e^(-2t)[(0),(0),(1)]-")
![4e^(3t)[(1),(0),(1)]+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ff276acedeadcd0ad5c2b6a7ad6f58ea.png "4e^(3t)[(1),(0),(1)]+")
![5e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/36c05bc8a689b208a7c7d1a6de74e1ca.png "5e^(3t)(t[(1),(0),(1)]+[(2//5),(1),(0)])")
![bb"y"'=[(-3,1),(-1,-5)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/360bacacdad5eaaaa9b98c9417d59726.png "bb\"y\"'=[(-3,1),(-1,-5)] bb\"y\"")
![bb"y"(t)=[(9 ),(-13)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8cf9c79b981e6b3872e75309bfd5e8b1.png "bb\"y\"(t)=[(9 ),(-13)]")
=13 e^(-4t)-4(1+t)e^(-4t)")
=-13 e^(-4t)+4te^(-4t)")
![bb"y"'=[(-6,2),(-2,-10)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3c1467fceeec68123bfc6d912d3c15f5.png "bb\"y\"'=[(-6,2),(-2,-10)] bb\"y\"")
![bb"y"(t)=[(-14 ),(-26)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/519c2409f0f19e702bba37f725d57eb6.png "bb\"y\"(t)=[(-14 ),(-26)]")
= 26 e^(-8t)-40(1+2t)e^(-8t)")
= -26 e^(-8t)+80te^(-8t)")
![bb"y"'=[(2,1,0),(0,2,0),(4,-3,-1)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d0b47dfe5b4798c677412f7812b71f09.png "bb\"y\"'=[(2,1,0),(0,2,0),(4,-3,-1)] bb\"y\"")
![bb"y"(t)=[(-9 ),(-18),(27)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1bc5a1103f368802b5b2676de35e5bf8.png "bb\"y\"(t)=[(-9 ),(-18),(27)]")
![bb(y)(t)=13e^(-t)[(0),(0),(1)]+](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/91ec65e901de3762c0299edb6c1fc0bf.png "bb(y)(t)=13e^(-t)[(0),(0),(1)]+")
![7/2e^(2t)[(3),(0),(4)]-](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/af0552ff754212501433197e93f4036e.png "7/2e^(2t)[(3),(0),(4)]-")
![6e^(2t)(t[(3),(0),(4)]+[(13//4),(3),(0)])](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0fcc5a578caef9b710c7224fd8d6ebcc.png "6e^(2t)(t[(3),(0),(4)]+[(13//4),(3),(0)])")
'=Abb(y)+bb(f)(t)")


")
'=Abb(y)")


_p")
_1, bb(y)_2, ..., bb(y)_n}")
'=A(t)bb(y)") .
.(t)=bb(y)_p+bb(y)_c")
_c=c_1bb(y)_1+c_2bb(y)_2+...+c_nbb(y)_n")

(t)=bb(y)_p+c_1bb(y)_1+c_2bb(y)_2+...+c_nbb(y)_n")
")
![Y(t)= [bb(y)_1 \ bb(y)_2 \ ... \ bb(y)_n]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/000d5aec63659080180dd2ddd4ff486d-1.png "Y(t)= [bb(y)_1 \ bb(y)_2 \ ... \ bb(y)_n]")
")
(t)=int\ Y^-1(t)bb(f)(t) dt")
_p(t)=Y(t)*bb(v)(t)")
_p(t)=Y(t)int \ Y^-1(t)bb(f)(t) dt")
![bb"y"'=[(-4,-3),(6,5)]bb"y"+[(2),(-2e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c6e69d08fd1d3d681398b2a788d4fc05.png "bb\"y\"'=[(-4,-3),(6,5)]bb\"y\"+[(2),(-2e^t)]")
 =|(lambda+4,3),(-6,lambda-5) |")
(lambda-5)+18")

(lambda+1)")
")


bb\"u\"=bb\"0\"")
![[(6,3),(-6,-3) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/468513c5eb5053861dd8d69a535c0c72.png "[(6,3),(-6,-3) ]")
![[(u_1),(u_2)]=[(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e9b1c0442c96e0d85aaf52b869bdcbfa-1.png "[(u_1),(u_2)]=[(0),(0)]")
![bb"u"_1=t[(-1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cc143b78eb613fd3944af0d7531b3292.png "bb\"u\"_1=t[(-1),(2)]")

bb\"u\"=bb\"0\"")
![[(3,3),(-6,-6) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/78d2ec3a99ffae4eb51705b0afe0ae7f.png "[(3,3),(-6,-6) ]")
![bb"u"_2=t[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d7edd41fab71b4c250b10a63da2cf820-1.png "bb\"u\"_2=t[(-1),(1)]")
![{e^(2t) [(-1),(2)], \ e^(-t) [(-1),(1)] }](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b781a469ccaca3ae4c143b54f811e96f.png "{e^(2t) [(-1),(2)], \ e^(-t) [(-1),(1)] }")
![Y(t)=[(-e^(2t),-e^-t),(2e^(2t),e^-t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/db7d9dd48e019c4e4fe46cc24f604e40.png "Y(t)=[(-e^(2t),-e^-t),(2e^(2t),e^-t)]")
![Y^-1(t)=1/(-e^(2t)e^-t+2e^(2t)e^-t)[(e^(-t),e^-t),(-2e^(2t),-e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/97b5115722fdb5aa28a9f7c54ae636d0.png "Y^-1(t)=1/(-e^(2t)e^-t+2e^(2t)e^-t)[(e^(-t),e^-t),(-2e^(2t),-e^(2t))]")
![=[(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b3dd76be9c70f4eb1b4d795721b4982f.png "=[(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))]")
")
=int\ Y^-1(t)bb\"f\"(t) dt")
![=int \ [(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))][(2),(-2e^t)] dt](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/db5570c631ae5d84972b4a025f4cb9f2.png "=int \ [(e^(-2t),e^(-2t)),(-2e^(t),-e^(t))][(2),(-2e^t)] dt")
![=int \ [(2e^(-2t)-2e^-t),(-4e^t+2e^(2t))] dt](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/10e77983c78d601ace074776d5cd0ec4.png "=int \ [(2e^(-2t)-2e^-t),(-4e^t+2e^(2t))] dt")
![=[(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7b7c8a66d8666f1770fcb768fa071679.png "=[(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]")
=Y(t).bb\"v\"(t)")
![=[(-e^(2t),-e^-t),(2e^(2t),e^-t)][(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2c9343797188975a44b493cd34dbfd93.png "=[(-e^(2t),-e^-t),(2e^(2t),e^-t)][(-e^(-2t)+2e^-t),(-4e^t+e^(2t))]")
![=[(5-3e^t),(-6+5e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2736aea97ed6001185d60c30ede23371.png "=[(5-3e^t),(-6+5e^t)]")

![+c_1e^(2t) [(-1),(2)] +c_2e^(-t) [(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d786006b25748f15420fa8bb3ec73895.png "+c_1e^(2t) [(-1),(2)] +c_2e^(-t) [(-1),(1)]")
![bb"y"=[(5-3e^t),(-6+5e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/74a23b6bb6924cd15c520aeeebda447b.png "bb\"y\"=[(5-3e^t),(-6+5e^t)]")
![+[(-e^(2t),-e^-t),(2e^(2t),e^-t)] [(c_1),(c_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3f6e27414ef4c1628576d54d93edeced.png "+[(-e^(2t),-e^-t),(2e^(2t),e^-t)] [(c_1),(c_2)]")
![bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)+[(2e^t),(0),(-e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ce9eb99af0c095407c0add2d74fde843.png "bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)+[(2e^t),(0),(-e^(2t))]")
![bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5959eac6d6adf680cd1e706a9440ae78.png "bb(y)'=[(3,14,-13),(0,11,-7),(0,14,-10)]bb(y)")
![bb(f)(t)=[(2e^t),(0),(-e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/61d942657bd581b8e39c47f8da146f1a.png "bb(f)(t)=[(2e^t),(0),(-e^(2t))]")
![{e^(3t) [(1),(0),(0)], \ e^(4t) [(1),(1),(1)] ,\ e^(-3t)[(2),(1),(2)] }](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0deb39c7e0345f354db2c992df8d262c.png "{e^(3t) [(1),(0),(0)], \ e^(4t) [(1),(1),(1)] ,\ e^(-3t)[(2),(1),(2)] }")
![Y"(t)=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/955c95dc2fcb264e99df1b45dc0ea4b5.png "Y\"(t)=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]")
![[Y|I]~[I|Y^-1]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/07daec0952ea2ca5425a61567d9b5830.png "[Y|I]~[I|Y^-1]")
![Y^-1=[(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/29a939aac4e1fd310744133c97ad4bd6.png "Y^-1=[(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ]")
(t)")
![=int \ [(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ] [(2e^t),(0),(-e^(2t))] dt](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c3c28e8a239f5fe70298875f7903eb32.png "=int \ [(e^(-3t),0,-e^(-3t)),(0,2e^(-4t),-e^(-4t) ),(0,-e^(3t),e^(3t) ) ] [(2e^t),(0),(-e^(2t))] dt")
![=int \ [(2e^(-2t)+e^(-t)),(e^(-2t)),(-e^(5t))] dt](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d1b9e63f7ac25f00fbc016c4d6fc4e62.png "=int \ [(2e^(-2t)+e^(-t)),(e^(-2t)),(-e^(5t))] dt")
![=[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/d07c3c2515bc74ad35b40da6446c2788.png "=[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]")
![=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/90f921651a5594c31914188221cf488c.png "=[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ]")
![[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/48ed3e18cd8f3462cba330d7cd2c81a9.png "[(-e^(-2t)-e^(-t)),(-1/2e^(-2t)),(-1/5e^(5t))]")
![=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a08f2a0ee4bd9960514405bb1a1ba5c7.png "=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]")
![bb(y)(t)=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))] +](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/83549c2ca081dec05d20914cdc9e07ac.png "bb(y)(t)=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))] +")
![c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b18254164f9167ab7f262cfd018899e7.png "c_1e^(3t) [(1),(0),(0)]+c_2 e^(4t) [(1),(1),(1)]+c_3e^(-3t)[(2),(1),(2)]")
![bb"y"=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/3447c0b1d3cb865a6d89e5f7091ccb5f.png "bb\"y\"=1/10[(-10e^(t)-19e^(2t)),(-7e^(2t)),(-9e^(2t))]")
![+[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ] [(c_1),(c_2),(c_3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ef0f85e6f5d5adb2c08e46d5839defc6.png "+[(e^(3t),e^(4t),2e^(-3t)),(0,e^(4t),e^(-3t) ),(0,e^(4t),2e^(-3t) ) ] [(c_1),(c_2),(c_3)]")
![bb"y'"=[(-25,36),(-18,26)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0cfb5490807641faadba4c7654f75a2c.png "bb\"y'\"=[(-25,36),(-18,26)] bb\"y\"")
![+[(-2),(5 e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/404052f200ef1e4c2eaa9517879d2543.png "+[(-2),(5 e^t)]")
![bb(y)(t)=[(-26-90 e^t),(-18-65 e^t)]+[(3e^-t,4e^(2t)),(2e^-t,3e^(2t))][(c_1),(c_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/323ebc77fb623c37f9b254e815489d52.png "bb(y)(t)=[(-26-90 e^t),(-18-65 e^t)]+[(3e^-t,4e^(2t)),(2e^-t,3e^(2t))][(c_1),(c_2)]")
![bb"y'"=[(5,3),(-6,-4)] bb"y"](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e9b37c4ca61fe7d497ec38e25222cef4.png "bb\"y'\"=[(5,3),(-6,-4)] bb\"y\"")
![+[(2),(5 e^t)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b713ac20cead32f01c8687235006df36.png "+[(2),(5 e^t)]")
![bb(y)(t)=[(-4-7.5 e^t),(6+10 e^t)]+[(-e^-t,-e^(2t)),(2e^-t,e^(2t))][(c_1),(c_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a7b1e8b088beea791cfe876b2218cbd6.png "bb(y)(t)=[(-4-7.5 e^t),(6+10 e^t)]+[(-e^-t,-e^(2t)),(2e^-t,e^(2t))][(c_1),(c_2)]")
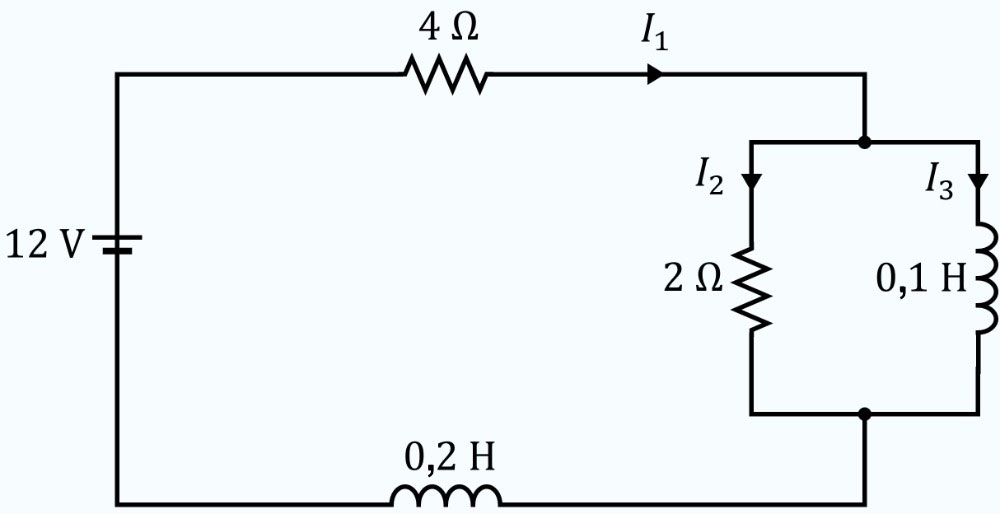

,(0.1I'_3-2I_2=0), (I_1-I_2-I_3=0) :}")

=I_2(0)=I_3(0)=0")


,(I'_3=20I_2), (I_1-I_2-I_3=0) :}")




,(I'_3=20I_1-20I_3) :}")
=I_3(0)=0")
![bb(I)'=[(-30,10),(20,-20)] bb(I)+[(60),(0)],](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/17de568f58e36fe6148b568656fcb261.png "bb(I)'=[(-30,10),(20,-20)] bb(I)+[(60),(0)],")
![bb(I)(0)=[(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/59e432c048d6932b439764b0dec96f8c.png "bb(I)(0)=[(0),(0)]")
=det(A-lambda I)")
,(20,-20-lambda) |")
(-20-lambda)-200")

(lambda+40)")

![bb(u)_1=[(1),(2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1c1d03aad5acdc2859530199692c81be.png "bb(u)_1=[(1),(2)]")

![bb(u)_1=[(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/df09fdb5df817afd8006545d216b2cce.png "bb(u)_1=[(-1),(1)]")
![{e^(-10t) [(1),(2)], \ e^(-40t) [(-1),(1)] }](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/064b7aa8876b583ac3942c72b5e26e3f.png "{e^(-10t) [(1),(2)], \ e^(-40t) [(-1),(1)] }")
")
![I_c(t)=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/0427d8ed908c32cca6bd9dfa5363862a.png "I_c(t)=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))]")
")
![I_c^-1(t)=1/3[(e^(10t),e^(10t)),(-2e^(40t),e^(40t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/78e7a6299914cf8605798c2493fd60f7.png "I_c^-1(t)=1/3[(e^(10t),e^(10t)),(-2e^(40t),e^(40t))]")
=int\ I_c^-1(t)bb\"f\"(t) dt")
![=int \ [(e^(10t),e^(10t)),(-2e^(40t),e^(40t))] [(60),(0)] dt](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/2ba0b8522b557eea386d23f50cd002f1.png "=int \ [(e^(10t),e^(10t)),(-2e^(40t),e^(40t))] [(60),(0)] dt")
![=[(2e^(10t)),(-e^(40t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5b9da92cf9760cc7e9a48e3e28d22a0a.png "=[(2e^(10t)),(-e^(40t))]")
=I_c(t).bb\"v\"(t)")
![=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))] [(2e^(10t)),(-e^(40t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e513cdec178b8f80b0fbaa04017c482c.png "=[(e^(-10t),-e^(-40t)),(2e^(-10t),e^(-40t))] [(2e^(10t)),(-e^(40t))]")
![=[(3),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7cfe4ad1afdfb45ab51d5dd5af07b84f.png "=[(3),(3)]")
_p+bb(I)_c")
![+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1d8ed9fff79a2c456ab0414d35a7fca0.png "+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]")
![[(3),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cd64ae3c2ba7f96a0f0e665e718f11df.png "[(3),(3)]")
![+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]=[(0),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4c7c7d21f7162b4042f4181629836b02.png "+c_1e^(-10t) [(1),(2)] +c_2e^(-40t) [(-1),(1)]=[(0),(0)]")
,(2c_1+c_2=-3 ) :}")


![bb(I)=[(3),(3)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b569551c19338ff3b650f7e7774b2738.png "bb(I)=[(3),(3)]")
![-2e^(-10t) [(1),(2)] +e^(-40t) [(-1),(1)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f3a912dda20a2d0ffb6becb48aa58ef8.png "-2e^(-10t) [(1),(2)] +e^(-40t) [(-1),(1)]")
-e^(-40t)")
+e^(-40t)")
-2e^(-40t)")
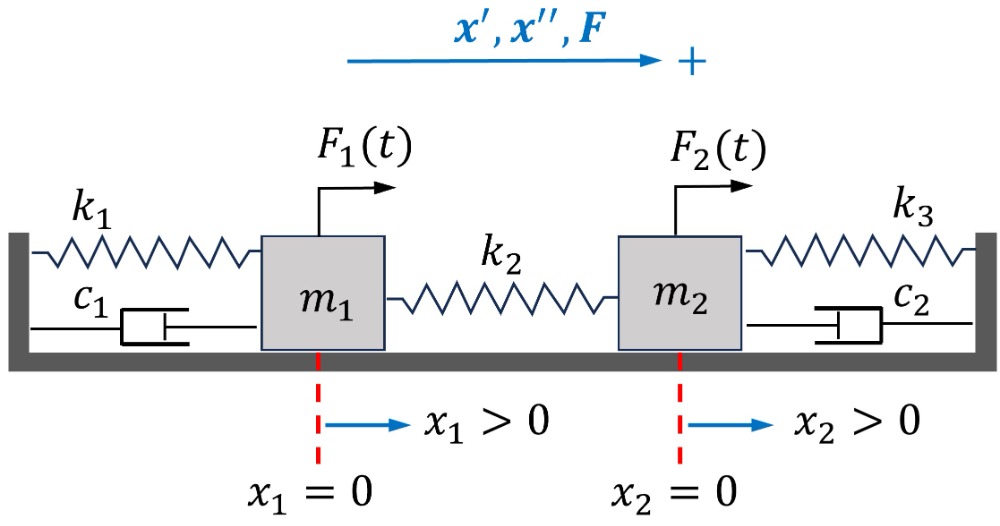




")
")





=-k_1x_1")
=-k_2(x_2-x_1)")

=-c_1x_1'")
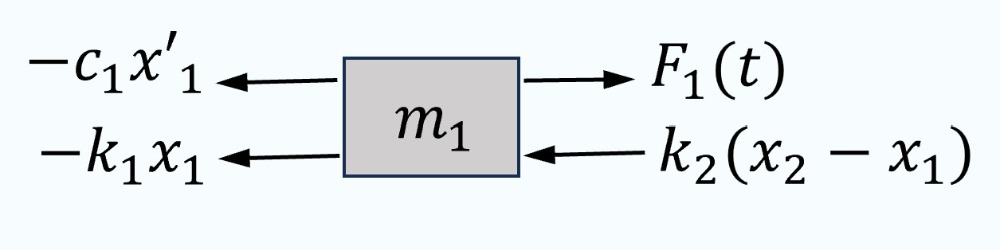

+F_1(t)")
x_1+k_2x_2+F_1(t)")

=-k_3x_2")
=k_2(x_2-x_1)")
=-c_2x_2'")
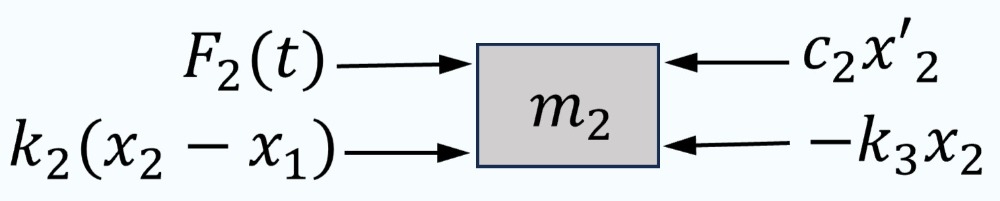
+F_2(t)")
x_2+F_2(t)")
 0″ title= »-k_2(x_2-x_1)>0″ class= »asciimath mathjax »>
0″ title= »-k_2(x_2-x_1)>0″ class= »asciimath mathjax »>




y_1+k_2y_3+F_1(t)")

y_3+F_2(t)")
'(t)=Abb(y)(t)+bb(f)(t)")
![bb(y)'(t)=[(0,1,0,0),(-(k_1+k_2)/(m_1),(c_1)/(m_1),(k_2)/(m_1),0),(0,0,0,1),((k_2)/(m_2),0,-(k_2+k_3)/(m_2) ,-(c_2)/(m_2))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ce310c7d5b4cce79f6e3b2f11d0b6e39.png "bb(y)'(t)=[(0,1,0,0),(-(k_1+k_2)/(m_1),(c_1)/(m_1),(k_2)/(m_1),0),(0,0,0,1),((k_2)/(m_2),0,-(k_2+k_3)/(m_2) ,-(c_2)/(m_2))]")
![bb(y)(t)+[(0),((F_1(t))/(m_1)),(0),((F_2(t))/(m_2)) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f867fcf9fe06c04755c538d99bc7ab61.png "bb(y)(t)+[(0),((F_1(t))/(m_1)),(0),((F_2(t))/(m_2)) ]")
=0")
=0")
=1")
=0")




=1\ \"m\"")
=x_2'(0)=0")
![bb(y)=[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/6ead37e9844db7674e33f1e5e5c72d9e.png "bb(y)=[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]")
![bb(y)'(t)=[(0,1,0,0),(-2,0,1,0),(0,0,0,1),(1,0,-2 ,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a7db0bf2da8f5dd02a945f478efe1da7.png "bb(y)'(t)=[(0,1,0,0),(-2,0,1,0),(0,0,0,1),(1,0,-2 ,0)]")
![bb(y)(t), \ \ bb(y)(0)=[(0),(0),(1),(0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/698d1c885cd3cf844b1a6784ecdcad3b.png "bb(y)(t), \ \ bb(y)(0)=[(0),(0),(1),(0) ]")
=+-i")
![bb(u)_(1,2)=[(0),(1),(0),(1)]+-i [(-1),(0),(-1),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7dcf02a0ab3cb91ba3bfb72a726ffa4a.png "bb(u)_(1,2)=[(0),(1),(0),(1)]+-i [(-1),(0),(-1),(0)]")
=+-sqrt(3)i")
![bb(u)_(3,4)=[(0),(-3),(0),(3)]+-i [(sqrt(3)),(0),(-sqrt(3)),(0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/63e1d7e529fb616585680175d65aaf89.png "bb(u)_(3,4)=[(0),(-3),(0),(3)]+-i [(sqrt(3)),(0),(-sqrt(3)),(0)]")

![bb"y"_1=[(0),(1),(0),(1)] cos(t)-[(-1),(0),(-1),(0)] sin( t)=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/5617cb55270d2dbe12a325818021ba33.png "bb\"y\"_1=[(0),(1),(0),(1)] cos(t)-[(-1),(0),(-1),(0)] sin( t)=")
![[(sin(t)),(cos(t)),(sin(t)),(cos(t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8c3b481db38762e1ce5e9666b100bcbf.png "[(sin(t)),(cos(t)),(sin(t)),(cos(t))]")
![bb"y"_2=[(0),(1),(0),(1)] sin(t)+[(-1),(0),(-1),(0)]cos( t)=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f2ba801bbe97fe2bf41308d23153f7de.png "bb\"y\"_2=[(0),(1),(0),(1)] sin(t)+[(-1),(0),(-1),(0)]cos( t)=")
![[(-cos(t)),(sin(t)),(-cos(t)),(sin(t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7ade188ab69d14406fec6ca72e9b69ee.png "[(-cos(t)),(sin(t)),(-cos(t)),(sin(t))]")
i")
![bb"y"_3=[(0),(-3),(0),(3)] cos(sqrt(3) t)-[(sqrt(3)),(0),(-sqrt(3)),(0)] sin( sqrt(3) t)=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/973eea282e06eb051aa43c5774aad673.png "bb\"y\"_3=[(0),(-3),(0),(3)] cos(sqrt(3) t)-[(sqrt(3)),(0),(-sqrt(3)),(0)] sin( sqrt(3) t)=")
![[(-sqrt(3) sin(sqrt(3) t)),(-3cos(sqrt(3) t)),(sqrt(3) sin(sqrt(3) t)),(3cos(sqrt(3) t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/679114a2d2dca086e4b7970db2e6e049.png "[(-sqrt(3) sin(sqrt(3) t)),(-3cos(sqrt(3) t)),(sqrt(3) sin(sqrt(3) t)),(3cos(sqrt(3) t))]")
![bb"y"_4=[(0),(-3),(0),(3)] sin(sqrt(3) t)+[(sqrt(3)),(0),(-sqrt(3)),(0)] cos( sqrt(3) t)=](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b4a365690dd809c4d25c87a9451931e0.png "bb\"y\"_4=[(0),(-3),(0),(3)] sin(sqrt(3) t)+[(sqrt(3)),(0),(-sqrt(3)),(0)] cos( sqrt(3) t)=")
![[(sqrt(3) cos(sqrt(3) t)),(-3sin(sqrt(3) t)),(-sqrt(3) cos(sqrt(3) t)),(3sin(sqrt(3) t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e3b0651b9bc9694fcfafc66e69ea3927.png "[(sqrt(3) cos(sqrt(3) t)),(-3sin(sqrt(3) t)),(-sqrt(3) cos(sqrt(3) t)),(3sin(sqrt(3) t))]")
=")
![[(bb(y)_1,bb(y)_2, bb(y)_3, bb(y)_4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/77e5c54fbb95f0b5f43f7333322df5bd.png "[(bb(y)_1,bb(y)_2, bb(y)_3, bb(y)_4)]")
![= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/601fa47b2cd520c7982e4dbbc12680b6.png "= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]")
![bb(y)(t)= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ede967ace86f9e5be043e13235c01ab5.png "bb(y)(t)= [(sin(t),-cos(t),-sqrt(3) sin(sqrt(3) t),sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),-3 cos(sqrt(3) t),-3sin(sqrt(3) t)),(sin(t),-cos(t),sqrt(3) sin(sqrt(3) t),-sqrt(3) cos(sqrt(3) t)),(cos(t),sin(t),3 cos(sqrt(3) t),3 sin(sqrt(3) t))]")
![[(c_1),(c_2),(c_3),(c_4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c45f9355d1ce74d1e106597eb503cca6.png "[(c_1),(c_2),(c_3),(c_4)]")
![bb(y)(0)=[(0),(0),(1),(0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/e09334cb97cec1b194b0661782673030.png "bb(y)(0)=[(0),(0),(1),(0) ]")
![[(0,-1,0,sqrt(3)),(1,0,-3,0),(0,-1,0,-sqrt(3)),(1,0,3 ,0)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f7c228b13a28affbcd4a1e6950dcbecd.png "[(0,-1,0,sqrt(3)),(1,0,-3,0),(0,-1,0,-sqrt(3)),(1,0,3 ,0)]")
![=[(0),(0),(1),(0) ]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/dfbd4d77a475401e4be11534640c72a1.png "=[(0),(0),(1),(0) ]")

![[(0),(-1/2),(0),(-sqrt(3)/6)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a7328b65996b96bdf11655e6cf4ceccf.png "[(0),(-1/2),(0),(-sqrt(3)/6)]")
![bb(y)=[(y_1),(y_2),(y_3),(y_4)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/a698eccc789d16c0387900eb67ebac57.png "bb(y)=[(y_1),(y_2),(y_3),(y_4)]")

![[(1/2cos(t)-1/2cos(sqrt(3)t)),(-1/2sin(t)+(sqrt(3))/2sin(sqrt(3)t)),(1/2cos(t)+1/2cos(sqrt(3)t)),(-1/2sin(t)-(sqrt(3))/2sin(sqrt(3)t))]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/542c1c51d5c60ffaf23184052651a975.png "[(1/2cos(t)-1/2cos(sqrt(3)t)),(-1/2sin(t)+(sqrt(3))/2sin(sqrt(3)t)),(1/2cos(t)+1/2cos(sqrt(3)t)),(-1/2sin(t)-(sqrt(3))/2sin(sqrt(3)t))]")
_n")
![[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/4717b1fc82ce444670b544be6bbfe49d.png "[(y_1),(y_2),(y_3),(y_4)]=[(x_1),(x'_1),(x_2),(x'_2)]")
-1/2cos(sqrt(3)t)")
+1/2cos(sqrt(3)t)")
=2")
=0")
+sqrt(3)/3sin(sqrt(3)t)")
-sqrt(3)/3sin(sqrt(3)t)")

")

![f(x) = a_0 + somme_{n = 1}^{infty} [a_n cos(frac{npi x}{L}) + b_n sin(frac{npi x}{L})]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8c13e408d45e96ba59b43f35c374f63a.png "f(x) = a_0 + somme_{n = 1}^{infty} [a_n cos(frac{npi x}{L}) + b_n sin(frac{npi x}{L})]")



 dx")
 cos(frac{npi x}{L}) dx")

 sin(frac{npi x}{L}) dx")
 = -f(x)")
 = f(x)")
 = x")
![[-2,2]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ef8463565c3162f8ddceeb520d873307.png "[-2,2]")

![f(x) = a_0 + somme_{n = 1}^{infty} [a_n cos(frac{npi x}) + b_n sin(frac{npi x})]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/71a2f4d72f12ba29d6440b7e00367736.png "f(x) = a_0 + somme_{n = 1}^{infty} [a_n cos(frac{npi x}) + b_n sin(frac{npi x})]")

 dx,")
 dx,")

 dx")
![= [-(2x) / (npi)cos((npix) / 2)]_0^2 + 2 / (npi) int_0^2cos((npix) / 2 )dx](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ee2f315dfd92ffe0c76e4075db0a1e2b.png "= [-(2x) / (npi)cos((npix) / 2)]_0^2 + 2 / (npi) int_0^2cos((npix) / 2 )dx")
![= [-(2x) / (npi)cos((npix) / 2) + 4 / (npi)^2 sin((npix) / 2 )]_0^2](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/cbc0f94be4fbad554f50070e1867ff6a.png "= [-(2x) / (npi)cos((npix) / 2) + 4 / (npi)^2 sin((npix) / 2 )]_0^2")
) / (npi)")
 = (-1)^n")
^(n+1)) / (npi)")
 = somme_{n = 1}^{infty} (4(-1)^(n + 1)) / (npi) sin(frac{npi x})")


![[−2,2]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/831ced5ca2e4ac94c223e66ad444a634.png "[−2,2]") . L’approximation de la série de Fourier, représentée par une ligne en pointillés bleus, illustre la manière dont une fonction peut être représentée comme une somme de fonctions sinusoïdales plus simples. Le nombre de termes inclus dans l’approximation de la série de Fourier peut être ajusté dynamiquement à l’aide d’un curseur interactif, allant de 1 à 10 termes. Cette caractéristique permet d’observer l’impact de l’augmentation du nombre de termes de la série sur la précision de l’approximation de la fonction réelle. La fonction linéaire
. L’approximation de la série de Fourier, représentée par une ligne en pointillés bleus, illustre la manière dont une fonction peut être représentée comme une somme de fonctions sinusoïdales plus simples. Le nombre de termes inclus dans l’approximation de la série de Fourier peut être ajusté dynamiquement à l’aide d’un curseur interactif, allant de 1 à 10 termes. Cette caractéristique permet d’observer l’impact de l’augmentation du nombre de termes de la série sur la précision de l’approximation de la fonction réelle. La fonction linéaire  = x^2")

 dx,")
 dx,")


![a_0 = 1 / 2 int_{0}^ x^2 dx = 1 / 2[x^3 / 3]_0^2 = 4 / 3](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/98bb30911e9d0606e28c629f39ff5c90.png "a_0 = 1 / 2 int_{0}^ x^2 dx = 1 / 2[x^3 / 3]_0^2 = 4 / 3")
 dx")
![= [(2x^2) / (npi)sin((npix) / 2)]_0^2-4 / (npi) int_0^2 xsin((npix) / 2 ) dx](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/c82846c6e37aa3b1c10f4158ec167e0a.png "= [(2x^2) / (npi)sin((npix) / 2)]_0^2-4 / (npi) int_0^2 xsin((npix) / 2 ) dx")
![= [(2x^2) / (npi)sin((npix) / 2)-16 / (npi)^3((-npi) / 2xcos((npix) / 2) + sin((npix) / 2))]_0^2](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f7cbc193b0ec6fb70a3a01f669ad0db2.png "= [(2x^2) / (npi)sin((npix) / 2)-16 / (npi)^3((-npi) / 2xcos((npix) / 2) + sin((npix) / 2))]_0^2")
cos(npi)")
^(n)) / (n^2pi^2)")
 = 4 / 3 + somme_{n = 1}^{infty} (16(-1)^(n)) / (n^2pi^2) cos(frac{npi x})")

 = 4 x")
![[-1,1]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/557727178bd58255d8caa19f5372ddb4.png "[-1,1]")
 = somme_{n=1}^{infty} (8(-1)^(n+1)) / (npi) sin(npi x)")
 = 1-x^2")
 = 2 / 3 - somme_{n=1}^{infty} (4(-1)^(n)) / (n^2pi^2) cos(npi x)")

")






 / (delx^2)")
 / (delt)(x,t) = beta^2(del^2u) / (delx^2)(x,t)")
 = f(x)")

 = 0 quad text{and} quad u(L, t) = 0")
 = f(x)")
 = X(x)T(t)")
X(x) = beta^2X''(x)T(t)")
T(t)")
}{T(t)} = frac{X''(x)}{X(x)}")


}{T(t)} = frac{X''(x)}{X(x)} = -lambda")
}{X(x)} = -lambda")
}{T(t)} = -lambda")
 + lambda X(x) = 0")
 = 0")
 = r^2 + lambda")

")
 = c_1cos(sqrt(lambda)x) + c_2sin(sqrt(lambda)x)")
 = 0")

 = 0")
) = 0")
) = 0")

 = npi")
^2 quad text{and} quad X_n(x) = singauche( frac{npi x}{L} droite)")

 = c_1 + c_2x")

 = c_1e^(-sqrt(lambda)x) + c_2e^(sqrt(lambda)x)")

) + c_2e^(Lsqrt(lambda)) = 0")
) -e^(-Lsqrt(lambda)) ) = 0")
) -e^(-Lsqrt(lambda)) = 0")
^2")
 + beta^2 gauche( frac{npi}{L} droite)^2 T(t) = 0")

 = ce^{-beta^2 gauche( frac{npi}{L} droite)^2 t}")

")

 = singauche( frac{npi x}{L} droite)")
 = B_n singauche( frac{npi x}{L} droite) e^{-beta^2 gauche( frac{npi}{L} droite)^2 t}")
 = somme_{n = 1}^{infty} B_n singauche( frac{npi x}{L} droite) e^{-beta^2 gauche( frac{npi}{L} droite)^2 t}")

 = f(x) = somme_(n = 1)^ooB_n sin((npix) / L)")
![[0,L]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/f735caea0d128c5937b57c7ef8a1e6cb.png "[0,L]")
sin((npix) / L) dx")
 / (delt)(x,t) = 5(del^2u) / (delx^2)(x,t) \ ,")


 = u(pi,t) = 0\ ,")

 = 6sin(x) + 7sin(5x)")


")
 e^0 =")
 + 7sin(5x)")
 =")




 = somme_(n = 1)^oo B_n e^(-beta^2(npi / / L)^2t)sin((npix) / L)")
 = B_1e^(-5((1)pi / / pi)^2t)sin(((1)pix) / pi) + B_5e^(-5((5)pi / / pi)^2t)sin(((5)pix) / pi)")
 = 6e^(-5t)sin(x) + 7e^(-125 t)sin(5x)")
 / (delt)(x,t) = 9(del^2u) / (delx^2)(x,t) \ ,")

 = u(4,t) = 0\ ,")
 = x")


sin((npix) / L)dx")
 / 4)dx")
![B_n = [-2 / (npi)xcos((npix) / 4)]_0^4 + 2 / (npi)int_0^4cos((npix) / 4)dx](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/ee57ec804bc06cf6795e24a20e6da4f6.png "B_n = [-2 / (npi)xcos((npix) / 4)]_0^4 + 2 / (npi)int_0^4cos((npix) / 4)dx")
cos(npi) + 8 / (n^2pi^2) sin(npi)")
^(n + 1)8 / (npi)")
 = 8 / (pi)somme_(n = 1)^oo (-1)^(n + 1) / n e^(-9(npi / / 4)^2t)sin((npix) / 4)")
 / (delx)(0,t) = 0")
 = 0 quad text{and} quad u_x(L, t) = 0")
 = A_0 + somme_{n = 1}^{infty} A_n cos( frac{npi x}{L} ) e^{-beta^2 ( frac{npi}{L} )^2 t}")
 = A_0 + somme_{n = 1}^{infty} A_n cos( frac{npi x}{L} )")


 dx")
 cos(frac{npi x}{L}) dx")
 / (delt)(x,t) = 4(del^2u) / (delx^2)(x,t) \ ,")

 = u_x(2,t) = 0\ ,")
 = 5x^2,")


 = 5x^2")
![A_0 = frac int_{0}^ 5x^2 dx = 5 / 2[x^3 / 3]_0^2 = 20 / 3](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/b3c92d3b38819686132c35076eca2b63.png "A_0 = frac int_{0}^ 5x^2 dx = 5 / 2[x^3 / 3]_0^2 = 20 / 3")
 dx")
![= [(10x^2) / (npi)sin((npix) / 2)]_0^2-20 / (npi) int_0^2 xsin((npix) / 2 ) dx](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/1c3b94bc15cfde4dfc909658aedf905f.png "= [(10x^2) / (npi)sin((npix) / 2)]_0^2-20 / (npi) int_0^2 xsin((npix) / 2 ) dx")
![= [(10x^2) / (npi)sin((npix) / 2)-80 / (npi)^3((-npi) / 2xcos((npix) / 2) + sin((npix) / 2))]_0^2](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/7b1ebbcc1eae671412e5fd99aaab1920.png "= [(10x^2) / (npi)sin((npix) / 2)-80 / (npi)^3((-npi) / 2xcos((npix) / 2) + sin((npix) / 2))]_0^2")
cos(npi)")
^(n)) / (n^2pi^2)")
^(n)) / (n^2pi^2) cos( frac{npi x} ) e^{-4 ( frac{npi} )^2 t}")
 / (del t) = 5 (del^2u) / (del x^2),")

 = u(3,t) = 0,")
 = 6,")

 = somme_(n = 1)^oo(12(1-(-1)^n)) / (npi)sin((npix) / 3)e^(-5((npi) / 3)^2t)")
 / (delt)(x,t) = 2(del^2u) / (delx^2)(x,t) \ ,")

 = -2sin(4x)-7sin(5x),")
 = -2 e^(-32t)sin(4x)-7 e^(-50t)sin(5x)")
 / (delt)(x,t) = 6 (del^2u) / (delx^2)(x,t) ,")
 = u_x(3,t) = 0,")
 = 5 x^2,")
 = 15 + somme_(n = 1)^oo(180 (-1)^n) / (n^2 pi^2) cos((n pi x) / 3) e^(-6((n pi) / 3)^2 t)")
 / (delt^2)(x,t) = alpha^2(del^2u) / (delx^2)(x,t) \ ,")

 = u(L,t) = 0\ ,")
 = f(x)\ ,")
 / (delt)(x,0) = g(x)\ ,")
![u(x,t) = somme_(n = 1)^oo[A_n cos((npialphat) / L) + (B_nL) / (npialpha)sin((npialphat) / L )]](https://ecampusontario.pressbooks.pub/app/uploads/sites/4139/2024/03/8546d96f1d4f63ab70c10f4412a15fc8.png "u(x,t) = somme_(n = 1)^oo[A_n cos((npialphat) / L) + (B_nL) / (npialpha)sin((npialphat) / L )]")
 / L)")
 = somme_(n = 1)^ooA_n sin((npix) / L)")
 = somme_(n = 1)^ooB_n sin((npix) / L)")
")
sin((npix) / L) dx")
sin((npix) / L) dx")
 / (delt^2)(x,t) = 4(del^2u) / (delx^2)(x,t) \ ,")
 ,
, = sin(3x)-1 / 2sin(5x) ,")
 / (delt)(x,0) = sin(4x) + 2sin(6x)\ ,")

 = sin(3x)-1 / 2sin(5x)")
 = sin(4x) + 2sin(6x)")

")
 =")
^oo (A_n cos(0) + B_n / (2n)sin(0) )sin(nx)")
^oo A_nsin(nx)")
 = sin(3x)-1 / 2sin(5x)")
^oo A_nsin(nx)")
-1 / 2sin(5x)")


 / (delt)(x,t)")
^oo (-2nA_n sin(2nt) + B_ncos(2nt) )sin(nx)")
 / (delt)(x,0)")
^oo (-2nA_n sin(0) + B_ncos(0) )sin(nx)")
^oo B_nsin(nx)")
 / (delt)(x,0) = sin(4x) + 2sin(6x)")
^oo B_nsin(nx)")
 + 2sin(6x)")


 = somme_(n = 1)^oo (A_n cos(2nt) + B_n / (2n)sin(2nt))sin(nx)")
 = cos(6t)sin(3x) + 1 / 8sin(8t)sin(4x)")
sin(5x) + 1 / 6sin(12t)sin(6x)")
 / (delt^2)(x,t) = 9 (del^2u) / (delx^2)(x,t) ,")

 = u(pi,t) = 0,")
 = -sin(x) + 3sin(7x),")
 / (delt)(x,0) = -2sin(4x) + sin(10x)")

 = -cos(3t)sin(x)-1 / 6sin(12t)sin(4x) +")
sin(7x) + 1 / 30sin(30t)sin(10x)")
 / (delt^2)(x,t) = 4 (del^2u) / (delx^2)(x,t) ,")
 = -sin(x) + 3sin(3x),")
 / (delt)(x,0) = -4sin(2x) + 3sin(6x)")
 = -cos(2t)sin(x)-sin(4t)sin(2x) +")
sin(3x) + 1 / 4sin(12t)sin(6x)")